International Journal Of Computational Engineering Research (ijceronline.com) Vol. 2 Issue.
5
Issn 2250-3005(online) September| 2012 Page1226
Oscillating Supersonic delta wing with Straight Leading Edges
1
Asha Crasta,
2
S.A. Khan
1. Research Scholar, Department of Mathematics, Jain University, Bangalore,
2. Principal, Department of Mechanical Engineering, P.A College of Engineering, Mangalore
Abstract:
A Supersonic similitude has been used to obtain stability derivatives in pitch and roll of a delta wing with straight leading edge
for the attached shock case. Ghoshs strip theory is been used in which strips at different span wise locations are independent
of each other. This combines with the similitude to give a piston theory which gives the closed form of solution to stability
derivatives in pitch and roll. Some of the results obtained have been compared with those of Hui et al ,Ghosh and Lui &Hui.
Results have been obtained for supersonic flow of perfect gas over a wide range of Mach numbers, incidences and sweep
angles.
Key Words: Aspect ratio, Attached shock wave, Delta wings, Damping derivative, Leading edge, Rolling derivative,
Stiffness derivative, Supersonic Flow, unsteady flow
1. Introduction
Sychevs [1] large incidence hypersonic similitude is applicable to a wing provided it has an extremely small span in addition
to small thickness. Cole and Brainered [2] have given a solution for a delta wing of very small span at large incidence.
Messiter [3] has found a solution, in the realm of thin shock layer theory, for a steady delta wing with a detached shock; the
attached shock case has been studied by Squire. Malmuth [5] obtained an analytical solution for the attached shock case at
small incidence based on hypersonic small disturbance theory. Pike [4] and Hui [6]have analytically treated the steady delta
wing in supersonic/hypersonic flow with an attached shock.
The role of dynamic stability at high incidence during re-entry or maneuver has been pointed out by Orlik-Ruckemann [7].
The shock-attached relatively high aspect ratio delta is often preferred (Townend) [8] for its high lift and drag ratio. Hui and
Hemdan [9] have studied the unsteady shock detached case in the context of thin shock layer theory. Lui and Hui [10] have
extended Huis theory to an oscillating delta. Hui et. al. [11] has treated flat wings of arbitrary plan forms oscillating in pitch
in supersonic/hypersonic flow. Ericsson [12] has used embedded Newtonian concept for unsteady flows. Ghosh [14] has
developed a large incidence 2-D hypersonic similitude and piston theory; it includes lighthills and Miles piston theories. This
theory has been applied for oscillating plane ogives. Ghosh [15] has extended the large deflection similitude to non-slender
cones, quasi cones and shock attached delta wings. This similitude in this paper has been extended to oscillating delta wings
with straight leading edges past a supersonic flow.
2. Analysis:
A thin strip of the wing, parallel to the centerline, can be considered independent of the z dimension when the velocity
component along the z direction is small. This has been discussed by Ghoshs [16]. The strip theory combined with Ghoshs
large incidence similitude leads to the piston analogy and pressure P on the surface can be directly related to equivalent
piston Mach number M
p
. In this case both Mp and flow deflections are permitted to be large. Hence light hill piston theory
[17] or miles strong shock piston theory cannot be used but Ghoshs piston theory will be applicable.
2
1
2 2
) ( 1
P P P
M B AM AM
P
P
+ + + =
, Where
P is free stream pressure (1)
Since strips at different span wise location are assumed independent of each other, the strip can be considered as a flat plate at
an angle of attack. The angle of incidence is same as that of wing. Angle | is the angle between the shock and the strip. A
piston theory which has been used in equation (1) has been extended to supersonic flow. The expression is given below.
2
1
2 2
) )
cos
( )(
cos
( )
cos
( 1
| | |
p p p
M
B
M
A
M
A
p
p
+ + + =
(2)
Where
p is free stream pressure,
, ) 1 /( 4 ( ,
4
) 1 (
2
+ =
+
= B A is the specific heat ratio and =
p
M the local piston
Mach number normal to the wedge surface.
International Journal Of Computational Engineering Research (ijceronline.com) Vol. 2 Issue. 5
Issn 2250-3005(online) September| 2012 Page1227
2.1 Pitching moment derivatives
Let the mean incidence be
0
o for the wing oscillating in pitch with small frequency and amplitude about an axis
0
x . The
piston velocity and hence pressure on the windward surface remains constant on a span wise strip of length 2z at x. The
pressure on the lee surface is assumed Zero. Therefore the nose up moment is
}
=
c
dx x x z p m
0
0
) ( . 2 (3)
The stiffness derivative is non-dimensionalized by dividing with the product of dynamic pressure, wing area and chord length.
|
.
|
\
|
c
c
=
=
=
o o o
c
o
m
q
m
C U
C
0
3 2
0
cot
2
(4)
The damping derivative is non-dimensionalised by dividing with the product of dynamic pressure, wing area, chord length and
characteristic time factor
|
|
.
|
\
|
U
c
0
) (
) (cot
2
4
=
=
c
c
=
q
q
C
q
m
c U
m
o
o o
c
(5)
The local piston Mach number normal to the wing surface is given by
) ( sin
o
o x x
a
q
M M
p
+ =
(6)
Where
, are density and velocity of sound in the free stream? Combining (2) through (6), differentiation under the
integral sign is performed.
Defining ,
|
o
o
cos
sin
1
=
M
S , the derivatives in pitch of a delta wing become equal to
|
o o
o o
o 2
1
cos
) ( cos sin S f
C
m
=
(
)
3
2
( h (7)
(
+ = )
2
1
3
4
(
cos
) ( sin
2
2
1
h h
S f
C
q
m
|
o
o
(8)
Where = ) (
1
S f ] ) 2 /( 2 ( 2 [
2
1 (
2
1
2
1
2
1
1
1
S B S B S
S
r
+ + +
+
(9)
2.2Rolling Damping Derivative:
Let the rate of roll be p and rolling moment be L, defined according to the right hand system of reference.
dx zdz p L
x f Z c
) . ( 2
) (
0 0
} }
=
= (10)
The piston Mach number is given by
p
a
z
M M
p
= o sin (11)
The roll damping derivative is non-dimensionalized by dividing with the product of dynamic pressure, wing area, and span
and characteristic time factor
U
C
International Journal Of Computational Engineering Research (ijceronline.com) Vol. 2 Issue. 5
Issn 2250-3005(online) September| 2012 Page1228
|
|
.
|
\
|
c
c
=
=
=
p
L
p
l
b C U
C
P
0
3
0
cot
1
o o
c
(12)
Combining through (10) to (12)
P
l
C =
(
(
12
cot
) (cos
) ( sin
2
1
c
|
o
o
S f
(13)
Where = ) (
1
S f ] ) 2 /( 2 ( 2 [
2
1 (
2
1
2
1
2
1
1
1
S B S B S
S
r
+ + +
+
3. Results and discussions:
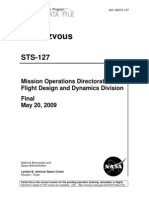
The variation of the stability derivatives with pivot position for various Mach numbers and angle of incidence is shown in
Figs. 1 to 4. The stiffness and damping derivative have been compared with Hui et al. (Fig 5. to Fig. 8).The Stiffness
derivative shows good agreement. The difference in the damping derivative is attributed to the present theory being a quasi-
steady one whereas Liu and Hui [13] give an unsteady theory which predicts
.
The present work invokes strip theory
arguments. Hui et al [11] also use strip theory arguments whereby the flow at any span wise station is considered equivalent to
an oscillating flat plate flow; this is calculated by perturbing the known steady flat plate flow (oblique shock solution) which
serves as the basic flow for the theory. For a pitching wing the mean incidence is the same for all strips (irrespective of
span wise location) and hence there is a single basic flow which Hui et al have utilized to obtain closed form expression for
stiffness and damping derivatives. They have not calculated the roll damping derivative. For a rolling wing the strips are at
different incidences and there is no single basic flow; hence it is doubtful whether approach can be extended to yield a closed
form expression for roll damping derivative. Their theory is valid for supersonic as well as hypersonic flows; whereas the
present theory also gives closed form expressions for Stiffness & damping derivatives in pitch as well as roll damping
derivative. Liu and Huis [10] theory is more accurate than of Hui et al [11] as far hypersonic flow is concerned.
The present theory is in good agreement with Hui et al [11] for angle of incidence up to thirty degrees and then there is no
matching with the results of Hui et al [11]. This may be due to the detachment of the shock wave and stalling of the flow (Fig.
8). The present theory is simpler than both Liu and Hui [9] and Hui et al [13] and brings out the explicit dependence of the
derivatives on the similarity parameters S1. (Fig. 9). Fig.10 presents the variation of damping derivatives with pivot position.
There is a disagreement with Liu & Hui [9] as well as Hui [13] and the reasons for the disagreement are the same as discussed
earlier. Fig. 11, Fig.12, and Fig.13 present the variation of damping derivatives with mean flow incidence for h = 0, h= 1.0 and
h = 0.6. They are in disagreement with Liu & Hui [9] as well as Hui [13] for the angle of incidence more than thirty degrees.
This may be due to the detachment of the shock wave and stalling of the flow. Fig.14 and Fig. 15 show the dependence of Roll
damping derivative with Mach number and with the aspect ratio. The roll damping derivative decreases with Mach number
initially then confirms the Mach number independence principle for large Mach numbers. Further, the roll damping derivative
increases with aspect ratio of the wing.
There was an error in the formulation in Ghosh [16] for roll damping derivatives and hence in the present work the same has
been corrected and implemented
0.0 0.2 0.4 0.6 0.8 1.0
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
-
C
m
o
h
M = 1.5
M = 2
M = 2.5
M = 3
M = 3.5
M = 4
Fig.1: Variation of Stiffness derivative with pivot position
0
=25
International Journal Of Computational Engineering Research (ijceronline.com) Vol. 2 Issue. 5
Issn 2250-3005(online) September| 2012 Page1229
0.0 0.2 0.4 0.6 0.8 1.0
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
1.6
1.8
-
C
m
o
h
o = 5
o = 15
o = 25
o = 35
o = 45
Fig. 2: Variation of stiffness derivative with the pivot position
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.2
0.4
0.6
0.8
1.0
1.2
-
C
m
q
h
M = 2
M = 2.5
M = 3
M = 3.5
M = 4
Fig. 3: Variation of Damping derivative with pivot position
0
=25
0.0 0.2 0.4 0.6 0.8 1.0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
-
C
m
q
h
o = 5
o =15
o = 25
o = 35
o = 45
Fig. 4: Variation of damping derivative with pivot position
Fig. 5: Variation of Damping Derivative of a Wing with Pivot position with M=3,
0
=10 ,=1.4
Fig. 6: Variation of Stiffness Derivative of a Wing with Pivot position with M=2.47,
0
=651', =1.4
International Journal Of Computational Engineering Research (ijceronline.com) Vol. 2 Issue. 5
Issn 2250-3005(online) September| 2012 Page1230
Fig. 7: Comparison of Stiffness Derivative with Theory of Liu and Hui for Triangular Wing with M=4,
0
= 15
0
, =1.4
Fig. 8: Comparison of Damping Derivative of Triangular Wing with M=4,
0
=15
0
, =1.4
Fig.9: Stiffness Derivative Vs Pivot Position for M= 4,
0
= 15
0
, = 1.4
International Journal Of Computational Engineering Research (ijceronline.com) Vol. 2 Issue. 5
Issn 2250-3005(online) September| 2012 Page1231
Fig. 10: Damping Derivative Vs Pivot Position for M=4,
0
= 15
0
, =1.4
Fig. 11: Variation of Stability Derivatives with Mean Flow Incidence with M=4,
0
=15
0
,Pivot position, h=0
Fig. 12: Variation of Stability Derivative with Mean Flow Incidence with M=4,
0
= 15
0
Pivot position, h = 1
International Journal Of Computational Engineering Research (ijceronline.com) Vol. 2 Issue. 5
Issn 2250-3005(online) September| 2012 Page1232
Fig.13: Variation of Stability Derivative Vs Mean Flow Incidence with M=4,
0
= 15
0
, Pivot position, h = 0.6
Fig.14: Rolling Moment Derivative Vs Mach number with Aspect Ratio, AR= 4.764,
0
= 25
0
, =1.4
Fig.15: Roll Damping Derivative Vs Aspect Ratio of Delta Wings with M = 10
International Journal Of Computational Engineering Research (ijceronline.com) Vol. 2 Issue. 5
Issn 2250-3005(online) September| 2012 Page1233
References
[1.] Sychev, V. V, Three Dimensional Hypersonic Gas flow Past Slender Bodies at High Angles of Attack, Journal of
Applied Mathematics and Mechanics, Vol. 24, Aug. 1960, pp. 296-306.
[2.] Cole, J.D. and Brainerd, J. J., Slender wings at high angles of attack in hypersonic flow, ARS Reprint 1980-61, 1961.
[3.] Messiter, A.F., Lift of slender delta wings according to Newtonian theory, AIAA Journal, 1963, 1, 794-802.
[4.] Pike. J.The pressure on flat and anhydral delta wings with attached shock waves, the Aeronautical Quarterly, November
1972, XXIII, Part 4, pp. 253-262.
[5.] Malmuth, N. D., Hypersonic flow over a delta wing of moderate aspect ratio, AIAA Journal, 1966, 4, pp. 555-556.
[6.] Hui, W. H., Supersonic and hypersonic flow with attached shock waves over delta wings, Proc. of Royal Society,
London, 1971, A. 325, pp. 251-268.
[7.] Orlik-Ruckemann, K.J., Dynamic stability testing of aircraft needs versus capabilities, Progress in the Aerospace
Sciences, Academic press, N.Y., 1975, 16, pp. 431- 447.
[8.] Towend, L. H., Some design aspects of space shuttle Orbiters, RAE TR 70139, 1970.
[9.] Hui, W. H. and Hemdan, H. T., Unsteady hypersonic flow over delta wings with detached shock waves, AIAA
Journal, April 1976 , 14, pp. 505-511.
[10.] Lui D. D. and Hui W. H., Oscillating delta wings with attached shock waves, AIAA Journal, June 1977, 15, 6, pp.
804-812.
[11.] Hui,W. H., Platzer, M. F. and Youroukos E., Oscillating supersonic/hypersonic wings at high incidence, AIAA
Journal, March 1982, 20, pp. 299-304.
[12.] Ericsson L. E., Viscous and Elastic Perturbation Effects on Hypersonic Unsteady Airfoil Aerodynamics, AIAA
Journal, Vol.15 Oct. 1977, pp. 1481-1490.
[13.] Hui, W. H., Stability of Oscillating Wedges and Caret Wings in Hypersonic and Supersonic Flows, AIAA Journal,
Vol. 7, August 1969, pp. 1524-1530.
[14.] Ghosh, K. and Mistry, B. K., Large incidence hypersonic similitude and oscillating non-planar wedges, AIAA
Journal, August 1980, 18, 8, 1004-1006.
[15.] Ghosh K., Hypersonic large-deflection similitude for quasi wedges and quasi-cones, The Aeronautical Journal, March
1984, 88, 873, pp. 70-76.
[16.] G hosh K., Hypersonic large deflection similitude for oscillating delta wings, The Aeronautical journal, Oct. 1984,
pp. 357-361.
[17.] LightHill M. J., Oscillating Aerofoil at High Mach Numbers, Journal of Aeronautical Sciences, Vol. 20, June 1953,
pp. 402-406.
You might also like
- 2te Bereicht EntwurfDocument15 pages2te Bereicht EntwurfmandbackNo ratings yet
- A Fast Wheel-Rail Forces Calculation Computer CodeDocument13 pagesA Fast Wheel-Rail Forces Calculation Computer CodeMattia IaconoNo ratings yet
- Active Control For Panel Transmission Loss ImprovementDocument9 pagesActive Control For Panel Transmission Loss ImprovementVictor CaceresNo ratings yet
- Numerical Wave Tank For Study Seakeeping of Amphibious VehicleDocument4 pagesNumerical Wave Tank For Study Seakeeping of Amphibious VehicleBinod KumarNo ratings yet
- Doctors 2023Document24 pagesDoctors 2023Helen DoctorsNo ratings yet
- Berry Phase Patrick BrunoDocument33 pagesBerry Phase Patrick Brunodyegu1No ratings yet
- Wave Equation Applications in Peridynamic Model: Hisham M. Ali HasanDocument5 pagesWave Equation Applications in Peridynamic Model: Hisham M. Ali Hasansar0000No ratings yet
- 35IJMPERDAPR201935Document14 pages35IJMPERDAPR201935TJPRC PublicationsNo ratings yet
- Behaviour of bolted circular flange joints under bending & axial loadsDocument10 pagesBehaviour of bolted circular flange joints under bending & axial loadsarkadjyothiprakashNo ratings yet
- 13 - Applications of DerivativesDocument9 pages13 - Applications of DerivativeskapilNo ratings yet
- SPH simulation of hydrodynamic problemsDocument13 pagesSPH simulation of hydrodynamic problemsJohnKartmanNo ratings yet
- Short Pile DesignDocument9 pagesShort Pile DesignScooby Doo100% (1)
- Simultation ARTICLE 17-12-2022Document19 pagesSimultation ARTICLE 17-12-2022znikerNo ratings yet
- Journal of Applied Mathematics and Mechanics steady flow analysisDocument7 pagesJournal of Applied Mathematics and Mechanics steady flow analysisTubaguts1234No ratings yet
- Waves and Forces on Circular Bridge SupportDocument6 pagesWaves and Forces on Circular Bridge SupportLava SatNo ratings yet
- 2011JMPDocument5 pages2011JMPMarco Vinicio VazquezNo ratings yet
- SCI, Mekanik, KTH 1Document11 pagesSCI, Mekanik, KTH 1張祐瑜No ratings yet
- 6325 05 PDFDocument33 pages6325 05 PDFMatias Montenegro MancillaNo ratings yet
- 01 - Anagnostou Torino 2008Document50 pages01 - Anagnostou Torino 2008JinChongNo ratings yet
- Appropriate boundary conditions for computational wind engineering models using the k-ε turbulence modelDocument9 pagesAppropriate boundary conditions for computational wind engineering models using the k-ε turbulence modelSiti Rohani IsdrisNo ratings yet
- Gear fatigue life prediction modelDocument1 pageGear fatigue life prediction modelJaimeNo ratings yet
- Unsteady Rotor-Stator Interaction in A Low Pressure Centrifugal CompressorDocument6 pagesUnsteady Rotor-Stator Interaction in A Low Pressure Centrifugal CompressorbaubaumihaiNo ratings yet
- Fundamentals of Convection Heat TransferDocument4 pagesFundamentals of Convection Heat TransferErj DaniyaroffNo ratings yet
- 3 Basinc Ve Akiskan StatigiDocument7 pages3 Basinc Ve Akiskan Statigiizzet9696No ratings yet
- Indian Association of Physics Teachers National Standard Examinations 2008 - 2009 Solutions / AnswersDocument7 pagesIndian Association of Physics Teachers National Standard Examinations 2008 - 2009 Solutions / AnswersKshitij SharmaNo ratings yet
- Bearing Deformation Impact on Pressure Field and Hydrodynamic CharacteristicsDocument8 pagesBearing Deformation Impact on Pressure Field and Hydrodynamic CharacteristicsSirajuddin ANo ratings yet
- Buckled Beam Nonlinear VibrationDocument10 pagesBuckled Beam Nonlinear Vibrationhmsedighi459No ratings yet
- Approximation To The Hydrodynamics of Oating Pontoons Under Oblique WavesDocument20 pagesApproximation To The Hydrodynamics of Oating Pontoons Under Oblique WavesÖmer SukasNo ratings yet
- 296 General Solution of Thick Plates On Winkler-Pasternak - EJEST-V4 (4) 1-14+Document14 pages296 General Solution of Thick Plates On Winkler-Pasternak - EJEST-V4 (4) 1-14+gmpintorNo ratings yet
- Seismology Problem Set 1 4Document11 pagesSeismology Problem Set 1 4Goldy BanerjeeNo ratings yet
- Perfectly Matched Layers - An Absorbing Boundary Condition For Elastic Wave PropagationDocument9 pagesPerfectly Matched Layers - An Absorbing Boundary Condition For Elastic Wave PropagationjosifNo ratings yet
- A Mathematical Model For The Thrust Force Generated by A Apping Elastic WingDocument5 pagesA Mathematical Model For The Thrust Force Generated by A Apping Elastic WingGCVishnuKumarNo ratings yet
- An Improved Method For The Theoretical Prediction of The Wave Resistance of Transom-Stern Hulls Using A Slender Body ApproachDocument18 pagesAn Improved Method For The Theoretical Prediction of The Wave Resistance of Transom-Stern Hulls Using A Slender Body ApproachhaujesNo ratings yet
- Implementation of The Contensou-Erismann Model ofDocument12 pagesImplementation of The Contensou-Erismann Model ofJarek PlaszczycaNo ratings yet
- A New Approach For Magnetic Curves in Riemannian ManifoldsDocument15 pagesA New Approach For Magnetic Curves in Riemannian ManifoldsmarkrichardmuradNo ratings yet
- Shear Band Formation in Granular Materials: A Micromechanical ApproachDocument7 pagesShear Band Formation in Granular Materials: A Micromechanical ApproachgeoanagoNo ratings yet
- Timoshenko CoefficientDocument6 pagesTimoshenko CoefficientwarterflyNo ratings yet
- 2004 Behaviour ICJDocument8 pages2004 Behaviour ICJshilp88No ratings yet
- A New Mixed Model Based On The Velocity Structure FunctionDocument16 pagesA New Mixed Model Based On The Velocity Structure FunctioncarlosfnbsilvaNo ratings yet
- Problem Set 3Document4 pagesProblem Set 3ReemALMousawiNo ratings yet
- For The Numerical Simulation of Waves: Absorbing Boundary ConditionsDocument23 pagesFor The Numerical Simulation of Waves: Absorbing Boundary Conditionsleobruno210No ratings yet
- INVESTIGATION OF AIR FILM CONVEYOR PRESSURISEDDocument9 pagesINVESTIGATION OF AIR FILM CONVEYOR PRESSURISEDluong van toiNo ratings yet
- Sound WavesDocument19 pagesSound WavesbenyfirstNo ratings yet
- Thin Airfoil Theory ExplainedDocument10 pagesThin Airfoil Theory ExplainedAli Al-hamalyNo ratings yet
- HydrodynamicsDocument122 pagesHydrodynamicsIustin Cristian100% (2)
- A Method of Approximate Tool Wear Analysis in Cold Roll FormingDocument6 pagesA Method of Approximate Tool Wear Analysis in Cold Roll FormingAly MahdyNo ratings yet
- Thin Airfoil TheoryDocument10 pagesThin Airfoil TheoryAli Al-hamalyNo ratings yet
- P (O) 0 P (O) - tr/2:: 0:: +tr/2 (!!P (O) Do: (Ja (JCDocument2 pagesP (O) 0 P (O) - tr/2:: 0:: +tr/2 (!!P (O) Do: (Ja (JCvisvisvisvisNo ratings yet
- Simulation of 6DOF Motion of 3D Flying DebrisDocument8 pagesSimulation of 6DOF Motion of 3D Flying DebrisSara SultanaNo ratings yet
- Nonlinear Impact Response of Doubly Curved Composite ShellsDocument6 pagesNonlinear Impact Response of Doubly Curved Composite ShellsVenkata Swamy Naidu NeigapulaNo ratings yet
- Fatigue Crack Growth Behavior of Subsurface Crack in Rolling ContactDocument12 pagesFatigue Crack Growth Behavior of Subsurface Crack in Rolling ContactankitsarvaiyaNo ratings yet
- Biryukov 2002Document5 pagesBiryukov 2002georgeqin75No ratings yet
- Dynamic Interaction of Surface Machine Foundations Under Vertical Harmonic ExcitationDocument18 pagesDynamic Interaction of Surface Machine Foundations Under Vertical Harmonic ExcitationSayed ElarabyNo ratings yet
- Distance-Redshift Relations in An Anisotropic Cosmological ModelDocument8 pagesDistance-Redshift Relations in An Anisotropic Cosmological ModelzrbutkNo ratings yet
- Plakhtienko 2002Document8 pagesPlakhtienko 2002sonu mathewNo ratings yet
- Free Vibrations of Simply Supported Beams Using Fourier SeriesDocument17 pagesFree Vibrations of Simply Supported Beams Using Fourier SeriesMauro GuerreiroNo ratings yet
- Wave-Current Interaction Model On An Exponential ProfileDocument10 pagesWave-Current Interaction Model On An Exponential ProfileInternational Journal of computational Engineering research (IJCER)No ratings yet
- The Effect of Bottom Sediment Transport On Wave Set-UpDocument10 pagesThe Effect of Bottom Sediment Transport On Wave Set-UpInternational Journal of computational Engineering research (IJCER)No ratings yet
- Analysis of Metamaterial Based Microstrip Array AntennaDocument2 pagesAnalysis of Metamaterial Based Microstrip Array AntennaInternational Journal of computational Engineering research (IJCER)No ratings yet
- A Real Time Abandoned Object Detection and Addressing Using IoTDocument5 pagesA Real Time Abandoned Object Detection and Addressing Using IoTInternational Journal of computational Engineering research (IJCER)No ratings yet
- Stiffness Analysis of Two Wheeler Tyre Using Air, Nitrogen and Argon As Inflating FluidsDocument8 pagesStiffness Analysis of Two Wheeler Tyre Using Air, Nitrogen and Argon As Inflating FluidsInternational Journal of computational Engineering research (IJCER)No ratings yet
- An Analysis of The Implementation of Work Safety System in Underpass Development Projects of The Intersection of Mandai Makassar-IndonesiaDocument5 pagesAn Analysis of The Implementation of Work Safety System in Underpass Development Projects of The Intersection of Mandai Makassar-IndonesiaInternational Journal of computational Engineering research (IJCER)No ratings yet
- Analysis of The Pedestrian System in Jayapura City (A Case Study of Pedestrian Line On Percetakan StreetDocument9 pagesAnalysis of The Pedestrian System in Jayapura City (A Case Study of Pedestrian Line On Percetakan StreetInternational Journal of computational Engineering research (IJCER)No ratings yet
- An Analysis of The Noise Level at The Residential Area As The Impact of Flight Operations at The International Airport of Sultan Hasanuddin Maros in South Sulawesi ProvinceDocument4 pagesAn Analysis of The Noise Level at The Residential Area As The Impact of Flight Operations at The International Airport of Sultan Hasanuddin Maros in South Sulawesi ProvinceInternational Journal of computational Engineering research (IJCER)No ratings yet
- Drag Optimization of Bluff Bodies Using CFD For Aerodynamic ApplicationsDocument8 pagesDrag Optimization of Bluff Bodies Using CFD For Aerodynamic ApplicationsInternational Journal of computational Engineering research (IJCER)No ratings yet
- A Real Time Abandoned Object Detection and Addressing Using IoTDocument5 pagesA Real Time Abandoned Object Detection and Addressing Using IoTInternational Journal of computational Engineering research (IJCER)No ratings yet
- The Influence of Price Offers For Procurement of Goods and Services On The Quality of Road ConstructionsDocument7 pagesThe Influence of Price Offers For Procurement of Goods and Services On The Quality of Road ConstructionsInternational Journal of computational Engineering research (IJCER)No ratings yet
- The Influence of Price Offers For Procurement of Goods and Services On The Quality of Road ConstructionsDocument7 pagesThe Influence of Price Offers For Procurement of Goods and Services On The Quality of Road ConstructionsInternational Journal of computational Engineering research (IJCER)No ratings yet
- Parametric Study On Analysis and Design of Permanently Anchored Secant Pile Wall For Earthquake LoadingDocument16 pagesParametric Study On Analysis and Design of Permanently Anchored Secant Pile Wall For Earthquake LoadingInternational Journal of computational Engineering research (IJCER)No ratings yet
- Parametric Study On Analysis and Design of Permanently Anchored Secant Pile Wall For Earthquake LoadingDocument16 pagesParametric Study On Analysis and Design of Permanently Anchored Secant Pile Wall For Earthquake LoadingInternational Journal of computational Engineering research (IJCER)No ratings yet
- Comparison of Different Evapotranspiration Estimation Techniques For Mohanpur, Nadia District, West BengalDocument7 pagesComparison of Different Evapotranspiration Estimation Techniques For Mohanpur, Nadia District, West BengalInternational Journal of computational Engineering research (IJCER)No ratings yet
- Modeling The Frictional Effect On The Rip Current On A Linear Depth ProfileDocument6 pagesModeling The Frictional Effect On The Rip Current On A Linear Depth ProfileInternational Journal of computational Engineering research (IJCER)No ratings yet
- Urban Town PlanningDocument4 pagesUrban Town PlanningInternational Journal of computational Engineering research (IJCER)No ratings yet
- PCB Faults Detection Using Image ProcessingDocument5 pagesPCB Faults Detection Using Image ProcessingInternational Journal of computational Engineering research (IJCER)No ratings yet
- Multi-Response Optimization of WEDM Process Parameters of Monel 400 Using Integrated RSM and GADocument8 pagesMulti-Response Optimization of WEDM Process Parameters of Monel 400 Using Integrated RSM and GAInternational Journal of computational Engineering research (IJCER)No ratings yet
- Investigation of Vibration On Suspension Systems at Different Load and Operating ConditionsDocument5 pagesInvestigation of Vibration On Suspension Systems at Different Load and Operating ConditionsInternational Journal of computational Engineering research (IJCER)No ratings yet
- Modelling, Fabrication & Analysis of Pelton Turbine For Different Head and MaterialsDocument17 pagesModelling, Fabrication & Analysis of Pelton Turbine For Different Head and MaterialsInternational Journal of computational Engineering research (IJCER)No ratings yet
- A Holistic Approach For Determining The Characteristic Flow On Kangsabati CatchmentDocument8 pagesA Holistic Approach For Determining The Characteristic Flow On Kangsabati CatchmentInternational Journal of computational Engineering research (IJCER)No ratings yet
- Time-History Analysis On Seismic Stability of Nuclear Island Bedrock With Weak InterlayerDocument9 pagesTime-History Analysis On Seismic Stability of Nuclear Island Bedrock With Weak InterlayerInternational Journal of computational Engineering research (IJCER)No ratings yet
- Effect of The Nipah Mall Development On The Performance Roads of Urip Sumohardjo in Makassar CityDocument5 pagesEffect of The Nipah Mall Development On The Performance Roads of Urip Sumohardjo in Makassar CityInternational Journal of computational Engineering research (IJCER)No ratings yet
- Anatomy of The Traffic Accidents On The RoadDocument6 pagesAnatomy of The Traffic Accidents On The RoadInternational Journal of computational Engineering research (IJCER)No ratings yet
- Location of Zeros of PolynomialsDocument7 pagesLocation of Zeros of PolynomialsInternational Journal of computational Engineering research (IJCER)No ratings yet
- Wi MAX Deinter Leaver's Address Generation Unit Through FPGA ImplementationDocument3 pagesWi MAX Deinter Leaver's Address Generation Unit Through FPGA ImplementationInternational Journal of computational Engineering research (IJCER)No ratings yet
- Study of The Class and Structural Changes Caused by Incorporating The Target Class Guided Feature Subsetting in High Dimensional DataDocument13 pagesStudy of The Class and Structural Changes Caused by Incorporating The Target Class Guided Feature Subsetting in High Dimensional DataInternational Journal of computational Engineering research (IJCER)No ratings yet
- Effect of Turbulence Model in Numerical Simulation of Single Round Jet at Low Reynolds NumberDocument16 pagesEffect of Turbulence Model in Numerical Simulation of Single Round Jet at Low Reynolds NumberInternational Journal of computational Engineering research (IJCER)No ratings yet
- An Evaluation of The Taxi Supply Management at The International Airport of Sultan Hasanuddin in Makassar - IndonesiaDocument4 pagesAn Evaluation of The Taxi Supply Management at The International Airport of Sultan Hasanuddin in Makassar - IndonesiaInternational Journal of computational Engineering research (IJCER)No ratings yet
- Spacecraft Dynamics and Control: Matthew M. PeetDocument33 pagesSpacecraft Dynamics and Control: Matthew M. PeetJORGE IVAN ZULUAGA CALLEJASNo ratings yet
- TheAvionicsHandbook Cap 31 PDFDocument16 pagesTheAvionicsHandbook Cap 31 PDFfernandoabel01No ratings yet
- Mathematical Modeling and Control of A Tilt-Rotor Aircraft: Aerospace Science and Technology December 2015Document21 pagesMathematical Modeling and Control of A Tilt-Rotor Aircraft: Aerospace Science and Technology December 2015gauravamberkarNo ratings yet
- Direct Operating Cost AircraftDocument44 pagesDirect Operating Cost AircraftusakalambaNo ratings yet
- Tips Needed - How To Diagnose A Badly Rigged Plane - Backcountry PilotDocument8 pagesTips Needed - How To Diagnose A Badly Rigged Plane - Backcountry PilotMohamed OmarNo ratings yet
- Boeing Bullettin On Stall and RecoveryDocument7 pagesBoeing Bullettin On Stall and RecoveryDavid Kress-ChengNo ratings yet
- Delta Wing Force MeasurementDocument3 pagesDelta Wing Force MeasurementVenkatesh SurampallyNo ratings yet
- Analyzing Space Rapid Response Key Technologies Based on Data Relay SystemDocument4 pagesAnalyzing Space Rapid Response Key Technologies Based on Data Relay SystemMano DanoNo ratings yet
- Large Antennas Structural AnalysisDocument23 pagesLarge Antennas Structural AnalysisayhunNo ratings yet
- NASA 112341main Solar Sail FSDocument2 pagesNASA 112341main Solar Sail FSNASAdocumentsNo ratings yet
- Aerodynamics 2 Exam #1Document8 pagesAerodynamics 2 Exam #1Kisna BhurtelNo ratings yet
- DGCA APPROVED CAR-147 ORGANISATIONSDocument4 pagesDGCA APPROVED CAR-147 ORGANISATIONSIshant JaiswalNo ratings yet
- Model Rocketry ProjectsDocument14 pagesModel Rocketry ProjectsAviation/Space History LibraryNo ratings yet
- JFSM Active Flow ControlDocument9 pagesJFSM Active Flow ControlFahmi IzzuddinNo ratings yet
- Post Launch Report For Apollo Mission A-101 (BP-13)Document217 pagesPost Launch Report For Apollo Mission A-101 (BP-13)Bob AndrepontNo ratings yet
- Autopilot SystemDocument32 pagesAutopilot Systemdev achandyNo ratings yet
- CH-47 Theory of OperationsDocument502 pagesCH-47 Theory of Operationsjetaw109sp100% (4)
- Pilot Training-Manual Cessna-Citation-Bravo PDFDocument270 pagesPilot Training-Manual Cessna-Citation-Bravo PDFEnrique Alva Quintero100% (5)
- Additive DragDocument10 pagesAdditive DragFahad AliNo ratings yet
- Ice Protection SystemDocument5 pagesIce Protection Systemhardik033No ratings yet
- 17 Recovery From Unusual AttitudesDocument8 pages17 Recovery From Unusual AttitudesAnonymous yekn8BdNo ratings yet
- NASA STS-127 ISS Rendezvous ManualDocument225 pagesNASA STS-127 ISS Rendezvous ManualOrion2015100% (1)
- IAP Charts (FIR - VI)Document41 pagesIAP Charts (FIR - VI)sunil kumarNo ratings yet
- A300-600 FMS Pilot's GuideDocument441 pagesA300-600 FMS Pilot's GuidePunthep Punnotok100% (1)
- Performance Analysis of NACA2420 As Wind Turbine PropellerDocument13 pagesPerformance Analysis of NACA2420 As Wind Turbine PropellerUswah PawaraNo ratings yet
- 22 Auto Flight System Presentation (1) : A330-200/300 Technical Training ManualDocument28 pages22 Auto Flight System Presentation (1) : A330-200/300 Technical Training ManualElijah Paul MertoNo ratings yet
- Pkocs/02 Mar/Upg-Sub: - Not For Real World NavigationDocument22 pagesPkocs/02 Mar/Upg-Sub: - Not For Real World NavigationLendyNo ratings yet
- Xfoil TutorialDocument10 pagesXfoil Tutorialeafz111No ratings yet
- Amanze Ejiogu Background BreifingDocument11 pagesAmanze Ejiogu Background Breifingapi-202731854No ratings yet
- HAF F16 Supplement PDFDocument722 pagesHAF F16 Supplement PDFDave91No ratings yet