You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Astm D1250 Table 56Document7 pagesAstm D1250 Table 56Frankie Nguyen100% (4)
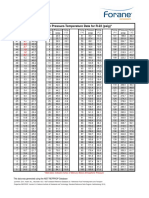
- Forane 22 Saturation Pressure Temperature DataDocument1 pageForane 22 Saturation Pressure Temperature Datavineeth100% (1)
- Margarine 12Document74 pagesMargarine 12the_gunners2004No ratings yet
- Upsc Advt 03 2013Document8 pagesUpsc Advt 03 2013Adithya ReddyNo ratings yet
- The Basics of Microsoft Excel: Theresa A Scott, MS Biostatistician III Department of Biostatistics Vanderbilt UniversityDocument18 pagesThe Basics of Microsoft Excel: Theresa A Scott, MS Biostatistician III Department of Biostatistics Vanderbilt UniversityJiya ChaudharyNo ratings yet
- MS ExcelDocument12 pagesMS ExcelAdithya ReddyNo ratings yet
- Jntuworld: Jawaharlal Nehru Technological University HyderabadDocument7 pagesJntuworld: Jawaharlal Nehru Technological University Hyderabadchakradhar_jall2695No ratings yet
- CHEMIST LICENSURE EXAM TABLEDocument8 pagesCHEMIST LICENSURE EXAM TABLEJasmin NewNo ratings yet
- Solution Recording and Playback Vortex SheddingDocument27 pagesSolution Recording and Playback Vortex SheddingerenNo ratings yet
- Laboratory Manual For Ac Electrical CircuitsDocument90 pagesLaboratory Manual For Ac Electrical CircuitsLharie Mae BecinaNo ratings yet
- ENCH4PP: Petroleum & Synthetic Fuel ProcessingDocument16 pagesENCH4PP: Petroleum & Synthetic Fuel ProcessingAshrafNo ratings yet
- Paul FrictionDocument5 pagesPaul FrictionPaul Aldrin OlvezNo ratings yet
- Bulk DensityDocument4 pagesBulk DensitydeniNo ratings yet
- JNTU World Geotech Engineering ExamDocument4 pagesJNTU World Geotech Engineering ExamDp VisheshNo ratings yet
- Inelastic Seismic Performance of RC Tall Piers With Hollow SectionDocument8 pagesInelastic Seismic Performance of RC Tall Piers With Hollow SectionMadhurimaMitraNo ratings yet
- Science Lesson Plan: Rubrics On Assessing The Performance of Group ActivityDocument1 pageScience Lesson Plan: Rubrics On Assessing The Performance of Group ActivityRowena Sta MariaNo ratings yet
- DividersDocument7 pagesDividersVenkatesh KarriNo ratings yet
- Dimensional Analysis Worksheet 2Document4 pagesDimensional Analysis Worksheet 2German ToledoNo ratings yet
- Transformers:: " Transformers Are The Heart of The Alternating Current System." - William Stanley Jr.Document13 pagesTransformers:: " Transformers Are The Heart of The Alternating Current System." - William Stanley Jr.SRIRAM SATHISHNo ratings yet
- Phreatic Line PDFDocument21 pagesPhreatic Line PDFshubhamNo ratings yet
- Higher efficiency synchronous motors for industrial applicationsDocument6 pagesHigher efficiency synchronous motors for industrial applicationsAmirNo ratings yet
- Electrical Circuits & Networks Question BankDocument6 pagesElectrical Circuits & Networks Question BankMATHANKUMAR.S100% (1)
- Blocked Rotor TestDocument11 pagesBlocked Rotor TestIjabi100% (1)
- 2015 BFnature15750 MOESM58 ESMDocument9 pages2015 BFnature15750 MOESM58 ESMmacheng yangNo ratings yet
- Calculable Cross CapacitorDocument43 pagesCalculable Cross Capacitornova1234No ratings yet
- Experiment No. 2: Slider Crank MechanismDocument6 pagesExperiment No. 2: Slider Crank MechanismLovekeshNo ratings yet
- Energy and Linear and Angular Momenta in Simple Electromagnetic SystemsDocument24 pagesEnergy and Linear and Angular Momenta in Simple Electromagnetic SystemsJennifer RibeiroNo ratings yet
- Forces and Gravity QuestionsDocument4 pagesForces and Gravity QuestionsJan DefrNo ratings yet
- Helium Pycnometry Density TestDocument2 pagesHelium Pycnometry Density TestDapoer OmaOpa100% (1)
- 2012 - Mak - NatMater - Tightly Bound Trions in Monolayer MoS2Document5 pages2012 - Mak - NatMater - Tightly Bound Trions in Monolayer MoS2Liqin SuNo ratings yet
- Chapter 1 Units and VectorsDocument33 pagesChapter 1 Units and VectorslozzzzzNo ratings yet
- Understanding the Mole ConceptDocument23 pagesUnderstanding the Mole ConceptMuyatwa LiksNo ratings yet
- Review Questions: 3. The Cyclist Has A Mass of 50 KG and Is Accelerating at 0.9 M/sDocument8 pagesReview Questions: 3. The Cyclist Has A Mass of 50 KG and Is Accelerating at 0.9 M/sMohamedNo ratings yet
- Chemical Thermodynamics: Module - 4Document25 pagesChemical Thermodynamics: Module - 4TeachingTrainingCoaching KnowledgeSharingSessionNo ratings yet