You might also like
- First-Order System: Transient Response of A Thermocouple To A Step Temperature ChangeDocument3 pagesFirst-Order System: Transient Response of A Thermocouple To A Step Temperature ChangeAnand RajNo ratings yet
- Lectures On Mechanical System Dynamics: Today's Lecture: Response of SDOF Systems To Non-Periodic ExcitationsDocument12 pagesLectures On Mechanical System Dynamics: Today's Lecture: Response of SDOF Systems To Non-Periodic ExcitationsGiovanniDelGrecoNo ratings yet
- Free Vibration of Single-Degree-Of-freedom SystemsDocument7 pagesFree Vibration of Single-Degree-Of-freedom SystemsShafiq ShajaNo ratings yet
- ME 535 - Vibrations Transient Vibration: F FTDTDocument3 pagesME 535 - Vibrations Transient Vibration: F FTDTJason ChiangNo ratings yet
- Lecture 9 Response To General Dynamic LoadingDocument12 pagesLecture 9 Response To General Dynamic LoadingTUAMIGOVANCITONo ratings yet
- DRG Sesi 5 SDoF Transient ExcitationDocument21 pagesDRG Sesi 5 SDoF Transient ExcitationanggaNo ratings yet
- DRG Sesi 4 SDoF Forced VibrationDocument10 pagesDRG Sesi 4 SDoF Forced VibrationanggaNo ratings yet
- 1.5.4 Convolution Approach: x mω t ≥ τ, x t < τDocument1 page1.5.4 Convolution Approach: x mω t ≥ τ, x t < τAshutosh KumarNo ratings yet
- Mechanical Vibration Forced UndampedDocument19 pagesMechanical Vibration Forced UndampedShafiq ShapianNo ratings yet
- WWW - Enggnotes.In: Concepts of Mechanical VibrationsDocument2 pagesWWW - Enggnotes.In: Concepts of Mechanical VibrationsTrigger DineshNo ratings yet
- Impulse Response FunctionsDocument12 pagesImpulse Response Functionsharisraja47985No ratings yet
- Homework SolutionDocument23 pagesHomework Solutionyashar250067% (3)
- General Forced ResponseDocument21 pagesGeneral Forced ResponsekalpanaadhiNo ratings yet
- STRC201 Sdof JMWBDocument99 pagesSTRC201 Sdof JMWBJura PateregaNo ratings yet
- Background: Mpleta de LaDocument1 pageBackground: Mpleta de LayoplaNo ratings yet
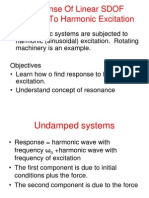
- Response of Linear SDOF Systems To Harmonic ExcitationDocument20 pagesResponse of Linear SDOF Systems To Harmonic ExcitationalappbhattNo ratings yet
- Engineering Dynamics CourseworkDocument14 pagesEngineering Dynamics CourseworkAli Abdulla100% (1)
- STRC201 Sdof JMWB PDFDocument99 pagesSTRC201 Sdof JMWB PDFAkash ChandraNo ratings yet
- 1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Document99 pages1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Amandeep SinghNo ratings yet
- Newtonian Mechanics - Part 1: L Del Debbio, University of EdinburghDocument12 pagesNewtonian Mechanics - Part 1: L Del Debbio, University of Edinburghcharles luisNo ratings yet
- Topic 4 Convolution IntegralDocument5 pagesTopic 4 Convolution IntegralRona SharmaNo ratings yet
- Free Vibration With Coulomb Damping Examples: With Many Figures and Models From Mechanical Vibrations, S. S. RaoDocument20 pagesFree Vibration With Coulomb Damping Examples: With Many Figures and Models From Mechanical Vibrations, S. S. RaoMihir AsharNo ratings yet
- Notes Dynamics UC3MDocument6 pagesNotes Dynamics UC3MAnonymous oFxrAqvNo ratings yet
- Response of First Order System in Various InputDocument23 pagesResponse of First Order System in Various InputDonna Joy Mallari100% (1)
- DSP-Lec 2Document28 pagesDSP-Lec 2ngmaherNo ratings yet
- ME361 System PDFDocument7 pagesME361 System PDFAnonymous DuEhOZNo ratings yet
- 4.SDOF Systems in Free VibrationDocument5 pages4.SDOF Systems in Free VibrationshamshiriNo ratings yet
- Chapter 4-2Document12 pagesChapter 4-2Abdalmalek ShamsanNo ratings yet
- Good Question DSPDocument36 pagesGood Question DSPMudit PharasiNo ratings yet
- Open Loop Closed LoopDocument12 pagesOpen Loop Closed LoopKarthik RamNo ratings yet
- Fyp PDFDocument66 pagesFyp PDFAnupam SonarNo ratings yet
- Vibration Lectures Part 1Document71 pagesVibration Lectures Part 1AshokNo ratings yet
- Chapter 4Document14 pagesChapter 4Mï XavierNo ratings yet
- Time Response Analysis of SystemDocument2 pagesTime Response Analysis of SystemJames Lee IlaganNo ratings yet
- Second Order Unit Step Response 1. Unit Step Response: H 1 N 2 N NDocument4 pagesSecond Order Unit Step Response 1. Unit Step Response: H 1 N 2 N NTushar GuptaNo ratings yet
- PolyPhysStat-chapitre 4Document8 pagesPolyPhysStat-chapitre 4Kathérine JosephNo ratings yet
- Unit 1Document69 pagesUnit 1SivaKumar AnandanNo ratings yet
- Lecture 9: Brief Summary of Digital Signal Processing.: 1.1 OperationsDocument15 pagesLecture 9: Brief Summary of Digital Signal Processing.: 1.1 OperationsAce SilvestreNo ratings yet
- Lecture 13Document41 pagesLecture 13Mohamad AsrulNo ratings yet
- Lecture 6 Response To General Dynamic Loading and Transient ResponseDocument8 pagesLecture 6 Response To General Dynamic Loading and Transient ResponseNikesh Raj TulsibakhyoNo ratings yet
- Forced Vibrations: K KX CX F XDocument178 pagesForced Vibrations: K KX CX F XGhanshyam Barhate100% (2)
- Transient Vibration Is Defined As A Temporarily Sustained Vibration of ADocument6 pagesTransient Vibration Is Defined As A Temporarily Sustained Vibration of AsdfohfsioHNo ratings yet
- An Improved Recursive Formula For Calculating Shock Response Spectra-SRS-SmallwoodDocument7 pagesAn Improved Recursive Formula For Calculating Shock Response Spectra-SRS-SmallwoodjackNo ratings yet
- Continuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinDocument24 pagesContinuous-Time Systems: Dept. of Electrical and Computer Engineering The University of Texas at AustinIr Wn IkaarinaNo ratings yet
- Unit Impulse FuncDocument5 pagesUnit Impulse FuncMansi ShahNo ratings yet
- MCG4308 Lec4Document25 pagesMCG4308 Lec4Christian PaultreNo ratings yet
- Fourier TransformDocument21 pagesFourier TransformPrudvi RajNo ratings yet
- General Forced Vibration 1Document18 pagesGeneral Forced Vibration 1Cynthia SimonNo ratings yet
- 6 - Time Response Analysis 2Document21 pages6 - Time Response Analysis 2حساب ويندوزNo ratings yet
- Transient & Steady State Response AnalysisDocument46 pagesTransient & Steady State Response AnalysisSwati AgarwalNo ratings yet
- Overview Lecture 1: Anders Rantzer and Giacomo ComoDocument6 pagesOverview Lecture 1: Anders Rantzer and Giacomo Comohmalikn7581No ratings yet
- DynamicDocument2 pagesDynamicrazvan.curtean5992No ratings yet
- Dynamics of StructuresDocument1 pageDynamics of StructuresTenu Sara ThomasNo ratings yet
- Control Systems AssignmentDocument10 pagesControl Systems AssignmentBrightNo ratings yet
- Serv - Chula.ac - TH Pphongsa Teaching Vibration Ch3Document95 pagesServ - Chula.ac - TH Pphongsa Teaching Vibration Ch3Puneet BahriNo ratings yet
- CH 3Document95 pagesCH 3Taher Abu SeirNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- NimeshDocument1 pageNimeshTanay ChoudharyNo ratings yet
- Data MiningDocument6 pagesData MiningTanay ChoudharyNo ratings yet
- Mon Tue Wed Thru Fri Sat Mehta Stocks: Target 1 LakhDocument6 pagesMon Tue Wed Thru Fri Sat Mehta Stocks: Target 1 LakhTanay ChoudharyNo ratings yet
- FoodworldDocument38 pagesFoodworldTanay ChoudharyNo ratings yet
- Code Category Sub Category Product Name Brand QuantityDocument3 pagesCode Category Sub Category Product Name Brand QuantityTanay ChoudharyNo ratings yet
- William Henry "Bill" GatesDocument11 pagesWilliam Henry "Bill" GatesTanay ChoudharyNo ratings yet
- Arya A.P. Introduction To Classical Mechanics (2ed., PH, 199Document718 pagesArya A.P. Introduction To Classical Mechanics (2ed., PH, 199andifisika100% (4)
- 27.3.8 - Forced VibrationsDocument31 pages27.3.8 - Forced Vibrationsanon_422073337No ratings yet
- Lesson 1 Oscillations V 2023Document13 pagesLesson 1 Oscillations V 2023ANGELA DE LEONNo ratings yet
- B.tech Assignment Question (.)Document4 pagesB.tech Assignment Question (.)spartan7854No ratings yet
- Power System Stability - PalDocument378 pagesPower System Stability - Palsparksmith2000100% (1)
- Brochure Material Properties and Impact Insulation ENDocument8 pagesBrochure Material Properties and Impact Insulation ENRade PesteracNo ratings yet
- NEET Test Series 5Document24 pagesNEET Test Series 5Willis ChekovNo ratings yet
- Engineering Vibrations - Inman - Chapter 1 ProblemsDocument14 pagesEngineering Vibrations - Inman - Chapter 1 ProblemsAhmed Eed0% (1)
- IOE Syllabus (Civil-4th Year)Document98 pagesIOE Syllabus (Civil-4th Year)SibeshKumarSingh100% (7)
- Assignment 2Document4 pagesAssignment 2AkhilNo ratings yet
- Forced Vibration of Two Degrees of Freedom SystemDocument4 pagesForced Vibration of Two Degrees of Freedom Systemsethu sharanyaNo ratings yet
- CBR OptikDocument8 pagesCBR OptikNuriyaniNo ratings yet
- Vibration AnalysisDocument18 pagesVibration AnalysisSangolla NarahariNo ratings yet
- Simple Harmonic MotionDocument41 pagesSimple Harmonic MotionHui JingNo ratings yet
- Theory of VibrationDocument30 pagesTheory of VibrationCharles OndiekiNo ratings yet
- AcusticaDocument81 pagesAcusticaKatiuska SolsolarNo ratings yet
- Mid QuestionDocument1 pageMid QuestionMd. Imran AhmedNo ratings yet
- Lead &lag CompensatorsDocument17 pagesLead &lag CompensatorsAkhil Gorla100% (1)
- 960 Physics (PPU - STPM) Semester 3 Topics-SyllabusDocument8 pages960 Physics (PPU - STPM) Semester 3 Topics-SyllabusJosh, LRTNo ratings yet
- Me 2015-3Document39 pagesMe 2015-3sreekanthaNo ratings yet
- Understanding Reading Bode PlotsDocument12 pagesUnderstanding Reading Bode PlotskenNo ratings yet
- CH 6 TestDocument84 pagesCH 6 TestTony AdeosunNo ratings yet
- Fundamentals of VibrationDocument102 pagesFundamentals of VibrationKoteswara RaoNo ratings yet
- ATC 83 PresentationDocument38 pagesATC 83 PresentationSri KalyanNo ratings yet
- Chapter 16 - Structural Dynamics: Learning ObjectivesDocument80 pagesChapter 16 - Structural Dynamics: Learning ObjectivesadamNo ratings yet
- Lecture Slides Chapter 1 VENKATADocument39 pagesLecture Slides Chapter 1 VENKATAMeng FengNo ratings yet
- Introduction To Differential Equations - Ryan Lok-Wing PangDocument41 pagesIntroduction To Differential Equations - Ryan Lok-Wing PangPang Lok WingNo ratings yet
- Part 2 of 5Document8 pagesPart 2 of 5mick.pride81No ratings yet
- The Effects of System Extension On Inter-Area OscillationsDocument2 pagesThe Effects of System Extension On Inter-Area Oscillationsrodrigo_trentiniNo ratings yet
- Lecture 5. FDM - FlacDocument24 pagesLecture 5. FDM - FlacRui BarreirosNo ratings yet