You might also like
- KT 5198aDocument5 pagesKT 5198asrinu149No ratings yet
- Control de Motor Caminadora - MC-2100Document3 pagesControl de Motor Caminadora - MC-2100redservimax33% (3)
- VICIDocument6 pagesVICIhaoNo ratings yet
- L297Document12 pagesL297wtn2013No ratings yet
- CD 00000063Document11 pagesCD 00000063api-306853111No ratings yet
- KT-5197 Serial Bipolar Stepper Motor Driver: ConnectionsDocument6 pagesKT-5197 Serial Bipolar Stepper Motor Driver: ConnectionsJenő SerkediNo ratings yet
- Anexo D-Manual BigEasyDriver PDFDocument6 pagesAnexo D-Manual BigEasyDriver PDFenmanuel316No ratings yet
- PWM Signal Converter - CaterpillarDocument4 pagesPWM Signal Converter - CaterpillarImad Hmd100% (6)
- PDFDocument4 pagesPDFssrames7282No ratings yet
- Docs Books M-2001B-IB PDFDocument130 pagesDocs Books M-2001B-IB PDFDomingo CordovaNo ratings yet
- M542Document3 pagesM542xhaneriNo ratings yet
- LM 297Document12 pagesLM 297Monika JhaNo ratings yet
- Manual/Datasheet SMC800/SMC1500Document20 pagesManual/Datasheet SMC800/SMC1500smc800No ratings yet
- TECO E510 Inverter. Quick Start Guide. Step 1. Supply & Motor ConnectionDocument9 pagesTECO E510 Inverter. Quick Start Guide. Step 1. Supply & Motor Connectionتكنو ليفتNo ratings yet
- Emko ATS10 Eng Short v00 PDFDocument6 pagesEmko ATS10 Eng Short v00 PDFCarmen Serbanoiu33% (3)
- PID Temp. ControllerDocument8 pagesPID Temp. ControllerHowardgfNo ratings yet
- WorkingDocument3 pagesWorkingAnuj TripathiNo ratings yet
- Variador Yanwa AcerosDocument9 pagesVariador Yanwa Acerosjuan Carlos GonzalezNo ratings yet
- Railway Accident Monitoring System: A Project Report ONDocument13 pagesRailway Accident Monitoring System: A Project Report ONPrateek SrivastavNo ratings yet
- HDC24xx Datasheet RoboteqDocument13 pagesHDC24xx Datasheet Roboteqluismena09051982No ratings yet
- DeviceCraftDCmotorController 1015BDocument24 pagesDeviceCraftDCmotorController 1015BbetortitaNo ratings yet
- Stepper Motor Controllers: DescriptionDocument12 pagesStepper Motor Controllers: DescriptionGigi TyireanNo ratings yet
- ECO-MPU Application GuideDocument23 pagesECO-MPU Application GuideAssir El DjazairiNo ratings yet
- Raychem Instruction ManualDocument17 pagesRaychem Instruction ManualjaikolangaraparambilNo ratings yet
- TB6560 3axis DriverDocument11 pagesTB6560 3axis DriverPHQ1910No ratings yet
- LMD 18200Document14 pagesLMD 18200Itzamary Romero SosaNo ratings yet
- HY-DIV168N-3.5A Two Phase Hybrid Stepper Motor Drive ManualDocument5 pagesHY-DIV168N-3.5A Two Phase Hybrid Stepper Motor Drive ManualP B100% (1)
- GE2011 IbDocument152 pagesGE2011 IbEsteban SosaNo ratings yet
- FX2N 2adDocument8 pagesFX2N 2adpublicdomain197No ratings yet
- I-Monitor Motor Controller Manual Rev 7 6Document72 pagesI-Monitor Motor Controller Manual Rev 7 6elch310scridbNo ratings yet
- ECE 8830 - Electric Drives: Topic 16: Control of SPM Synchronous Motor DrivesDocument59 pagesECE 8830 - Electric Drives: Topic 16: Control of SPM Synchronous Motor DrivesHassan SouleymanNo ratings yet
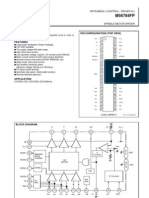
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocument11 pagesMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoNo ratings yet
- MD2278 Microstepping Driver SpecsDocument3 pagesMD2278 Microstepping Driver Specshoangmanh1989No ratings yet
- DC/DC Converter Operation GuideDocument6 pagesDC/DC Converter Operation GuidesaeidraminaNo ratings yet
- Instruction and Service Manual Adjustable Frequency Crane ControlDocument9 pagesInstruction and Service Manual Adjustable Frequency Crane ControlJoss Maykol Mundaca VasquezNo ratings yet
- KT60KM06Document2 pagesKT60KM06Luciano DiasNo ratings yet
- 25 A 20Document9 pages25 A 20s_barriosNo ratings yet
- Manual Version 3.4Document8 pagesManual Version 3.4pjvansandwykNo ratings yet
- Calibrate 175-4998 Signal ConverterDocument5 pagesCalibrate 175-4998 Signal ConverterImad Hmd75% (4)
- Teco E510 Quick Start Guide en v1Document8 pagesTeco E510 Quick Start Guide en v1Fabian Vazquez OrtegaNo ratings yet
- 2008 Chevrolet HHR DTCDocument6 pages2008 Chevrolet HHR DTCTal Benyamin100% (1)
- MC 60modcolletionDocument3 pagesMC 60modcolletiontuzumkuru100% (3)
- JKBLD750 ManualDocument15 pagesJKBLD750 Manualvicuaduoc1No ratings yet
- Manual & Installation Instructions For Model Wzm-240 Translator DriveDocument39 pagesManual & Installation Instructions For Model Wzm-240 Translator Drivecristian ruizNo ratings yet
- Manual & Installation Instructions For Model Wzm-240 Translator DriveDocument39 pagesManual & Installation Instructions For Model Wzm-240 Translator DriveomarNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- No+bake+ing +vol+iiDocument132 pagesNo+bake+ing +vol+iiEugeny TikhomirovNo ratings yet
- Spreadsheet Practice Exercises-2017Document43 pagesSpreadsheet Practice Exercises-2017Sur Velan100% (1)
- Kollmorgen S300 Servo Drive ManualDocument134 pagesKollmorgen S300 Servo Drive ManualCarlos SalazarNo ratings yet
- B. Glo Bal Maxima/MinimaDocument15 pagesB. Glo Bal Maxima/MinimalucasNo ratings yet
- B.Tech (ECE) Course Scheme & Syllabus as per CBCSDocument168 pagesB.Tech (ECE) Course Scheme & Syllabus as per CBCSRatsihNo ratings yet
- Ambiguity in Legal Translation: Salah Bouregbi Badji Mokhtar University Annaba - Algeria - Salihbourg@Document14 pagesAmbiguity in Legal Translation: Salah Bouregbi Badji Mokhtar University Annaba - Algeria - Salihbourg@MerHamNo ratings yet
- Candidate Workshop ManualDocument45 pagesCandidate Workshop ManualMark Brewer100% (1)
- SMD - Metal-Sheet Decking DesignDocument10 pagesSMD - Metal-Sheet Decking DesignAchilles YipNo ratings yet
- 16656561931665656193FinancialModellingProfessional 1 (1) CompressedDocument17 pages16656561931665656193FinancialModellingProfessional 1 (1) CompressedDharmik UndaviyaNo ratings yet
- P90X2 Les Mills PUMP HybridDocument7 pagesP90X2 Les Mills PUMP HybridRamonBeltranNo ratings yet
- Trends in Maternal Mortality: Executive SummaryDocument16 pagesTrends in Maternal Mortality: Executive SummarykansaNo ratings yet
- MSC - Nastran 2014 Linear Static Analysis User's Guide PDFDocument762 pagesMSC - Nastran 2014 Linear Static Analysis User's Guide PDFFeiNo ratings yet
- Prof. Hanumant Pawar: GeomorphologyDocument15 pagesProf. Hanumant Pawar: GeomorphologySHAIK CHAND PASHANo ratings yet
- Full Download Agriscience Fundamentals and Applications 6th Edition Burton Solutions ManualDocument36 pagesFull Download Agriscience Fundamentals and Applications 6th Edition Burton Solutions ManualzickshannenukusNo ratings yet
- Performance Analysis of Wallace Tree Multiplier With Kogge Stone Adder Using 15-4 CompressorDocument5 pagesPerformance Analysis of Wallace Tree Multiplier With Kogge Stone Adder Using 15-4 Compressoranil kumarNo ratings yet
- TH - TB Series (Helical GearBox Catalog)Document94 pagesTH - TB Series (Helical GearBox Catalog)poorianaNo ratings yet
- The Nigerian Marketing System Its Development - Problems and ProspectsDocument8 pagesThe Nigerian Marketing System Its Development - Problems and ProspectsNwakor Maco Sochi100% (1)
- Evaluation of Earthquake-Induced Cracking of Embankment DamsDocument21 pagesEvaluation of Earthquake-Induced Cracking of Embankment DamsMARCOS ABRAHAM ALEJANDRO BALDOCEDA HUAYASNo ratings yet
- Concrete Strength Tester Water-Cement RatioDocument50 pagesConcrete Strength Tester Water-Cement RatioBartoFreitasNo ratings yet
- Coursebook 1Document84 pagesCoursebook 1houetofirmin2021No ratings yet
- Warehouse Processes/OperationsDocument4 pagesWarehouse Processes/OperationsNhsyyNo ratings yet
- Happier at Home by Gretchen Rubin - ExcerptDocument39 pagesHappier at Home by Gretchen Rubin - ExcerptCrown Publishing Group69% (16)
- 01 LANG Forgiarini Low Energy EmulsificationDocument8 pages01 LANG Forgiarini Low Energy EmulsificationDuvánE.DueñasLópezNo ratings yet
- Assignment 5: Engineering Utilities IiDocument4 pagesAssignment 5: Engineering Utilities IiRex SabersonNo ratings yet
- Bharat Gaurav Deluxe AC tourist train to showcase Gujarat's cultureDocument146 pagesBharat Gaurav Deluxe AC tourist train to showcase Gujarat's culturesandeep kumarNo ratings yet
- A Knowledge Management Approach To Organizational Competitive Advantage Evidence From The Food SectorDocument13 pagesA Knowledge Management Approach To Organizational Competitive Advantage Evidence From The Food SectorJack WenNo ratings yet
- Risktec Drilling Soc 0.3 PDFDocument16 pagesRisktec Drilling Soc 0.3 PDF1sNo ratings yet
- Perpus Pusat Bab 1 Dan 2Document62 pagesPerpus Pusat Bab 1 Dan 2imam rafifNo ratings yet
- Crown Platform Crown Battery Operated Pallet TruckDocument7 pagesCrown Platform Crown Battery Operated Pallet Truckgaurav champawatNo ratings yet
- Cars and Trucks With Mitsubishi TD04 TurbochargerDocument17 pagesCars and Trucks With Mitsubishi TD04 TurbochargersampapaNo ratings yet