You might also like
- MM2 Linear Algebra 2011 I 1x2Document33 pagesMM2 Linear Algebra 2011 I 1x2Aaron LeeNo ratings yet
- Linear Algebra Chapter 2 - MATRICESDocument39 pagesLinear Algebra Chapter 2 - MATRICESdaniel_bashir808No ratings yet
- An Introduction To Linear Algebra: Matrices and Linear SystemsDocument34 pagesAn Introduction To Linear Algebra: Matrices and Linear SystemsNovember ChickNo ratings yet
- Save from: Solving Systems of Equations using MatricesDocument67 pagesSave from: Solving Systems of Equations using MatricesKhalid GreenNo ratings yet
- Pre-Calculus / Math Notes (Unit 15 of 22)Document14 pagesPre-Calculus / Math Notes (Unit 15 of 22)OmegaUserNo ratings yet
- Matrices: Ij M×N Ij Ij Ij I, J Ij M×N Ij Ij Ij M×NDocument11 pagesMatrices: Ij M×N Ij Ij Ij I, J Ij M×N Ij Ij Ij M×NMaimai Adora SasaNo ratings yet
- MatricesDocument23 pagesMatricesTara MurrayNo ratings yet
- 11.4 Inverse Matrix: M MM M IDocument6 pages11.4 Inverse Matrix: M MM M IAli AkbarNo ratings yet
- Chapter 9 Guide to Matrices and TransformationsDocument38 pagesChapter 9 Guide to Matrices and TransformationsElvira Toktasinova100% (1)
- Matrices and Linear Equations ExplainedDocument34 pagesMatrices and Linear Equations ExplainedChris DevlinNo ratings yet
- 2012 Exam Long Answer SolutionsDocument5 pages2012 Exam Long Answer SolutionsTom DavisNo ratings yet
- Lecture Notes #1: Review of Matrix Algebra: 1 VectorsDocument8 pagesLecture Notes #1: Review of Matrix Algebra: 1 VectorschandrasmgNo ratings yet
- Em02 ImDocument7 pagesEm02 ImPaul Mendoza Dionisio IIINo ratings yet
- OCR FP1 Revision Module in 1.5 HoursDocument11 pagesOCR FP1 Revision Module in 1.5 HoursstudentofstudentNo ratings yet
- Add and Subtract MatricesDocument33 pagesAdd and Subtract MatricesChet AckNo ratings yet
- Convolutions and The Discrete Fourier Transform: 3.1 The Cooley-Tukey AlgorithmDocument17 pagesConvolutions and The Discrete Fourier Transform: 3.1 The Cooley-Tukey AlgorithmStu FletcherNo ratings yet
- Numerical Methods for Engineering ProblemsDocument20 pagesNumerical Methods for Engineering ProblemsRajat NandyNo ratings yet
- BCS-012 (Basic Mathematics)Document466 pagesBCS-012 (Basic Mathematics)Bca Ignou71% (7)
- Solving Linear Equations Matrix MethodsDocument12 pagesSolving Linear Equations Matrix MethodsHamid RehmanNo ratings yet
- Cpe-310B Engineering Computation and Simulation: Solving Sets of EquationsDocument46 pagesCpe-310B Engineering Computation and Simulation: Solving Sets of Equationsali ahmedNo ratings yet
- Engineering Mathematics 1 BMFG 1313 Matrices: Slloh@utem - Edu.my Irma@utem - Edu.myDocument32 pagesEngineering Mathematics 1 BMFG 1313 Matrices: Slloh@utem - Edu.my Irma@utem - Edu.myfitriNo ratings yet
- Part A: Working With MatricesDocument7 pagesPart A: Working With MatricesalibabawalaoaNo ratings yet
- Matrices WDocument21 pagesMatrices WNur SyahadahNo ratings yet
- Topic 1: Matrix DiagonalizationDocument8 pagesTopic 1: Matrix DiagonalizationPerepePereNo ratings yet
- 2.1 Operations With MatricesDocument46 pages2.1 Operations With MatricesJessah Mae E. ReyesNo ratings yet
- Introduction To Financial Econometrics Appendix Matrix Algebra ReviewDocument8 pagesIntroduction To Financial Econometrics Appendix Matrix Algebra ReviewKalijorne MicheleNo ratings yet
- Systems and MatricesDocument15 pagesSystems and MatricesTom DavisNo ratings yet
- Math (P) Refresher Lecture 6: Linear Algebra IDocument9 pagesMath (P) Refresher Lecture 6: Linear Algebra IIrene Mae Sanculi LustinaNo ratings yet
- Topic 2 Matrices and System of Linear EquationsDocument48 pagesTopic 2 Matrices and System of Linear EquationsNorlianah Mohd ShahNo ratings yet
- Linear Algebra Chapter 3 - DeTERMINANTSDocument24 pagesLinear Algebra Chapter 3 - DeTERMINANTSdaniel_bashir808No ratings yet
- Chapter 1Document92 pagesChapter 1LEE LEE LAUNo ratings yet
- Math 2Document60 pagesMath 2Rakibul IslamNo ratings yet
- Chapter 10 Matrices and Determinants: AlgebraDocument15 pagesChapter 10 Matrices and Determinants: AlgebraDinesh KumarNo ratings yet
- Chapter 23Document25 pagesChapter 23Jayaraj LathaNo ratings yet
- MATHEMATICAL TOOLS FOR PHYSICSDocument16 pagesMATHEMATICAL TOOLS FOR PHYSICSJit AggNo ratings yet
- Elementary Linear AlgebraDocument197 pagesElementary Linear Algebrajilbo604No ratings yet
- Notes Matrices, Determinants, Eigen Values and Eigen VectorsDocument51 pagesNotes Matrices, Determinants, Eigen Values and Eigen VectorsDaniel Agbaje100% (1)
- 18.02 Lectures 1 & 2Document6 pages18.02 Lectures 1 & 2aanzah.tirmizi8715No ratings yet
- MIT18 02SC MNotes m1 PDFDocument4 pagesMIT18 02SC MNotes m1 PDFNABIL HUSSAINNo ratings yet
- Lecture Notes For Mathematical Methods For Economics I Prepared by M. Franklin and R. Hosein Chapter 5: Operation On Vectors & MatricesDocument36 pagesLecture Notes For Mathematical Methods For Economics I Prepared by M. Franklin and R. Hosein Chapter 5: Operation On Vectors & MatricesShimeque SmithNo ratings yet
- Mws Gen Inp TXT SplineDocument12 pagesMws Gen Inp TXT SplineApuu Na Juak EhNo ratings yet
- Putnam Linear AlgebraDocument6 pagesPutnam Linear AlgebrainfinitesimalnexusNo ratings yet
- Mate Matic ADocument154 pagesMate Matic ADarnel Izekial HVNo ratings yet
- Diagonal Matrices, Inverse MatrixDocument19 pagesDiagonal Matrices, Inverse MatrixindelamNo ratings yet
- MATLAB Basics in 40 CharactersDocument50 pagesMATLAB Basics in 40 CharactersOleg ZenderNo ratings yet
- Matrices UpdateDocument6 pagesMatrices Updateapi-349545585100% (1)
- Week 12 - Lecture Notes Special MatricesDocument25 pagesWeek 12 - Lecture Notes Special MatricesFarheen NawaziNo ratings yet
- Matrix Matrix OpnDocument20 pagesMatrix Matrix OpnVinod NambiarNo ratings yet
- Appendix: - This HasDocument5 pagesAppendix: - This HasAbdulHafizK.No ratings yet
- Stage 3 Revision Sheet HigherDocument9 pagesStage 3 Revision Sheet Highercozzy'mozzy..dozzy.;No ratings yet
- MAT 1332D W12: Midterm Exam Review: Equilibrium Points, Stability, and Phase-Line DiagramsDocument10 pagesMAT 1332D W12: Midterm Exam Review: Equilibrium Points, Stability, and Phase-Line DiagramsAnggraeni DianNo ratings yet
- Ipmat Indore 2021 Official Paper 02760aa991f7bDocument23 pagesIpmat Indore 2021 Official Paper 02760aa991f7bSamir Shiva ReddyNo ratings yet
- 1850 Lecture3Document9 pages1850 Lecture3Wing cheung HoNo ratings yet
- SMART ACHIEVERS MATH FORMULAEDocument9 pagesSMART ACHIEVERS MATH FORMULAEAdarsh Dongare100% (4)
- MATH219 Lecture 6Document9 pagesMATH219 Lecture 6Serdar BilgeNo ratings yet
- Determinants - Ch. 2.1, 2.2, 2.3, 2.4, 2.5Document52 pagesDeterminants - Ch. 2.1, 2.2, 2.3, 2.4, 2.5Bryan PenfoundNo ratings yet
- The Fundamentals: Algorithms The IntegersDocument55 pagesThe Fundamentals: Algorithms The Integersnguyên trần minhNo ratings yet
- Matrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")From EverandMatrices with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Rating: 3 out of 5 stars3/5 (4)
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesFrom EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesNo ratings yet
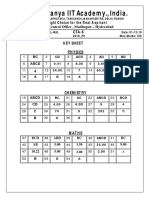
- 01-12-19 - Sri Chaitanya-Sr - Chaina-I - L-I & II - Jee-Adv - 2018-P2 - CTA-6 - Key & Sol'sDocument20 pages01-12-19 - Sri Chaitanya-Sr - Chaina-I - L-I & II - Jee-Adv - 2018-P2 - CTA-6 - Key & Sol'sSridhar ReddyNo ratings yet
- Trigonometry PDFDocument290 pagesTrigonometry PDFPatania NazzarenoNo ratings yet
- Chap 2 FormDocument64 pagesChap 2 FormaimiNo ratings yet
- Kiehn-Article-Topology and Topological Evolution of Clasic Electromagnetic Fields-1998Document36 pagesKiehn-Article-Topology and Topological Evolution of Clasic Electromagnetic Fields-1998Anonymous 9rJe2lOskxNo ratings yet
- Similar Shapes PDFDocument12 pagesSimilar Shapes PDFJamesNo ratings yet
- Angles in Circles H 1Document16 pagesAngles in Circles H 1Ateef Hatifa100% (2)
- Lab Act 2 PhysicsDocument5 pagesLab Act 2 PhysicsraphaelNo ratings yet
- 250-256!4!5 Isosceles and Equilateral TrianglesDocument7 pages250-256!4!5 Isosceles and Equilateral TrianglesAref Dahabrah100% (1)
- Faces, Edges and Vertices-3D ShapesDocument11 pagesFaces, Edges and Vertices-3D Shapesshirleydavid82100% (1)
- MECH 211 - Mechanical Engineering Drawing: François TardyDocument68 pagesMECH 211 - Mechanical Engineering Drawing: François TardyFrancois TardyNo ratings yet
- Nine-Point CircleDocument17 pagesNine-Point Circleky6959ky2100% (7)
- Space Time MatterDocument517 pagesSpace Time MatterETL100% (1)
- 1 4notesDocument16 pages1 4notesRobert BernalesNo ratings yet
- O Level Math Trigonometry (Solved)Document36 pagesO Level Math Trigonometry (Solved)Suhaan HussainNo ratings yet
- Math 139-1 Lesson 6 and 7Document52 pagesMath 139-1 Lesson 6 and 7jenny teresa50% (2)
- AutoCAD HotkeysDocument6 pagesAutoCAD HotkeysKaryll Heart LayugNo ratings yet
- G2 Physics 1Document37 pagesG2 Physics 1Carlina FerreraNo ratings yet
- B.SC - II Year Maths PDFDocument8 pagesB.SC - II Year Maths PDFViswas Kumar Jha0% (1)
- Quarter 2 Lesson 1-2 (Week 7)Document28 pagesQuarter 2 Lesson 1-2 (Week 7)Angelo ResuelloNo ratings yet
- Intro to Probability Lesson 4Document15 pagesIntro to Probability Lesson 4Ross Christian Corpuz ManuelNo ratings yet
- WK 11 12 Geometric Designs and 2dDocument61 pagesWK 11 12 Geometric Designs and 2dHoneybunch beforeNo ratings yet
- Quantitative TechniqueDocument3,715 pagesQuantitative Techniquess tNo ratings yet
- Catb 2008 eDocument25 pagesCatb 2008 estankoubNo ratings yet
- Applying Gauss's Law to Determine Electric FieldsDocument25 pagesApplying Gauss's Law to Determine Electric FieldsSayyad aliNo ratings yet
- Mathematics and VisualizationDocument337 pagesMathematics and VisualizationFrederico Lopes0% (1)
- Transform and Sinusoidal Funct 11Document16 pagesTransform and Sinusoidal Funct 11Dhan CNo ratings yet
- MathematicsDocument9 pagesMathematicsJohn Eivhon FestijoNo ratings yet
- CG MCQDocument38 pagesCG MCQsuraj rautNo ratings yet
- Trigonometry A Unit Circle Approach 10th Edition Sullivan Test Bank 1Document107 pagesTrigonometry A Unit Circle Approach 10th Edition Sullivan Test Bank 1Doris Golden100% (39)
- 2.3.A Glass BoxDocument14 pages2.3.A Glass BoxMarealz MoresaNo ratings yet