You might also like
- IRB 140 DatasheetDocument2 pagesIRB 140 Datasheetcontrol555No ratings yet
- Robot ABB IRB 6660, PremecanizadosDocument2 pagesRobot ABB IRB 6660, PremecanizadosWalter HerreraNo ratings yet
- Industrial Robot: Main Applications Machine Tending Material Handling Press Tending Spot WeldingDocument2 pagesIndustrial Robot: Main Applications Machine Tending Material Handling Press Tending Spot WeldingCristian JiménezNo ratings yet
- Datos Técnicos Robot Industrial IRB 6600 03Document2 pagesDatos Técnicos Robot Industrial IRB 6600 03gussyNo ratings yet
- Pr10031en R14 LRDocument2 pagesPr10031en R14 LRIstvan VeghNo ratings yet
- Industrial RobotDocument2 pagesIndustrial RobotMurat SertNo ratings yet
- ABB IRB 2400 SpecificatiiDocument2 pagesABB IRB 2400 Specificatiialin.butunoi865No ratings yet
- Irb 1410 Pr10325en - R3Document2 pagesIrb 1410 Pr10325en - R3Salih Murat SezgiNo ratings yet
- ABB-IRB 140 - enDocument2 pagesABB-IRB 140 - enIgnacioMoya MorenoNo ratings yet
- Irb 2600Document2 pagesIrb 2600Dragos-Ionut NechitaNo ratings yet
- Robo142en B LRDocument2 pagesRobo142en B LRStroie MihaiNo ratings yet
- Irb 260Document2 pagesIrb 260ANDRENo ratings yet
- Irb 6620lxDocument2 pagesIrb 6620lxAlexandru RaduNo ratings yet
- IRB 5400 Process DatasheetDocument2 pagesIRB 5400 Process DatasheetYady SuárezNo ratings yet
- Manual ShortDocument2 pagesManual ShortViktor SokolovNo ratings yet
- Potenciometro Peso Base - Wab - 971Document2 pagesPotenciometro Peso Base - Wab - 971alicardozoNo ratings yet
- Datasheet - Abb Irb6620Document2 pagesDatasheet - Abb Irb6620Iulia CostacheNo ratings yet
- CAT - VSB-Vibrant Compact Dynamic AC DrivesDocument4 pagesCAT - VSB-Vibrant Compact Dynamic AC DrivessrshahNo ratings yet
- Robotics IRB140Document2 pagesRobotics IRB140craigNo ratings yet
- Industrial Robot: Small, Powerful and FastDocument2 pagesIndustrial Robot: Small, Powerful and FastPriyansh LaddhaNo ratings yet
- Irb 660Document2 pagesIrb 660mustafa bodurNo ratings yet
- Adept Cobra S 6 0 0: Robot SpecificationsDocument2 pagesAdept Cobra S 6 0 0: Robot SpecificationsalikaastridNo ratings yet
- IRB 5400 Process DatasheetDocument2 pagesIRB 5400 Process Datasheetmlucian73No ratings yet
- Kawasaki FS03N Compact High Speed Industrial Robot: Key FeaturesDocument2 pagesKawasaki FS03N Compact High Speed Industrial Robot: Key FeaturesMarkus ManoNo ratings yet
- Industrial Robot ABB's Smallest Robot - For Flexible and Compact ProductionDocument2 pagesIndustrial Robot ABB's Smallest Robot - For Flexible and Compact ProductionCristiano CardosoNo ratings yet
- TowFLEXX® 600 RCDocument12 pagesTowFLEXX® 600 RCAREZZO AVIANo ratings yet
- System 2450 ESUDocument4 pagesSystem 2450 ESUFrancisco GarciaNo ratings yet
- ROB0206EN - A - IRB 460 Data SheetDocument2 pagesROB0206EN - A - IRB 460 Data SheetDraghescu DanielNo ratings yet
- IRB 140 Datasheet PDFDocument2 pagesIRB 140 Datasheet PDFTulioPenaNo ratings yet
- Opening A New World of Possibilities: Leanid Dress PackDocument4 pagesOpening A New World of Possibilities: Leanid Dress PacknavnathNo ratings yet
- IRB 6700 - Robô IndustrialDocument4 pagesIRB 6700 - Robô IndustrialMaurício SousaNo ratings yet
- # 6 - 1 Attachment ABB DCSDocument4 pages# 6 - 1 Attachment ABB DCSKevin NgoNo ratings yet
- Laser Control System For Land LevelerDocument10 pagesLaser Control System For Land LevelerSuny KhanNo ratings yet
- R-2000iB (E) v08Document8 pagesR-2000iB (E) v08Bromax DandanNo ratings yet
- IRB1520ID ROB0214EN Rev.IDocument2 pagesIRB1520ID ROB0214EN Rev.IAndrzej WojciechowskiNo ratings yet
- Parason Molded Fiber ProductsDocument26 pagesParason Molded Fiber ProductsGabriel T. BastosNo ratings yet
- SSF2000Document2 pagesSSF2000sujinssridaNo ratings yet
- Industrial Robot: Main Applications Material Handling PalletizingDocument2 pagesIndustrial Robot: Main Applications Material Handling PalletizingStoian ValentinNo ratings yet
- FB WeighingDocument8 pagesFB Weighingdeden rahardyansyahNo ratings yet
- Fanuc AC Servo Spindle Motor Ai PDFDocument12 pagesFanuc AC Servo Spindle Motor Ai PDFmetalservis2009No ratings yet
- ARI Armaturen ARI SteviDocument12 pagesARI Armaturen ARI SteviCaptain98No ratings yet
- 9 PRO Alpha550 ENDocument12 pages9 PRO Alpha550 ENZayene KhmaisNo ratings yet
- Buyer General Catalogue 1109Document18 pagesBuyer General Catalogue 1109김성종No ratings yet
- en-IDDocument23 pagesen-IDEsa MuliaNo ratings yet
- ABB RobotDocument2 pagesABB RobotchoongzjNo ratings yet
- FME AquaA GB RGBDocument4 pagesFME AquaA GB RGBAlejandra M Jiménez JuárezNo ratings yet
- IRB-1410-PR10325EN - Rev.CDocument2 pagesIRB-1410-PR10325EN - Rev.CJehan AICNo ratings yet
- Specification Data: Self Aligning RotatorsDocument4 pagesSpecification Data: Self Aligning RotatorsOdprirodeNo ratings yet
- Mini BCH Make Limit SwitchesDocument6 pagesMini BCH Make Limit SwitchesAbhinay SuratkarNo ratings yet
- Transferencias Automaticas ABBDocument24 pagesTransferencias Automaticas ABBCesar BorregoNo ratings yet
- Actuators Cat Andco f10 08Document52 pagesActuators Cat Andco f10 08Thalavai Balamurugan100% (1)
- Industrial Robot: Main Application Arc WeldingDocument2 pagesIndustrial Robot: Main Application Arc WeldingANDRENo ratings yet
- Id 14 Content Product Type PDFDocument36 pagesId 14 Content Product Type PDFdesrytandiNo ratings yet
- Sprint Single Phase DC DrivesDocument16 pagesSprint Single Phase DC DrivesNelson P. ColoNo ratings yet
- UtesDocument4 pagesUtesPaviter SinghNo ratings yet
- 6HI Reversible Cold Rolling 1350 MM, 550 MPM: Client: PLASTOCHEM India Pvt. LTDDocument58 pages6HI Reversible Cold Rolling 1350 MM, 550 MPM: Client: PLASTOCHEM India Pvt. LTDSANTOSH TIWARINo ratings yet
- Solid State Transformer: Revolutionizing the power grid for power quality and energy efficiencyFrom EverandSolid State Transformer: Revolutionizing the power grid for power quality and energy efficiencyNo ratings yet
- Fiat Doblo Timing Belt Fitting Instructions 16d Multijet PDFDocument8 pagesFiat Doblo Timing Belt Fitting Instructions 16d Multijet PDFNenad MarticNo ratings yet
- Flowserve 520siDocument20 pagesFlowserve 520siNenad MarticNo ratings yet
- Senzori Motora PDFDocument370 pagesSenzori Motora PDFNenad MarticNo ratings yet
- Workshop Repair Manual: Engine Fitted On The: - Megane: DA03 F5R 740 EA03Document106 pagesWorkshop Repair Manual: Engine Fitted On The: - Megane: DA03 F5R 740 EA03Neacsu BogdanNo ratings yet
- ABB ACS880 - FW - Man - CDocument304 pagesABB ACS880 - FW - Man - CNenad MarticNo ratings yet
- ABB Firmware ManualDocument408 pagesABB Firmware ManualNenad MarticNo ratings yet
- Lenze ESMD 230VDocument23 pagesLenze ESMD 230VNenad MarticNo ratings yet
- 4g13 MitsubisiDocument230 pages4g13 MitsubisiNenad Martic88% (17)
- AISIN Japan Clutch Catalog 2006-2007Document244 pagesAISIN Japan Clutch Catalog 2006-2007Nenad Martic100% (1)
- PCL-839 & PCL-839+Document2 pagesPCL-839 & PCL-839+Nenad MarticNo ratings yet
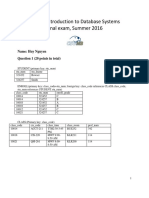
- CST363 Final Exam HuyNguyenDocument9 pagesCST363 Final Exam HuyNguyenHuy NguyenNo ratings yet
- Maipu MannualDocument12 pagesMaipu MannualKazi BarakatNo ratings yet
- Nguyen Pham Hai An's ResumeDocument2 pagesNguyen Pham Hai An's ResumeSea Hai AnNo ratings yet
- Unit 2 NotesDocument75 pagesUnit 2 NotesrajeeevaNo ratings yet
- Data Privacy and Online LearningDocument23 pagesData Privacy and Online LearningReymart de VeraNo ratings yet
- Worksheet 1Document2 pagesWorksheet 1Victor FamilienaamNo ratings yet
- A Study of Consumer Behavior Patterns in On-Line Shopping: Thesis Submitted byDocument36 pagesA Study of Consumer Behavior Patterns in On-Line Shopping: Thesis Submitted bysinha2512No ratings yet
- Internship PPT On SAP-ABAPDocument22 pagesInternship PPT On SAP-ABAPAnushka Choudhary0% (1)
- Coa Module 1Document79 pagesCoa Module 1B G JEEVANNo ratings yet
- DP-A120 User GuideDocument92 pagesDP-A120 User GuideCarlos Raga100% (5)
- DesignPad Text Editor User Manual Release v2.72 © 2000-2018 Mentor Graphics CorporationDocument122 pagesDesignPad Text Editor User Manual Release v2.72 © 2000-2018 Mentor Graphics CorporationdupipiNo ratings yet
- HEC-ResSim 30 UsersManual PDFDocument512 pagesHEC-ResSim 30 UsersManual PDFvitensaNo ratings yet
- AS400 Questions SDocument21 pagesAS400 Questions SNaveen SaharanNo ratings yet
- BAS1303 White Paper Interface Comparsion eDocument5 pagesBAS1303 White Paper Interface Comparsion eIndraNo ratings yet
- Murata MA40 SERIESDocument2 pagesMurata MA40 SERIESMiltonAlvaradoPonceNo ratings yet
- Tic Tac ToeDocument17 pagesTic Tac ToeAlvin Wilfred OgotNo ratings yet
- Rebecca WilsonDocument1 pageRebecca WilsonrebeccarwilsonNo ratings yet
- PSQ Notes. Chapter 3Document46 pagesPSQ Notes. Chapter 3Getahun shankoNo ratings yet
- MB Gusset DesignDocument172 pagesMB Gusset DesignRamakrishnan Sakthivel100% (1)
- DBM CSC FormDocument4 pagesDBM CSC FormJing Goal Merit0% (1)
- Product Brochure HP X58045Document17 pagesProduct Brochure HP X58045terNo ratings yet
- Communications201101 DLDocument132 pagesCommunications201101 DLAle SandovalNo ratings yet
- Adempiere Next Generation Point of SalesDocument6 pagesAdempiere Next Generation Point of Salesiamsudiro7674No ratings yet
- Unit 41 Electrical Installation Design in Building Services EngineeringDocument15 pagesUnit 41 Electrical Installation Design in Building Services EngineeringSoch SochNo ratings yet
- Chap07y atDocument192 pagesChap07y atAulia Luqman LionarNo ratings yet
- HTML Question PaperDocument14 pagesHTML Question PaperNarendran88% (41)
- Patch NotesDocument8 pagesPatch Notesradijet07No ratings yet
- Manual de La MotherboardDocument18 pagesManual de La MotherboardelkinpearandaNo ratings yet
- OptimizationDocument96 pagesOptimizationGuruKPO67% (3)
- Bicotest Model T272 US A4v2Document2 pagesBicotest Model T272 US A4v2Jusril A HidayatNo ratings yet