You might also like
- Gas Turbine-Electric LocomotiveDocument4 pagesGas Turbine-Electric LocomotiveaghakhanyNo ratings yet
- ABB System Project Guide Passenger VesselsDocument268 pagesABB System Project Guide Passenger VesselsVlad MocanuNo ratings yet
- The SubmarineDocument196 pagesThe SubmarineFluffy Fluff100% (4)
- Diesel Mechanics by Frank SandersDocument164 pagesDiesel Mechanics by Frank SandersMahdi HocineNo ratings yet
- Submarine DesignDocument73 pagesSubmarine Designfelix_omar_r100% (1)
- Electric Motor in Ship PropulsionDocument13 pagesElectric Motor in Ship PropulsionConcept of ReasoningNo ratings yet
- Teza Doctorat Electric Ship Propulsion PDFDocument117 pagesTeza Doctorat Electric Ship Propulsion PDFpavelionut100% (1)
- Transponder Cross Reference: If Not Locked They Can Be Re-UsedDocument1 pageTransponder Cross Reference: If Not Locked They Can Be Re-UsedkermoriNo ratings yet
- Stapersma - Matching Propulsion Engine With PropulsorDocument8 pagesStapersma - Matching Propulsion Engine With PropulsorTuan Truong MinhNo ratings yet
- Environment in SubmarineDocument138 pagesEnvironment in SubmarineMukesh PadwalNo ratings yet
- Cloyes MasterDocument242 pagesCloyes MasterFredy HernanNo ratings yet
- How Submarines Control Buoyancy to Submerge and SurfaceDocument15 pagesHow Submarines Control Buoyancy to Submerge and SurfaceJezreel EspañolaNo ratings yet
- Submarine DesignDocument70 pagesSubmarine DesignMohd Idris MohiuddinNo ratings yet
- SubmarineDocument30 pagesSubmarinerbnaoNo ratings yet
- Marine Propulsion Systems GuideDocument63 pagesMarine Propulsion Systems GuidetoshugoNo ratings yet
- Air Independent PropulsionDocument8 pagesAir Independent PropulsionArga SetyaNo ratings yet
- Nfs Most Wanted Files ListDocument24 pagesNfs Most Wanted Files ListShazia Salman25% (4)
- Sub Design Is Not Ship DesignDocument16 pagesSub Design Is Not Ship DesignWasim JanNo ratings yet
- Electromagnetic Aircraft Launch SystemDocument8 pagesElectromagnetic Aircraft Launch SystemRikhil Yalamanchi100% (1)
- Submarine DesignDocument2 pagesSubmarine DesignEhsan AmiriNo ratings yet
- Rimse 20100927Document133 pagesRimse 20100927Kamal BukhariNo ratings yet
- O&M - Pegasus 45.21 IngDocument258 pagesO&M - Pegasus 45.21 IngRafael Antonio Calanche Rodriguez100% (2)
- Marine Hydrodynamics Lectures Week 40Document38 pagesMarine Hydrodynamics Lectures Week 40AntonioNo ratings yet
- Mechanism of Submarine Design and Working PrinciplesDocument27 pagesMechanism of Submarine Design and Working PrinciplesTushar SainiNo ratings yet
- Nuclear Marine PropulsionDocument106 pagesNuclear Marine PropulsionJosue Carpio100% (1)
- Fluid Mechanics: Submarine DesignDocument44 pagesFluid Mechanics: Submarine DesignArjun S Rana67% (3)
- Propellers PDFDocument61 pagesPropellers PDFfaridNo ratings yet
- Design and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainDocument7 pagesDesign and Dynamic Study of A 6 KW External Rotor Permanent Magnet Brushless DC Motor For Electric DrivetrainMC ANo ratings yet
- Ohio-Class SubmarineDocument8 pagesOhio-Class Submarinejb2ookwormNo ratings yet
- 2012 Shaw SubsDocument77 pages2012 Shaw SubsArthur BarieNo ratings yet
- Kinetic Energy Flywheel Energy StorageDocument13 pagesKinetic Energy Flywheel Energy StorageSarfarazHasanNo ratings yet
- Kalmar DRF 450 EngineDocument32 pagesKalmar DRF 450 Enginetuấn anh nguyễn100% (1)
- Submarines (Recovered)Document10 pagesSubmarines (Recovered)Mohamed BarakatNo ratings yet
- Weight Analysis of Diesel SubmarineDocument91 pagesWeight Analysis of Diesel SubmarineEhsan Amiri100% (2)
- Submarine Air Purification and Monitoring NATODocument11 pagesSubmarine Air Purification and Monitoring NATOagmibrahim5055No ratings yet
- Air Independent PropulsionDocument19 pagesAir Independent PropulsionRevanth NikkiNo ratings yet
- Analysis of Submarine With The Study of MechanicalDocument12 pagesAnalysis of Submarine With The Study of MechanicalAsser EhabNo ratings yet
- SubmarineDocument28 pagesSubmarinepriyanka12987No ratings yet
- Submarine Technical PaperDocument3 pagesSubmarine Technical PapermanjuNo ratings yet
- Submarine-&-Naval Ship Design For The Littorals-Saab KockumsDocument15 pagesSubmarine-&-Naval Ship Design For The Littorals-Saab KockumsÁlvaro Conti FilhoNo ratings yet
- Advanced Marine Vehicles Mm7xx 2009 2010 Lecture 4Document25 pagesAdvanced Marine Vehicles Mm7xx 2009 2010 Lecture 4Mohamed Abbas KotbNo ratings yet
- Submarine: Submarine Boat (And Is Often Further Shortened To Sub)Document24 pagesSubmarine: Submarine Boat (And Is Often Further Shortened To Sub)priyanshuNo ratings yet
- SubmarineDocument20 pagesSubmarineSpencer Carmical100% (1)
- Electric War Ship PDFDocument38 pagesElectric War Ship PDFSuperducksNo ratings yet
- 5 Propeller DesignDocument50 pages5 Propeller DesignAnca GeaninaNo ratings yet
- GateRudder JMST 2015 PDFDocument13 pagesGateRudder JMST 2015 PDFθανασης ΓκιοκαςNo ratings yet
- Fuel Cell Submarine: A New Environmentally Friendly OptionDocument25 pagesFuel Cell Submarine: A New Environmentally Friendly OptionArielDanieli100% (1)
- Russo V L.submarine Tankers.1960.TRANSDocument50 pagesRusso V L.submarine Tankers.1960.TRANSLe Anh Tuan100% (1)
- Russian Submarine AccidentsDocument4 pagesRussian Submarine Accidentsfeel81100% (1)
- Multi-Engine Submarine Power SuppliesDocument14 pagesMulti-Engine Submarine Power Suppliesdavid2404100% (2)
- "An Era of Esteem": Indus Motor Company LTDDocument39 pages"An Era of Esteem": Indus Motor Company LTDhaidershahtirmizi67% (3)
- 1 DIESEL PRINCIPLESDocument106 pages1 DIESEL PRINCIPLESDharma Gita Surya PrayogaNo ratings yet
- Submarine Power and Propulsion BMT Defence 2008Document17 pagesSubmarine Power and Propulsion BMT Defence 2008Álvaro Conti Filho100% (1)
- Type 53 TorpedoDocument13 pagesType 53 TorpedoUnknown11100% (1)
- Propeller / Hull Status Report 2009Document17 pagesPropeller / Hull Status Report 2009torbjorn25No ratings yet
- Waiting For Breakthrough in Conventional Submarine's Prime MoversDocument9 pagesWaiting For Breakthrough in Conventional Submarine's Prime MoversMukesh PadwalNo ratings yet
- Virginia Tech Designs Advanced Guided Missile SubmarineDocument134 pagesVirginia Tech Designs Advanced Guided Missile SubmarineJoseBetancourtNo ratings yet
- Electromagnetic Aircraft Launch System - Wikipedia PDFDocument37 pagesElectromagnetic Aircraft Launch System - Wikipedia PDFKurian T ChirayilNo ratings yet
- Nick Bradbeer Thesis Master v11 Corrections REDACTEDDocument276 pagesNick Bradbeer Thesis Master v11 Corrections REDACTEDbatra_763079313No ratings yet
- Vol09 Pt04 Issue 01 Submarine Hydrodynamics, Manoeuvring and Control PDFDocument33 pagesVol09 Pt04 Issue 01 Submarine Hydrodynamics, Manoeuvring and Control PDFShyamshesha GiriNo ratings yet
- Modeling railgun EM fields with COMSOLDocument1 pageModeling railgun EM fields with COMSOLAnte Mitar100% (1)
- Design and Fabrication of a Model SubmarineDocument7 pagesDesign and Fabrication of a Model SubmarineAtif Mehmood100% (1)
- Its Time To Get Onboard. Maritime Reporter 2009Document7 pagesIts Time To Get Onboard. Maritime Reporter 2009joaofelipe.msNo ratings yet
- Testing The Alco HaulicsDocument3 pagesTesting The Alco Haulicsstaustell92No ratings yet
- Propulsion SystemDocument3 pagesPropulsion SystemCesar HernandezNo ratings yet
- Engineer Trainee Electronics PDFDocument2 pagesEngineer Trainee Electronics PDFR Aditya Vardhana ReddyNo ratings yet
- KPCL Payment ChallanNEWDocument1 pageKPCL Payment ChallanNEWsuryakanthareddyNo ratings yet
- SsDocument1 pageSshellboyNo ratings yet
- PiezoDocument2 pagesPiezohellboyNo ratings yet
- 653 Be Electronics and Communication Vi SemesterDocument29 pages653 Be Electronics and Communication Vi SemesterhellboyNo ratings yet
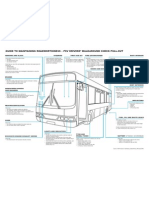
- PSV PulloutDocument1 pagePSV PulloutKeenanCoachesNo ratings yet
- M1 L1 and L2Document18 pagesM1 L1 and L2Mohammed ImranNo ratings yet
- Cycling (Individual Sport) : HistoryDocument9 pagesCycling (Individual Sport) : Historypixie dustNo ratings yet
- Arneson AsdDocument14 pagesArneson AsdSerkan SİPAHİNo ratings yet
- dp0 PDFDocument4 pagesdp0 PDFSimonNo ratings yet
- Diesel Information: Vehicle ElectronicsDocument6 pagesDiesel Information: Vehicle ElectronicsAminadavNo ratings yet
- Gerador Caterpillar EP 150Document1,429 pagesGerador Caterpillar EP 150Gilvan JuniorNo ratings yet
- Technical Information. The CitaroDocument15 pagesTechnical Information. The CitaroEmilNo ratings yet
- FORD All Launch Tools from 01/ 2003 - 05/ 2020Document8 pagesFORD All Launch Tools from 01/ 2003 - 05/ 2020Ricardo BolañosNo ratings yet
- Nigel Gifford Dreamt of A Tuk Tuk and Achieved His DreamDocument2 pagesNigel Gifford Dreamt of A Tuk Tuk and Achieved His DreamgiffordnigelNo ratings yet
- RACE Vault Investment SummaryDocument2 pagesRACE Vault Investment SummaryShitanshuNo ratings yet
- Facts: High-Speed Research - The Tu-144LL: A Supersonic Flying LaboratoryDocument4 pagesFacts: High-Speed Research - The Tu-144LL: A Supersonic Flying LaboratoryNASAdocumentsNo ratings yet
- Zf5hp19fl Code 1060 030 XXXDocument9 pagesZf5hp19fl Code 1060 030 XXXAugusto Barragan MonsivaisNo ratings yet
- Mahindra First Choice Wheels LTD: 4-Wheeler Inspection ReportDocument5 pagesMahindra First Choice Wheels LTD: 4-Wheeler Inspection ReportRavi LoveNo ratings yet
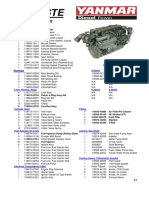
- 6lya SteDocument2 pages6lya SteotavogomesNo ratings yet
- Calculation of Trailing Arm Suspension for Vehicle RearDocument3 pagesCalculation of Trailing Arm Suspension for Vehicle RearJasdeep BajajNo ratings yet
- New Text DocumentDocument6 pagesNew Text Documentyikaw37150No ratings yet
- 4. 베트남 전기자전거 시장동향Document17 pages4. 베트남 전기자전거 시장동향Le Dinh PhongNo ratings yet
- APM - Part 2 Chapter 2C PDFDocument20 pagesAPM - Part 2 Chapter 2C PDFAmit PunjabiNo ratings yet
- PH LandRover PriceSheetDocument1 pagePH LandRover PriceSheetAaron PagdilaoNo ratings yet
- 04 29 2022 Ev1 Consumer Parts Catalog 2Document57 pages04 29 2022 Ev1 Consumer Parts Catalog 2Sayed KhlileNo ratings yet
- Case 580 SLPDocument9 pagesCase 580 SLPRbm Info0% (1)
- Cambelt Intervals DieselDocument2 pagesCambelt Intervals DieselMMNo ratings yet
- Tost Catalogue Engl 2021Document138 pagesTost Catalogue Engl 2021MaiconNo ratings yet