You might also like
- Electromechanical Energy Conversion Lab ReportDocument14 pagesElectromechanical Energy Conversion Lab ReportNic0sNo ratings yet
- Immersion Biometry (Presentation Rhonda Waldron) PDFDocument19 pagesImmersion Biometry (Presentation Rhonda Waldron) PDFrcortez1986100% (1)
- Strain Gauge Based AccelerometerDocument13 pagesStrain Gauge Based Accelerometeranandakumarmts0% (1)
- Vibration TransducerDocument7 pagesVibration TransducerPrakash Kumar100% (1)
- Linear and Rotational Displacement MeasurementDocument39 pagesLinear and Rotational Displacement MeasurementAbhimanyu BhagatNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- What Colors Look Good On Me Jen ThodenDocument20 pagesWhat Colors Look Good On Me Jen Thodenaruunstalin67% (3)
- Thermal Radiation Heat TransferDocument194 pagesThermal Radiation Heat Transfersandyengineer13No ratings yet
- Measure of Angular VelocityDocument12 pagesMeasure of Angular VelocityAshley_Rulzzzzzzz100% (2)
- Theory of Operation of Rate SensorsDocument4 pagesTheory of Operation of Rate SensorsPhạm Ngọc HòaNo ratings yet
- ENCODERSDocument11 pagesENCODERSRabi khanNo ratings yet
- University of Tabuk: Mechanical Engineering DepartmentDocument11 pagesUniversity of Tabuk: Mechanical Engineering DepartmentJoker AzzamNo ratings yet
- Vibration MeasurementDocument23 pagesVibration MeasurementAxenta100% (2)
- Unit 4Document16 pagesUnit 4udayoleti21005a0406No ratings yet
- Accelerometer Balance SystemDocument6 pagesAccelerometer Balance Systemsenthilkumar99No ratings yet
- 3.2 Sensors and TransducersDocument38 pages3.2 Sensors and Transducersjohanna shaanyenengeNo ratings yet
- Rapport InductosynDocument13 pagesRapport InductosynHemant SavlaNo ratings yet
- Design and Development of A Fluxgate MagnetometerDocument5 pagesDesign and Development of A Fluxgate Magnetometerdr_oxide2No ratings yet
- Turbo Supervisory Instruments: Presenter: Chona (C & I)Document25 pagesTurbo Supervisory Instruments: Presenter: Chona (C & I)Morassa Chona100% (1)
- Sensors Velocity ResolversDocument17 pagesSensors Velocity ResolversAravind ManneNo ratings yet
- Speed SensorsDocument8 pagesSpeed Sensorsajd.nanthakumarNo ratings yet
- Turbovisory SystemDocument2 pagesTurbovisory SystemLily Sharma100% (1)
- Ultrasonic MotorDocument11 pagesUltrasonic MotorShivang AgrawalNo ratings yet
- EECC0097Document6 pagesEECC0097Predrag PejicNo ratings yet
- Strain Gauge Based Accelerometer PDFDocument13 pagesStrain Gauge Based Accelerometer PDFMarcell LandryNo ratings yet
- Lifting TrainingDocument9 pagesLifting TrainingMohamed OmarNo ratings yet
- Principles of Measurement and Instrumentation EKT 112: OscilloscopeDocument40 pagesPrinciples of Measurement and Instrumentation EKT 112: OscilloscopesambavaleNo ratings yet
- Questions and AnswersDocument15 pagesQuestions and AnswersMahtab GhummanNo ratings yet
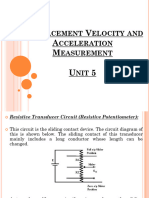
- Unit 5 Displacement, Velocity and Acceleration MeasurementDocument26 pagesUnit 5 Displacement, Velocity and Acceleration Measurementbhuyanuttam7No ratings yet
- Inductive TransducerDocument5 pagesInductive TransducerapangirearnavNo ratings yet
- A.C.Synchronous Transmitter Manual PDFDocument15 pagesA.C.Synchronous Transmitter Manual PDFAbhishek RajNo ratings yet
- Turbine Speed MeasurementDocument26 pagesTurbine Speed MeasurementAyyar Kandasamy100% (4)
- 1.1 Introduction:-: Function of Power CylinderDocument18 pages1.1 Introduction:-: Function of Power CylinderAbhishek SahaNo ratings yet
- Measurement of VelocityDocument59 pagesMeasurement of VelocityYogeshBhatt100% (1)
- Mathematical Modeling Simulation and Control of Ball and Beam SystemDocument5 pagesMathematical Modeling Simulation and Control of Ball and Beam SystemCamilo Andrés BeltránNo ratings yet
- EEM Unit 2Document20 pagesEEM Unit 2Bhavesh BodkeNo ratings yet
- Broadband Fluxgate MagnetometerDocument8 pagesBroadband Fluxgate MagnetometerJose Roberto0% (1)
- Cathode Ray Oscilloscope:: - Megha Agrawal Ece 2 Year, Mnit JaipurDocument12 pagesCathode Ray Oscilloscope:: - Megha Agrawal Ece 2 Year, Mnit JaipurShams KhanNo ratings yet
- Electrical Principles 2 (CCEET 2)Document25 pagesElectrical Principles 2 (CCEET 2)Bernard MunyithyaNo ratings yet
- Linear Variable Differential Transformer (LVDT)Document10 pagesLinear Variable Differential Transformer (LVDT)Sam WaikarNo ratings yet
- Topic 2-1f37518Document31 pagesTopic 2-1f37518norzamiraNo ratings yet
- Objective QuestionsDocument15 pagesObjective QuestionsAyyappa JavangulaNo ratings yet
- Measurement Method of Torsion and Rotation-Speed Based On 80C196KCDocument4 pagesMeasurement Method of Torsion and Rotation-Speed Based On 80C196KCSurangaGNo ratings yet
- MECA 324 Sensors & Actuators: Velocity and Acceleration SensorsDocument16 pagesMECA 324 Sensors & Actuators: Velocity and Acceleration SensorsArda GunayNo ratings yet
- Lesson 3instrumentationsystemelementsDocument21 pagesLesson 3instrumentationsystemelementsRhandel ZamoraNo ratings yet
- Theory Class - 4Document7 pagesTheory Class - 4MOUSIN PASHANo ratings yet
- CroDocument10 pagesCroSongNo ratings yet
- Control System ComponentsDocument29 pagesControl System Componentsshreemanti0% (1)
- A 10-mW Two-Channel Fully Integrated System-on-Chip For Eddy-Current Position SensingDocument10 pagesA 10-mW Two-Channel Fully Integrated System-on-Chip For Eddy-Current Position SensingkurabyqldNo ratings yet
- Vibration Sensors 2012 PDFDocument18 pagesVibration Sensors 2012 PDFRajesh Sharma100% (1)
- Complete Chapter1 and TutorialDocument19 pagesComplete Chapter1 and TutorialstevennguimsNo ratings yet
- Chapter 12Document12 pagesChapter 12bhaskarNo ratings yet
- (I) AC and DC Tachometer Generators (Ii) Drag Cup Rotor AC (Iii) Photo-Electric Tachometer (Iv) Stroboscopic MethodsDocument7 pages(I) AC and DC Tachometer Generators (Ii) Drag Cup Rotor AC (Iii) Photo-Electric Tachometer (Iv) Stroboscopic Methodsamritsaikias4No ratings yet
- Measurement of Vibration & Axial DisplacementDocument6 pagesMeasurement of Vibration & Axial DisplacementSatNo ratings yet
- Chapter 6Document13 pagesChapter 6steven pitchNo ratings yet
- Rotor Rso Reflectometer TYPE TDR100 and TDR100RBDocument38 pagesRotor Rso Reflectometer TYPE TDR100 and TDR100RBDevas ShuklaNo ratings yet
- Answer: Control System (Unit 1)Document18 pagesAnswer: Control System (Unit 1)Ajeet Kumar shuklaNo ratings yet
- Hall Effect Transducer BasicsDocument5 pagesHall Effect Transducer BasicsmandhirNo ratings yet
- Turbine Supervisory Instruments 06052014Document34 pagesTurbine Supervisory Instruments 06052014Suman GhoshNo ratings yet
- Eddy Probe System On The Basis of New Technology: FT L C L I T UDocument6 pagesEddy Probe System On The Basis of New Technology: FT L C L I T UNatthaphon NaosookNo ratings yet
- CF RT - : Monitoring of Rock Movements Using Probe Inclinometer - GuidelinesDocument10 pagesCF RT - : Monitoring of Rock Movements Using Probe Inclinometer - GuidelinesRoshanRSVNo ratings yet
- GSMDocument9 pagesGSMsuverokaNo ratings yet
- Signals FlashDocument13 pagesSignals FlashJiten ThakurNo ratings yet
- CW DrivetestDocument36 pagesCW DrivetestbousseyfNo ratings yet
- XCAP M Release Notes July 2012Document18 pagesXCAP M Release Notes July 2012Jiten ThakurNo ratings yet
- Signals FlashDocument13 pagesSignals FlashJiten ThakurNo ratings yet
- CW DrivetestDocument36 pagesCW DrivetestbousseyfNo ratings yet
- GSM Call FlowDocument4 pagesGSM Call FlowRawand100% (2)
- Xcal AutoDocument16 pagesXcal AutoAmit GurungNo ratings yet
- 45 1 1 OctoberDocument1 page45 1 1 OctoberBalvinderNo ratings yet
- Installing Windows 7: UpgradeDocument17 pagesInstalling Windows 7: UpgradeRitu RajNo ratings yet
- Drive TestingDocument14 pagesDrive TestingJiten ThakurNo ratings yet
- Acknowledgement For ReportDocument1 pageAcknowledgement For ReportJiten ThakurNo ratings yet
- Mid Term Progress Report DetailsDocument5 pagesMid Term Progress Report DetailsJiten ThakurNo ratings yet
- Application Form 2013 14 FDocument1 pageApplication Form 2013 14 FJiten ThakurNo ratings yet
- Tender Doc For TRAIhiiDocument65 pagesTender Doc For TRAIhiiJiten ThakurNo ratings yet
- 14 WcdmaDocument36 pages14 WcdmaAnonymous mnROB81No ratings yet
- 14 WcdmaDocument36 pages14 WcdmaAnonymous mnROB81No ratings yet
- Mid Term Progress Report DetailsDocument3 pagesMid Term Progress Report DetailsJiten ThakurNo ratings yet
- Application Form 2013 14 FDocument1 pageApplication Form 2013 14 FJiten ThakurNo ratings yet
- LDH Static LocatnDocument13 pagesLDH Static LocatnJiten ThakurNo ratings yet
- First and Second Generation: Justin Champion Room C208 - Tel: 3273Document25 pagesFirst and Second Generation: Justin Champion Room C208 - Tel: 3273l0rd889No ratings yet
- 3G Spectrum Auction Results - IndiaDocument7 pages3G Spectrum Auction Results - IndiaAnuj PandeyNo ratings yet
- ApplicationDocument2 pagesApplicationJiten ThakurNo ratings yet
- Detecting EEG Evoked Responses For Target Image Search With Mixed Effect ModelsDocument4 pagesDetecting EEG Evoked Responses For Target Image Search With Mixed Effect ModelsJiten ThakurNo ratings yet
- Term Paper of Digital Signal ProcessingDocument6 pagesTerm Paper of Digital Signal Processingjitenderthakur490No ratings yet
- Introduction To WL MOS SolutionDocument22 pagesIntroduction To WL MOS SolutionJiten ThakurNo ratings yet
- CCCCCCCCCCCCCCCC: CCCCC CCCCCCCCCCCCC C CDocument3 pagesCCCCCCCCCCCCCCCC: CCCCC CCCCCCCCCCCCC C CJiten ThakurNo ratings yet
- Data Structure 4Document7 pagesData Structure 4Jiten ThakurNo ratings yet
- 8051 Core SpecificationDocument55 pages8051 Core SpecificationNitheshksuvarnaNo ratings yet
- CH 6 The Quantum Mechanical Model of The Atom PDFDocument19 pagesCH 6 The Quantum Mechanical Model of The Atom PDFDave SegoviaNo ratings yet
- Ida Document D 4642 PDFDocument100 pagesIda Document D 4642 PDFMuhammad Mohsin AslamNo ratings yet
- EYEDOCS Website MCQs OpticsDocument223 pagesEYEDOCS Website MCQs OpticsAmr AbdulradiNo ratings yet
- CBSE XII Chemistry Project Spectroscopy and Its ApplicationsDocument21 pagesCBSE XII Chemistry Project Spectroscopy and Its ApplicationsRichie SinghNo ratings yet
- Week 2Document6 pagesWeek 2rrNo ratings yet
- SMK Simanggang: Physics SPM Analysis Table (By Topic)Document4 pagesSMK Simanggang: Physics SPM Analysis Table (By Topic)safrahjNo ratings yet
- Mbs99 ADocument121 pagesMbs99 AMylène RacineNo ratings yet
- CSEC Physics - Sound - SPQDocument20 pagesCSEC Physics - Sound - SPQA.BensonNo ratings yet
- Catalogue DCM PDFDocument108 pagesCatalogue DCM PDFДрагиша Небитни ТрифуновићNo ratings yet
- RGB (Used in Computer Graphics) Yiq, Yuv or Ycbcr (Used in Video Systems)Document9 pagesRGB (Used in Computer Graphics) Yiq, Yuv or Ycbcr (Used in Video Systems)Mera KaramNo ratings yet
- GW P9LR34.PM - enDocument25 pagesGW P9LR34.PM - enTaufiq ZubairiNo ratings yet
- PEE & Matter WavesDocument3 pagesPEE & Matter WavesCutest girl EVER⦑No ratings yet
- Primary, Secondary and Tertiary Colours. What Is Colour?Document4 pagesPrimary, Secondary and Tertiary Colours. What Is Colour?orionsalinasNo ratings yet
- ProPoint Vista 200W RGBW v1p7 21mar2022Document10 pagesProPoint Vista 200W RGBW v1p7 21mar2022suwono radukNo ratings yet
- Data Sheet: LED LampDocument11 pagesData Sheet: LED LampTB11SDNo ratings yet
- Introduction To Image Processing and Computer Vision 2 PDFDocument179 pagesIntroduction To Image Processing and Computer Vision 2 PDFAdane Tetemke100% (2)
- AEC F3 RigMasterDocument86 pagesAEC F3 RigMasterEloy Villca VasquezNo ratings yet
- 2nd Pre Board2017 12th ClassDocument3 pages2nd Pre Board2017 12th ClassMunir Ul Haq BabbarNo ratings yet
- Technical Insight Into Laser TrackerDocument26 pagesTechnical Insight Into Laser TrackerSuresh RajagopalNo ratings yet
- Effects of Light On Yeast Growth FDDocument17 pagesEffects of Light On Yeast Growth FDNiya Shirin0% (1)
- Colour Theory Information SheetDocument3 pagesColour Theory Information Sheetapi-335210893No ratings yet
- Sci ViveDocument461 pagesSci ViveAsphalionNo ratings yet
- 12 Std. IMPORTANT QUESTIONS & PROBLEMS - 2022 - 2023 PDFDocument16 pages12 Std. IMPORTANT QUESTIONS & PROBLEMS - 2022 - 2023 PDFUdhayaNo ratings yet
- Chapter 1 SlidesDocument6 pagesChapter 1 SlidesJohn O'BrienNo ratings yet
- Fan Indent - BHW June15Document4 pagesFan Indent - BHW June15Rajesh TipnisNo ratings yet
- Laser Surgery in Veterinary MedicineDocument389 pagesLaser Surgery in Veterinary MedicineDetian WangNo ratings yet
- Litar-Litar Kenderaan (Simulator)Document8 pagesLitar-Litar Kenderaan (Simulator)Fakhrul Helmi MieNo ratings yet