You might also like
- Financial Action Task Force On Money Laundering: Annual Report 1996-1997Document91 pagesFinancial Action Task Force On Money Laundering: Annual Report 1996-1997jejudoNo ratings yet
- Working Paper: Electronic Money by Barbara A. GoodDocument72 pagesWorking Paper: Electronic Money by Barbara A. GoodjejudoNo ratings yet
- W 22533Document65 pagesW 22533jejudoNo ratings yet
- Money: Everyday EconomicsDocument20 pagesMoney: Everyday Economicshello1 youNo ratings yet
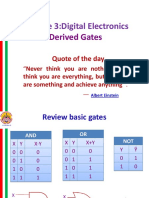
- Module 3:digital Electronics: Derived GatesDocument21 pagesModule 3:digital Electronics: Derived GatesjejudoNo ratings yet
- RM 12Document1,098 pagesRM 12Luis Rodriguez100% (1)
- Faculty Moodle ManualDocument48 pagesFaculty Moodle Manualdiamond5000No ratings yet
- Ideal Money and Asymptotically Ideal MoneyDocument8 pagesIdeal Money and Asymptotically Ideal MoneySteven EdwardsNo ratings yet
- Money ManagementDocument39 pagesMoney ManagementLouie F. Ramirez IINo ratings yet
- OECD - Future of MoneyDocument171 pagesOECD - Future of Money이영래No ratings yet
- Prevalence of Selfie Addiction Among Junior College StudentsDocument4 pagesPrevalence of Selfie Addiction Among Junior College StudentsjejudoNo ratings yet
- Enhancements On The Hyperplanes Arrangements in Mixed-Integer Programming TechniquesDocument24 pagesEnhancements On The Hyperplanes Arrangements in Mixed-Integer Programming TechniquesjejudoNo ratings yet
- Ug 12Document232 pagesUg 12Luis RodriguezNo ratings yet
- PHYS 1100 DC Circuits SolutionsDocument14 pagesPHYS 1100 DC Circuits SolutionsYihun TsegayeNo ratings yet
- Electric, Electrical, or ElectronicDocument3 pagesElectric, Electrical, or ElectronicjejudoNo ratings yet
- Enhancements On The Hyperplane Arrangements in Mixed Integer TechniquesDocument6 pagesEnhancements On The Hyperplane Arrangements in Mixed Integer TechniquesjejudoNo ratings yet
- Predictive Control For Tight Group Formation of Multi-Agent SystemsDocument6 pagesPredictive Control For Tight Group Formation of Multi-Agent SystemsjejudoNo ratings yet
- On The Tight Formation For Multi-Agent Dynamical SystemsDocument12 pagesOn The Tight Formation For Multi-Agent Dynamical SystemsjejudoNo ratings yet
- On The Hyperplanes Arrangements in Mixed-Integer TechniquesDocument6 pagesOn The Hyperplanes Arrangements in Mixed-Integer TechniquesjejudoNo ratings yet
- A Sonar Approach To Obstacle Detection For A Vision-Based Autonomous WheelchairDocument15 pagesA Sonar Approach To Obstacle Detection For A Vision-Based Autonomous WheelchairjejudoNo ratings yet
- SVE14A37CXHDocument2 pagesSVE14A37CXHjejudoNo ratings yet
- Path Following With Collision Avoidance and Velocity Constraints For Multi-Agent SystemsDocument6 pagesPath Following With Collision Avoidance and Velocity Constraints For Multi-Agent SystemsjejudoNo ratings yet
- Self-Localization Using Sporadic FeaturesDocument9 pagesSelf-Localization Using Sporadic FeaturesjejudoNo ratings yet
- Following A Wall by An Autonomous Mobile Robot With A Sonar-RingDocument8 pagesFollowing A Wall by An Autonomous Mobile Robot With A Sonar-RingjejudoNo ratings yet
- Matlab Tutorial1Document9 pagesMatlab Tutorial1Asterix100% (6)
- Mux CD4052Document14 pagesMux CD4052neonavNo ratings yet
- Software PID Control of An Inverted Pendulum Using The PIC16F684Document14 pagesSoftware PID Control of An Inverted Pendulum Using The PIC16F684Antony Charles TejadaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Jeff Heaton-Artificial Intelligence For Humans, Volume 3 - Deep Learning and Neural Networks-CreateSpace Independent Publishing Platform (2015)Document268 pagesJeff Heaton-Artificial Intelligence For Humans, Volume 3 - Deep Learning and Neural Networks-CreateSpace Independent Publishing Platform (2015)Adriano CarafiniNo ratings yet
- ANN and Power SystemDocument37 pagesANN and Power SystemAnonymous C9ZNFkrb6No ratings yet
- How AI Is Impacting Physical Access ControlDocument11 pagesHow AI Is Impacting Physical Access ControlSheldon GabrielNo ratings yet
- Artificial Intelligence Full Guide PDFDocument661 pagesArtificial Intelligence Full Guide PDFNalin GoswamiNo ratings yet
- Creating Optical Character Recognition (OCR) Applications Using Neural Networks - CodeProjectDocument7 pagesCreating Optical Character Recognition (OCR) Applications Using Neural Networks - CodeProjectSargunam SankaravadivelNo ratings yet
- Detect Apple & Tomato Leaf Diseases with Deep LearningDocument89 pagesDetect Apple & Tomato Leaf Diseases with Deep LearningVINOD DNo ratings yet
- Stock Market Analysis 0th ReviewDocument27 pagesStock Market Analysis 0th ReviewVijji VijayNo ratings yet
- Solving Flows of Dynamical Systems by Deep Neural Networks and A Novel Deep Learning AlgorithmDocument12 pagesSolving Flows of Dynamical Systems by Deep Neural Networks and A Novel Deep Learning AlgorithmERMA ERMANo ratings yet
- Automatic Differentiation and Neural NetworksDocument13 pagesAutomatic Differentiation and Neural NetworksHarsh Vardhan DubeyNo ratings yet
- Data Mining Database Perspective Parallel Computing IntegrationDocument19 pagesData Mining Database Perspective Parallel Computing IntegrationSijo JohnNo ratings yet
- Fitting Neural Network ModelsDocument9 pagesFitting Neural Network ModelsArpan KumarNo ratings yet
- Data MiningDocument14 pagesData MiningAnkit GuptaNo ratings yet
- Aplicación de La Inteligencia Artificial en La Industria Alimentaria - Una GuíaDocument42 pagesAplicación de La Inteligencia Artificial en La Industria Alimentaria - Una GuíaPatty HMNo ratings yet
- Comparison of Short-Term Rainfall Prediction Models For Real-Time Flood ForecastingDocument16 pagesComparison of Short-Term Rainfall Prediction Models For Real-Time Flood ForecastingukoszapavlinjeNo ratings yet
- Class 1 XDocument18 pagesClass 1 XRonak PanchalNo ratings yet
- Neural Networks: Aroob Amjad FarrukhDocument6 pagesNeural Networks: Aroob Amjad FarrukhAroob amjadNo ratings yet
- Plant Disease Detection and Classification Using Deep LearningDocument8 pagesPlant Disease Detection and Classification Using Deep LearningIJRASETPublicationsNo ratings yet
- MCA III Year I SemesterDocument12 pagesMCA III Year I SemesterIan HughesNo ratings yet
- Neuro-Fuzzy Programming To Finding Fuzzy Multiple Objective Linear Programming ProblemsDocument6 pagesNeuro-Fuzzy Programming To Finding Fuzzy Multiple Objective Linear Programming ProblemsInternational Journal of Innovative Science and Research Technology100% (1)
- (Berg, Jens, and Kaj Nystrom), Data-Driven Discovery of PDEs in Complex Datasets, Journal of Computational Physics 384 (2019)Document14 pages(Berg, Jens, and Kaj Nystrom), Data-Driven Discovery of PDEs in Complex Datasets, Journal of Computational Physics 384 (2019)Aman JalanNo ratings yet
- Multivariate Time Series Classification of Sensor Data From An inDocument101 pagesMultivariate Time Series Classification of Sensor Data From An inSaba SuhailNo ratings yet
- ML Terminologies PDFDocument44 pagesML Terminologies PDFKapildev KumarNo ratings yet
- Artificial Intelligence Construction Technologys Next FrontierDocument8 pagesArtificial Intelligence Construction Technologys Next FrontierMV0% (1)
- Successful Prediction of Horse Racing Results Using A Neural Network PDFDocument7 pagesSuccessful Prediction of Horse Racing Results Using A Neural Network PDFBartoszSowulNo ratings yet
- What 20is 20ChatGPT 20doing 20 20and 20why 20does 20it 20workDocument109 pagesWhat 20is 20ChatGPT 20doing 20 20and 20why 20does 20it 20workeder rodriguesNo ratings yet
- Real Estate Properties Assessment Using Deep Neural NetworkDocument8 pagesReal Estate Properties Assessment Using Deep Neural NetworkMANTECH PublicationsNo ratings yet
- Deep Learning With TensorflowDocument50 pagesDeep Learning With TensorflowMuhammad Zaka Ud DinNo ratings yet
- Nori Navya - Georgia Hosa Research Poster Question1 1Document1 pageNori Navya - Georgia Hosa Research Poster Question1 1api-687476683No ratings yet
- Dhiraj Report1Document25 pagesDhiraj Report1nimbalkarDHIRAJNo ratings yet
- A Proposal For The A.IDocument3 pagesA Proposal For The A.IMusavi TouqeerNo ratings yet