You might also like
- United under SAP: The process of eliminating information islands for ThyssenKrupp in China (Zhongshan)From EverandUnited under SAP: The process of eliminating information islands for ThyssenKrupp in China (Zhongshan)No ratings yet
- Service Manual Operation Audio Visual BasicsDocument9 pagesService Manual Operation Audio Visual Basicsnorman100% (45)
- PIC Microcontroller Projects in C: Basic to AdvancedFrom EverandPIC Microcontroller Projects in C: Basic to AdvancedRating: 5 out of 5 stars5/5 (10)
- TTC 1000 Manual OldDocument96 pagesTTC 1000 Manual OldsvismaelNo ratings yet
- HP Color Laserjet M251 (Repair Manual) PDFDocument112 pagesHP Color Laserjet M251 (Repair Manual) PDFBong ManuelNo ratings yet
- DP2K S Series Service PDFDocument307 pagesDP2K S Series Service PDFMarc Antony75% (4)
- Manual Compressor GA11+Document92 pagesManual Compressor GA11+Ahmad DagamsehNo ratings yet
- Zelio Logic 2 Smart Relay User ManualDocument192 pagesZelio Logic 2 Smart Relay User ManualLambert G. RequinaNo ratings yet
- PowerPoint 2016 Step-by-Step Guide PDFDocument85 pagesPowerPoint 2016 Step-by-Step Guide PDFbarkhawanNo ratings yet
- Benq MP612C PDFDocument64 pagesBenq MP612C PDFmiguel angel jaramilloNo ratings yet
- Audio DVD Avx Aacp ViosDocument100 pagesAudio DVD Avx Aacp ViosKooganeswaran AarumugamNo ratings yet
- UsersGuide 900 Series 2Document203 pagesUsersGuide 900 Series 2Jesse QuaedackersNo ratings yet
- Xdpmanual EngDocument653 pagesXdpmanual EngTrungNo ratings yet
- Owner's ManualDocument208 pagesOwner's ManualChantal LilouNo ratings yet
- NUUO Surveillance System Manual PDFDocument134 pagesNUUO Surveillance System Manual PDFFERNANDO ANDRIOTTI VICENTINNo ratings yet
- Datavideo CG 100Document130 pagesDatavideo CG 100Daniel SevillaNo ratings yet
- Aeq Capitol Ip Users ManualDocument109 pagesAeq Capitol Ip Users ManualahoubaNo ratings yet
- E7169 Emanual X301A Z104Document122 pagesE7169 Emanual X301A Z104johnmcrty.013No ratings yet
- 23epson L250FSeriesUsersGuideDocument247 pages23epson L250FSeriesUsersGuideterNo ratings yet
- Zelio Logic ManualDocument196 pagesZelio Logic Manualdimpex_01No ratings yet
- TAURUS MH User Manual 40-400 Modular 480v UPSDocument110 pagesTAURUS MH User Manual 40-400 Modular 480v UPSEu RiveroNo ratings yet
- EcoStruxure Hybrid DCS Process Control Services User Guide - Eng - EIO0000000988.14Document616 pagesEcoStruxure Hybrid DCS Process Control Services User Guide - Eng - EIO0000000988.14João Carlos AlmeidaNo ratings yet
- PLUSIVO Guide EnglishDocument151 pagesPLUSIVO Guide EnglishSiio Pacilea50% (2)
- Manual SSU2000e RevH User GuideDocument314 pagesManual SSU2000e RevH User Guideالعربي قاسميNo ratings yet
- Controller Editor Manual EnglishDocument89 pagesController Editor Manual EnglishPete ArnoldNo ratings yet
- VIP-PLANOPT 18 User's ManualDocument70 pagesVIP-PLANOPT 18 User's ManualMuhammad Alvian Faghlefi100% (2)
- Panasonic PT-VZ585N, PT-VW545N, PT-VX615N ManualDocument173 pagesPanasonic PT-VZ585N, PT-VW545N, PT-VX615N ManualdieubimatNo ratings yet
- Marantz Ud7007 Service enDocument95 pagesMarantz Ud7007 Service enbetmenn45No ratings yet
- Operating Manual Self Service SystemsDocument338 pagesOperating Manual Self Service SystemsThomas AvalaNo ratings yet
- C3D Guide 2023 SunethDocument97 pagesC3D Guide 2023 SunethSuneth Thushara100% (2)
- MpcSoftwareManual PDFDocument272 pagesMpcSoftwareManual PDFBenjamin GodoyNo ratings yet
- SSU GuideDocument470 pagesSSU GuidehizkiaysNo ratings yet
- MPC X-MPCLive-MPCLiveII-MPCOne-MPCTouch-MPCStudio-UserGuide-v2.10.1Document456 pagesMPC X-MPCLive-MPCLiveII-MPCOne-MPCTouch-MPCStudio-UserGuide-v2.10.1William WankerNo ratings yet
- MNU-1651-51 (x51121 - E)Document264 pagesMNU-1651-51 (x51121 - E)HoppeHNo ratings yet
- Owner'S Manual EnglishDocument76 pagesOwner'S Manual EnglishAlessandroNo ratings yet
- M750 SMDocument678 pagesM750 SMkostas_sanNo ratings yet
- Pipesim User GuideDocument843 pagesPipesim User GuideJesus Guxman100% (4)
- Simuaid: Charles H. Roth, JRDocument60 pagesSimuaid: Charles H. Roth, JRBRAHMA REDDY AAKUMAIIANo ratings yet
- HP Color LaserJet Pro 200 M276 MFP Service ManualDocument130 pagesHP Color LaserJet Pro 200 M276 MFP Service ManualDisoft Sas CúcutaNo ratings yet
- Rts-820 Series User ManualDocument183 pagesRts-820 Series User ManualJhon Jairo Erazo100% (3)
- Laptop Performance in Electro Acoustic MusicDocument98 pagesLaptop Performance in Electro Acoustic MusicnachothefreeloaderNo ratings yet
- B5a 1596 10Document80 pagesB5a 1596 10Kamil PaluchNo ratings yet
- Yamaha RXV379 Owners ManualDocument78 pagesYamaha RXV379 Owners ManualjoecarrNo ratings yet
- X-Station User Guide - EnglishDocument65 pagesX-Station User Guide - Englishe_gatomaloNo ratings yet
- MDLDENDocument49 pagesMDLDENDonaireNo ratings yet
- VI-2000MK-II: CourseDocument125 pagesVI-2000MK-II: CourseRafael HernandezNo ratings yet
- TL1 Ssu200 PDFDocument494 pagesTL1 Ssu200 PDFX19_fredNo ratings yet
- Vj626ufe A 05 1Document144 pagesVj626ufe A 05 1fabrizzio carliNo ratings yet
- Kodak Ektapro Manual de InstruccionesDocument77 pagesKodak Ektapro Manual de InstruccionesMauricio FreyreNo ratings yet
- Camio 8.4 SP1 Basic Training GuideDocument354 pagesCamio 8.4 SP1 Basic Training GuideJustformedia Justformedia100% (10)
- Mu 399004Document319 pagesMu 399004Douglas Vinicius da SilvaNo ratings yet
- Barco UserGuide K5902088 03 User-Guide-MDSC-8258Document44 pagesBarco UserGuide K5902088 03 User-Guide-MDSC-8258Dincer DemiragNo ratings yet
- SOLIDserver Administrator Guide 5.0.3Document1,041 pagesSOLIDserver Administrator Guide 5.0.3proutNo ratings yet
- Operator's Manual: Line Distance Protection IED REL 670Document120 pagesOperator's Manual: Line Distance Protection IED REL 670Binh LyNo ratings yet
- INSTRUMENTATION DRAWINGS - Gamtekmhs PDFDocument106 pagesINSTRUMENTATION DRAWINGS - Gamtekmhs PDFokta100% (2)
- VS7000 UserManual v02.11 EdDDocument276 pagesVS7000 UserManual v02.11 EdDAlejandro GomezNo ratings yet
- 33003788K01000 PDFDocument472 pages33003788K01000 PDFAji SukumaNo ratings yet
- Acat Developers Guide 0Document112 pagesAcat Developers Guide 0Akshar GandhiNo ratings yet
- R1-1 - Color CodeDocument1 pageR1-1 - Color Codeياسين حسينNo ratings yet
- Fiber SeparationDocument1 pageFiber Separationياسين حسينNo ratings yet
- OptimDocument45 pagesOptimSRI WALUYONo ratings yet
- R1-2 - Color CodeDocument1 pageR1-2 - Color Codeياسين حسينNo ratings yet
- Filling Ratio CalculationDocument1 pageFilling Ratio Calculationياسين حسينNo ratings yet
- Comc Bae Fiber Excellence Seminar Networkiq VersionDocument127 pagesComc Bae Fiber Excellence Seminar Networkiq Versionياسين حسينNo ratings yet
- Core Alignment Fusion Splicer 90S: Instruction ManualDocument101 pagesCore Alignment Fusion Splicer 90S: Instruction Manualياسين حسينNo ratings yet
- Working With The Visio MethodologyDocument6 pagesWorking With The Visio Methodologyياسين حسينNo ratings yet
- Loss CalculationDocument131 pagesLoss Calculationياسين حسينNo ratings yet
- PD358934Document3 pagesPD358934ياسين حسينNo ratings yet
- 1Document1 page1ياسين حسينNo ratings yet
- Certi Fiber Pro Optical Loss Test Set UmDocument150 pagesCerti Fiber Pro Optical Loss Test Set Umياسين حسينNo ratings yet
- NPI Fiber Pocket Guide - FINAL - PRINTDocument16 pagesNPI Fiber Pocket Guide - FINAL - PRINTياسين حسينNo ratings yet
- Visio Shapes Invisible But Still PrintDocument3 pagesVisio Shapes Invisible But Still Printياسين حسينNo ratings yet
- OTDR Standard Measurment ModeDocument100 pagesOTDR Standard Measurment Modeياسين حسينNo ratings yet
- Ultracell UL18 12 CompaniesDocument2 pagesUltracell UL18 12 Companiesياسين حسينNo ratings yet
- Vissem - Opticube ClosureDocument1 pageVissem - Opticube Closureياسين حسينNo ratings yet
- Systimax® Imvision® Controller X User GuideDocument30 pagesSystimax® Imvision® Controller X User Guideياسين حسينNo ratings yet
- Product SpecificationsDocument4 pagesProduct Specificationsياسين حسينNo ratings yet
- 4 Core Cu UnarmdDocument1 page4 Core Cu UnarmdSasi Kiran VundamatlaNo ratings yet
- MSK 002Document4 pagesMSK 002ياسين حسينNo ratings yet
- Motor Selection PDFDocument9 pagesMotor Selection PDFياسين حسينNo ratings yet
- Calculating Fiber Loss and DistanceDocument4 pagesCalculating Fiber Loss and DistanceroomforsquaresNo ratings yet
- MCC PanelDocument1 pageMCC Panelياسين حسينNo ratings yet
- Arabic BmsDocument38 pagesArabic Bmsياسين حسين100% (1)
- Questions & Answers - LED Lighting: What Are LED Bulbs?Document3 pagesQuestions & Answers - LED Lighting: What Are LED Bulbs?ياسين حسينNo ratings yet
- LED Vs Fluorescent PerformanceDocument2 pagesLED Vs Fluorescent Performancejieon2002No ratings yet
- اتخاذ القرارDocument23 pagesاتخاذ القرارKmafh MohammedNo ratings yet
- قواعد الأفعال VerbsDocument38 pagesقواعد الأفعال Verbsshare2peopleNo ratings yet
- Battery ChargerDocument16 pagesBattery Chargerياسين حسينNo ratings yet
- Industrial Motherboards 012015Document60 pagesIndustrial Motherboards 012015zoleNo ratings yet
- PLDTUTORDocument13 pagesPLDTUTORAjay Nath S ANo ratings yet
- CMOS DesignDocument8 pagesCMOS DesignAnand AmrutNo ratings yet
- Electronic Voting MachineDocument70 pagesElectronic Voting MachineSalman Naveed67% (3)
- Em 100Document8 pagesEm 100Carlos WillamsNo ratings yet
- Electrical Engineering Hand BookDocument22 pagesElectrical Engineering Hand Bookjicksonjohn100% (1)
- Birla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionDocument3 pagesBirla Institute of Technology and Science, Pilani: Pilani Campus AUGS/ AGSR DivisionASHLESHA KUMARNo ratings yet
- PIC18F2455/2550/4455/4550 Data SheetDocument110 pagesPIC18F2455/2550/4455/4550 Data Sheetmiguel lopezNo ratings yet
- DiDocument5 pagesDiadrianocpoli4090100% (1)
- Labview Serial CommunicationDocument0 pagesLabview Serial Communicationmajidkhan04No ratings yet
- 1K/2K/4K 2.5V Microwire Serial EEPROM: Features: Package TypesDocument20 pages1K/2K/4K 2.5V Microwire Serial EEPROM: Features: Package TypesJoão PauloNo ratings yet
- 20EC01016 Lab2Document10 pages20EC01016 Lab2Speed SystemNo ratings yet
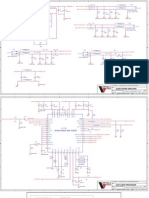
- Vertex 2 Pro SchematicsDocument38 pagesVertex 2 Pro SchematicsSyed Hassan Raza Naqvi100% (1)
- Tabela de Chips BoschDocument4 pagesTabela de Chips BoschDanny EversonNo ratings yet
- Openedge Platform: Wiwynn Ep100 SeriesDocument2 pagesOpenedge Platform: Wiwynn Ep100 SeriesHimanshu GondNo ratings yet
- SRAM ArchitectureDocument35 pagesSRAM ArchitectureDr-Irfan Ahmad PindooNo ratings yet
- Microcontrollers & Applications QBDocument7 pagesMicrocontrollers & Applications QBKeerthe VaasanNo ratings yet
- DX DiagDocument35 pagesDX DiagAchmad Zakaria AzharNo ratings yet
- Computer Organization and Assembly Language: Course ContentDocument1 pageComputer Organization and Assembly Language: Course Contentafx nadeemNo ratings yet
- Ug471 7series SelectIO PDFDocument188 pagesUg471 7series SelectIO PDFDlishaNo ratings yet
- DP Video Intel-NT 16045 DriversDocument96 pagesDP Video Intel-NT 16045 DriversAri Tohari100% (2)
- Testing and Troubleshooting 2Document4 pagesTesting and Troubleshooting 2Ian Neil LaenoNo ratings yet
- ESC - Center - Board: Flight - Controller - Board IMU - Board GPS - BoardDocument24 pagesESC - Center - Board: Flight - Controller - Board IMU - Board GPS - Boardmartinez_cvmNo ratings yet
- PIC18 Pulse Width ModulationDocument16 pagesPIC18 Pulse Width ModulationAnoj Pahathkumbura100% (1)
- FChapter 9 - Memory Design in 68KDesignDocument22 pagesFChapter 9 - Memory Design in 68KDesignShashitharan PonnambalanNo ratings yet
- Driver Mosfet TC4425Document18 pagesDriver Mosfet TC4425jaimeNo ratings yet
- Physic Project: Name: Sohan Ajay Vernekar 12 B Euro SchoolDocument25 pagesPhysic Project: Name: Sohan Ajay Vernekar 12 B Euro School[VȺM๖ۣۜƤI๖ۣۜRE COB๖ۣۜRȺ]No ratings yet
- CH 13 Floor PlanDocument53 pagesCH 13 Floor Planvenkata satya challayya naidu PragadaNo ratings yet
- Silego SLG8LP465 PLL DatasheetDocument27 pagesSilego SLG8LP465 PLL DatasheetewolwentaNo ratings yet
- ASIC-System On Chip-VLSI Design Backend (Physical Design) Interview Questions and AnswersDocument7 pagesASIC-System On Chip-VLSI Design Backend (Physical Design) Interview Questions and AnswersRohith RajNo ratings yet