You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Host Interface Manual - U411 PDFDocument52 pagesHost Interface Manual - U411 PDFValentin Ghencea50% (2)
- Use Case Diagram For Employee Management SystemDocument60 pagesUse Case Diagram For Employee Management SystemAnant JaiswalNo ratings yet
- Astm F 30 - 96 R02 - RJMWDocument5 pagesAstm F 30 - 96 R02 - RJMWphaindikaNo ratings yet
- Qualcast 46cm Petrol Self Propelled Lawnmower: Assembly Manual XSZ46D-SDDocument28 pagesQualcast 46cm Petrol Self Propelled Lawnmower: Assembly Manual XSZ46D-SDmark simpsonNo ratings yet
- General Construction Notes: FC Engineering ServicesDocument1 pageGeneral Construction Notes: FC Engineering ServicesMac KYNo ratings yet
- A New Finite Element Based On The Strain Approach For Linear and Dynamic AnalysisDocument6 pagesA New Finite Element Based On The Strain Approach For Linear and Dynamic AnalysisHako KhechaiNo ratings yet
- Wastewater Treatment Options For Paper Mills Using Waste Paper/imported Pulps As Raw Materials: Bangladesh PerspectiveDocument4 pagesWastewater Treatment Options For Paper Mills Using Waste Paper/imported Pulps As Raw Materials: Bangladesh PerspectiveKool LokeshNo ratings yet
- 1996 Club Car DS Golf Cart Owner's ManualDocument48 pages1996 Club Car DS Golf Cart Owner's Manualdriver33b60% (5)
- Activation and Deactivation of CatalystsDocument16 pagesActivation and Deactivation of Catalystsshan0214No ratings yet
- Build A 10 Ton Hydraulic PressDocument10 pagesBuild A 10 Ton Hydraulic PressManuel SterlingNo ratings yet
- 1SDA066479R1 Rhe xt1 xt3 F P Stand ReturnedDocument3 pages1SDA066479R1 Rhe xt1 xt3 F P Stand ReturnedAndrés Muñoz PeraltaNo ratings yet
- Tda - 2002 PDFDocument19 pagesTda - 2002 PDFJose M PeresNo ratings yet
- KSB - Submersible Pump - Ama Porter 501 SEDocument30 pagesKSB - Submersible Pump - Ama Porter 501 SEZahid HussainNo ratings yet
- 2 Strokes 4 Strokes: 1 CylinderDocument2 pages2 Strokes 4 Strokes: 1 CylinderariffNo ratings yet
- Encore 7.1 BoxDocument10 pagesEncore 7.1 BoxNicolas HarambilletNo ratings yet
- Metric DIN 434 Square Taper Washers: Visit Our For Product AvailabilityDocument4 pagesMetric DIN 434 Square Taper Washers: Visit Our For Product AvailabilityRodrigoNo ratings yet
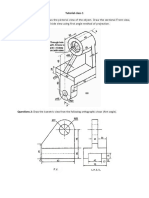
- Tutorial Class 1 Questions 1Document2 pagesTutorial Class 1 Questions 1Bố Quỳnh ChiNo ratings yet
- Introduction Compression TestDocument7 pagesIntroduction Compression TestEr Dinesh TambeNo ratings yet
- CambuzaDocument45 pagesCambuzaMia Marin Pâslaru100% (2)
- VarPlus Can - BLRCH104A125B48Document2 pagesVarPlus Can - BLRCH104A125B48Achira DasanayakeNo ratings yet
- Technical Owner Manual Nfinity v6Document116 pagesTechnical Owner Manual Nfinity v6Tom MondjollianNo ratings yet
- Surveying Civil Engineering Pictorial Booklet 15 English MediumDocument125 pagesSurveying Civil Engineering Pictorial Booklet 15 English MediumtnstcnpalanisamyNo ratings yet
- 2017 Petro Skills FacilitiesDocument44 pages2017 Petro Skills FacilitiesChirlly Ulai100% (1)
- 2012 D61ex-15e0Document1,239 pages2012 D61ex-15e0Alex San Tana100% (3)
- JAVA Stack Installation in ERPDocument2 pagesJAVA Stack Installation in ERPsai_balaji_8No ratings yet
- DFM54 EngDocument2 pagesDFM54 EngAnonymous KWO434No ratings yet
- JLG 600A 660AJ From Serial 0300177361 Service Manual (1) (1) Gabriel DSDDocument4 pagesJLG 600A 660AJ From Serial 0300177361 Service Manual (1) (1) Gabriel DSDCASAQUI LVANo ratings yet
- Kaltreparatur-Textil WT2332 enDocument20 pagesKaltreparatur-Textil WT2332 enFerAK47aNo ratings yet
- Final Upcat Mock ExamDocument24 pagesFinal Upcat Mock Examjbgonzales8No ratings yet
- Data Structure Algorithm Using C PresentationDocument245 pagesData Structure Algorithm Using C PresentationdhruvwNo ratings yet