You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- AC CircuitsDocument30 pagesAC Circuitsshashank11No ratings yet
- Sentrol 2200 Series ManualDocument2 pagesSentrol 2200 Series ManualVictor BitarNo ratings yet
- PhysicsDocument12 pagesPhysicsMilan OliNo ratings yet
- HydroelectricityDocument33 pagesHydroelectricityVarunSinghNo ratings yet
- Influence of Automatic Control of A Tap ChangingDocument8 pagesInfluence of Automatic Control of A Tap ChangingRaphael NgenyiNo ratings yet
- DECS-250E Synchronous Motor ApplicationsDocument4 pagesDECS-250E Synchronous Motor Applicationsrodruren01No ratings yet
- 7 STC TRS Con 02 I Relays & SwitchesDocument47 pages7 STC TRS Con 02 I Relays & Switchesmikkumar5No ratings yet
- Is 3043 - 2018Document108 pagesIs 3043 - 2018Naimish Rathod100% (2)
- Instructional Module: Republic of The Philippines Nueva Vizcaya State University Bayombong, Nueva VizcayaDocument13 pagesInstructional Module: Republic of The Philippines Nueva Vizcaya State University Bayombong, Nueva VizcayaYato QtNo ratings yet
- Supply Record For HV Underground Cable: (For Seam Type/Continuously Welded Corrugated Aluminium Sheath)Document8 pagesSupply Record For HV Underground Cable: (For Seam Type/Continuously Welded Corrugated Aluminium Sheath)GalihNo ratings yet
- V 27.1 1 SeriesDocument281 pagesV 27.1 1 SeriesKrontab electricNo ratings yet
- An Accurate Method To Determine Electric Motor Efficiency While The Motor Is in OperationDocument28 pagesAn Accurate Method To Determine Electric Motor Efficiency While The Motor Is in OperationShri KulkarniNo ratings yet
- REMF-161 Design and Fabrication of Power Generation by Sliding Mechanism in Vehicle Kinetic Energy Motion in High WayDocument5 pagesREMF-161 Design and Fabrication of Power Generation by Sliding Mechanism in Vehicle Kinetic Energy Motion in High WayVinayaga ProjectinstituteNo ratings yet
- Modulo UV - BLP 59-S - E ManualDocument21 pagesModulo UV - BLP 59-S - E ManualJuan CaceresNo ratings yet
- CPC 100 Brochure ENUDocument44 pagesCPC 100 Brochure ENUhuanNo ratings yet
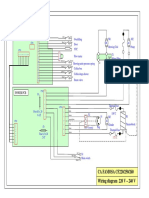
- Logic PCB: CA FAMOSA CF220/250/260 Wiring Diagram 220 V - 240 VDocument1 pageLogic PCB: CA FAMOSA CF220/250/260 Wiring Diagram 220 V - 240 VAli AhmiaNo ratings yet
- Energies 12 01569Document43 pagesEnergies 12 01569Vikram JainNo ratings yet
- V112-3 MWDocument16 pagesV112-3 MWnikos_tsNo ratings yet
- A New Power-Factor-Correction Circuit For Electronic Ballasts With Series-Load Resonant InverterDocument6 pagesA New Power-Factor-Correction Circuit For Electronic Ballasts With Series-Load Resonant InverterLalith KrishnanNo ratings yet
- CFV CFVB: Voltage RelaysDocument2 pagesCFV CFVB: Voltage Relaysss subramanyamNo ratings yet
- 4 Phoenix Charger and InverterDocument1 page4 Phoenix Charger and InverternevkatNo ratings yet
- Batteyr Sizing For Emergency LightingDocument12 pagesBatteyr Sizing For Emergency Lightingalexwongks6118No ratings yet
- Complete Plant Electrics BOQDocument101 pagesComplete Plant Electrics BOQVijai PrasathNo ratings yet
- A Report On Transformer (Part-1)Document7 pagesA Report On Transformer (Part-1)Murshedur RahmanNo ratings yet
- ZS1 - Technical Specification 04.2019Document20 pagesZS1 - Technical Specification 04.2019Luis Fernando Muñoz MolinaNo ratings yet
- DC-DC Part TwoDocument22 pagesDC-DC Part TwoAbenezer ZenebeNo ratings yet
- Vector Group of Transformer: Electrical Notes & ArticlesDocument24 pagesVector Group of Transformer: Electrical Notes & ArticlesRuchir PandeyNo ratings yet
- Mihret Desta 33Document87 pagesMihret Desta 33Esayas YeshambelNo ratings yet
- Hopewind 10kw On Grid Solar InverterDocument2 pagesHopewind 10kw On Grid Solar InverterSalman Ali QureshiNo ratings yet
- Converting Existing Synchronous Generators Into Synchronous CondensersDocument2 pagesConverting Existing Synchronous Generators Into Synchronous CondensersPradeep RajasekeranNo ratings yet