You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- DLP Science 6 - q1 WK 4 Day 5Document9 pagesDLP Science 6 - q1 WK 4 Day 5Sonny MatiasNo ratings yet
- 1 s2.0 0040603185854484 Main PDFDocument6 pages1 s2.0 0040603185854484 Main PDFShrishma PaikNo ratings yet
- A Combined Use of Optical Microscopy X R PDFDocument11 pagesA Combined Use of Optical Microscopy X R PDFShrishma PaikNo ratings yet
- LV 2008Document4 pagesLV 2008Shrishma PaikNo ratings yet
- Crystal Habit and Phase Attribution of U (Vi) Oxides in A Gelation ProcessDocument7 pagesCrystal Habit and Phase Attribution of U (Vi) Oxides in A Gelation ProcessShrishma PaikNo ratings yet
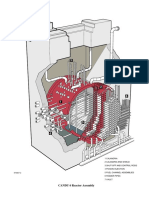
- CANDU6 Reactor Assembly PDFDocument1 pageCANDU6 Reactor Assembly PDFShrishma PaikNo ratings yet
- Ultrasonic Chemical ReactorsDocument4 pagesUltrasonic Chemical ReactorsShrishma PaikNo ratings yet
- Zinc PhosphateDocument10 pagesZinc PhosphateShrishma PaikNo ratings yet
- Physical Properties of Uranium Process Solutions byDocument15 pagesPhysical Properties of Uranium Process Solutions byShrishma PaikNo ratings yet
- Centrifugal PumpsDocument15 pagesCentrifugal PumpsVignaesh SubramaniamNo ratings yet
- Prof. Tankeshwar Kumar: Curriculum VitaeDocument24 pagesProf. Tankeshwar Kumar: Curriculum Vitaerajiv kumarNo ratings yet
- Packing Selection Guide For Packed ColumnsDocument44 pagesPacking Selection Guide For Packed ColumnsZain Ul AbideenNo ratings yet
- 21.AW .DFMD .100-160.R410A.TM .EN .11.19.rev01Document96 pages21.AW .DFMD .100-160.R410A.TM .EN .11.19.rev01Said El GouziNo ratings yet
- BS en 1593-1999 NDT - Leak Testing - Bubble EmissionDocument14 pagesBS en 1593-1999 NDT - Leak Testing - Bubble Emissionrinshad100% (1)
- Laboratory Activity 1 - Specific Gravity Demonstration-CE31 - S5 - AMADOR - RUSELLE - JOHNDocument11 pagesLaboratory Activity 1 - Specific Gravity Demonstration-CE31 - S5 - AMADOR - RUSELLE - JOHNALDRIN JUSTADONo ratings yet
- Going Fishing: Lesson PlanDocument6 pagesGoing Fishing: Lesson Planforod91100mxclipcomNo ratings yet
- Tank Blanketing ApplicationsDocument5 pagesTank Blanketing ApplicationsMurali MuthuNo ratings yet
- Uncertainty Calculation Module DetailsDocument13 pagesUncertainty Calculation Module Detailsprobity2001-2No ratings yet
- R6315 PDFDocument2 pagesR6315 PDFKasnowo DiponegoroNo ratings yet
- PDS-PC 80m-EnDocument2 pagesPDS-PC 80m-EnJaiNo ratings yet
- Ultrasonics - Sonochemistry: SciencedirectDocument11 pagesUltrasonics - Sonochemistry: SciencedirectLeni LismayantiNo ratings yet
- General Information: Section 1Document11 pagesGeneral Information: Section 1ShaarawyNo ratings yet
- Dropwise CondensationDocument14 pagesDropwise CondensationMohd Taufik TaibNo ratings yet
- Test 1Document5 pagesTest 1Racquel LallieNo ratings yet
- Catalog Advanced RocksDocument81 pagesCatalog Advanced RocksDarya Khan BhuttoNo ratings yet
- 2 - Properties of Natural Gas and Condensate SyetemsDocument80 pages2 - Properties of Natural Gas and Condensate SyetemsHashem HashemNo ratings yet
- Teacher Packs in Experimental Science: CHE Pack 2Document8 pagesTeacher Packs in Experimental Science: CHE Pack 2Tol AdoNo ratings yet
- International Journal of Thermal Sciences: Massimo CorcioneDocument11 pagesInternational Journal of Thermal Sciences: Massimo CorcioneParvez AhmedNo ratings yet
- Chemistry SS2 First TermDocument6 pagesChemistry SS2 First TermKel FelixNo ratings yet
- OCP ACF Reference Design Guidance White PaperDocument27 pagesOCP ACF Reference Design Guidance White PapermasonmcpikeNo ratings yet
- Chemistry Eportfolio PaperDocument4 pagesChemistry Eportfolio Paperapi-301500945No ratings yet
- Pump SizingDocument9 pagesPump SizingNam Vu Tran67% (3)
- CryogenicLiquidGuidelines PDFDocument15 pagesCryogenicLiquidGuidelines PDFMichel LopezNo ratings yet
- Thermal MCQDocument42 pagesThermal MCQRanjeet KumarNo ratings yet
- Solution, Solubility & Gas LawsDocument5 pagesSolution, Solubility & Gas LawsSabbir HossainNo ratings yet
- User Manual Eck3900 Premium (Manuk4z.0b0) Ed.11 Ver.1.33 Sw.1.84Document1,026 pagesUser Manual Eck3900 Premium (Manuk4z.0b0) Ed.11 Ver.1.33 Sw.1.84KEYZORNo ratings yet
- Clariant Antistatic AgentsDocument20 pagesClariant Antistatic AgentsJose Bustos100% (1)
- Chapter 1Document11 pagesChapter 1Deepak MahapatraNo ratings yet
- Apltcl025 SGD L 01 Hydraulic Fundamental2Document106 pagesApltcl025 SGD L 01 Hydraulic Fundamental2Eren Melik Sürmeli100% (1)