You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 90 DEGREE's CAR PARKING SYSTEMDocument10 pages90 DEGREE's CAR PARKING SYSTEMIet Trichy100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Automatic Gear Changer Using Two Wheeler Speed ChangerDocument16 pagesAutomatic Gear Changer Using Two Wheeler Speed ChangerIet TrichyNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- EmbeddedDocument18 pagesEmbeddedIet TrichyNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- EmbeddedDocument18 pagesEmbeddedIet TrichyNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Automatic Head Light Control SystemDocument1 pageAutomatic Head Light Control SystemIet TrichyNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Intelligent Automatic Plant Irrigation SystemDocument5 pagesIntelligent Automatic Plant Irrigation SystemIet TrichyNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Human Detector Using Pir SensorDocument15 pagesHuman Detector Using Pir SensorIet Trichy50% (2)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
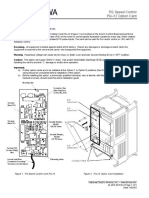
- PLC Based Speed ControlDocument5 pagesPLC Based Speed ControlIet TrichyNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Voltage Drop ControlDocument10 pagesVoltage Drop ControlIet TrichyNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- 730 - Sri Ramakrishna Polytechnic College: NH - 45, PerambalurDocument3 pages730 - Sri Ramakrishna Polytechnic College: NH - 45, PerambalurIet TrichyNo ratings yet
- 610 Offshore Generation Cable Connections (2015)Document180 pages610 Offshore Generation Cable Connections (2015)Nam Hoai Le100% (1)
- Converting Watts & Amps To 12V Run TimesDocument2 pagesConverting Watts & Amps To 12V Run TimesWaqar AhmedNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Conceptual Questions: Problem Set 1: Electric Forces and FieldsDocument5 pagesConceptual Questions: Problem Set 1: Electric Forces and FieldsretterateNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- CS3448 BOM - Parts List for CS3000/4000/4080 SchematicDocument7 pagesCS3448 BOM - Parts List for CS3000/4000/4080 SchematicJohnny Tenezaca DuarteNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Freesmachine Falcon HandleidingDocument198 pagesFreesmachine Falcon Handleidingmad zollaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- WEG Synchronous Alternators G Plus and Ag10 Line North America 50074626 Brochure EnglishDocument48 pagesWEG Synchronous Alternators G Plus and Ag10 Line North America 50074626 Brochure Englishbayu dewantoNo ratings yet
- Substation Protection Tests at Gagan FerrotechDocument3 pagesSubstation Protection Tests at Gagan FerrotechElectro Allied Engineering ServicesNo ratings yet
- Op 1Document9 pagesOp 1Gary Shiomi Api BatteryNo ratings yet
- Phase Control Using SCR SDocument8 pagesPhase Control Using SCR StekellamerZ aka tekellamerNo ratings yet
- Parker Electrohydraulic Motion Controls - HY14-2550 PDFDocument415 pagesParker Electrohydraulic Motion Controls - HY14-2550 PDFROI MADE SASNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Applications of First Order ODE Word ProblemsDocument36 pagesApplications of First Order ODE Word Problemsgreg hansNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Bravo: He Small Pump Package With Big FeaturesDocument5 pagesBravo: He Small Pump Package With Big Featuresvibin globalNo ratings yet
- Voltage Control of InvertersDocument38 pagesVoltage Control of InvertersSindhujaSindhu100% (3)
- Mathcad - 110 V Charger Diode DeterminationDocument3 pagesMathcad - 110 V Charger Diode DeterminationAILEENNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- PARTS CATALOGDocument238 pagesPARTS CATALOGmichael ourdanNo ratings yet
- Group 15 Fuel Warmer System Specs and OperationDocument1 pageGroup 15 Fuel Warmer System Specs and OperationDavidNo ratings yet
- PGX2 IngDocument5 pagesPGX2 IngpiabNo ratings yet
- JBL Manual - Northridge E150PDocument8 pagesJBL Manual - Northridge E150PionelflorinelNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Cncvietpro DDCS V3.1Document44 pagesCncvietpro DDCS V3.1Anderson Azevedo TorresNo ratings yet
- System Diagram: Body Electrical - Air Conditioner BE-31Document1 pageSystem Diagram: Body Electrical - Air Conditioner BE-31Fix Gps GarminNo ratings yet
- English MCCBDocument81 pagesEnglish MCCBLeed ENNo ratings yet
- II BTECH - I SEM - ECE - EDC - THEORY & QUIZ QUESTIONS - MID 2 - Students PDFDocument19 pagesII BTECH - I SEM - ECE - EDC - THEORY & QUIZ QUESTIONS - MID 2 - Students PDFK SrinuNo ratings yet
- Undervoltage Relay MVTU11Document10 pagesUndervoltage Relay MVTU11Johan HendrawanNo ratings yet
- 1SDA066472R1 Moe e xt2 xt4 220 250v Ac DC X Rem ContDocument2 pages1SDA066472R1 Moe e xt2 xt4 220 250v Ac DC X Rem ContHaluk TmlNo ratings yet
- 500 MW Generator's Brushless Excitation and Hydrogen CoolingDocument11 pages500 MW Generator's Brushless Excitation and Hydrogen CoolingAhemadNo ratings yet
- Fluke Energy Saving SeminarDocument116 pagesFluke Energy Saving SeminarJoey Espinosa Asean Engr100% (1)
- Differential Pressure Switches For Gas, Air, Flue and Exhaust Gases GGW A4 GGW A4-U GGW A4/2 GGW A4-U/2Document6 pagesDifferential Pressure Switches For Gas, Air, Flue and Exhaust Gases GGW A4 GGW A4-U GGW A4/2 GGW A4-U/2chao wangNo ratings yet
- Service Manual: HCD-H551Document68 pagesService Manual: HCD-H551Concret SlavaNo ratings yet
- W005F.... W10F: 1.5 A 50 V To 1000 VDocument4 pagesW005F.... W10F: 1.5 A 50 V To 1000 VBraulio Manuel Trejo PerezNo ratings yet
- UEE (6th) May2022Document1 pageUEE (6th) May2022Dikshant DhemareNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)