You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Ravi Payment BillDocument1 pageRavi Payment BillSUNDARNo ratings yet
- BLR C 01510 19Document1 pageBLR C 01510 19SUNDARNo ratings yet
- SECTION 01.77.00 Project Close Out Procedures: DHCD 1/21/2010 Project Closeout 01.77.00 1 of 4Document4 pagesSECTION 01.77.00 Project Close Out Procedures: DHCD 1/21/2010 Project Closeout 01.77.00 1 of 4SUNDARNo ratings yet
- Arunraj G: Mobile: 9600402899Document2 pagesArunraj G: Mobile: 9600402899SUNDARNo ratings yet
- CV SugirthaDocument14 pagesCV SugirthaSUNDARNo ratings yet
- Al Dur Phase II SWRO Plant: Gravel DiscussionDocument3 pagesAl Dur Phase II SWRO Plant: Gravel DiscussionSUNDARNo ratings yet
- Punch No. Scope of Contractor Permit Description of Punch StatusDocument2 pagesPunch No. Scope of Contractor Permit Description of Punch StatusSUNDARNo ratings yet
- Present Tense Past Tense Past Participle Regular VerbsDocument3 pagesPresent Tense Past Tense Past Participle Regular VerbsSUNDAR50% (2)
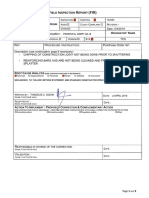
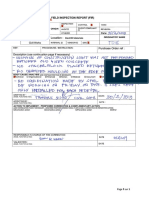
- FIR No. 008 - Material Mishandling & Water Proofing DefectDocument3 pagesFIR No. 008 - Material Mishandling & Water Proofing DefectSUNDARNo ratings yet
- FIR No. 008 - Material Mishandling & Water Proofing DefectDocument3 pagesFIR No. 008 - Material Mishandling & Water Proofing DefectSUNDARNo ratings yet
- FIR No. 012 - Honey Combs and Cold JointsDocument1 pageFIR No. 012 - Honey Combs and Cold JointsSUNDARNo ratings yet
- FIR No. 007 - Honey Combs & Cracks On SurfacesDocument3 pagesFIR No. 007 - Honey Combs & Cracks On SurfacesSUNDARNo ratings yet
- FIR No. 012 - Honey Combs and Cold JointsDocument3 pagesFIR No. 012 - Honey Combs and Cold JointsSUNDARNo ratings yet
- FIR No. 005 - Cracks On PedestalsDocument3 pagesFIR No. 005 - Cracks On PedestalsSUNDARNo ratings yet
- DATE: 22/11/2018: SUBJECT: Concrete Card For Structural ElementsDocument1 pageDATE: 22/11/2018: SUBJECT: Concrete Card For Structural ElementsSUNDARNo ratings yet
- FIR No. 006 - Pedestal ShutteringDocument4 pagesFIR No. 006 - Pedestal ShutteringSUNDARNo ratings yet
- Sample Date - 12 FebDocument3 pagesSample Date - 12 FebSUNDARNo ratings yet
- Sample Date - 09 FebDocument3 pagesSample Date - 09 FebSUNDARNo ratings yet
- Parapet ConcreteDocument1 pageParapet ConcreteSUNDARNo ratings yet
- Sample Date - 09 FebDocument6 pagesSample Date - 09 FebSUNDARNo ratings yet
- Cube LogDocument23 pagesCube LogSUNDARNo ratings yet
- Sharjah Civil Engineering NotesDocument30 pagesSharjah Civil Engineering NotesSUNDARNo ratings yet
- BLR C 0969 19 1Document1 pageBLR C 0969 19 1SUNDARNo ratings yet
- Arabic Grammer For The Holy QuranDocument45 pagesArabic Grammer For The Holy QuranAL-BAZ100% (2)
- EmihtmlDocument12 pagesEmihtmlSUNDARNo ratings yet
- Insurance - TN 59 AA 7139Document2 pagesInsurance - TN 59 AA 7139SUNDARNo ratings yet
- SP 7 (2005) - National Building Code of India 2005 (Group 1 To 5)Document1,157 pagesSP 7 (2005) - National Building Code of India 2005 (Group 1 To 5)VIKRAM singhNo ratings yet
- Load CalculationDocument6 pagesLoad CalculationSUNDARNo ratings yet
- Detailed Estimate FOR BUILDINGDocument17 pagesDetailed Estimate FOR BUILDINGSUNDARNo ratings yet
- Periyar Nagar - JCB AccountsDocument6 pagesPeriyar Nagar - JCB AccountsSUNDARNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Laminar Premixed Flames 6Document78 pagesLaminar Premixed Flames 6rcarpiooNo ratings yet
- Electron LayoutDocument14 pagesElectron LayoutSaswat MohantyNo ratings yet
- Solutions - HW 3, 4Document5 pagesSolutions - HW 3, 4batuhany90No ratings yet
- Addpac AP1000 DSDocument2 pagesAddpac AP1000 DSEnrique RamosNo ratings yet
- Myth or Fact-Worksheet 1Document1 pageMyth or Fact-Worksheet 1Zahraa LotfyNo ratings yet
- RA-035659 - CIVIL ENGINEER - Cebu - 5-2022Document157 pagesRA-035659 - CIVIL ENGINEER - Cebu - 5-2022Ash AlbainNo ratings yet
- ENGL102 Othello Act 3 Discussion QuestionsDocument2 pagesENGL102 Othello Act 3 Discussion QuestionsDaniel DenningNo ratings yet
- Guide For Sustainable Design of NEOM CityDocument76 pagesGuide For Sustainable Design of NEOM Cityxiaowei tuNo ratings yet
- Module 8 - Emotional Intelligence Personal DevelopmentDocument19 pagesModule 8 - Emotional Intelligence Personal DevelopmentRoxan Binarao-Bayot60% (5)
- Porsche Dealer Application DataDocument3 pagesPorsche Dealer Application DataEdwin UcheNo ratings yet
- Origins - and Dynamics of Culture, Society and Political IdentitiesDocument4 pagesOrigins - and Dynamics of Culture, Society and Political IdentitiesJep Jep Panghulan100% (1)
- Math 10 Week 3-4Document2 pagesMath 10 Week 3-4Rustom Torio QuilloyNo ratings yet
- Principles of Volumetric AnalysisDocument5 pagesPrinciples of Volumetric AnalysisMax TennerNo ratings yet
- Symmetrir and Order. Reasons To Live According The LodgeDocument6 pagesSymmetrir and Order. Reasons To Live According The LodgeAnonymous zfNrN9NdNo ratings yet
- Montessori Vs WaldorfDocument4 pagesMontessori Vs WaldorfAbarnaNo ratings yet
- Rizal Noli Me TangereDocument35 pagesRizal Noli Me TangereKristine Cantilero100% (2)
- Heart Attack Detection ReportDocument67 pagesHeart Attack Detection ReportAkhil TejaNo ratings yet
- Reaction Paper GattacaDocument1 pageReaction Paper GattacaJoasan PutongNo ratings yet
- AlligentDocument44 pagesAlligentariNo ratings yet
- Case StarbucksDocument3 pagesCase StarbucksAbilu Bin AkbarNo ratings yet
- Centric WhitepaperDocument25 pagesCentric WhitepaperFadhil ArsadNo ratings yet
- Annual Report 2022 2Document48 pagesAnnual Report 2022 2Dejan ReljinNo ratings yet
- Hamza Akbar: 0308-8616996 House No#531A-5 O/S Dehli Gate MultanDocument3 pagesHamza Akbar: 0308-8616996 House No#531A-5 O/S Dehli Gate MultanTalalNo ratings yet
- Speaking Quý 1 2024Document43 pagesSpeaking Quý 1 2024Khang HoàngNo ratings yet
- Section ADocument7 pagesSection AZeeshan HaiderNo ratings yet
- TDS-11SH Top Drive D392004689-MKT-001 Rev. 01Document2 pagesTDS-11SH Top Drive D392004689-MKT-001 Rev. 01Israel Medina100% (2)
- Def - Pemf Chronic Low Back PainDocument17 pagesDef - Pemf Chronic Low Back PainFisaudeNo ratings yet
- Ethernet: Outline Multiple Access and Ethernet Intro Ethernet Framing CSMA/CD Protocol Exponential BackoffDocument25 pagesEthernet: Outline Multiple Access and Ethernet Intro Ethernet Framing CSMA/CD Protocol Exponential BackoffcheckNo ratings yet
- Blank Freeway Walls Replaced With Local Designs - Press EnterpriseDocument5 pagesBlank Freeway Walls Replaced With Local Designs - Press EnterpriseEmmanuel Cuauhtémoc Ramos BarajasNo ratings yet
- Alliance For ProgressDocument19 pagesAlliance For ProgressDorian EusseNo ratings yet