You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Rolling - Off Simulation of Bevel Gears For Strength-And Durability AssessmentDocument14 pagesRolling - Off Simulation of Bevel Gears For Strength-And Durability AssessmentLatha PundiNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Tan GramsDocument2 pagesTan GramsLatha PundiNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Sample Worksheet FromDocument42 pagesSample Worksheet FromLatha Pundi75% (4)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Grade 6 Math Circles Working With An Abacus: Faculty of Mathematics Waterloo, Ontario N2L 3G1Document10 pagesGrade 6 Math Circles Working With An Abacus: Faculty of Mathematics Waterloo, Ontario N2L 3G1Latha PundiNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Paper CuttingDocument5 pagesPaper CuttingLatha PundiNo ratings yet
- Booklet PackADocument20 pagesBooklet PackALatha PundiNo ratings yet
- Booklet PackBDocument20 pagesBooklet PackBLatha PundiNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Basics of The Al AbacusDocument2 pagesBasics of The Al AbacusLatha PundiNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Abacus: To Read Numbers On An Abacus, Count The Beads Moved To The Center Bar in Each Place ValueDocument2 pagesThe Abacus: To Read Numbers On An Abacus, Count The Beads Moved To The Center Bar in Each Place ValueLatha PundiNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Mathematics For Computer Science Today's LectureDocument14 pagesMathematics For Computer Science Today's LectureLatha PundiNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Manufacturing Fired Bricks With Class F Fly Ash From Illinois Basin CoalsDocument36 pagesManufacturing Fired Bricks With Class F Fly Ash From Illinois Basin CoalsLatha PundiNo ratings yet
- Adding With 8: Sample Worksheet FromDocument1 pageAdding With 8: Sample Worksheet FromLatha PundiNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Din 3967-1978 EngDocument24 pagesDin 3967-1978 EngLatha Pundi100% (4)
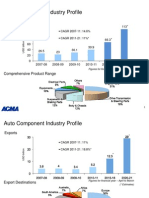
- Industry Statistics 23092011Document3 pagesIndustry Statistics 23092011Latha PundiNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Full Content 339Document10 pagesFull Content 339Latha PundiNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Sample in TC TL ManualDocument16 pagesSample in TC TL ManualLatha PundiNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Car Stock ListDocument17 pagesCar Stock ListMatt WongNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Full Range Price ListDocument1 pageFull Range Price Listayawe888888No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Tractors 2005Document1 pageTractors 2005АлександрNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Lista de Precios Actualizada Rushmore Venezuela 05 Marzo 2021Document70 pagesLista de Precios Actualizada Rushmore Venezuela 05 Marzo 2021Luis Alberto Valderrama ZuñigaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Audi Price ListDocument31 pagesAudi Price ListIenci DariusNo ratings yet
- Issue 15Document60 pagesIssue 15OutdoorUAENo ratings yet
- CO2 PassengerDocument3,573 pagesCO2 PassengerFlorin OpreaNo ratings yet
- Air CompressorDocument16 pagesAir CompressorAlfred ZhaoNo ratings yet
- Ma - Filtros TecfilDocument5 pagesMa - Filtros TecfilLuan TeixeiraNo ratings yet
- TAM Pricelist Plat Hitam 1 Oktober 2023 - Tanpa TTD NewDocument107 pagesTAM Pricelist Plat Hitam 1 Oktober 2023 - Tanpa TTD NewNila WahyuNo ratings yet
- Baja SAE Auburn Design Report Cleveland State University 16Document10 pagesBaja SAE Auburn Design Report Cleveland State University 16Noel Mahung Melendez100% (1)
- EWS Madeira 2019 ResultsDocument15 pagesEWS Madeira 2019 ResultsPinkbikeNo ratings yet
- Cars Pricelist UpdatedDocument16 pagesCars Pricelist UpdatedEdenjoy Palacay Macugay Estabillo-CallanganNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- New Addition: Pu Bushes Tata / Leyland / Jeep / Sumo /ace / QualisDocument1 pageNew Addition: Pu Bushes Tata / Leyland / Jeep / Sumo /ace / QualisKushagraSinghNo ratings yet
- 20 Highlander VinDocument3 pages20 Highlander VinMOGES ABERANo ratings yet
- WWW - Nasicoelec.ir: Electrical Wiring DiagramDocument60 pagesWWW - Nasicoelec.ir: Electrical Wiring DiagramMuhammad Fauzi100% (2)
- D4B805CB339-Manual For Troubleshooting and Diagnosing NoisesDocument25 pagesD4B805CB339-Manual For Troubleshooting and Diagnosing NoisesAnonymous W7u3qzaO0PNo ratings yet
- CenovnikDocument20 pagesCenovnikAleks StojkovNo ratings yet
- Akebono Japan Original BreakpadsDocument4 pagesAkebono Japan Original Breakpadsrobert tanNo ratings yet
- BREMACH T-REX Book - UK PDFDocument36 pagesBREMACH T-REX Book - UK PDFJohn DavisNo ratings yet
- Inov8 Tabela CanbusDocument13 pagesInov8 Tabela CanbusMario junior Castro OliveiraNo ratings yet
- Land Rover Automatic Transmission Fluid RecommendationsDocument6 pagesLand Rover Automatic Transmission Fluid Recommendationsjuan manuel vazquez floresNo ratings yet
- Computer Data Lines CircuitDocument4 pagesComputer Data Lines CircuitAliNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Telawei Snorkel & 4x4 Products Promotion Price List - 02 PDFDocument15 pagesTelawei Snorkel & 4x4 Products Promotion Price List - 02 PDFkakashkaNo ratings yet
- Ecu AudiDocument14 pagesEcu Audieduardorojas007No ratings yet
- VALEODocument1 pageVALEOAlejandro RojasNo ratings yet
- YFM700PF/YFM700PHF/YFM700PSF YFM700PLF/YFM700FWAD: Owner'S Manual Manuel Du Propriétaire Manual Del PropietarioDocument172 pagesYFM700PF/YFM700PHF/YFM700PSF YFM700PLF/YFM700FWAD: Owner'S Manual Manuel Du Propriétaire Manual Del Propietariog rNo ratings yet
- Jeep YJ 87-90 Parts ListDocument1,229 pagesJeep YJ 87-90 Parts ListLarry Carter100% (4)
- Taller 2operativa 1Document13 pagesTaller 2operativa 1Maria jose MendozaNo ratings yet
- Email: psj0024@Document99 pagesEmail: psj0024@jackpanNo ratings yet
- Elevate and Dominate: 21 Ways to Win On and Off the FieldFrom EverandElevate and Dominate: 21 Ways to Win On and Off the FieldRating: 5 out of 5 stars5/5 (7)
- Merle's Door: Lessons from a Freethinking DogFrom EverandMerle's Door: Lessons from a Freethinking DogRating: 4 out of 5 stars4/5 (326)