You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- REF Stabilizing Resistor CalculationsDocument8 pagesREF Stabilizing Resistor CalculationsmaheshNo ratings yet
- Human Auditory System Response To Modulated Electromagnetic EnergyDocument4 pagesHuman Auditory System Response To Modulated Electromagnetic EnergyChris HardingNo ratings yet
- Radar Vs Stealth - Passive Radar & FutureDocument8 pagesRadar Vs Stealth - Passive Radar & Futurelynx437No ratings yet
- Design of Riprap RevetmentDocument193 pagesDesign of Riprap RevetmentFrancis Domingo100% (1)
- 1224fabric Dust CollectorsDocument2 pages1224fabric Dust Collectorsrmm99rmm99No ratings yet
- OpenFX TutorialsDocument59 pagesOpenFX Tutorialsrmm99rmm99No ratings yet
- PDMS Vs SmartPlantDocument24 pagesPDMS Vs SmartPlantrmm99rmm990% (1)
- 1223electrostatic PrecipitatorsDocument6 pages1223electrostatic Precipitatorsrmm99rmm99No ratings yet
- Ash and Slag Handling SystemsDocument3 pagesAsh and Slag Handling Systemsrmm99rmm99No ratings yet
- 3229environmentally Sound Ash Handling Technologies. Case StudyDocument4 pages3229environmentally Sound Ash Handling Technologies. Case Studyrmm99rmm99100% (1)
- Design of Riprap RevetmentDocument193 pagesDesign of Riprap RevetmentFrancis Domingo100% (1)
- Slope Deflection MethodDocument87 pagesSlope Deflection MethodFian ArdiyanaNo ratings yet
- Radar Level Measurement in Industrial TanksDocument3 pagesRadar Level Measurement in Industrial Tanksrmm99rmm99No ratings yet
- Ash and Slag Handling SystemsDocument3 pagesAsh and Slag Handling Systemsrmm99rmm99No ratings yet
- Fly ash scrubbers with Venturi coagulatorDocument1 pageFly ash scrubbers with Venturi coagulatorrmm99rmm99No ratings yet
- 3228estimation of Erosion in Pipelines at Pneumatic Conveying of Fine Bulk MaterialsDocument4 pages3228estimation of Erosion in Pipelines at Pneumatic Conveying of Fine Bulk Materialsrmm99rmm99No ratings yet
- 3228estimation of Erosion in Pipelines at Pneumatic Conveying of Fine Bulk MaterialsDocument4 pages3228estimation of Erosion in Pipelines at Pneumatic Conveying of Fine Bulk Materialsrmm99rmm99No ratings yet
- 3223some Issues of Optimizing The Schemes of Pneumatic Ash Removal Systems of Thermal Power PlantsDocument6 pages3223some Issues of Optimizing The Schemes of Pneumatic Ash Removal Systems of Thermal Power Plantsrmm99rmm99No ratings yet
- 3222experience of Implementing Clyde Bergemann Technologies of Ash RemovalDocument3 pages3222experience of Implementing Clyde Bergemann Technologies of Ash Removalrmm99rmm99No ratings yet
- 841methods of Small HPPs ConstructionDocument1 page841methods of Small HPPs Constructionrmm99rmm99No ratings yet
- 3221technological Options For Removal of Fly Ash at TPPs in IndiaDocument4 pages3221technological Options For Removal of Fly Ash at TPPs in Indiarmm99rmm99100% (1)
- 321brief Characteristics of Traditional Ash and Slag Removal Systems of The Russian TPPsDocument4 pages321brief Characteristics of Traditional Ash and Slag Removal Systems of The Russian TPPsrmm99rmm99No ratings yet
- 321brief Characteristics of Traditional Ash and Slag Removal Systems of The Russian TPPsDocument4 pages321brief Characteristics of Traditional Ash and Slag Removal Systems of The Russian TPPsrmm99rmm99No ratings yet
- 843operation of Small and MicroHPPsDocument1 page843operation of Small and MicroHPPsrmm99rmm99No ratings yet
- 1221inertial Ash CollectorsDocument1 page1221inertial Ash Collectorsrmm99rmm99No ratings yet
- 842hydroturbine EquipmentDocument1 page842hydroturbine Equipmentrmm99rmm99No ratings yet
- 311list of Coal-Fired TPPs and Boiler-HousesDocument6 pages311list of Coal-Fired TPPs and Boiler-Housesrmm99rmm99No ratings yet
- Pressure Part Replacement In-Kind, Upgrade, Redesign: "What Are Your Options and How Do You Make The Right Decision?"Document18 pagesPressure Part Replacement In-Kind, Upgrade, Redesign: "What Are Your Options and How Do You Make The Right Decision?"rmm99rmm99100% (1)
- RPI TP 0200 v1 2007Document17 pagesRPI TP 0200 v1 2007rmm99rmm99100% (1)
- RPI TP 0192 v1 2005Document24 pagesRPI TP 0192 v1 2005rmm99rmm99No ratings yet
- RPI TP 0087 v1 1990Document13 pagesRPI TP 0087 v1 1990rmm99rmm99No ratings yet
- RPI TP 0184 v1 2003Document7 pagesRPI TP 0184 v1 2003rmm99rmm99No ratings yet
- Steam Generator Design Options for Supercritical Coal PlantsDocument6 pagesSteam Generator Design Options for Supercritical Coal Plantsank_mehra100% (1)
- Digital Logic Design: Multiplexer & De-MultiplexerDocument26 pagesDigital Logic Design: Multiplexer & De-MultiplexerMd AshiqNo ratings yet
- Laplace Network 2Document21 pagesLaplace Network 2Apaar GuptaNo ratings yet
- BARTEC PIXAVI Gravity X Intrinsically Safe CameraDocument3 pagesBARTEC PIXAVI Gravity X Intrinsically Safe CameraPedroNo ratings yet
- UMG8900 Installation Manual-Hardware InstallationDocument209 pagesUMG8900 Installation Manual-Hardware Installationdleal2009100% (1)
- K3HB Communication User ManualDocument136 pagesK3HB Communication User ManualFauzan IsmailNo ratings yet
- NEET 2023 Set-E5 Answer KeyDocument29 pagesNEET 2023 Set-E5 Answer KeyChristopher NolanNo ratings yet
- Manual Rele SickDocument6 pagesManual Rele SickElian SilvaNo ratings yet
- ProductData en De-01Document1 pageProductData en De-01publicdomainNo ratings yet
- TR-808 Snare DIY perfboard layout <40Document12 pagesTR-808 Snare DIY perfboard layout <40dse666No ratings yet
- CH 2 Essential Chemistry For BiologyDocument53 pagesCH 2 Essential Chemistry For BiologyStalyn Tejada HernandezNo ratings yet
- Fiat Barchetta: EngineDocument20 pagesFiat Barchetta: EngineHallex OliveiraNo ratings yet
- Emf Equation of AlternatorDocument2 pagesEmf Equation of AlternatorThe Engineers EDGE, CoimbatoreNo ratings yet
- 22.IGBT Based Close Loop Speed Control of Universal MotorDocument3 pages22.IGBT Based Close Loop Speed Control of Universal MotorANAND KRISHNANNo ratings yet
- Pic 01 INTRO PDFDocument29 pagesPic 01 INTRO PDFChintan Shah100% (1)
- Rem Control PM500 PDFDocument18 pagesRem Control PM500 PDFraripaunescuNo ratings yet
- Simulation Activity 1 DSBFC and DSBSCDocument6 pagesSimulation Activity 1 DSBFC and DSBSCDennis ANo ratings yet
- Moxa Eds P206a Series Datasheet v1.0Document5 pagesMoxa Eds P206a Series Datasheet v1.0Fernando Cabrera MichelNo ratings yet
- Litz Wire Termination GuideDocument5 pagesLitz Wire Termination GuidefdNo ratings yet
- Active Infrared Motion Detector Security SystemDocument24 pagesActive Infrared Motion Detector Security SystemIsuru Chamath Hettiarachchi100% (1)
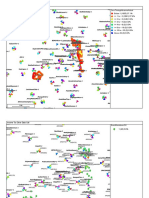
- 2G Drive Test Plot - Sites Serving IT DeptDocument4 pages2G Drive Test Plot - Sites Serving IT DeptRavi ShuklaNo ratings yet
- Jenway 7200 7205 Product Brochure 2017Document8 pagesJenway 7200 7205 Product Brochure 2017ADRIANA DE JESUS ARGUELLES FLORESNo ratings yet
- InteliDrive IPC DatasheetDocument4 pagesInteliDrive IPC DatasheetMuhammad Shoaib HussainNo ratings yet
- Inside A DELL D610 Battery ..Document5 pagesInside A DELL D610 Battery ..Srdjan BNo ratings yet
- A Simplified Broadband Design Methodology For Linearized High-Efficiency Continuous Class-F Power AmplifiersDocument12 pagesA Simplified Broadband Design Methodology For Linearized High-Efficiency Continuous Class-F Power AmplifiersG H Raisoni College of Engineering NagpurNo ratings yet
- CH 2 (Support) Power Supply CircuitsDocument30 pagesCH 2 (Support) Power Supply CircuitsFazreen Ahmad FuziNo ratings yet
- Product Cataloge PDFDocument20 pagesProduct Cataloge PDFUmair MughalNo ratings yet
- Ds Parani Sd1000Document2 pagesDs Parani Sd1000crystalng5259No ratings yet