You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- CMOS Image Sensor Simulation: 2D and 3D SimulationDocument17 pagesCMOS Image Sensor Simulation: 2D and 3D Simulationnasamohd17No ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Design - 2011tables - ITRSDocument24 pagesDesign - 2011tables - ITRSnasamohd17No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Links To This File's Tables and Notes LithographyDocument28 pagesLinks To This File's Tables and Notes Lithographynasamohd17No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- (IV) Water Level Control SystemDocument9 pages(IV) Water Level Control Systemnasamohd17No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Service Manual DLA-32H1 080402Document36 pagesService Manual DLA-32H1 080402elyuyaNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- HK BrochureDocument2 pagesHK BrochureSE KongNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- TC7117Document14 pagesTC7117eryNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Centinel Manual (VER1v4)Document36 pagesCentinel Manual (VER1v4)Zachary Scott50% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Electrical Drives Ans ControlsDocument40 pagesElectrical Drives Ans Controlsjeyasaravanan77No ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Motors and Drives A Practical Technology Guide Dave PolkaDocument387 pagesMotors and Drives A Practical Technology Guide Dave Polkamurad6a9100% (9)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- JV33 - CJV Trouble Shooting of ElectricalDocument1 pageJV33 - CJV Trouble Shooting of ElectricalGarner100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Esquema Electrico It24fDocument2 pagesEsquema Electrico It24fSan Gabriel Representaciones100% (1)
- EEE 3208 Exp-1Document16 pagesEEE 3208 Exp-1Akash HasanNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- AC To DC ParametersDocument4 pagesAC To DC ParametersJehnen BaltazarNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- 793F Plano HidraulicoDocument10 pages793F Plano HidraulicoSam B VladNo ratings yet
- Monitor m8-m9 User ManualDocument242 pagesMonitor m8-m9 User Manualcarlos6696No ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Unit 1 - Step 2Document3 pagesUnit 1 - Step 2Jose Daniel Ochoa MoyaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- A Review of Various Shapes Microstrip Patch Antenna For High Frequency ApplicationsDocument5 pagesA Review of Various Shapes Microstrip Patch Antenna For High Frequency ApplicationsWaleed SethiNo ratings yet
- Science 7 - Module 7 - Version 3Document16 pagesScience 7 - Module 7 - Version 3Michelle Rose EntiaNo ratings yet
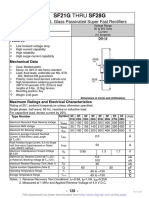
- Sf21G Thru Sf28G: 2.0 AMPS. Glass Passivated Super Fast RectifiersDocument2 pagesSf21G Thru Sf28G: 2.0 AMPS. Glass Passivated Super Fast RectifiersEdward MahNo ratings yet
- Iecex PTB 09.0048Document61 pagesIecex PTB 09.0048Francesco_CNo ratings yet
- 6.boq Ges P-1Document6 pages6.boq Ges P-1RoshanNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Samsung Cl29k3w8x STR CH Ks3aDocument53 pagesSamsung Cl29k3w8x STR CH Ks3aHugo G.No ratings yet
- 1SFA898119R7000 pstx840 600 70 SoftstarterDocument3 pages1SFA898119R7000 pstx840 600 70 SoftstarterShahid FurzanNo ratings yet
- Eee111 Experiment 4Document6 pagesEee111 Experiment 4Amirul 0205No ratings yet
- TPS61197 Single-String White-LED Driver For LCD TV: 1 Features 3 DescriptionDocument30 pagesTPS61197 Single-String White-LED Driver For LCD TV: 1 Features 3 DescriptionIrwantoirwanNo ratings yet
- Introduction To Substation AutomationDocument36 pagesIntroduction To Substation AutomationIlaiyaa RajaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Radio Waves and MicrowavesDocument10 pagesRadio Waves and MicrowavesShelly Ryn SaligumbaNo ratings yet
- Industry Residential Center Lighting ScheduleDocument2 pagesIndustry Residential Center Lighting ScheduleMahmoudRadiNo ratings yet
- Entry N Exit Counter (Final)Document44 pagesEntry N Exit Counter (Final)TanviNo ratings yet
- ET Model QuestionsDocument4 pagesET Model QuestionsN J RamakrishnaNo ratings yet
- Adding True Bypass To A Vintage Big MuffDocument8 pagesAdding True Bypass To A Vintage Big MuffOliver SuttonNo ratings yet
- VK5TM Noise CancellerDocument6 pagesVK5TM Noise CancellerŽeljko MauzerNo ratings yet
- Atoms and Nuclei: Day Thirty ThreeDocument10 pagesAtoms and Nuclei: Day Thirty ThreePrayas RaneNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)