Professional Documents
Culture Documents
Relatório
Uploaded by
jonataspulz0 ratings0% found this document useful (0 votes)
97 views43 pagesCopyright
© Attribution Non-Commercial (BY-NC)
Available Formats
DOCX, PDF, TXT or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Attribution Non-Commercial (BY-NC)
Available Formats
Download as DOCX, PDF, TXT or read online from Scribd
0 ratings0% found this document useful (0 votes)
97 views43 pagesRelatório
Uploaded by
jonataspulzCopyright:
Attribution Non-Commercial (BY-NC)
Available Formats
Download as DOCX, PDF, TXT or read online from Scribd
You are on page 1of 43
ESCOLA POLITCNICA DA UNIVERSIDADE DE SO PAULO
PSI 2327 Eletrnica Experimental II
Projeto: Carrinho eletrnico auto-guiado
Rafael Menegazzi 7210783
Jonatas Pulz 7210355
Matheus Moreira Beltrame 7209395
Turma 03
Professores: Marco Isaas Alayo Chvez
Jos Vieira do Vale Neto
Data de entrega 09/11/2012
Projeto Carrinho auto-guiado Pgina 1
Sumrio
Resumo ................................................................................................................................................................. 2
I. Objetivo ........................................................................................................................................................ 2
II. Detalhamento do Projeto ............................................................................................................................. 2
Circuito de reconhecimento da linha ............................................................................................................... 3
Circuito PWM e pr-projeto do carrinho ......................................................................................................... 5
Projeto final ...................................................................................................................................................... 8
Diagrama de Blocos ................................................................................................................................... 10
Montagem do carrinho .............................................................................................................................. 11
III. Clculos ................................................................................................................................................... 13
Reconhecimento de linha ............................................................................................................................... 13
Pre-projeto ..................................................................................................................................................... 14
Projeto final .................................................................................................................................................... 14
IV. Testes...................................................................................................................................................... 15
Circuito dos sensores ..................................................................................................................................... 15
Pre-Projeto ..................................................................................................................................................... 15
Projeto final .................................................................................................................................................... 15
V. Oramento .............................................................................................................................................. 16
VI. Concluso ............................................................................................................................................... 16
Referncias Bibliogrficas ................................................................................................................................... 16
Anexos ................................................................................................................................................................ 17
1 Anexo. Datasheet fotodiodo .............................................................................................................. 17
2 Anexo. Diagrama sensor da linha ....................................................................................................... 22
3 Anexo. Layout sensor da linha ........................................................................................................... 22
4 Anexo. Datasheet transistor de potncia ........................................................................................... 23
5 Anexo. Datasheet 555 ........................................................................................................................ 26
6 Anexo. Diagrama circuito conjunto sensor + PWM ........................................................................... 30
7 Anexo. Layout circuito conjunto sensor + PWM ................................................................................ 30
8 Anexo. Diagrama do projeto final, exceto sensores vide 42Anexo. Circuito e layout de
comparadores dos sensores ......................................................................................................................................... 31
9 Anexo. Layout projeto final ................................................................................................................ 32
10 Anexo. Datasheet L298, ponte-H dupla ............................................................................................. 33
11 Anexo.LF353, amp-op duplo .............................................................................................................. 37
12 Anexo. Datasheet 7805, regulador de tenso .................................................................................... 40
13. Anexo. Circuito e layout de comparadores dos sensores .................................................................. 42
Projeto Carrinho auto-guiado Pgina 2
Resumo
Na disciplina PSI2327, alm das experincias realizadas, existe o projeto de construo de
um carrinho doravante entenda carrinho como um mini-carro, porm com propulso a partir de
motores eltricos, e circuitos de controle totalmente eletrnicos que seja capaz de, sem
nenhuma interveno por parte de algum operador externo, percorrer uma trajetria fechada um
desenho de uma linha de pequena distncia.
Abaixo se encontra um exemplo de trajetria que deve ser percorrida pelo carrinho:
Figura 1. Exemplo de trajetria que deve ser percorrida pelo carrinho
No presente projeto, a trajetria que dever ser percorrida contnua, e sem cruzamentos.
Como forma de incentivo, existe vrios grupos que tambm devem construir carrinhos, e aquele
que percorrer o circuito fechado no menor tempo possvel receber uma melhor nota.
I. Objetivo
O objetivos do projeto desenvolver nos alunos as seguintes habilidades:
- Trabalho em equipe;
- Habilidade prtica com circuitos eletrnicos;
- Familiarizao com CIs comercias e seus datasheets;
- E obviamente, como ponto alvo, a construo de um carrinho auto-guiado que seja
capaz de seguir um circuito fechado no menor tempo possvel.
J o presente relatrio tem como objetivo apresentar o ponto alvo do projeto, as vrias
possveis solues ponderadas, e detalhar a soluo implementada fisicamente pelo grupo.
II. Detalhamento do Projeto
Todos os grupos deveriam obrigatoriamente construir um carrinho com as seguintes
caractersticas:
- Utilizar dois motores padro 6V;
- Utilizar no carrinho um chassi de dimenses e material padro;
- Utilizar rodas padro.
Alm disso a pista o traado da linha no teria descontinuidades nem cruzamentos, e o
carrinho no necessita parar depois de completada uma volta.
Projeto Carrinho auto-guiado Pgina 3
Figura 2. Exemplo de trajetria para o carrinho
Como pode ser visto pela Figura 2, o carrinho dever seguir um linha preta numa grande
plataforma branca, para isto sero necessrios sensores para detectar a linha e circuito
controladores de velocidade para que o carrinho vire, pare, ande, quando necessrio. Vide Figura
3.
Figura 3. Diagrama de blocos geral do carrinho
Para que os alunos fossem forados a completar o projeto, foi definido que deveriam ser
entregues pr-projetos, sendo estes os seguintes:
1. Um circuito que reconhecesse a posio da linha que deve ser seguida;
2. Um circuito que controlasse a velocidade do motor e que conseguisse acompanhar
pequenas mudanas de direo da linha.
A seguir sero detalhados os projetos de cada uma dessas partes.
Circuito de reconhecimento da linha
Inicialmente para implementao desse projeto, deveria ser escolhido um tipo de sensor
que obviamente utilizasse uma radiao, de modo que no sofresse tanto os efeitos da luz do
ambiente. Tambm deveria ser utilizado um tipo de comparador ou Schmitt-trigger, para que,
depois de definido um limiar de tenso, a sada fosse um nvel lgico, para facilitar a comunicao
com outras partes do controle do carrinho.
Essa parte do projeto se baseia na reflexo das ondas eletromagnticas. Uma superfcie
preta, mesmo para comprimentos de onda um pouco fora do espectro visvel, pode refletir quase
Projeto Carrinho auto-guiado Pgina 4
nenhuma porcentagem das ondas incidentes, j uma superfcie branca, mesma ressalva anterior,
consegue refletir grande parte das ondas incidentes.
Ento basicamente, existe um emissor de ondas infravermelhas, essas ondas so
refletidas ou no por uma superfcie contraposta, e o sensor excitado por essas ondas que
foram refletidas, gerando assim eltrons livres, suficientes ou no para gerar uma corrente que ir
polarizar um circuito com um nvel de tenso que depois ser comparado com uma referncia.
Figura 4. Sensibilidade dos sensores, por tipo em funo do comprimento de onda
Na Figura 4 v-se que, de forma geral, os sensores disponveis no mercado, tm maior
sensibilidade ao infravermelho, e por isso o LED escolhido como fonte luminosa foi um
infravermelho ( 700nm > ). Apesar de a radiao solar conter elementos nessa faixa de
freqncias, ainda assim de menor intensidade que o espectro visvel, e tendo uma grande
radincia por parte do LED, a interferncia do sol poder ser desprezvel.
Figura 5. Relao tensoXcorrente tpica de um foto sensor
Pela Figura 5, v-se que a regio de interesse para se trabalhar com um foto sensor a
regio de polarizao reversa. Pois a partir do momento que fornecido uma determinada
potncia ao sensor, suficiente para gerar a corrente
p
I , a tenso que aparecer para uma
potncia maior ser praticamente constante, e para uma potncia menor ser praticamente zero.
A seguir ento segue o circuito de polarizao para o sensor e para o LED.
Projeto Carrinho auto-guiado Pgina 5
Figura 6. Circuito de polarizao do sensor e emissor
Como pode ser visto pela Figura 6, a polarizao do diodo consiste do LED infravermelho
(parte esquerda do Optoisolator1) e do resistor R1, portanto continuamente o LED estar
fornecendo luz para o sensor dependendo da reflexo da superfcie contraposta. Tendo
intensidade luminosa suficiente no sensor, este ir polarizar o resistor R2, gerando um nvel de
tenso na entrada no-inversora do amp-op U1, que ser comparada com o nvel de tenso
definido pelo potencimetro R3. Assim se houver luz entenda doravante por luz como radiao
infravermelha , ento a tenso no pino 3 do amp-op ter uma tenso maior que o pino 2, e
portanto a sada OUT estar aproximadamente em VCC. Caso contrrio, a tenso em 3 ser
menor que em 2, e a sada estar aproximadamente de GND.
Portanto, quando sobre a linha a sada GND, e quando fora da linha a sada VCC.
Como pode ser visto pelo Anexo. Datasheet fotodiodo, para a corrente de operao tpica do
fotodiodo, a tenso no terminal no-inversor do amp-op varia apenas de aproximadamente 0.3V ,
porm conforme visto pelos testes feitos pelo grupo, isso foi suficiente para verificar a posio da
linha, portanto o potencimetro foi ajustado manualmente para oferecer um bom limiar para a
identificao da trajetria.
Para verificao do diagrama e layout reais vide Anexo. Diagrama sensor da linha e
Anexo. Layout sensor da linha. A nica incrementao foi um regulador de teso de 5V e
tambm importante notar que o LED3 na verdade seria o fotodiodo, foi utilizado um simples LED
para represent-lo pois suas dimenses so idnticas. O LED1 apenas um verificador de
alimentao, o LED2 o emissor infravermelho, e o LED4 o sinalizador de linha.
Circuito PWM e pr-projeto do carrinho
O motor que dever ser utilizado ser um 6V 248RPM com reduo. Infelizmente no se
tem informaes sobre torque e correntes dele, por isso foi difcil verificar se o transistor de
potncia ou a ponte H iria suport-lo. Mas j ser adiantado que nos testes no houve nenhum
problema de superaquecimento ou queima de componente.
Projeto Carrinho auto-guiado Pgina 6
Figura 7. Motor que dever ser utilizado por todos os carrinhos
Para que seja possvel a regulao da velocidade do motor sem que perca torque
excessivamente, deve-se utilizar um modulador de largura de pulso (PWM Pulse Width
Modulator), e no uma simples regulao de tenso.
Figura 8. Modulao por lagura de pulso, PMW (Pulse Width Modulator)
Como pode ser visto pela Figura 8, em vez de controlar a tenso que mandada ao motor,
controla-se o tempo que tenso mxima aplicada ao motor, assim no tempo que a tenso
mandada, tem-se mximo torque, porm na outra parte do perodo do pulso o motor estar
desligado, assim sendo possvel controlar a velocidade mdia do carrinho, desde que a frequncia
desses pulsos seja suficientemente alta para que no sejam perceptveis os trancos no carrinho.
Quanto maior a largura do pulso maior ser a propulso fornecida pelo motor.
Figura 9. Exemplo de PWM que utiliza o circuito 555
Projeto Carrinho auto-guiado Pgina 7
Para implementar o PWM, pode-se utilizar um CI muito conhecido comercialmente, o 555.
Com este CI, constri-se facilmente um oscilador stavel, vide Figura 9. Nessa figura, o 555
funciona como um stavel, com a largura de pulso sendo definida pela posio do potencimetro
de 100k. A sada do 555 pino 3 ligada base de um transistor de potncia que entre em
corte ou saturao, acionando ou desligando o motor. Porm importante notar que quando o
motor desligado, devido a sua inrcia, ele continuar girando e ir atuar como um gerador, pois
o campo magntico fixo no caso do modelo utilizado , portanto para que o transistor de
potncia no queime utilizado um diodo, conectado ao motor do modo exatamente indicado na
figura, para que a tenso gerada pelo motor seja baixa, pois ele ir freiar, pois praticamente
estar curto-circuitado. Alm de todo o detalhamento anterior importante salientar que a
frequncia do pulso do PWM; sendo definida pelos resistores e pelo capacitor ligados aos pinos 2,
6 e 7 do 555; deve ser suficientemente alta para que no seja percebido trancos no carrinho.
No projeto foram utilizados tambm um 555, alm de um transistor de potncia Mosfet,
vide Anexo. Datasheet transistor de potncia, e a sua tenso de limiar tpica 3V, portanto a
sada do 555, vide Anexo. Datasheet 555 , realmente no suficiente para acionar o transistor de
potncia. Porm inicialmente o projeto foi feito assim.
Em verdade, no foi feito apenas um circuito PWM, foram preparados dois circuitos
impressos, contendo o detector de linha e o PWM, um para cada motor. Para detalhamento vide
Anexo. Diagrama circuito conjunto sensor + PWM e Anexo. Layout circuito conjunto sensor +
PWM. A descrio desse circuito o seguinte: tem-se bloco dos sensores mesmo j analisado
anteriormente, com a exceo de que na sada daquele bloco foi colocado um drive: um
transistor que opera no corte e saturao para que a sada excursione entre GND e VCC, pois
como a alimentao do amp-op no est sendo simtrica, em nvel baixo a sada fica em
aproximadamente 1,2V, o que no um nvel TTL 0, para que o 555 reconhea. Portanto a
sada do bloco do sensor ligada ao reset do 555, que est operando como um stavel, com duty
cycle que pode ser controlado pelo potencimetro POT1, e a sada do 555 ligada ao transistor
de potncia que aciona o motor.
Ento ele funciona assim: ao detectar a linha, a corrente no fotodiodo cai, aumentando
assim a tenso no terminal no inversor do amp-op, fazendo com que ele sature em VCC, assim
desligando o LED5 e saturando o transistor de drive. Saturando esse transistor, a entrada do
reset levando a 0, desligando assim o 555 e como conseqncia, desligando o motor. Caso a
linha no seja detectada, o motor estar sendo acionado pelo PWM.
Portanto utilizar-se-o dois motores e duas dessas placas descritas anteriormente, cada
uma para cada motor. Assim cada motor estar sendo ligado e desligado, conforme se
detectada a linha. Logo se a linha detectada direita, o prprio motor da direita deve ser
desligado e vice-versa.
Projeto Carrinho auto-guiado Pgina 8
Figura 10. Esquema mecnico do carrinho
Como pode ser visto na Figura 10, foram colocados os motores de moto oposto, e os
sensores foram posicionados frente distanciados com um pouco mais que a largura da linha.
Tambm foi utilizada uma roda-boba, frente, com o intuito de apenas permitir que o carrinho vire
livremente, dependendo para isso apenas dos motores. Porm essa foto do projeto final, ento
desconsidere os quatro sensores adicionais dois de cada lado vistos na placa dos sensores na
parte de cima da foto.
Concluindo, como explicado anteriormente, para que o carrinho vire sero utilizados dois
motores com acionamento independente, cada um sendo controlado por um sensor, desligando e
ligando conforme o sensor detecta a linha ou no. Tambm ser possvel, atravs do PWM,
controlar a velocidade de cada um dos motores independentemente, para que o tempo de
resposta da inrcia do carrinho seja suficiente para que ele no saia da trajetria.
Projeto final
Como ser visto na seo de testes, o modelo detalhado anteriormente, no obteve bons
resultados, primeiramente porque o transistor de potncia no estava respondendo bem, e porque
um simples on off dos motores no funcionou tambm o quanto era esperado.
Por isso resolveu-se fazer as seguintes modificaes no projeto:
- Utilizar pontes H para acionamento dos motores;
- Utilizar mais sensores, mas que no desliguem o motor, e sim diminuam sua
velocidade.
A primeira modificao foi bem simples, bastou mudar o layout da placa para comportar
um CI 298. J para a segunda modificao, era possvel implement-la analogicamente ou
digitalmente, optou-se por digitalmente, porque o bom senso diz que mais simples e mais
robusto, menos suscetvel a rudo.
Portanto, foram utilizados 6 sensores, 3 para cada motor. A idia bsica continua a
mesma, encontrou-se a linha do lado direito, desligue ou diminua a velocidade do motor do lado
direito e vice-versa.
Projeto Carrinho auto-guiado Pgina 9
Os sensores so espalhados por baixo do carrinho, 3 de um lado e 3 do outro, cada um
mais distante que o outro do centro. O sensor mais prximo do centro diminui um pouco a
velocidade do respectivo motor, o do meio desliga o motor, e o ltimo apenas por segurana
caso o do meio no seja capaz de fazer seu trabalho.
Para que esse controle de velocidade fosse possvel, utilizou-se um contador com um
frequncia fixa, com suas sadas ligadas a entrada seletora de dois muxs, um para cada motor. A
sada de cada um dos muxs ligada ao reset do PMW do respectivo motor. Assim considerando
que a frequncia do contador suficientemente alta, cada um dos muxs ir varrer rapidamente
todas as entradas foi utilizado mux com 8 entradas , e obviamente nessas entradas so ligados
os sensores. Para que cada sensor controle a velocidade de seu respectivo motor, bastou-se que
aquele maior prximo do centro fosse ligado a vrias entradas, o do meio e o ltimo por ser caso
extremo desligassem o enable do mux. Veja Figura 10, nela esto os seis sensores utilizados
que podem ser visto na parte de cima da foto.
Veja o Anexo. Diagrama do projeto final, explicao do circuito: o primeiro 555 IC1 gera o
clock fixo para o contador de 4 bits V1, a sada desse contador ligada s entradas de seleo
dos dois multiplexadores V2 e V3. No diagrama no foram representados os sensores, pois sero
postos em uma placa separada e alimentados separadamente, mas entenda que, o diagrama ser
o mesmo que aquele no Anexo. Diagrama sensor da linha, exceto que neste haver seis
fotodiodos e seis leds infravermelhos. Portanto, como o contador est ligado nas entradas de
seleo do mux, este ir varrer todas as entradas de 0 a 7, numa frequncia alta
aproximadamente 2kHz e como pode ser visto no diagrama, cada sensor tem uma determinada
ligao com o mux, controlando assim o seu peso sobre a velocidade do motor. Os sensores
mais afastados do centro do carrinho e vo ligados no enable do mux, porque se o carrinho estiver
to longe da linha, ele deve rapidamente voltar para a trajetria. Os fotodiodos a meia distncia
esto ligados a trs entradas do mux, assim se estes forem acionados, apenas em 3/8 do tempo,
o motor correspondente ser acionado. J o sensor mais prximo do centro do carrinho deve
apenas corrigir levemente a posio do carrinho, por isso ele ligado a cinco entradas do mux,
assim se estes forem acionados, apenas em 5/8 do tempo o respectivo motor ser acionado.
E como dito anteriormente, os transistores de potncia, foram trocados por pontes-H, logo
a sada do mux ligada ao reset do PWM; um oscilador stavel com 555 e duty-cycle controlado
pelo respectivo potencimetro; do respectivo motor e a sada do PWM ligada ao acionamento da
ponte-H, um CI 298 para motor. importante observar que cada CI desse na verdade possui duas
pontes-H, porm as duas de cada CI esto ligadas em paralelo para melhor suprir a corrente do
motor. Alm disso foram utilizados diodos juntos a ponte-H para melhorar sua resposta ao
chaveamento.
Projeto Carrinho auto-guiado Pgina 10
Diagrama de Blocos
Figura 11. Diagrama de bloco do Projeto Final
Na parte anterior foi discutida a ideia mais geral do projeto, agora sero detalhados todos
os blocos.
Sensores: como pode ser visto na Figura 10, os sensores so no total seis, trs de cada
lado, senso cada lado correspondente ao motor do mesmo lado. O esquema eltrico
exatamente o da Figura 12, porm isso para cada sensor. No foi feito um layout ou diagrama
completo, porque esse bloco foi montado numa placa padro. Portanto na placa padro foram
montados seis verses da figura indicada em paralelo e a sada dessa placa vai para a placa dos
comparadores.
Figura 12. Cada um dos seis pares sensorXLED
Projeto Carrinho auto-guiado Pgina 11
Bloco Comparador: Como pode ser visto pelo Anexo. Circuito e layout de comparadores
dos sensores; foram utilizados seis amp-ops, um para cada um dos sensores, funcionando como
comparadores. Ou seja, a sada dos sensores aplica uma tenso nos terminais inversores dos
amp-ops, e uma referncia ajustada nos terminais no-inversores dos mesmos. Caso no seja
detectada a linha, a sada do sensor estar num nvel acima da tenso de referncia e por isso a
sada do respectivo amp-op ser VCC. Por outro lado, caso seja o sensor esteja sobre a linha, a
corrente pelo foto-sensor diminui e portanto a tenso enviada ao comparador estar acima da
referncia, e como a tenso no pino inversor est acima do no inversor, a sada satura em nvel
0. importante lembrar que, como o amp-op no satura exatamente na tenses de alimentao,
foi utilizada uma nica pilha como uma tenso negativa de -1,5V, para que na saturao em 0 do
amp-op, a sada ficasse em aproximadamente 0V.
Circuito de Controle: como pode ser visto pelo Anexo. Diagrama do projeto final, exceto
sensores vide 42Anexo. Circuito e layout de comparadores dos sensores; as sadas do bloco
comparador so ligadas, de acordo com seu peso, nas entradas dos mux. E um contador numa
freqncia fixa, ligado s entradas de seleo dos dois muxs. Porm foi necessrio utilizar uma
porta NAND para os sensores do meio e o mais afastado, pois o ENABLE do mux acionado em
0; assim qualquer um dos sensores, do meio ou o mais afastado, desliga o motor de seu
respectivo lado. Por outro lado, o sensor mais prximo do centro tem um peso de 50% sobre o
tempo em que o motor fica ligado, pois est ligado em 4 das 8 entradas do mux; assim se ele for
acionado a velocidade do motor cai pra aproximadamente pela metade, pois lembre-se de que
quando a linha encontrada a sada do bloco comparador manda um 0 na respectiva posio do
sensor. Logo, a sada de cada mux vai para o reset do respectivo PWM, ligando ou desligando-o,
ou ento deixando desligado o PWM na metade do tempo.
PWM: tambm faz parte do circuito do Anexo. Diagrama do projeto final, exceto sensores
vide 42Anexo. Circuito e layout de comparadores dos sensores; esse circuito j foi discutido
anteriormente, apenas um 555 como stavel, com uma freqncia de aproximadamente 500Hz,
suficiente para no dar trancos e para no gerar muito rudo no motor. A tenso mdia no motor
pode ser regulada independentemente para cada um dos motores atravs do potencimetro,
desse 0V at a tenso de alimentao dos motores (0 a 100%). A sada do circuito de controle
ligada ao reset do respectivo PWM, para assim ligar, desligar, ou deixar metade do tempo ligado,
cada um dos motores.
Ponte H: foi feita como um bloco separado, porque merece algumas observaes. A ponte
H possui um enable, este acionado pelo PWM. Na verdade a ponte H permite que o motor
troque de sentido de giro, mas o grupo no viu nenhuma vantagem nesse tipo de prtica. Esse CI
foi utilizado apenas porque muito mais simples de utilizar e tem uma robustez muito maior, ou
seja, ele est sendo utilizado apenas para acionamento do motor. Vale lembrar que ele possui
uma queda de tenso, ou seja, se alimentado com uma determinada tenso, no exatamente
entregar toda essa tenso ao motor. Por isso, como cada CI possui duas pontes H, elas foram
ligadas em paralelo, para suportar mais corrente e ter uma queda de tenso menor. Por fim,
importante observar que os dois CIs receberam uma alimentao especial com uma bateria de
9V, pois o motor de 6V, e fosse utilizada a mesma alimentao do resto do circuito, que de
aproximadamente de 6V, o motor no teria torque; portanto por isso existe o bloco Alimentao
especial. Esse bloco nada mais do que uma bateria de 9V que ligada ao pino 4 de cada uma
das duas pontes H. Portanto, desconsidere no anexo correspondente que o pino 4 est ligado
mesma alimentao do resto do circuito. Como esse problema s visto depois, a trilha teve que
ser destruda e soldado um fio por baixo da placa para alimentar as pontes H com a bateria. Logo
o PWM aciona o enable da ponte H correspondente, ligando ou desligando o motor.
Montagem do carrinho
J foi mostrado na Figura 10 o modo como os motores foram posicionados, ou seja, de
modo oposto um ao outro. Estes foram presos com uma presilha ao chassi fornecido. Alm disso,
foi utilizada a roda-boba na frente do carrinho para permitir que este vire livremente. Essa roda-
boba foi presa com cola-quente ao mesmo chassi.
A seguir mais algumas fotos:
Projeto Carrinho auto-guiado Pgina 12
Figura 13. Carrinho, com posio das placas detalhadas
Figura 14. Vista lateral do carrinho, mostrando alimentaes
Projeto Carrinho auto-guiado Pgina 13
Figura 15. Viso frontal do carrinho, mostrando suportes de papelo
Como pode ser visto pelas figuras acima, foram utilizados suportes de papelo junto com
parafusos e porcas para posicionar as placas. A placa de sensores posiciona frente do
carrinho obviamente. O resto no precisa ser explicado, as figuras so auto-explicativas. Apenas
note os potencimetros, peas azuis. Na placa principal, h dois potencimetros, que regulam
independentemente cada um dos PWMs. Na placa dos comparadores, h seis potencimetros,
um para cada sensor, para regular a tenso de referncia, para que assim seja possvel que o
carrinho funcione em vrias superfcies diferentes.
III. Clculos
Basta lembrar que VCC = 5V
Reconhecimento de linha
Basta dimensionar o circuito de polarizao dos LEDs infravermelhos e do fotodiodo:
LEDs:
Para uma corrente de aproximadamente 20mA, vide datasheet, tem-se uma queda de
aproximadamente 1V, portanto o resistor deve ser aproximadamente 250 ohms, portanto valor
escolhido comercialmente foi por segurana um pouco mais alta: 330 ohms.
330 R = O para LED
Fotodiodos:
Pelo datasheet v-se que a corrente reversa para um luminncia tpica aproximadamente
25 A u , portanto um resistor de 100kO, suficiente para quando iluminado a tenso no terminal
no-inversor seja 2, 5V , por isso o valor comercial de 100kO foi o escolhido. Na ausncia de
iluminao a corrente tpica de 1nA, fazendo com que a tenso no terminal no inversor do
amp-op seja praticamente 5V .
Projeto Carrinho auto-guiado Pgina 14
O potencimetro escolhido foi o de 10kO, mas apenas por ser um valor tpico, porm seu
ajuste ser completamente experimental, pois na verdade a tenso de sada do fotodiodo vai
variar conforme o componente, alm das condies externas e tipo de superfcie.
10 P k = O e 100 R k = O
Pre-projeto
Os clculos para polarizao dos LEDs e fotodiodos continuam valendo.
Nesta parte devem ser dimensionados os componentes para o PWM, a polarizao do
drive e do transistor de potncia:
PWM:
Devido aos diodos, sendo o a posio do potencimetro, o capacitor se carrega por P o e
se descarrega por (1 )P o : assim sendo o clculo da frequncia dado por, desprezando a
queda de tenso nos diodos apenas como uma aproximao:
1
0, 7 P C
Portanto para um potencimetro comum de 100kO, e objetivando-se uma frequncia de
aproximadamente 150Hz, o capacitor deveria ser de aproximadamente 100nF. Porm na parte de
testes, verificar-se- que est frequncia muito baixa, e para aumento de 10 vezes a frequncia,
basta diminuir 10 vezes o valor do capacitor.
100 P k = O e 100 C nF =
Alm disso foram colocados capacitores nos pinos 5 e entre o VCC e terra, apenas para
evitar spikes de tenso, e foi posto um valor tpico de 100nF
Os diodos devem ser fast-swithc, portanto 1N4148 satisfaz todas as necessidades.
Drive:
Pelo datasheet do 555, a corrente tpica de acionamento do reset de 1mA, e portanto o
transistor deve saturar. O transistor utilizado bem comum, e, portanto apenas como
aproximao, considerar-se- que ele trabalha no limiar da saturaoXregio-linear e que
100 | ~ . Considerando o limiar da saturao, ainda pode-se aplicar as equaes de ganho de
corrente. Portanto, escolhendo um resistor de coletor de 1kO, que caem sobre ele
aproximadamente 5V , tem-se uma corrente total de coletor de 6mA, com ganho de 100, implica
que a corrente de base deve ser aproximadamente 60mA, considerando 0, 7
be
v V , tem-se que
o resistor de base deve-ser aproximadamente 100kO.
100
b
R k = O e 1
c
R k = O
Transistor de Potncia
Na verdade, no necessrio um dimensionamento neste caso, pois a sada do 555 j
estar abaixo ou acima do limiar do transistor MOS, este que praticamente no tem corrente de
porta. Portanto foram apenas colocados alguns resistores entre o 555 e o transistor para no se
ter um acoplamento capacitivo direto entre ambos, foi escolhido muito maior que para que a
tenso na porta do transistor seja praticamente VCC quando a sada do 555 estiver acionada:
1
p
R k = O e 10
b
R = O
O diodo colocado em paralelo ao motor um diodo tambm tpico, o 1N4004, que suporta
uma corrente maior que o mximo obtido experimentalmente com o motor.
Projeto final
O dimensionamento para a polarizao dos LEDs e dos fotodiodos continua sendo o
mesmo, tambm o PWM dos motores continua sendo o mesmo. Porm agora no ser utilizado o
drive, pois no circuito dos sensores foi adicionada uma pilha para gerar 1, 5V . Tambm no
ser utilizado mais o circuito com transistor de potncia, mas quatro pontes-H, duas em paralelo
para cada motor.
Projeto Carrinho auto-guiado Pgina 15
Alm disso a ponte-H no necessita de dimensionamento, pois trabalha com nveis de
tenso TTL. importante notar apenas que para melhorar a resposta da ponte, foram colocados
diodos em paralelo a cada sada, tpicos 1N4004.
Clock do contador
Para gerao do clock do contador foi utilizado um 555 independente, como oscilador
astvel, sem potencimetros ou diodos. Foi desejado obter uma onda quadrada, por isso
1 2 t t
R R , e portanto a frequncia dado aproximadamente por:
2
0, 73
t
f
R C
Utilizando o valor disponvel de 47 C nF = , e desejando-se obter um clock de
aproximadamente 3 f kHz , implica que
2
4, 7
t
R kO. Alm disso, do mesmo modo que
anteriormente, colocou-se capacitores de 100 C nF = nos pinos 5 e entre o VCC e terra para
evitar spikes de tenso. Tambm para que a hiptese inicial seja satisfeita, foi escolhido um
valor baixo para o outro resistor:
1
1
t
R k = O, assim a onda ser aproximadamente quadrada.
1
1
t
R k = O e
2
4, 7
t
R k = O
e 47 C nF =
IV. Testes
Circuito dos sensores
Foi verificado se era possvel detectar a linha com o primeiro circuito gerado pelo grupo.
Constatou-se que sim, porm o funcionamento do circuito fugiu um pouco do esperado. A tenso
de sada da polarizao do fotodiodo variou entre 4, 3V e 4, 7V .
Porm ainda sim, foi possvel manualmente encontrar um ponto no potencimetro no qual
fosse possvel fazer uma diferenciao entre a pista branca e a linha preta. O grupo atribui esse
fato ao sensor no corresponder exatamente s caractersticas especificadas, e tambm ao
espectro da luz do sol, j que a radiao solar tambm possui componentes espectrais na regio
do infravermelho. Para diminuir seus efeitos, portanto, o grupo diminuiu a distncia entre os
sensores e a superfcie refletora, obtendo melhores resultados.
Pre-Projeto
O circuito do PWM funcionou corretamente, conseguindo controlar razoavelmente a
velocidade do motor. Foi necessrio aumentar a frequncia do PWM, para aproximadamente
500Hz, para que no fossem perceptveis os trancos no carrinho .Alm disso como
inconveniente foi constatado pelo grupo foi que o transistor de potncia no estava fornecendo
uma boa corrente ao motor, provavelmente porque a sada do 555 era de pouco mais de 3V , e o
limiar do transistor MOS utilizado era aproximadamente isso. Esse problema foi corrigido
utilizando uma ponte-H para acionar os motores no projeto final.
No teste do carrinho utilizando apenas um sensor para cada motor (on off apenas), ele
conseguiu at seguir um curva, mas lentamente, e as vezes com problema de torque. Por isso,
essa idia foi abandonada, e no projeto final foram utilizados mais de um sensor com pesos
diferentes.
Projeto final
Aplicando a idia dos trs sensores para cada motor e usando a ponte-H para acionar o
motor, o desempenho do carrinho foi perceptivelmente muito superior ao anterior. A frequncia de
aproximadamente 3kHz para o contador se mostrou eficiente, no prejudicando a resposta do 555
e no gerando trancos no carrinho. Ele conseguia andar muito mais rpido e fazer curvas mais
fechadas. Um dos problemas que o grupo encontrou foi que utilizando a tenso comum para
alimentar tambm a ponte H, resultou num motor sem torque, por isso foi feita uma alimentao
especial para os CI 298. Isso resultou num grande melhora de desempenho, alm de
salvaguardar as pilhas, consumindo praticamente apenas a bateria para alimentao da ponte H.
Tambm importante observar que, s vezes, pequenas sujeiras na pista eram interpretadas
como a linha, isso foi possvel resolver ajustando o potencimetro dos sensores.
Projeto Carrinho auto-guiado Pgina 16
V. Oramento
Foram comprados todos os itens abaixo, infelizmente no foi possvel fazer um inventrio
para saber a quantidade, nem o preo unitrio, mas pode-se dizer que o custo total aproximado foi
de R$ 300,00.
Mux 74151
Contador 74161
Porta NAND 7400
Dual Ponte H L298 (na verdade foi doada, agradecimentos ao Halph)
Par Foto Sensor e LED infra TCRT 5000
Dual Amp-op LF353
CI NE555
Regulador de tenso KA7805
Potencimetros de 100k e 10k
Resistores de vrios valores
Capacitores de cermica e eletroltico de vrios valores
Diodos 1N4004
Diodos 1N4148
Fios e cabos
Motores 6V 248 RPM com reduo
Roda-boba
Rodas de Espuma
Pin-heads e conectores
Pilhas e Baterias
LEDs de vrios tamanhos
Placa padro para montagem
Placa de cobre tamanho padro
Liga de estanho e chumbo para soldagem
VI. Concluso
Como concluses, o grupo percebeu que CIs so quase sempre muito melhores que
componentes discretos, por causa dos transistores de potncia que no conseguiam fornecer o
torque ao motor, enquanto que as pontes-H facilmente permitiam que o motor andasse a plena
potncia.
Alm disso, a aplicao do PWM completamente indispensvel, pois permite, sem
grande perda de torque, controlar a velocidade de um motor DC. preciso tomar cuidado apenas
com o rudo gerado em altas freqncias, e ao fato do motor ter uma resposta em frequncia que
pode prejudicar seu desempenho em freqncias altas.
Tambm, foi interessante notar que a utilizao de emissores na faixa de frequncia
infravermelha permitiu uma maior sensibilidade dos sensores (veja curva da Figura 4 e Anexo.
Datasheet fotodiodo) , tomando cuidado sempre com a luz ambiente que pode interferir
provocando mau funcionamento.
Referncias Bibliogrficas
Politcnica, E. (Fevereiro 2012). Apostila de Eletrnica Experiemental I. So Paulo.
Politcnica, E. (Agosto 2012). Apostila de Eletrnica Experiemental II. So Paulo.
Sedra, A. S., & Smith, K. C. (2007). Microeletrnica. So Paulo: Pearson Prentice Hall.
Projeto Carrinho auto-guiado Pgina 17
Anexos
1 Anexo. Datasheet fotodiodo
Projeto Carrinho auto-guiado Pgina 18
Projeto Carrinho auto-guiado Pgina 19
Projeto Carrinho auto-guiado Pgina 20
Projeto Carrinho auto-guiado Pgina 21
Projeto Carrinho auto-guiado Pgina 22
2 Anexo. Diagrama sensor da linha
3 Anexo. Layout sensor da linha
Projeto Carrinho auto-guiado Pgina 23
4 Anexo. Datasheet transistor de potncia
aaaaaa
Projeto Carrinho auto-guiado Pgina 24
Projeto Carrinho auto-guiado Pgina 25
Projeto Carrinho auto-guiado Pgina 26
5 Anexo. Datasheet 555
a
Projeto Carrinho auto-guiado Pgina 27
Projeto Carrinho auto-guiado Pgina 28
Projeto Carrinho auto-guiado Pgina 29
Projeto Carrinho auto-guiado Pgina 30
6 Anexo. Diagrama circuito conjunto sensor + PWM
7 Anexo. Layout circuito conjunto sensor + PWM
Projeto Carrinho auto-guiado Pgina 31
8 Anexo. Diagrama do projeto final, exceto sensores vide
42Anexo. Circuito e layout de comparadores dos sensores
Projeto Carrinho auto-guiado Pgina 32
9 Anexo. Layout projeto final
Parte superior do Layout
Parte inferior do Layout
Projeto Carrinho auto-guiado Pgina 33
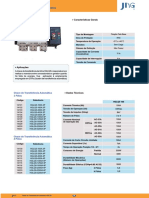
10 Anexo. Datasheet L298, ponte-H dupla
Projeto Carrinho auto-guiado Pgina 34
Projeto Carrinho auto-guiado Pgina 35
Projeto Carrinho auto-guiado Pgina 36
Projeto Carrinho auto-guiado Pgina 37
11 Anexo.LF353, amp-op duplo
as
Projeto Carrinho auto-guiado Pgina 38
Projeto Carrinho auto-guiado Pgina 39
Projeto Carrinho auto-guiado Pgina 40
12 Anexo. Datasheet 7805, regulador de tenso
aaaa
Projeto Carrinho auto-guiado Pgina 41
Projeto Carrinho auto-guiado Pgina 42
13. Anexo. Circuito e layout de comparadores dos sensores
Diagrama do Circuito
Layout do Circuito. Obs: as trilhas no roteadas em amareleo foram feitas na parte superior com
fios
You might also like
- Introdução A Estrutura de Dados - Aula 1Document12 pagesIntrodução A Estrutura de Dados - Aula 1jonataspulzNo ratings yet
- Gps LogDocument5 pagesGps LogjonataspulzNo ratings yet
- Experiência Sistemas IntegradosDocument4 pagesExperiência Sistemas IntegradosjonataspulzNo ratings yet
- Tubo de PitotDocument11 pagesTubo de PitotjonataspulzNo ratings yet
- Projeto de Fontes Chaveadas - Caps.2-5Document50 pagesProjeto de Fontes Chaveadas - Caps.2-5jonataspulzNo ratings yet
- Series FourierDocument6 pagesSeries FourierAndréia LimaNo ratings yet
- Mid 171 B12RDocument120 pagesMid 171 B12RKadoche Santo100% (1)
- WinPower Quick Installation and SetupDocument818 pagesWinPower Quick Installation and Setupmcfaria20009603100% (3)
- Vários CircuitosDocument25 pagesVários CircuitosRonan NolascoNo ratings yet
- Lista de Exercícios de EletrostáticaDocument2 pagesLista de Exercícios de EletrostáticaFernando GaiottoNo ratings yet
- Noções de Robótica para Ensino Médio Integrado à Educação ProfissionalDocument125 pagesNoções de Robótica para Ensino Médio Integrado à Educação ProfissionalherberttechNo ratings yet
- UntitledDocument100 pagesUntitledFAUSTO100% (2)
- Curso Manutenção de Notebooks + Placa-Mãe + Solda BGA em São Paulo - Capital (Maio/2013)Document7 pagesCurso Manutenção de Notebooks + Placa-Mãe + Solda BGA em São Paulo - Capital (Maio/2013)Millennium TecnologiaNo ratings yet
- EVOTECH: confiabilidade e continuidade de serviçoDocument26 pagesEVOTECH: confiabilidade e continuidade de serviçoHARLEY SANDERSNo ratings yet
- Circuitos com DiodoDocument20 pagesCircuitos com DiodoThiago de Santana SouzaNo ratings yet
- Ebook Guia Fácil Do FlashDocument19 pagesEbook Guia Fácil Do FlashAlexandro PereiraNo ratings yet
- Lote 32 Anexo Tecnico Especifico Leilao 05 2016 PDFDocument17 pagesLote 32 Anexo Tecnico Especifico Leilao 05 2016 PDFcaioNo ratings yet
- Manual de Operação - TRAFO 3 WEG 69-34,5 KVDocument14 pagesManual de Operação - TRAFO 3 WEG 69-34,5 KVLucas Gabriel CunhaNo ratings yet
- Datasheet XP-590W-78MET BifacialDocument2 pagesDatasheet XP-590W-78MET BifacialjulianoNo ratings yet
- Cap 02 - Aula 01 - Transformadores 1Document44 pagesCap 02 - Aula 01 - Transformadores 1Fagner SantanaNo ratings yet
- Monitor de Temperatura para Transformador SecoDocument67 pagesMonitor de Temperatura para Transformador SecormosmannNo ratings yet
- Introdução aos Sistemas EletropneumáticosDocument5 pagesIntrodução aos Sistemas EletropneumáticosAlfredo Mavungo100% (1)
- Trabalho 1 - Eletrônica de PotênciaDocument3 pagesTrabalho 1 - Eletrônica de Potênciajardel.seibelNo ratings yet
- CondutimetriaDocument78 pagesCondutimetriaRenato ZanNo ratings yet
- MRTV 365 - Setembro 1978Document104 pagesMRTV 365 - Setembro 1978asccorreaNo ratings yet
- Motor EletricoDocument9 pagesMotor EletricoRobson Tenorio CavalcanteNo ratings yet
- CumminsDocument150 pagesCumminsWallace Ferreira100% (9)
- Eletrostatica 1Document1 pageEletrostatica 1Josivan SantosNo ratings yet
- Força eletrostática entre cargas pontuaisDocument7 pagesForça eletrostática entre cargas pontuaisLorena SouzaNo ratings yet
- JNG - Catálogo AutomaçãoElétrica 2021-104-109Document6 pagesJNG - Catálogo AutomaçãoElétrica 2021-104-109Mariane CamargoNo ratings yet
- Atividade de Associacao de Resistores Serie e Paralelo e Potencia DissipadaDocument3 pagesAtividade de Associacao de Resistores Serie e Paralelo e Potencia DissipadaVictória SallesNo ratings yet
- Aula prática sobre propagação de ondas e sistemas de comunicação sem fioDocument3 pagesAula prática sobre propagação de ondas e sistemas de comunicação sem fioLanguane100% (1)
- Modelagem BLDC Barco SolarDocument81 pagesModelagem BLDC Barco SolarBárbara PeixotoNo ratings yet
- Apostila de Eletronica Multimetro v2Document13 pagesApostila de Eletronica Multimetro v2CesarCamposNo ratings yet
- Transmissão em Corrente AlternadaDocument33 pagesTransmissão em Corrente AlternadaRafael CordeiroNo ratings yet
- Blazer Multec EMS EFIDocument29 pagesBlazer Multec EMS EFIDora Ceschin73% (15)