You might also like
- GE42 DSP 22 p1Document75 pagesGE42 DSP 22 p1Imane ZahiriNo ratings yet
- Embedded Systems I/O: Version 2 EE IIT, Kharagpur 1Document20 pagesEmbedded Systems I/O: Version 2 EE IIT, Kharagpur 1ahamedNo ratings yet
- Chapter 2Document31 pagesChapter 2pavanikaveesha9562No ratings yet
- An FPGA-Based Digital Modulation Signal Generator With Fading Channel EmulationDocument5 pagesAn FPGA-Based Digital Modulation Signal Generator With Fading Channel Emulationsenao71263No ratings yet
- DSP Fundamentals ExplainedDocument37 pagesDSP Fundamentals Explainedruss90No ratings yet
- EE969-469 DSP Notes 2019Document118 pagesEE969-469 DSP Notes 2019joahua mickkinNo ratings yet
- DSP 5Document5 pagesDSP 5Arik JuniarNo ratings yet
- LESSON - 1 - Introduction To Signals Spectra and Signal ProcessingDocument24 pagesLESSON - 1 - Introduction To Signals Spectra and Signal ProcessingVicente Alberm F. Cruz-AmNo ratings yet
- Digital FiltersDocument24 pagesDigital FiltersRharif AnassNo ratings yet
- Software Design of Digital Receiver Using FPGADocument5 pagesSoftware Design of Digital Receiver Using FPGAAnonymous kw8Yrp0R5rNo ratings yet
- Under Water Communication (UWC) With Idma SchemeDocument78 pagesUnder Water Communication (UWC) With Idma Schemepankajmadhu100% (1)
- EECT6306 Miidterm Project Harshit VamshiDocument13 pagesEECT6306 Miidterm Project Harshit Vamshiafrica threeNo ratings yet
- Greatest Common Divisor Circuit Design Greatest Common Divisor Circuit DesignDocument35 pagesGreatest Common Divisor Circuit Design Greatest Common Divisor Circuit Designvishalideepak1324No ratings yet
- DSP Lab Manual Updated - August2018Document80 pagesDSP Lab Manual Updated - August2018Qasim LodhiNo ratings yet
- DSP ArchitecturesDocument71 pagesDSP ArchitecturesSaikrishna GarlapatiNo ratings yet
- Signal Processsing ElementDocument40 pagesSignal Processsing Elementkibrom atsbhaNo ratings yet
- Unit I - Introduction SyllabusDocument18 pagesUnit I - Introduction Syllabusrahaman mahamadNo ratings yet
- Course Notes Advanced DSPDocument122 pagesCourse Notes Advanced DSPAnonymous hDKqasfNo ratings yet
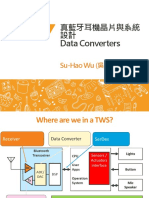
- 真藍牙耳機晶片與系統 設計 Data Converters: Su-Hao Wu (吳書豪)Document48 pages真藍牙耳機晶片與系統 設計 Data Converters: Su-Hao Wu (吳書豪)黃良初100% (1)
- Digital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisDocument22 pagesDigital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetiserichaasNo ratings yet
- Introduction To THE TMS320C6000 Vliw DSP: Prof. Brian L. EvansDocument33 pagesIntroduction To THE TMS320C6000 Vliw DSP: Prof. Brian L. EvanskimoNo ratings yet
- Advanced Topics in Digital Signal ProcessingDocument23 pagesAdvanced Topics in Digital Signal ProcessingJadur RahmanNo ratings yet
- DSPAA NotesDocument42 pagesDSPAA NotesKushagra SharmaNo ratings yet
- Pewujudan Tapis Digital FIR Pemilih Frekuensi Menggunakan DSK TMS320C6713Document7 pagesPewujudan Tapis Digital FIR Pemilih Frekuensi Menggunakan DSK TMS320C6713Effrada LamantaNo ratings yet
- Chapter1 PDFDocument40 pagesChapter1 PDFHương HươngNo ratings yet
- Digital Signal Processing FundamentalsDocument15 pagesDigital Signal Processing FundamentalsPreetham SaigalNo ratings yet
- TDM Based Fir FilterDocument5 pagesTDM Based Fir FilterPrajwal K MysoreNo ratings yet
- Lecture 2Document22 pagesLecture 2Amir KhanNo ratings yet
- Dep Chapter 1Document55 pagesDep Chapter 1Daniel MengeshaNo ratings yet
- A Three-Stage Operational Transconductance Amplifier For Delta Sigma ModulatorDocument6 pagesA Three-Stage Operational Transconductance Amplifier For Delta Sigma ModulatorZuriel EduardoNo ratings yet
- High Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationsDocument10 pagesHigh Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationslathavenkyNo ratings yet
- Systems For Digital Signal Processing: 1 - IntroductionDocument21 pagesSystems For Digital Signal Processing: 1 - IntroductionBomber KillerNo ratings yet
- Real-time DSP Lecture TMS320C6xDocument42 pagesReal-time DSP Lecture TMS320C6xAndika Dwi RubyantoroNo ratings yet
- Dspa Question BankDocument2 pagesDspa Question BankPanku RangareeNo ratings yet
- SM 6th SEM Etc Digital Signal ProcessingDocument37 pagesSM 6th SEM Etc Digital Signal ProcessingPrakhar ParasharNo ratings yet
- Sine Output DDSs A Survey of The State of The ArtDocument9 pagesSine Output DDSs A Survey of The State of The ArtTiagoNo ratings yet
- S19 L2 Intro Data ConversionDocument64 pagesS19 L2 Intro Data ConversionDr Senthilkumar GNo ratings yet
- Source and Channel Encoder and Decoder Modeling: S-72.333 Postgraduate Course in Radiocommunications Fall 2000Document17 pagesSource and Channel Encoder and Decoder Modeling: S-72.333 Postgraduate Course in Radiocommunications Fall 2000Adarsh AnchiNo ratings yet
- DSP 2012Document82 pagesDSP 2012SREELEKHA K RNo ratings yet
- Adaptive Signal ProcessingDocument24 pagesAdaptive Signal Processinganilshaw27No ratings yet
- DSP ArchitectureDocument71 pagesDSP ArchitectureAnishKumar100% (1)
- Chapter 8Document8 pagesChapter 8Aldon JimenezNo ratings yet
- Análisis de Señales - IntroductionDocument32 pagesAnálisis de Señales - IntroductionKeiner Jose Urbina CardenasNo ratings yet
- Sebuah JurnalDocument8 pagesSebuah JurnalsyiraNo ratings yet
- AC 1997paper109 PDFDocument8 pagesAC 1997paper109 PDFFranklin Cardeñoso FernándezNo ratings yet
- Unicore Systems LTD: Low-Pass IIR (Infinite Impulse Response) Filter IP Core User ManualDocument4 pagesUnicore Systems LTD: Low-Pass IIR (Infinite Impulse Response) Filter IP Core User ManualBhaskar KNo ratings yet
- DSP Lab Manual: 5 Semester Electronics and Communication Subject Code: 18ecl57 2020-21Document58 pagesDSP Lab Manual: 5 Semester Electronics and Communication Subject Code: 18ecl57 2020-21Axis AlexNo ratings yet
- Calibration Techniques in Adcs: Ahmed M. A. Ali Analog Devices, IncDocument74 pagesCalibration Techniques in Adcs: Ahmed M. A. Ali Analog Devices, IncdxzhangNo ratings yet
- Signal Processing: KeyboardDocument4 pagesSignal Processing: KeyboardFELIX ORATINo ratings yet
- DSP Block Diagram Explained with ADC and DAC ImportanceDocument4 pagesDSP Block Diagram Explained with ADC and DAC ImportanceAnil Shrestha100% (3)
- DSP Lecture 2Document44 pagesDSP Lecture 2hussein alamutuNo ratings yet
- Unit 7: Audio Signal Processing: 4.1 HardwareDocument14 pagesUnit 7: Audio Signal Processing: 4.1 HardwareDr M Jayanthi100% (1)
- VLSI Digital Signal Processing Systems DesignDocument25 pagesVLSI Digital Signal Processing Systems DesignManju SharmaNo ratings yet
- Chap2 PDFDocument25 pagesChap2 PDFManju SharmaNo ratings yet
- Chap2 PDFDocument25 pagesChap2 PDFManju SharmaNo ratings yet
- Chap2 PDFDocument25 pagesChap2 PDFANITHA MNo ratings yet
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- Task Scheduling IDocument21 pagesTask Scheduling IbennettmatthewNo ratings yet
- Fpga ApplicationsDocument19 pagesFpga ApplicationsSanthi SriNo ratings yet
- Stepper MotorDocument32 pagesStepper Motorapi-26587237100% (2)
- Real-Time Scheduling Algorithms ExplainedDocument24 pagesReal-Time Scheduling Algorithms ExplainedSuranga SampathNo ratings yet
- Beginners Introduction To The Assembly Language of ATMEL AVR MicroprocessorsDocument58 pagesBeginners Introduction To The Assembly Language of ATMEL AVR Microprocessorsapi-3698538100% (5)
- Embedded Communications: Version 2 EE IIT, Kharagpur 1Document11 pagesEmbedded Communications: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Embedded Communications: Version 2 EE IIT, Kharagpur 1Document11 pagesEmbedded Communications: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Embedded 28Document28 pagesEmbedded 28ahamedNo ratings yet
- Embedded Communications: Version 2 EE IIT, Kharagpur 1Document15 pagesEmbedded Communications: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Embedded 23Document20 pagesEmbedded 23ahamedNo ratings yet
- Testing of Embedded System: Version 2 EE IIT, Kharagpur 1Document12 pagesTesting of Embedded System: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Testing of Embedded System: Version 2 EE IIT, Kharagpur 1Document23 pagesTesting of Embedded System: Version 2 EE IIT, Kharagpur 1ahamed100% (1)
- Embedded 25Document20 pagesEmbedded 25ahamed100% (4)
- Design of Embedded Processors: Version 2 EE IIT, Kharagpur 1Document19 pagesDesign of Embedded Processors: Version 2 EE IIT, Kharagpur 1ahamedNo ratings yet
- Verilog Lesson 21Document25 pagesVerilog Lesson 21123vidyaNo ratings yet
- Lesson 14Document18 pagesLesson 14satsoexNo ratings yet
- Embedded Systems I/O: Version 2 EE IIT, Kharagpur 1Document10 pagesEmbedded Systems I/O: Version 2 EE IIT, Kharagpur 1ahamed100% (2)
- Interrupt Structure of 8051Document16 pagesInterrupt Structure of 8051Amar SinghNo ratings yet
- Lesson 13Document22 pagesLesson 13satsoexNo ratings yet
- Embedded Systems I/O: Version 2 EE IIT, Kharagpur 1Document14 pagesEmbedded Systems I/O: Version 2 EE IIT, Kharagpur 1ahamedNo ratings yet
- Embedded Systems IO - Lesson 4Document12 pagesEmbedded Systems IO - Lesson 4Emin KültürelNo ratings yet
- Embedded Processors and Memory: Version 2 EE IIT, Kharagpur 1Document9 pagesEmbedded Processors and Memory: Version 2 EE IIT, Kharagpur 1ahamed100% (7)
- Lesson 11Document10 pagesLesson 11satsoexNo ratings yet
- Embedded EbookDocument14 pagesEmbedded EbookDeepak BhatNo ratings yet
- Lesson 9Document11 pagesLesson 9satsoexNo ratings yet
- Embedded Processors and Memory: Version 2 EE IIT, Kharagpur 1Document15 pagesEmbedded Processors and Memory: Version 2 EE IIT, Kharagpur 1ahamedNo ratings yet
- Embedded SystemDocument20 pagesEmbedded Systempra0408No ratings yet
- Lesson 6Document12 pagesLesson 6Sunny MakinNo ratings yet
- Alfa Laval Complete Fittings CatalogDocument224 pagesAlfa Laval Complete Fittings CatalogGraciele SoaresNo ratings yet
- Self-Assessment On Accountability: I. QuestionsDocument2 pagesSelf-Assessment On Accountability: I. QuestionsAjit Kumar SahuNo ratings yet
- High Altitude Compensator Manual 10-2011Document4 pagesHigh Altitude Compensator Manual 10-2011Adem NuriyeNo ratings yet
- Elaspeed Cold Shrink Splices 2010Document3 pagesElaspeed Cold Shrink Splices 2010moisesramosNo ratings yet
- 2006-07 (Supercupa) AC Milan-FC SevillaDocument24 pages2006-07 (Supercupa) AC Milan-FC SevillavasiliscNo ratings yet
- 158 Oesmer Vs Paraisa DevDocument1 page158 Oesmer Vs Paraisa DevRobelle Rizon100% (1)
- Prestressing ProductsDocument40 pagesPrestressing ProductsSakshi Sana100% (1)
- Las Q1Document9 pagesLas Q1Gaux SkjsjaNo ratings yet
- WELDING EQUIPMENT CALIBRATION STATUSDocument4 pagesWELDING EQUIPMENT CALIBRATION STATUSAMIT SHAHNo ratings yet
- KDL 23S2000Document82 pagesKDL 23S2000Carlos SeguraNo ratings yet
- Guidelines On Accreditation of CSOs (LSB Representation) - DILG MC 2019-72Document18 pagesGuidelines On Accreditation of CSOs (LSB Representation) - DILG MC 2019-72Cedric Dequito100% (1)
- 1.1 Introduction To Networks - Networks Affect Our LivesDocument2 pages1.1 Introduction To Networks - Networks Affect Our LivesCristian MoralesNo ratings yet
- Novirost Sample TeaserDocument2 pagesNovirost Sample TeaserVlatko KotevskiNo ratings yet
- Analyze Oil Wear DebrisDocument2 pagesAnalyze Oil Wear Debristhoma111sNo ratings yet
- Bentone 30 Msds (Eu-Be)Document6 pagesBentone 30 Msds (Eu-Be)Amir Ososs0% (1)
- Model:: Powered by CUMMINSDocument4 pagesModel:: Powered by CUMMINSСергейNo ratings yet
- Developing a Positive HR ClimateDocument15 pagesDeveloping a Positive HR ClimateDrPurnima SharmaNo ratings yet
- Pyrometallurgical Refining of Copper in An Anode Furnace: January 2005Document13 pagesPyrometallurgical Refining of Copper in An Anode Furnace: January 2005maxi roaNo ratings yet
- Growatt SPF3000TL-HVM (2020)Document2 pagesGrowatt SPF3000TL-HVM (2020)RUNARUNNo ratings yet
- TEST BANK: Daft, Richard L. Management, 11th Ed. 2014 Chapter 16 Motivating EmplDocument37 pagesTEST BANK: Daft, Richard L. Management, 11th Ed. 2014 Chapter 16 Motivating Emplpolkadots939100% (1)
- Expert Business Analyst Darryl Cropper Seeks New OpportunityDocument8 pagesExpert Business Analyst Darryl Cropper Seeks New OpportunityRajan GuptaNo ratings yet
- ABS Rules for Steel Vessels Under 90mDocument91 pagesABS Rules for Steel Vessels Under 90mGean Antonny Gamarra DamianNo ratings yet
- 7458-PM Putting The Pieces TogetherDocument11 pages7458-PM Putting The Pieces Togethermello06No ratings yet
- Insulators and Circuit BreakersDocument29 pagesInsulators and Circuit Breakersdilja aravindanNo ratings yet
- Business Case - Uganda Maize Export To South SudanDocument44 pagesBusiness Case - Uganda Maize Export To South SudanInfiniteKnowledge33% (3)
- Usa Easa 145Document31 pagesUsa Easa 145Surya VenkatNo ratings yet
- Excavator Loading To Truck TrailerDocument12 pagesExcavator Loading To Truck TrailerThy RonNo ratings yet
- John GokongweiDocument14 pagesJohn GokongweiBela CraigNo ratings yet
- Module 5Document10 pagesModule 5kero keropiNo ratings yet
- Bob Duffy's 27 Years in Database Sector and Expertise in SQL Server, SSAS, and Data Platform ConsultingDocument26 pagesBob Duffy's 27 Years in Database Sector and Expertise in SQL Server, SSAS, and Data Platform ConsultingbrusselarNo ratings yet