You might also like
- Generator pre-commissioning checksDocument1 pageGenerator pre-commissioning checksDhaval Patel0% (1)
- Designing A Simple 50 kVADocument20 pagesDesigning A Simple 50 kVABrett HendricksNo ratings yet
- Write The Three KCL Equations and One Dependent Source Equation Needed To Solve For Node Voltages V1Document1 pageWrite The Three KCL Equations and One Dependent Source Equation Needed To Solve For Node Voltages V1Brett HendricksNo ratings yet
- Geometrical DataDocument1 pageGeometrical DataBrett HendricksNo ratings yet
- RZ 05 - EE394J - 2 - Spring11 - Phasor - Time - Domain - PlotsDocument1 pageRZ 05 - EE394J - 2 - Spring11 - Phasor - Time - Domain - PlotsBrett HendricksNo ratings yet
- 32kv Auto Recloser Vacuum Outdoor Circuit Breaker ZW20Document1 page32kv Auto Recloser Vacuum Outdoor Circuit Breaker ZW20Brett HendricksNo ratings yet
- Maximum Power Transfer Theorem Explained - Find Optimal Load Resistance RL for Max Power TransferDocument1 pageMaximum Power Transfer Theorem Explained - Find Optimal Load Resistance RL for Max Power TransferBrett HendricksNo ratings yet
- Z-Base Case. One Circuit Per Corridor. Y Matrix Analysis.: What Planning Can You Do With Y Matrix?Document2 pagesZ-Base Case. One Circuit Per Corridor. Y Matrix Analysis.: What Planning Can You Do With Y Matrix?Brett HendricksNo ratings yet
- TheDocument1 pageTheBrett HendricksNo ratings yet
- Z-Voltage Stability AnalysisDocument1 pageZ-Voltage Stability AnalysisBrett HendricksNo ratings yet
- Background InformationDocument1 pageBackground InformationBrett HendricksNo ratings yet
- Calculating & Checking Fault Currents in Omiš Distribution NetworkDocument1 pageCalculating & Checking Fault Currents in Omiš Distribution NetworkBrett HendricksNo ratings yet
- Power To The DeltaDocument1 pagePower To The DeltaBrett HendricksNo ratings yet
- Transformer OptimisationDocument1 pageTransformer OptimisationBrett HendricksNo ratings yet
- Pick Up Current of Relay-1Document2 pagesPick Up Current of Relay-1Brett HendricksNo ratings yet
- NI 9225 voltage measurement safetyDocument1 pageNI 9225 voltage measurement safetyBrett HendricksNo ratings yet
- Nerator Protection Systems Are Very Complex Systems With Many Different Protective FunctionsDocument7 pagesNerator Protection Systems Are Very Complex Systems With Many Different Protective FunctionsBrett HendricksNo ratings yet
- Proj. E. I 17 Selecting The Right RCDDocument1 pageProj. E. I 17 Selecting The Right RCDBrett HendricksNo ratings yet
- R.Z.-400kV 400kV Rishikesh Line Protection: D) RXEG - 27P - Under Voltage Protection RelayDocument1 pageR.Z.-400kV 400kV Rishikesh Line Protection: D) RXEG - 27P - Under Voltage Protection RelayBrett HendricksNo ratings yet
- Relay Setting CalculationDocument3 pagesRelay Setting CalculationSamarendu Baul90% (29)
- Grounding Standards PDFDocument15 pagesGrounding Standards PDFBrett HendricksNo ratings yet
- SIP5 APN 029 - Ground Fault Supervision of 4 Feeders - en PDFDocument10 pagesSIP5 APN 029 - Ground Fault Supervision of 4 Feeders - en PDFBrett HendricksNo ratings yet
- Powercad UputeDocument74 pagesPowercad UputeElmir Huseinbasic100% (1)
- Procjena Proizvodnje PVGIS Za 10kW Za Zagreb PDFDocument2 pagesProcjena Proizvodnje PVGIS Za 10kW Za Zagreb PDFBrett HendricksNo ratings yet
- The A To Z of RCDsDocument4 pagesThe A To Z of RCDsBrett HendricksNo ratings yet
- K 61512784 E8Document2 pagesK 61512784 E8Brett HendricksNo ratings yet
- Assessment of Negative Sequence Currents For Generators Connected To 345-kV Asymmetrical Transmission Lines From Measurement DataDocument10 pagesAssessment of Negative Sequence Currents For Generators Connected To 345-kV Asymmetrical Transmission Lines From Measurement DataBrett HendricksNo ratings yet
- Lightning ProtectionDocument5 pagesLightning ProtectionMahananda SahariaNo ratings yet
- Electrolux Washing Machine Wiring Diagram Service Manual Error Code Circuit Schematic Schema Repair Instruction Guide User Manual Free PDF Download PDFDocument8 pagesElectrolux Washing Machine Wiring Diagram Service Manual Error Code Circuit Schematic Schema Repair Instruction Guide User Manual Free PDF Download PDFBrett HendricksNo ratings yet
- 2010 - 7!10!2174 - 2182-Modeling and Calculation Analysis of Torsional VibrationDocument9 pages2010 - 7!10!2174 - 2182-Modeling and Calculation Analysis of Torsional VibrationRavi Kumar Somepalli100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Qpro 1 ENGLS 150401 PDFDocument20 pagesQpro 1 ENGLS 150401 PDFZR Textiles75% (8)
- Transformers 1Document5 pagesTransformers 1Shubhangi SinghNo ratings yet
- Incorporation of RESDocument8 pagesIncorporation of RESAshokNo ratings yet
- ELSGS01Document13 pagesELSGS01Ariel Anibal AparicioNo ratings yet
- As 60269.2.1-2005 Low-Voltage Fuses - Supplementary Requirements For Fuses For Use by Authorized Persons (FusDocument12 pagesAs 60269.2.1-2005 Low-Voltage Fuses - Supplementary Requirements For Fuses For Use by Authorized Persons (FusSAI Global - APACNo ratings yet
- Cop e 2015Document356 pagesCop e 2015ZiyadDohaNo ratings yet
- Lab #3: Linear Voltage Regulators: GoalsDocument15 pagesLab #3: Linear Voltage Regulators: GoalsManuel EmmanuelNo ratings yet
- Electrical Standards and Practices PART 1 PECDocument16 pagesElectrical Standards and Practices PART 1 PECCASTRO, JANELLA T.No ratings yet
- Frontier Error Codes PDFDocument2 pagesFrontier Error Codes PDFKing100% (1)
- Tunisie CableDocument155 pagesTunisie CableSoltani AliNo ratings yet
- Manual KW903 SP Iss 04Document21 pagesManual KW903 SP Iss 04Ranjeet singhNo ratings yet
- SC DIY CDI Article HiresDocument17 pagesSC DIY CDI Article HiresChuck Gavagan100% (2)
- Experiment No: 4 Characteristics of Welding TransformerDocument5 pagesExperiment No: 4 Characteristics of Welding TransformerKunal TanwarNo ratings yet
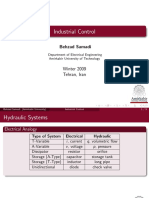
- Industrial Control Systems - 04 HydraulicsDocument18 pagesIndustrial Control Systems - 04 HydraulicsBehzad SamadiNo ratings yet
- Tutorial 2Document2 pagesTutorial 2AbhinavJain100% (1)
- APTRANSCO Line Crossing RequestDocument21 pagesAPTRANSCO Line Crossing Requests.thrinadhrao0% (1)
- Earth Leakage Relays: Do You Also Need?Document10 pagesEarth Leakage Relays: Do You Also Need?iskandarismailNo ratings yet
- VaristorsDocument11 pagesVaristorsBrianHazeNo ratings yet
- MiroMax HPM 10000 (72V) Test ReportDocument2 pagesMiroMax HPM 10000 (72V) Test ReportakseerNo ratings yet
- Pulse March2011Document12 pagesPulse March2011kotwalNo ratings yet
- ENA ER G81 Part 2 Issue 1 Amendment 1 080109Document14 pagesENA ER G81 Part 2 Issue 1 Amendment 1 080109Aamir ShahzadNo ratings yet
- GRB100 Rev3Document0 pagesGRB100 Rev3comportNo ratings yet
- 7805T Ecg-960Document2 pages7805T Ecg-960bellscbNo ratings yet
- C Audio SR707 SchematicsDocument4 pagesC Audio SR707 SchematicsBNo ratings yet
- EPE Courses Bolona - 1st, 2nd & 3rd StageDocument6 pagesEPE Courses Bolona - 1st, 2nd & 3rd StageMohamed A. HusseinNo ratings yet
- Introduction to Bangladesh's Power Transmission Network and Role of PGCBDocument58 pagesIntroduction to Bangladesh's Power Transmission Network and Role of PGCBAgargaon 230KV Grid100% (1)
- Phasor Diagram of Transformer On Inductive LoadDocument1 pagePhasor Diagram of Transformer On Inductive LoadRema JayNo ratings yet
- Emerson DCSDocument27 pagesEmerson DCSSrikar Reddy GummadiNo ratings yet
- Catalogo Hubbell InsulgripDocument12 pagesCatalogo Hubbell InsulgripLily ParadaNo ratings yet