You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- E Draw ManualDocument122 pagesE Draw ManualAnonymous AmpZbtTslG100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- STRUCTURAL DESIGN OF HAND RAIL TITLEDocument3 pagesSTRUCTURAL DESIGN OF HAND RAIL TITLEmsiddiq1100% (1)
- Deaign of Vibrating ScreenDocument13 pagesDeaign of Vibrating Screenprashant mishraNo ratings yet
- Where Do Electrons "Live"?Document38 pagesWhere Do Electrons "Live"?Bless Carmi Ann Santos100% (1)
- Worked Examples Ec2 Def080723Document120 pagesWorked Examples Ec2 Def080723dan_ospir67% (3)
- NTN A1000xi Ball and Roller Bearings LowresDocument282 pagesNTN A1000xi Ball and Roller Bearings LowresHussein RazaqNo ratings yet
- Wolfson Eup3 Ch34 Test BankDocument17 pagesWolfson Eup3 Ch34 Test BankifghelpdeskNo ratings yet
- Autogas Series: Coro-Flo Regenerative Turbine PumpsDocument8 pagesAutogas Series: Coro-Flo Regenerative Turbine PumpsRafael Cotrina Castañeda100% (1)
- Autogas Series: Coro-Flo Regenerative Turbine PumpsDocument8 pagesAutogas Series: Coro-Flo Regenerative Turbine PumpsRafael Cotrina Castañeda100% (1)
- Autogas Series: Coro-Flo Regenerative Turbine PumpsDocument8 pagesAutogas Series: Coro-Flo Regenerative Turbine PumpsRafael Cotrina Castañeda100% (1)
- Antenna em Modeling MatlabDocument284 pagesAntenna em Modeling MatlabMarcelo Perotoni100% (3)
- Science DLLDocument6 pagesScience DLLJEVACLAIR SALVACIONNo ratings yet
- Circuit Analysis II With MATLAB - Steven T. KarrisDocument501 pagesCircuit Analysis II With MATLAB - Steven T. Karriscursedpoetic100% (1)
- Circuit Analysis II With MATLAB - Steven T. KarrisDocument501 pagesCircuit Analysis II With MATLAB - Steven T. Karriscursedpoetic100% (1)
- Filtros Tecfil PDFDocument5 pagesFiltros Tecfil PDFRafael Cotrina CastañedaNo ratings yet
- 075 Autogas Pump: A Cost Effective Alternative To Submersible DesignsDocument2 pages075 Autogas Pump: A Cost Effective Alternative To Submersible DesignsRafael Cotrina CastañedaNo ratings yet
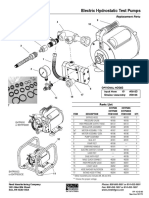
- Test Pumps DPHTP EHTP ENG SP PDFDocument12 pagesTest Pumps DPHTP EHTP ENG SP PDFRafael Cotrina CastañedaNo ratings yet
- 99 EHTP Pump PDFDocument2 pages99 EHTP Pump PDFRafael Cotrina CastañedaNo ratings yet
- Ag104 PDFDocument2 pagesAg104 PDFRafael Cotrina CastañedaNo ratings yet
- Cvjs For Auto 5601-JeDocument25 pagesCvjs For Auto 5601-JeLorena BakerNo ratings yet
- Filtros Tecfil PDFDocument5 pagesFiltros Tecfil PDFRafael Cotrina CastañedaNo ratings yet
- Ag103 PDFDocument2 pagesAg103 PDFRafael Cotrina CastañedaNo ratings yet
- cf100 PDFDocument2 pagescf100 PDFRafael Cotrina CastañedaNo ratings yet
- Ag104 PDFDocument2 pagesAg104 PDFRafael Cotrina CastañedaNo ratings yet
- Ag102 PDFDocument2 pagesAg102 PDFRafael Cotrina CastañedaNo ratings yet
- Aerospace Bearings 8102 III Lowres PDFDocument11 pagesAerospace Bearings 8102 III Lowres PDFRafael Cotrina CastañedaNo ratings yet
- conversao-PUROLATOR PDFDocument4 pagesconversao-PUROLATOR PDFGerenciamentoNo ratings yet
- SolidWorks Tutorial09 AxleSupport English 08 LRDocument49 pagesSolidWorks Tutorial09 AxleSupport English 08 LRArturo CMNo ratings yet
- 075 Autogas Pump: A Cost Effective Alternative To Submersible DesignsDocument2 pages075 Autogas Pump: A Cost Effective Alternative To Submersible DesignsRafael Cotrina CastañedaNo ratings yet
- 2014 NTN Spring Diff Kit Catalog f-14-03-05 PDFDocument68 pages2014 NTN Spring Diff Kit Catalog f-14-03-05 PDFRafael Cotrina CastañedaNo ratings yet
- How To Draw - Drawing and Detailing With Solid WorksDocument51 pagesHow To Draw - Drawing and Detailing With Solid Workskhaibar84No ratings yet
- Chemical Process Control A First Course With Matlab - P.C. Chau PDFDocument255 pagesChemical Process Control A First Course With Matlab - P.C. Chau PDFAli NassarNo ratings yet
- Mod&Sim Sist Fis 2Document46 pagesMod&Sim Sist Fis 2Rafael Cotrina CastañedaNo ratings yet
- Prob 23gdlDocument14 pagesProb 23gdlRafael Cotrina CastañedaNo ratings yet
- 1 Sheet of Calculation (Explanatory Note) See File 625167RR - 01.dwgDocument13 pages1 Sheet of Calculation (Explanatory Note) See File 625167RR - 01.dwgbanhrangNo ratings yet
- Friction Coefficient of Steel On Concrete or GroutDocument7 pagesFriction Coefficient of Steel On Concrete or GroutLuis Ernesto Ramirez OsorioNo ratings yet
- C3 Trig Crib SheetDocument2 pagesC3 Trig Crib Sheetsimirocks52No ratings yet
- Article - Prediction of Composite Properties From A Representative Volume Element - C.T. Sun R.S. VaidyaDocument9 pagesArticle - Prediction of Composite Properties From A Representative Volume Element - C.T. Sun R.S. VaidyajoaogularNo ratings yet
- Lesson 3: Maximizing Entropy: Notes From Prof. Susskind Video Lectures Publicly Available On YoutubeDocument56 pagesLesson 3: Maximizing Entropy: Notes From Prof. Susskind Video Lectures Publicly Available On YoutubeCanan OrtayNo ratings yet
- Emission Spectrum Light and EnergyDocument17 pagesEmission Spectrum Light and EnergyMarilyn Castro LaquindanumNo ratings yet
- Thermo Analytical TechniquesDocument10 pagesThermo Analytical Techniquesthamizh555No ratings yet
- General Theory of Aerodynamic Instability and The Mechanism of Flutter - TheodorsenDocument26 pagesGeneral Theory of Aerodynamic Instability and The Mechanism of Flutter - TheodorsenAbdul Aziz Abdul MajidNo ratings yet
- COMPARING DEFLECTIONSDocument7 pagesCOMPARING DEFLECTIONSYash JainNo ratings yet
- Modeling and Control Solutions For Electric Vehicles: Farhan A. Salem, PHDDocument20 pagesModeling and Control Solutions For Electric Vehicles: Farhan A. Salem, PHDAnonymous OTtwkqVKNo ratings yet
- Perfiles Pesos y NomenglaturasDocument32 pagesPerfiles Pesos y NomenglaturasErick Ccari TapiaNo ratings yet
- Suva 507 Refrigerant: Thermodynamic Properties ofDocument18 pagesSuva 507 Refrigerant: Thermodynamic Properties ofSebastian Andres Catalan BrionesNo ratings yet
- GCSE Physics Paper 2 Model Answer BookletDocument93 pagesGCSE Physics Paper 2 Model Answer BookletIntisharNo ratings yet
- Thermal-hydraulic performance of turbulent flow in corrugated tubesDocument24 pagesThermal-hydraulic performance of turbulent flow in corrugated tubeschaib benchaibNo ratings yet
- Tutorial CH 6Document4 pagesTutorial CH 6WinxTynix 8000No ratings yet
- فيزياء لغات - 2 ثانوي - ترم 1 - مذكرة 1 - ذاكروليDocument30 pagesفيزياء لغات - 2 ثانوي - ترم 1 - مذكرة 1 - ذاكروليKerlos SaeedNo ratings yet
- 14.8 Castigliano'S Theorem: 14. Energy MethodsDocument39 pages14.8 Castigliano'S Theorem: 14. Energy MethodsElbaCarvalhoNo ratings yet
- Tutorial - 4 and Solution Feb 2 2017 FinalDocument2 pagesTutorial - 4 and Solution Feb 2 2017 FinalRounak MajumdarNo ratings yet
- HW06Document2 pagesHW06redman234No ratings yet
- Locking of Hene Laser Modes Induced by Synchronous Intracavity ModulationDocument3 pagesLocking of Hene Laser Modes Induced by Synchronous Intracavity ModulationMohamad paidarNo ratings yet
- HiTRAN Boosting Heat Transfer On Dalia FPSO Cal GavinDocument9 pagesHiTRAN Boosting Heat Transfer On Dalia FPSO Cal GavinSam CartxNo ratings yet
- Experimental Modal Analysis of Stator Overhangs of A Large TurbogeneratorDocument6 pagesExperimental Modal Analysis of Stator Overhangs of A Large TurbogeneratorWrya SaeedNo ratings yet
- Vtu III & IV Sem Syllabus 22-5-8Document37 pagesVtu III & IV Sem Syllabus 22-5-8manjunatha tNo ratings yet
- Fluid Mechanics Assignment 3Document3 pagesFluid Mechanics Assignment 3Vishal kumar SawNo ratings yet
- Turbomachinery Chapter: Pump and Turbine DesignDocument26 pagesTurbomachinery Chapter: Pump and Turbine DesignfauzNo ratings yet