You might also like
- Digital Benchtop Power Supply Part 1Document4 pagesDigital Benchtop Power Supply Part 1vacsaaNo ratings yet
- Use A Transistor As A Heater PDFDocument5 pagesUse A Transistor As A Heater PDFFlorin Marica100% (1)
- AN1303 A Simple 4-20 Ma Pressure Transducer Evaluation BoardDocument8 pagesAN1303 A Simple 4-20 Ma Pressure Transducer Evaluation BoardFadilla El HuSnaNo ratings yet
- L200 Design GuideDocument21 pagesL200 Design Guidetxe_scientistNo ratings yet
- Schematic Diagram and OperationDocument5 pagesSchematic Diagram and OperationHarishNo ratings yet
- Using Digital Potentiometers in Adjustable Step-Down DC-DC Converter DesignsDocument9 pagesUsing Digital Potentiometers in Adjustable Step-Down DC-DC Converter Designsmelwyn_thomasNo ratings yet
- x060309 PDFDocument5 pagesx060309 PDFlu1agpNo ratings yet
- Data SheetDocument8 pagesData SheetRucelle Chiong GarcianoNo ratings yet
- 25638-Acquire Images With A Sensor and A Micro Controller PDFDocument5 pages25638-Acquire Images With A Sensor and A Micro Controller PDFSzilagyi SebaNo ratings yet
- Unit-3 - Function Generator Using IC 8038Document10 pagesUnit-3 - Function Generator Using IC 8038yp2401553No ratings yet
- CN0350Document7 pagesCN0350Narayan ApteNo ratings yet
- Simple automatic-shutoff circuit uses few componentsDocument5 pagesSimple automatic-shutoff circuit uses few componentsJuan Manuel Han MacNo ratings yet
- HCNR200 Application NoteDocument10 pagesHCNR200 Application NoteLogan JohnsonNo ratings yet
- LM331 VFCDocument15 pagesLM331 VFCfmsanturioNo ratings yet
- 15 To 60 Watt Audio Amplifiers Using Complementary Darlington Output Transistors - An-483BDocument8 pages15 To 60 Watt Audio Amplifiers Using Complementary Darlington Output Transistors - An-483BAnonymous kdqf49qb100% (1)
- High Bandwidth Low Noise Amplifier with improved stabilityDocument11 pagesHigh Bandwidth Low Noise Amplifier with improved stabilitysushil4056No ratings yet
- IADC DesignDocument10 pagesIADC Designchintu333No ratings yet
- VumetroDocument28 pagesVumetroJavier Gallegos IbarraNo ratings yet
- DiDocument5 pagesDiTao Quang BinhNo ratings yet
- Sames: Three Phase Power / Energy IC With SPI InterfaceDocument12 pagesSames: Three Phase Power / Energy IC With SPI InterfaceArjun NivassNo ratings yet
- I CL 8013 Data SheetDocument9 pagesI CL 8013 Data SheetSebastian FossNo ratings yet
- UC3842 current mode controller application noteDocument7 pagesUC3842 current mode controller application noteCui BapNo ratings yet
- Am 422Document10 pagesAm 422Nicola CardinNo ratings yet
- Data Sheet TC 14433Document20 pagesData Sheet TC 14433Heriberto Flores AmpieNo ratings yet
- Electronic Circuits - II Lab ManualDocument26 pagesElectronic Circuits - II Lab Manualbalabasker100% (1)
- 1.5v Battery ChargerDocument25 pages1.5v Battery ChargerJOHN BRICCO A. MATACSILNo ratings yet
- LM3914 Dot Bar Display Driver GuideDocument16 pagesLM3914 Dot Bar Display Driver GuideHelton AmorimNo ratings yet
- 0-30V Stabilized Variable Power Supply With Current ControlDocument3 pages0-30V Stabilized Variable Power Supply With Current ControlWaskita IITNo ratings yet
- Lab 1 Power SupplyDocument7 pagesLab 1 Power SupplyKatherine YenNo ratings yet
- Circuit Design of Feedback Based On TL431 in Fly-Back ConverterDocument4 pagesCircuit Design of Feedback Based On TL431 in Fly-Back Converterjay lowkeyNo ratings yet
- LM392Document6 pagesLM392Brzata PticaNo ratings yet
- Electronics Hobby CircuitsDocument183 pagesElectronics Hobby Circuitsbeckam88100% (3)
- Smart Voltage Stabilizer Using PIC16F877ADocument8 pagesSmart Voltage Stabilizer Using PIC16F877AAswathy CjNo ratings yet
- BI Technologies R2R Resistor Ladder NetworksDocument6 pagesBI Technologies R2R Resistor Ladder NetworksChethan JayasimhaNo ratings yet
- M62301SP, FP: Description Pin Configuration (Top View)Document9 pagesM62301SP, FP: Description Pin Configuration (Top View)roozbehxoxNo ratings yet
- Applications of Balanced ModulatorDocument5 pagesApplications of Balanced ModulatorSomeshwar GaddalaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Converter 12 VDC To 230 Vac or Inverter - Power Supply CircuitsDocument2 pagesConverter 12 VDC To 230 Vac or Inverter - Power Supply CircuitsIkkasama NaguenneNo ratings yet
- Accurate 1 Second Time Base From Crystal OscillatorDocument4 pagesAccurate 1 Second Time Base From Crystal OscillatorOliverQueen773sNo ratings yet
- Analogue 1 ProjectDocument9 pagesAnalogue 1 ProjectCJ CHNo ratings yet
- LM3914 Dot/Bar Display Driver: Literature Number: SNVS761ADocument24 pagesLM3914 Dot/Bar Display Driver: Literature Number: SNVS761AJhonny RodriguezNo ratings yet
- FM Modulators: Experiment 7Document17 pagesFM Modulators: Experiment 7banduat83No ratings yet
- Analog Sensor InterfacingDocument5 pagesAnalog Sensor Interfacingkokolanski100% (1)
- Design Note: Optimizing Performance in Uc3854 Power Factor Correction ApplicationsDocument42 pagesDesign Note: Optimizing Performance in Uc3854 Power Factor Correction ApplicationsidsufixNo ratings yet
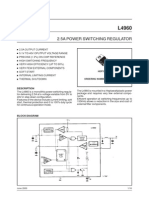
- 2.5A Power Switching Regulator: DescriptionDocument16 pages2.5A Power Switching Regulator: Descriptionbikram9830No ratings yet
- Lm331 AppnoteDocument8 pagesLm331 AppnoteEward KenNo ratings yet
- Analog To Digital Converter and Vise VersDocument7 pagesAnalog To Digital Converter and Vise VersSpyx MeniNo ratings yet
- About TL494 Smps Control ICDocument9 pagesAbout TL494 Smps Control ICTerlumun JosephNo ratings yet
- FSK Modulator Lab ReportDocument10 pagesFSK Modulator Lab ReportJyotirmoy DekaNo ratings yet
- Frequency To Voltage Converter Circuit DiagramDocument8 pagesFrequency To Voltage Converter Circuit DiagramNabendu GhoshNo ratings yet
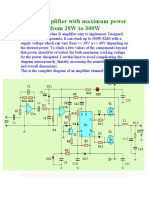
- Class D Amplifier With Maximum Power Adjustable From 20W To 300WDocument13 pagesClass D Amplifier With Maximum Power Adjustable From 20W To 300Wramontv032428100% (1)
- Class D Amplifier With Maximum Power Adjustable From 20W To 300WDocument13 pagesClass D Amplifier With Maximum Power Adjustable From 20W To 300Wramontv032428No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
- What Is in NameDocument2 pagesWhat Is in NameiarangoNo ratings yet
- Tucana-02 PDocument16 pagesTucana-02 PiarangoNo ratings yet
- 11 171 950 Height Adjustable Bed and AutDocument7 pages11 171 950 Height Adjustable Bed and AutiarangoNo ratings yet
- KY Meditation ProsperityDocument1 pageKY Meditation ProsperityPriscilla Saldivar MaldonadoNo ratings yet
- KY Meditation ProsperityDocument1 pageKY Meditation ProsperityPriscilla Saldivar MaldonadoNo ratings yet
- Design of Cmos BufferDocument5 pagesDesign of Cmos BufferVarunKaradesaiNo ratings yet
- Fundamentals of Satellite Communications Part 2: Link Analysis, Transmission, Path Loss, & ReceptionDocument50 pagesFundamentals of Satellite Communications Part 2: Link Analysis, Transmission, Path Loss, & Receptionmesutirmak7681100% (2)
- Frenophone 1923Document1 pageFrenophone 1923raineymj100% (1)
- W5100 Layout GuideDocument6 pagesW5100 Layout GuideGed L'Esparver100% (1)
- EC1308 Principles of Communication EngineeringDocument107 pagesEC1308 Principles of Communication EngineeringaaparumugamNo ratings yet
- DC Motor Direction Controller Using DPDT Relay PDFDocument1 pageDC Motor Direction Controller Using DPDT Relay PDFNguyen Phuoc HoNo ratings yet
- Data SheetDocument2 pagesData SheetRoy PongNo ratings yet
- RAS06 Delta Module2 Features & Main ParametersDocument123 pagesRAS06 Delta Module2 Features & Main ParametersRadiowiecNo ratings yet
- Install Mediatek Mt65xx Usb Vcom Drivers For Windows AllDocument79 pagesInstall Mediatek Mt65xx Usb Vcom Drivers For Windows Alladriano castroNo ratings yet
- Laboratory and Scientific EquipmentDocument3 pagesLaboratory and Scientific EquipmentFranco HidalgoNo ratings yet
- LM318HDocument19 pagesLM318HAlberto MarsicoNo ratings yet
- Contatore 7490Document5 pagesContatore 7490MatteoBavecchiNo ratings yet
- Tamil Stories - Siru Kathaigal - Ranja KumarDocument60 pagesTamil Stories - Siru Kathaigal - Ranja KumarSakthivel90% (10)
- Genius SW-HF 5.1 5000.rarDocument26 pagesGenius SW-HF 5.1 5000.rarzzorox100% (3)
- Specialist Diploma in M&E Coordination: Cable Television (CATV) Lesson By: Lim Ee Kiong RCDD / NTS SpecialistDocument63 pagesSpecialist Diploma in M&E Coordination: Cable Television (CATV) Lesson By: Lim Ee Kiong RCDD / NTS SpecialistSuthaNo ratings yet
- FM Stereo FM-AM Tuner: ST-SE500 ST-SE700Document64 pagesFM Stereo FM-AM Tuner: ST-SE500 ST-SE700al80al80100% (4)
- Radio Network Optimization Guideline (HAY) (R)Document40 pagesRadio Network Optimization Guideline (HAY) (R)Hiep Nguyen Dinh100% (1)
- IRF520Document8 pagesIRF520Anhell AzolNo ratings yet
- Precision Waveform Generator/Voltage Controlled Oscillator FeaturesDocument12 pagesPrecision Waveform Generator/Voltage Controlled Oscillator FeaturesCharles Tineo0% (1)
- ATPDraw Simulation of Switching TL500kV-00Document8 pagesATPDraw Simulation of Switching TL500kV-00Ratana KemNo ratings yet
- Engg CollegesDocument3,660 pagesEngg CollegeseraparnagoelNo ratings yet
- Manual T PDFDocument2 pagesManual T PDFmark solisNo ratings yet
- Error Code 14 Hi I Was Wondering What Error Code 14 Was On My Matrix Printer Model DFXDocument3 pagesError Code 14 Hi I Was Wondering What Error Code 14 Was On My Matrix Printer Model DFXJohny AllNo ratings yet
- Making Short-Circuit Calculations EasyDocument2 pagesMaking Short-Circuit Calculations EasymshahidshaukatNo ratings yet
- BOD and Small Meeting Room AV Solution QuotesDocument3 pagesBOD and Small Meeting Room AV Solution QuotesNinda SuryaniNo ratings yet
- Micro VoltmeterDocument6 pagesMicro Voltmeteranto_hardianto443No ratings yet
- SeminarDocument14 pagesSeminarKumar RaviNo ratings yet
- Not Gate Using Transistor - Google SearchDocument2 pagesNot Gate Using Transistor - Google SearchHimanshu KumarNo ratings yet
- Southwing UserGuide - SF350 Manos LibresDocument2 pagesSouthwing UserGuide - SF350 Manos LibresJorge Mainé DomínguezNo ratings yet
- Datasoft ListaDocument20 pagesDatasoft ListaNaciConSolNo ratings yet