Professional Documents
Culture Documents
Masini Unelte Si Prelucrari Prin Aschiere
Uploaded by
totocsCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Masini Unelte Si Prelucrari Prin Aschiere
Uploaded by
totocsCopyright:
Available Formats
Dorin ROCA
MAINI UNELTE I PRELUCRRI
PRIN ACHIERE
2008
REPROGRAFIA UNIVERSITII TRANSILVANIA DIN BRAOV
Maini- unelte si prelucrri prin achier e
- 3 -
PREFA
Este cunoscut faptul c una dintre cerinele de baz ale economiei de pia o constituie
competitivitatea produselor, competitivitate asigurat, de performanele de exploatare a
acestora precum i de costurile legate de obinerea lor i implicit costurile de fabricaie.
Din punct de vedere teoretic, calitatea unui produs reprezint o noiune cu caracter
complex i dinamic care vizeaz ntregul ansamblu al proprietilor produsului.Calitatea unui
produs este menit s asigure acestuia o multitudine de caracteristici tehnice, economice,
ergonomice, estetice etc. Prin urmare, atributele calitii sunt strns legate de caracteristicile
funcionale, de fiabilitate i mentenabilitate, precum i de caracteristicile psiho-senzoriale i
chiar sociale.
Nivelul calitativ al oricrui produs, implicit i cel al autovehiculelor rutiere, va
reprezenta expresia final a calitii concepiei i a ntregului proces de fabricaie,
concretiznd nivelul tehnic, performanele constructive i economice al fiecrui produs.
n consecin, calitatea nu trebuie doar constatat, ci conceput n faza de sintez,
proiectare i apoi materializat n cadrul proceselor tehnologice de fabricaie, specifice
fiecrui domeniu productiv.
De aceea, specialitii trebuie s neleag fiecare element al procesului de producie, s
l stpneasc n profunzime i s fie capabili s lucreze n echipe multidiscplinare, n
conformitate cu principiile ingineriei concurente.
n acest sens a fost conceput i prezentul elaborat / curs didactic, el fiind axat pe
problematica sistemelor tehnologice de prelucrare prin achiere.Lucrarea este format din
urmatoarele 4 capitole:
1.Generarea suprafeelor pe maini-unelte.
2.Lanurile cinematice ale mainilor-unelte.
3.Bazele prelucrrilor prin achiere pe maini-unelte.
4.Procedee de prelucrare prin achiere.
Prefa
- 4 -
n primele dou capitole sunt tratate probleme specifice mainilor-unelte.Astfel, n
primul capitol, dup precizarea elementelor definitorii ale geometriei generrii suprafeelor,
sunt analizate i studiate cele dou tipuri, de baz, de curbe care asigur realizarea oricrei
suprafee, de orice form i orice poziie; este vorba de curba generatoare i respectiv curba
directoare.
Prin intermediul celui de al doilea capitol este studiat componenta / structura
mainilor-unelte.Pentru nceput este definit lanul cinematic generator, care asigur obinerea
formelor i a dimensiunilor traiectoriilor directoare i generatoare, precum i a vitezelor pe
aceste traiectorii. Aa dup cum rezult i din denumirea sa, lanul cinematic principal este
subansamblul cel mai important al oricrei maini-unelte, i ca atare sunt transmise
cunoiinte referitoare la acest subansamblu. n continuare este definit lanul cinematic de
avans i este analizat structura acestuia.
Capitolul al treilea, dezvoltat pe aproximativ 35 de pagini, este axat pe studierea
elementelor de baz ale prelucrrilor pe maini -unelte:
- cinematica procesului de prelucrare, cu referiri concrete la diverse maini -unelte;
- parametrii procesului de achiere i ai sculelor achietoare.
n cel de al patrulea capitol sunt prezentate procedee de prelucare / generare a
suprafeelor prin achiere (strunjirea, frezarea, alezarea etc.) precum i cteva procedee de
prelucare prin abrazare (rectificarea, honuirea, vibronetezirea i altele). Pentru fiecare dintre
aceste procedee sunt tratate urmatoarele probleme:
- regimul de achiere i parametrii de reglaj ai sistemului tehnmologic;
- principiul de lucru;
- tipuri de suprafee ce pot fi obinut e / prelucrate.
Din punct de vedere al didacticii specialitii, fiecare capitol este structurat n trei
pri: obiectivele capitolului(obiectivele operaionale), cunotiinele tehnico-
tiinifice specifice domeniului studiat i n final, ntrebri de verificare a
cunotiinelor, care implicit se constituie i ntr-un rezumat al cunotiinelor de
specialitate dezvoltate / tratate n fiecare capitol.
Autorul
Maini- unelte si prelucrri prin achiere
- 5 -
CUPRINS
Prefa ............... 3
Cuprins .............. 5
Cap.1. Generarea suprefeelor pe maini -unelte ............... 7
1.1 Generarea teoretic a suprafeelor ............ 7
1.1.1. Geometria generrii . ........... 7
1.1.2. Generatoarea ............... 10
1.1.2.1. Generatoarea materializat . .......... 11
1.1.2.2. Generatoarea cinematic ........... 12
1.1.2.2.1. Generatoarea cinematic ca traiectorie a unui punct ........... 12
1.1.2.2.2. Generatoarea cinematic ca nfurtoare a unei curbe
materializate n micare .......................
13
1.1.2.3. Generatoare programat ................................................................. ........... 16
1.1.3. Directoarea ............................................................................................. ............ 17
1.1.3.1. Directoarea materializat .. ............................................................. ........... 17
1.1.3.2. Directoarea cinematic .................................................................. ........... 17
1.1.3.2.1. Directoarea cinematic ca traiectorie a unui punct ... ............ .......... 17
1.1.3.2.2. Directoarea cinematic ca nfurtoare a unei curbe cinematice .. 20
1.1.3.2.3. Directoarea cinematic imprimat prin rulare ...................... ........... 21
1.1.3.3. Directoarea programat ..................... ............................................ ........... 22
1.2. Generarea suprafeelor reale ............................................................................ ........... 23
1.2.1. Suprafa i profil ........................................... ........................................ ........... 23
1.2.2. Generatoarea real .................................................................................. ........... 24
1.2.2.1. Generatoarea real materializat .................................. .................. .......... 24
1.2.2.2. Generatoarea real cinematic ....................................................... ........... 25
1.2.2.2.1. Generatoarea cinematic ca traiectorie a unui punct .......... 25
1.2.2.2.2. Generatoarea cinematic ca nfurtoare a unei curbe
materializate ................................ .........
27
1.2.3. Directoarea real ..................................................................................... ........... 28
1.2.3.1. Directoarea real materializat ...................................................... ........... 28
1.2.3.2. Directoarea real cinematic .......................................................... ........... 28
1.2.3.2.1. Directoarea real cinematic punctiform ...... ...................... .......... . 28
1.2.3.2.2. Directoarea real cinematic ca nfurtoare ................. 28
1.2.3.2.3. Directoarea real cinematic imprimat prin rulare ............. ........... 30
ntrebri de verificare a cunotinelor..... ................................. ............................... ............. 31
Cap.2. Lanurile cinematice ale mainilor -unelte ............................ ................................ ............. 33
2.1. Definirea lanului cinematic generator ... ........................ ................................ .............. 33
2.2. Clasificarea lanurilor cinematice generatoare ............................................................. 36
2.3. Lanuri cinematice principale ............................ ............. ............................... .............. 38
2.3.1. Definire ................................................................ ............................... ................ 38
2.3.2. Mrimea de ieire a lanului cinematic principal ............................. .................. 39
2.3.3. Structura lanului cinematic principal ...................................... .......................... 41
2.4. Lanuri cinematice de avans ............................................. ................ ............... ............. 44
2.4.1. Definire .................................................................. ............................... .............. 44
2.4.2. Mrimea de ieire din lanul cinematic de avans .. .............................. ............... 45
2.4.3. Structura lanului cinematic de avans ................. ............................... ............. .... 46
2.4.4. Lanuri cinematice de avans realizate cu mecanisme de naturi diferite ............. 47
ntrebri de verificare a cunotinelor..................................... ............................... ............. . 51
Cap.3. Bazele prelucrrilor prin achiere pe maini -unelte .......................................................... 53
3.1. Cinematica procesului de prelucrare prin achiere ........ ............................... ............... 53
3.1.1. Structura micrii de generare ............................ .............................. .................. 54
3.1.1.1. Micarea efectiv .................................. ............ .................... .................... 54
3.1.1.2. Micarea principal .............................. .............................. ....................... 56
3.1.1.3. Micrile complementare sau de avans .................................... ................ 60
Cuprins
- 6 -
3.1.2. Analiza micrii de generare ..................... .............................. ........................... 66
3.2. Parametrii procesului de achiere i ai sculelor achietoare .............. ............. ............. 73
3.2.1. Definirea procesului de achiere i evidenierea factorilor de care acesta
depinde ................................................................................ ............. ...............
74
3.2.2. Rolul mainii-unelte n procesul de achiere .......... .............................. ............. 76
3.2.3. Dependena procesului de achiere de natura materia lului prelucrat ................. 77
3.2.4. Influena lichidelor de rcire-ungere ................................................................. . 78
3.2.5. Elementele caracteristice ale scului achietoare ca organ de execuie............... . 79
3.2.5.1. Definiia i rolul sculei achietoare n procesul de achiere .................... . 79
3.2.5.2. Prle componente ale sculelor achietoare ... ............................... ........... 80
3.2.5.3. Parametrii geometrici ai sculelor ............................................................. . 83
ntrebri de verificare a cunotinelor...................................................................... ........... . 88
Cap.4. Procedee de prelucrare prin achiere ............................................................................. .... 89
4.1. Strunjirea ....................... ................................................. ............................... ............... 89
4.1.1. Definire i principiul de lucru .............................. ............................... .......... ..... 89
4.1.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic ........... ..... 90
4.1.3. Tipuri de suprafee ce pot fi obinute prin strunjire .......... .. 91
4.2. Rabotarea .............................................................................................. ..................... .. 91
4.2.1. Definire i principiul de lucru ................................ ............................... .......... ... 91
4.2.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic ............. ... 92
4.2.3. Tipuri de suprafee ce pot fi obinute prin rabotare ................ 92
4.3. Mortezarea .......................................................................................................... ......... 93
4.3.1. Definire i principiul de lucru .... ....................................................................... . 93
4.3.2. Regimul de achiere i parametrii de re glaj ai sistemului tehnologic ........... ..... 93
4.3.3. Tipuri de suprafee ce pot fi obinute prin mortezare.......... .... 94
4.4. Burghierea .................................................................................... ................................ 94
4.4.1. Definire i principiul de lucru ............................................. ............................... 94
4.4.2. Regimul de achiere i parametrii de r eglaj ai sistemului tehnologic .......... ...... 95
4.5. Lrgirea, adncirea, teirea i lamarea ....................................................... ................. 96
4.5.1. Definire i principiul de lucru ........................... ............................... .......... ........ 96
4.5.2. Regimul de achiere i parametrii de re glaj ai sistemului tehnologic ........... ..... 97
4.6. Alezarea ........................................................ .......................................................... ..... 98
4.6.1. Definire i principiul de lucru ............................. ............................... .......... ...... 98
4.6.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic .......... ...... 98
4.7. Broarea ..................................................................................................................... .. 99
4.7.1. Definire i principiul de lucru .................................................. ........................ .. 99
4.7.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic ............ .... 100
4.7.3. Tipuri de suprafee ce pot fi obinute prin broare............ .. 101
4.8. Frezarea ........................... ........................................................ ..................................... 101
4.8.1. Definire i principiul de lucru ............................ .......... ...................................... 101
4.8.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic .............. .. 102
4.8.3. Tipuri de suprafee ce pot fi obinute prin frezare............... 103
4.9. Rectificarea ................................... ............................ .......................... ......................... 104
4.9.1. Definire i principiul de lucru ........................ .................................................... 104
4.9.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic .............. .. 106
4.9.3. Tipuri de suprafee ce pot fi obinute prin rectificare ............ 107
4.10. Honuirea ..................................................................................................................... 107
4.10.1. Definire i principiul de lucru ............................... ......... .................................. 107
4.10.2. Performanele tehnologice ale honuirii ....................................................... ..... 108
4.11. Vibronetezirea ...................................... ...................................................................... 109
4.12. Lepuirea (rodarea) ...................................................................................................... 109
4.13. lefuirea i lustruirea ................. ................................................................................ 110
ntrebri de verificare a cunotinelor...................................................................... ............ 111
Bibliografie .......... .................... ..................................................................................................... 112
Maini- unelte si prelucrri prin achiere
- 7 -
Capitolul I
Obiectivele capitolului:
Precizarea cadrului general privind elementele definitorii ale geometriei generrii
suprafeelor.
Definirea curbei generatoare i prezentarea modalitilor teoretice de trasare a
acesteia.
Definirea curbei directoare i a tipurilor ei de baz sub aspectul aplicabilitii tehnice.
Studiul generrii suprafeelor reale pe maini - unelte.
nsuirea, din punct de vedere tehnic, a noiunilor suprafa i profil.
Definirea generatoarei reale i a principalelor ei variante utilizate n cadrul
prelucrrilor pe maini-unelte.
Definirea i nsuirea cunotinelor referitoare la curba directoare real.
Particularizarea metodologiei generrii suprafeelor pe tipuri de maini -unelte.
GENERAREA SUPRAFEELOR PE MAINI-UNELTE
1.1 Generarea teoretic a suprafeelor
1.1.1. Geometria generrii
Din punct de vedere matematic, suprafaa este considerat ca o pnz fr grosime,
separnd dou medii distincte, fr a aparine nici unuia dintre acestea.
Orice suprafa poate s rezulte prin unul din urmtoarele moduri:
- deplasarea n spaiu a unui punct n anumite condiii;
- intersecia a dou corpuri;
- nfurarea poziiilor succesive ale unui corp care se deplaseaz n spaiu;
- deplasarea unei curbe n spaiu.
Pentru studiul generrii suprafeelor pe maini-unelte se preteaz cel mai bine ultimul
mod de a considera aceast generare.
Definiia unui astfel de mod de generare este urmtoarea:
Generarea suprafeelor pe maini- unelte
- 8 -
O suprafa poate fi generat de o curb oarecare, prin deplasarea sa n spaiu, curba
schimbndu-i, sau nu, forma n timpul deplasrii.
Suprafaa generat va fi deci locul geometric al poziiilor succesive ale curbei n timpul
micrii.
Curba care genereaz suprafaa este denumit generatoare.
In timpul deplasrii curbei generatoare, un punct M, oarecare al acesteia descrie o
traiectorie denumit directoare.
Generatoarea i directoarea pot fi curbe plane sau curbe strmbe spaiale. In
tehnic se prefer primul caz datorit simplitii realizrii suprafeelor cu ajutorul
curbelor plane.
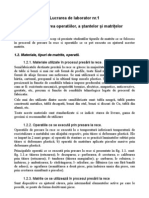
Pentru ilustrarea generrii unei suprafee cu ajutorul curbelor plane se consider
(fig.l.l) un plan V al generatoarei G care este totdeuna normal pe planul al directoarei D.
Urma "gg"a planului generatoarei pe planul directoarei face unghiul cu tangenta TD
la directoare, n punctul de sprijin M al generatoarei pe aceasta.
Generarea suprafeei rezult n acest caz prin deplasarea planului pe planul n aa
fel nct tot timpul acestea s fie ortogonale, iar punctul M al generatoarei G s se mite pe
directoarea D.
Unghiul dintre tangenta la directoare i
urma "gg" poate fi constant sau variabil n timpul
deplasrii planului .
In primul caz, = ct, unghiul poate avea
orice mrime,ns de obi cei est e de 90, deci
urma planului generatoarei coincide cu normala
la curba directoare n punctul M.
Dac unghiul 0 variaz n timpul deplasrii
planului generatoarei, atunci forma suprafeei
generate este n funcie de legea de variaie a
acestuia i a vitezei de deplasare, cu excepia
cazului n care cele dou legi de variaie au un
parametru comun. In generarea suprafeelor pe
maini-unelte se ntlnesc 2 astfel de cazuri:
a) deplasarea planului generatoarei paralel cu el nsui;
b) rotirea planului generatoarei n jurul unei drept e normale pe planul directoarei
(vezi generarea spiralei arhimedice).
Fig. 1.1
Maini- unelte si prelucrri prin achiere
- 9 -
Unele suprafee ale pieselor pe care trebuie s le executm nu pot fi generate prin
deplasarea de-a lungul unor curbe plane. Astfel este cazul suprafeelor elicoidale a danturilor
unor roi dinate conice, a unor suprafee detalonate etc, la care directoarea e o curb spaial.
In toate aceste cazuri, pentru a putea preciza poziia curbei generatoare n raport cu
directoarea, este necesar s se fac apel la un triedru ortogonal format din 3 semiplane
caracteristice (fig. 1.2):
- semiplanul osculator sPo
;
- semiplanul tangent sPi
;
- semiplanul normal sP
N.
Intersecia s a planului osculator cu sP
T
determin tangenta T
D
la curba directoare.
Semiplanul normal are dreapt comun cu sPo , dreapta MN care reprezint normala la
curba directoare, iar cu semiplanul tangent sP
T
, dreapta MB.
Fig. 1.2
Dac n semiplanul normal se afl o curb generatoare G care trece prin vrful
triedrului, M, atunci prin deplasarea acestui triedru se va genera o suprafa avnd ca
directoare curba spaial D, iar ca generatoare curba plan G. In acest caz semiplanul sP
T
are
rolul planului al directoarei din fig. 1.1, iar semiplanul SPN cel al planului al generatoarei G.
Datorit faptului c tangenta T
D
este totdeauna normal pe planul , rezult c unghiul
dintre aceasta i intersecia MB, respectiv "gg" din fig. 1.1, a planelor i este totdeauna
egal cu 90, deci = 90 = ct.
Generarea suprafeelor pe maini- unelte
- 10 -
1.1.2 Generatoarea
Curbele generatoare ale suprafeelor pieselor pot avea cele mai variate forme.
Fig. 1.3
Din punct de vedere al complexitii generatoarelor ,acestea pot fi grupate n:
- curbe simple plane, exprimabile analitic: dreapta din fig. 1.3a, cercul
din fig. 1,3b, evolventa din fig. 1.3c.
- curbe compuse, n a cror form intervin un numr oarecare de drepte
i curbe plane analitice .
Exemple: profilul unui filet, fig. 1.3d, profilul unei caneluri, fig. 1.3e, profilul unui
mner, fig. 1.3f etc.
- curbe neanalitice, exprimate numai prin coordonate;ex.: profilul palelor de
elice, fig. 1.3g, profilul unor melci, a unor matrie etc.
Din punct de vedere al realizrii, curbele generatoare se mpart n dou categorii:
- curbe generatoare materializate;
Maini- unelte si prelucrri prin achiere
- 11 -
- curbe generatoare obinute pe cale cinematic.
1.1.2.1. Generatoarea materializat
In procesul de generare a suprafeelor pe maini-unelte, curba generatoare poate fi
materializata prin forma muchiei achietoare a sculei, dac unghiul de degajare este nul,
sau prin proiecia ei pe planul feei de degaj are, cnd unghi ul est e diferit de zero.
Fig. 1.4
In figura 1.4 se exemplific un proces de generare a unei suprafee prin rabotare,
utiliznd un cuit cu unghiul de degajare diferit de zero.
Materializarea generatoarei prin muchia achietoare a sculei este posibil numai n
cazurile n care lungimea acesteia nu este prea mare, deoarece cu creterea lungimii tiului
apar probleme dificile de rezolvat din punct de vedere al construciei i ntreinerii sculei,
ca urmare a creterii forelor de achiere i a coplexitii formei generatoarei.
1.1.2.2 Generatoarea cinematic
Generatoarea fiind o curb, poate fi considerat, din punct de vedere matematic, ca
rezultnd n mai multe moduri i anume ca:
- urma unui punct K n deplasarea sa n plan;
- nfurarea poziiilor succesive ale unei curbe C care se deplaseaza ntr-un plan;
- intersecia a dou suprafee
1
i
2
.
Generarea suprafeelor pe maini- unelte
- 12 -
Primele dou cazuri de generare implic o micare ce poate fi realizat prin
intermediul unor elemente cinematice ale mainii-unelte cum sunt mecanismul fus-lagr i
mecanismul ghidaj-sanie.
1.1.2.2.1 Generatoarea cinematic ca traiectorie a unui punct
Cea mai simpl dintre
generatoarele cinematice, realizate ca
traiectorie a unui punct, este
generatoarea rectilinie n cazul
strunjirii unei suprafee cilindrice,
fig. 1.5.
Teoretic, se consider
vrful K al cuitului ca fiind
punctiform i dotat cu o micare de
translaie de vitezV
k
pe o direcie
paralel cu axa piesei.
Se remarc faptul c generatoarea
rectilinie nu mai este programat
pe tiul sculei, ci pe elementele ghidaj-sanie aparinnd mainii-unelte.
Ca urmare, n realizarea cinematic a generatoarei, ca traiectorie a unui punct,
aceasta este programat, ca form, pe elemente ale mainii-unelte, de pe care se
transpune pe pies, pe cale cinematic.
Pentru a realiza un studiu mai complet al modului de generare cinematic a curbei
generatoare, ca traiectorie a unui punct, vom adopta un sistem de coordonate ortogonale sau
polare.
Astfel, ntr-un sistem de coordonate ortogonale, fig.1.6. a, generarea cinematic a
curbei G de ctre punctul K, materializat de exemplu, prin vrful unui cuit care se deplaseaz
cu viteza V
k
, poate fi obinut prin compunerea micrilor de pe direciile x i y, ale cror
viteze au valori egale cu proieciile vitezei V
k
pe aceste direcii.
Intre cele dou mrimi cinematice V
x
i V
y
, exist n orice moment relaia:
o tg
V
V
x
y
= , (1.1)
n care mrimea unghiului depinde numai de forma geometric a curbei G, relaia fiind
independent de mrimea vitezei V
k
.
Fig. 1.5
Maini- unelte si prelucrri prin achiere
- 13 -
Din punct de vedere cinematic, pentru construcia de maini-unelte aceast remarc este
foarte important, deoarece datorit ei, mrimea vitezei V
k
sau a uneia din componentele ei (V
x
;
V
y
) poate f impus ca mrime a vitezei de avans.
Fig. 1.6
n coordonate polare, fig. 1.6b, generatoarea cinematic G poate fi realizat prin
combinarea micrii de rotaie de vitez unghiular
K
cu micarea de translaie radial de
mrimea V
R
condiionat de relaia:
o p
e
tg
V
K
K
R
= , (1.2)
respectiv: o tg
V
V
N
R
= unde
K K N
V e p = (1.3)
Ca i n cazul coordonatelor ortogonale, punctul K se poate deplasa pe traiectorie cu o
vitez oarecare, necondiionat de forma acesteia i, ca urmare, pe aceleai considerente, V
k
sau una din componentele sale poate avea ca mrime, mrimea vitezei de avans.
1.1.2.2.2. Generatoarea cinematic ca nfurtoarea unei curbe
materializate n micare
Ca exemplu tipic, poate fi considerat generarea danturii evolventice prin mortezare cu
cuit roat, fig.1.7, caz n care curba C, care prin deplasare genereaz profilul dintelui, este
muchia achietoare a unui dinte al sculei.
Generarea suprafeelor pe maini- unelte
- 14 -
Fig. 1.7
Rezult c n cazul generatoarei cinematice ca nfaurtoare a unei curbe materializate,
intervine forma curbei programat pe muchia achietoare a sculei, precum i forma
traiectoriei micrii, programat pe elemente ale mainii-unelte, de tip fus-lagr sau ghidaj-
sanie.
Fig. 1.8
In cazul general, nfaurtoarea, fig. 1.8, este curba G tangent la o alt
curb C n punctele K
1
, K
2
, .................... K
n
, care prin deplasare capt poziiile C
1......
C
n
.
Pentru aceeai curb C, nfurtoarea sa "G" poate avea o infinitate de forme, depinznd de
legea de micare a curbei C. Aceast lege poate fi impus, dac un punct oarecare "Q" al
curbei C este obligat s se deplaseze pe o traiectorie "b" cu o vitez tangenial "V
Q
" i o
vitez unghiular
Q
.
Maini- unelte si prelucrri prin achiere
- 15 -
n cazul generrii suprafeelor pe
maini-unelte se pune ns problema invers i
anume: determinarea curbei "C" pentru o
nfurtoare "G" dat i pentru o anumit
form, n genere rectilinie sau circular a
traiectoriei "b". Tot un element iniial cunoscut
va trebui s fie legea de micare, adic relaia
dintre vitezele V
q
i o
q
.
Pentru exemplificare se consider
dat generatoarea G, fig. 1.9. Pe traiectoria
rectilinie "b" urmeaz s se deplaseze
centrul O
R
al unui cerc de raz R
R
denumit
rulant, care va fi solidar cu curba C nc necunoscut.
Rulanta se deplaseaz cu viteza V
R
i se rotete cu viteza unghiular
R
, ambele mrimi fiind
cunoscute iniial. Raportul dintre valorile acestor viteze determin mrimea razei R
R
a
rulantei:
R
R
R
R
V
=
e
(1.4)
astfel nct s se realizeze o rulare fr alunecare pe o dreapt B denumit baz. Curba "C"
mereu tangent la generatoarea cinematic"G", se va determina, prin una din metodele
cunoscute, ca i conjugat a acesteia, rezolvarea acestei probleme intrnd n atribuiile
proiectantului de scule.
De menionat este i faptul c ntruct mrimea i sensul vitezei V
R
nu influeneaz
forma generatoarei obinute, att timp ct este respectat relaia (1.4), este posibil utilizarea
acestei viteze ca vitez de avans.
Sintetiznd materialul prezentat n legtur cu generatoarea cinematic, ca
nfurtoare a unei curbe materializate, n micare, se pot desprinde urmtoarele concluzii:
- pentru realizarea acestei generatoare este necesar s se determine i s se
materializeze conjugata ei prin muchia sculei achietoare;
- din punct de vedere al efortului de achiere, sculele cu profil conjugat sunt mai
avantajoase dect cele cu generatoare materializat, deoarece muchia achietoare a acestora
ia contact cu semifabricatul din aproape n aproape, pe lungimi relativ mici;
- obinerea generatoarei ca nfurtoare a unei curbe materializate n micare,
complic cinematica i construcia mainii-unelte i impune efectuarea unor reglaje
suplimentare laborioase.
Fig. 1.9
Generarea suprafeelor pe maini- unelte
- 16 -
Cu toate acestea metoda este mult utilizat la operaiile de danturare, ea asigurnd o
precizie ridicat a prelucrrii. Metoda este cunoscut sub denumirea de metoda
generrii prin rulare a danturii, deoarece rularea reprezint nsi procedeul cinematic de
realizare a curbei generatoare.
1.1.2.3. Generatoare programat
Cele dou metode cinematice de realizare a generatoarei, folosind programarea formei
pe elemente ale mainii-unelte sau combinnd acestea cu programarea unei curbe conjugate pe
muchia achietoare a sculei nu permit totdeauna obinerea unor generatoare avnd forme
complicate. Din aceast cauz, n realizarea acestora se folosete un element suplimentar
mainii-unelte, denumit ablon, model i n general port-program pe care se face
programarea formei generatoarei.
Fig. 1.10
La intrarea n funciune a mainii-unelte, programul de pe port-program este citit de un
sesizor adecvat care transform semnalele citite n impulsuri de comand ale lanului
cinematic de copiere. Pentru exemplificare se poate observa n figura alturat cazul copierii
hidraulice a formei unei generatoare, programat prin intermediul unui ablon.
Maini- unelte si prelucrri prin achiere
- 17 -
1.1.3. Directoarea
Prin definiie, directoarea este traiectoria unui punct al generatoarei, ales arbitrar sau
impus de anumite cerine.
Directoarea este prin esen de tip cinematic, dar exist i excepii, putnd fi
programat (materializat) pe scul sau pe diverse tipuri de port-programe ca i n cazul
generatoarei.
Din punct de vedere al complexitii, directoarele se mpart n:
- directoare analitice, determinate printr-o curb matematic plan sau spaial: dreapt,
cerc, spiral arhimedic, elips, ptrat, elice( cilindric sau conic), etc;
- directoare compuse din diferite curbe i drepte;
- directoare neanalitice, realizabile prin transpunere (imprimare) sau prin programare.
1.1.3.1. Directoarea materializat.
Construcia unor scule pentru maini-unelte permite, ca pe lng materializarea
generatoarei prin muchia achietoare a ei, s fie materializat i directoarea. Cele mai utilizate
forme de curbe directoare materializate se ntlnesc n cazurile urmtoare:
a) la burghie, adncitoare i alezoare, toate acestea avnd directoare de form
circular;
b) la broe pentru prelucrri interioare, prevzute cu directoare de form rectilinie;
c) la tarozii i filiere la acestea directoarea fiind o elice cilindric i mai rar conic.
1.1.3.2. Directoarea cinematic
Curbele directoare se obin n majoritatea lor pe cale cinematic, folosind mecanismele
fus-lagr i ghidaj-sanie. Directoarea cinematic poate fi generat ca:
- traiectorie a unui punct;
- nfurtoare a unei curbe cinematice;
- imprimat prin rulare;
- programat.
1.1.3.2.1. Directoarea cinematic ca traiectorie a unui punct
Aceste directoare se prezint sub dou forme de baz i anume:
a) circulare
Generarea suprafeelor pe maini- unelte
- 18 -
b) rectilinii
Astfel, traiectoria directoare circular D, fig. 1.11, se poate considera ca rezultnd prin
deplasarea punctului M, (al generatoarei G, materializate) cu viteza unghiular
M,
la
distana R
D
fa de axa de rotaie.
.
Fig. 1.11 Fig. 1.12
Similar, orice traiectorie directoare rectilinie (a se vedea rabotarea) se poate considera
ca rezultnd prin deplasarea unui punct M al generatoarei respective, dup o direcie rectilinie,
cu viteza V
M
.
Acest mod de a vedea generarea directoarei se datorete faptului c att mecanismul
fus-lagr ct i mecanismul sanie-ghidaj asigur obinerea traiectoriilor directoare respective
numai ca form. Mrimea i poziia n spaiu a curbei directoare depind de poziia
(coordonatele) punctului M al generatoarei n raport cu axa de rotaie, n cazul directoarei
circulare, respectiv n raport cu ghidajul n cadrul directoarei rectilinii.Se remarc i faptul
c ntruct variaia vitezei de deplasare a punctului M, ca mrime i sens, nu modific
forma curbei directoare, valoarea acesteia poate fi aleas n concordan cu necesitile
tehnice ale procesului de achiere, i cu condiiile concrete de prelucrare.
Multe curbe directoare, plane sau spaiale, se obin cinematic prin combinarea
traiectoriilor circulare i rectilinii; de exemplu: spirala arhimedic, elicea cilindric i
conic etc.
Astfel, curba directoare de form spiral arhimedic, fig. 1.12, poate fi realizat prin
combinarea, n plan, a unei micri de translaie radial de vitez V
p
, cu o micare circular de
vitez unghiular
. Caracteristica spiralei arhimedice este pasul "a", calculabil prin relaia:
Maini- unelte si prelucrri prin achiere
- 19 -
p
p
e
V
a =
(1.5)
Analiznd aceast relaie se constat c generarea cinematic a spiralei arhimedice nu
impune condiii de mrime a vitezei V
i nici a vitezei unghiulare
, ci numai a raportului
dintre ele.
Traiectoria elicoidal cilindric se obine cinematic prin combinarea unei micri
circulare de vitez tangenial V
T,
cu o micare de translaie dup o direcie normal pe
planul micrii circulare, de vitez V
A
. Cele dou viteze, fig. 1. 13, sunt condiionate, una n
raport de cealalt, prin intermediul unghiului "" de nclinare al elicei:
T
A
V
V
tg = (1.6)
fr a exista, teoretic, nici un fel de restricii din punct de vedere al mrimii vitezelor V
A
i V
T
.
Aceast proprietate permite s se considere ca vitez de achiere, viteza tangenial, V
E
, la
elice, a crei mrime rezult din nsumarea vectorial a vitezelor VA i V
T
.
Fig. 1. 13
Observaii:
In cazul n care unghiul "" are valori mici, micarea principal va fi cea de rotaie, iar
dup direcie axial se va efectua micarea de avans. O problem mai deosebit o constituie
executarea canalelor cilindro-elicoidale cu unghiul de cca. 45.
In acest caz procedeul de prelucrare prin achiere nu mai poate fi strunjirea, adoptndu-
se fie frezarea, fie rectificarea.
Generarea suprafeelor pe maini- unelte
- 20 -
Pentru aceste dou ultime operaii micarea principal de achiere va fi cea efectuat
de sculele respective, n timp ce att "V
A
" ct i "V
T
" vor fi vitezele aferente avansurilor dup
cele dou direcii (axial i tangenial).
1.1.3.2.2. Directoarea cinematic ca nfurtoare a unei curbe
cinematice
In unele cazuri, n special la frezare, directoarea cinematica D, rezult ca infasuratoare a
unor curbe cicloidale C, fig.1.14, directoarea fiind plan, rectilinie fig.1.14.1, sau curbilinie
fig.1.14.b sau spatial, fig.1.14.c.
Aceste directoare sunt programate, ca form, pe elemente ale mainii-unelte(ghidaj-
sanie, fus-lagr), de pe care sunt trasnpuse pe pies pe cale cinematic,ele aprnd ca
infuratoare a unor curbe cinematice(in marea majoritatae curbe cicloidale), fig.1.15.
Fig. 1.14
Fig.1.15
c.
Maini- unelte si prelucrri prin achiere
- 21 -
Se consider punctul M, un punct oarecare de pe muchia achietoare a sculei, care se
rotete cu viteza unghiular
S
, egal cu viteza
R
. Centrul de rotatie O
R
al sculei se
deplaseaz cu viteza liniar V
U
.Din compunerea acestor micri, rezult traiectoria curb C,
de form cicloidal mAnoAMB, tangent n punctele M la directoarea D. Ca i in cazul
generatoarelor de acest gen, curba C se obine prin rularea rulantei de raz R
r
pe o curb B,
numit baz. Rularea fiind fr alunecare, rezult c se respect relaia:
R R R
R V e = (1.7)
Cum viteza relativ V
u
de deplasare a axei sculei, n raport cu suprafaa generat este egal cu
V
R
, iar
R
=
S
, relaia 1.7. devine :
S R U
R V e = (1.8)
de unde rezult mrimea razei rulantei:
R
S
u
R
V
=
e
(1.9)
1.1.3.2.3. Directoarea cinematic imprimat prin rulare
Unele traiectorii directoare spaiale, dificil; de realizat prin procedeele prezentate pot
fi obinute relativ uor printr-un procedeu de imprimare prin rulare, fig.1.16.
Fig.1.16 Fig.1.17
Curba directoare cinematic, D
, de forma a
.........., realizat ca traiectorie a unui
punct sau ca infuratoare a unei curbe cinematice, se imprim prin rulare pe cilindrul (piesa
de prelucrat) de raz R de pe planul
al directoarei , sub forma curbei spaiale a b c ..........a
directaorei D. Transpunerile prin rulare (fra alunecare) de directoare cinematice sunt utilizate
n diverse situaii ca de exemplu la generarea danturilor conice cu dini curbi, la care forma
dintelui este determinat prin curba din roata plan, figura1.17. Cea mai simpl dintre
directoarele cinematice dreapta AB din plan- se imprim din rulare pe un cilindru, sub form
de elice cilindric,fig.1.18. Metoda este folosit la prelucrarea roilor dinate cilindrice, cu
dantur inclinat.
Generarea suprafeelor pe maini- unelte
- 22 -
Datorit rulrii, fr alunecare, trebuie s fie indeplinit condiia:
p
R
V
=
e
(1.10)
n care R
p
este raza piesei cilindrice, respectiv a cilindrului de rulare a roii dinate. Spre
deosebire de elicea cilindric obinut prin compunerea unei micri de rotaie cu o micare
de translaie, viteza punctului M
nu este condiionat de nici un parametru al elicei.
1.1.3.3.Directoarea programat
Aceast directoare se realizeaz ca i directoarele cinematice cu comand
programat, folosindu-se abloane, modele sau alte tipuri de port-programe (benzi i cartele
perforate, benzi magnetice, dischete etc.).
Fig.1.19
Procedeul este utilizat la maina de frezare prin copiere i n unele cazuri i la
mainile de rectificat profilul camelor.n figura alturat se prezint cazul unei directoare
programate prin ablon, aferent frezrii unui canal pe o cam .
Fig.1.18
Maini- unelte si prelucrri prin achiere
- 23 -
1.2. Generarea suprafeelor reale
1.2.1.Suprafa i profil
Suprafaa obinut prin procesul efectiv de achiere difer de suprafaa generat
teoretic, datorit unor factori care intervin n desfurarea acestui proces i care dau natere
unor macro- i microneregularitai ale suprafeei.Aceti factori sunt cauzai de ctre
elementele componente ale sistemului tehnologic:maina-unealt, piesa, scula, dispozitivul
precum i de fenemoenele fizice specifice procesului de achiere.
Prin macrogeometria suprafeei unei piese se neleg abaterile de la forma teoretic-
geometric i abaterile de la poziia acestei suprafee n raport cu alte suprafae ale piesei, iar
prin micro geometria suprafeei se in elege rugozitatea ei.
Fig.1.20
Suprafaa geometric, figura1.20, a piesei este suprafaa teoretic reprezentat convenional
conform regulilor specifice desenului tehnic, deci fr abateri de form i de poziie i fr
rugozitate.
ntr-o seciune oarecare AA a suprafeei geometrice se obine profilul geometric. El
este determinat de forma geometric, teoretic a generatoarei sau directoarei.
Suprafaa real a aceleai piese este suprafaa care o limiteaz de mediul
nconjurtor, suprafa rezultat din procesul de achiere.Ea se caracterizeaz prin abateri de
la forma geometric, abateri de poziie i rugozitatea. O seciune oarecare AA prin suprafaa
real determin profilul real al acesteia.
Pentru stabilirea parametrilor dimensionali ai suprafeei reale i ai profilului real,
sunt utilizate diverse metode i aparate de masur i control care permit reproducerea mai
mult sau mai puin fidel a situaiei reale.Ca urmare a acestui fapt, se definete ca suprafa
efectiv, imaginea apropiat a suprafeei reale, obinut n urma efecturii masurtorilor
respective.Profilul efectiv, se definete ca i profilul geometric i cel real, ntr-o seciune
oarecare a piesei.El urmrete ndeaproape profilul real, aparnd ca o nfurtoare a acestuia.
Generarea suprafeelor pe maini- unelte
- 24 -
1.2.2. Generatoarea real
1.2.2.1. Generatoarea real materizlizat
Aa dup cum s-a mai artat, pentru generarea profilului unor piese de lungime mic,
se poate folosi ca generatoare forma muchiei achietoare a sculei, care va fi identic cu forma
generatoarei numai in cazul n care unghiul de degajare =0.
Pentru unghiul de degajare cu valoare diferit de zero,muchia achietoare a sculei va
reprezenta proiecia generatoarei din planul ei pe planul feei de degajare.In figura 1.21. se
exemplific obinerea (determinarea grafic) a proieciei unei generatoare de form
trapezoidal, aparinnd unei suprafee de rotaie, generat prin strunjire cu avans radial.
Fig.1.21.
Astfel, generatoarea se va proiecta sub forma A
V
1
2
B
, la care limea b rmne
aceeai, n timp ce nlimea devine h
> h; ca urmare unghiul <.
Dac se fac i proieciile unor puncte oarecare r si s de pe generatoarea AV
1
V
2
B , se
obin punctele r
i s
. Aceste puncte nu se vor afla pe dreapta A
1
ci pe o curb plan
rezultat din intersecia unui trunchi de con cu planul feei de degajare VW. Deci cele 2 laturi
rectilinii AV
1
si V
2
B ale figurii generatoare G vor trebui s fie materializate prin 2 muchii
achietoare curbilinii, de forma A
1
, dispuse n planul feei de degajare.
Generatoarea AV
1
V
2
B se afl n planul
al generatoarei. Caracteristicile
geomatrice ale acesteia sunt:
- nlimea, h
-limea, b
-unghiul, .
Directoarea D este circular de raz
R
p1
...............R
p2
.
Muchia achietoare a sculei se afl n
planul feei de degajare, a crui urm
VW face cu urma VA a planului
generatoarei unghiul . Proiecia
profilului AV
1
V
2
B al generatoarei pe
planul feei de degajare se va obine prin
proiecii circulare AA
, concentrice
cercului director D.
Maini- unelte si prelucrri prin achiere
- 25 -
Cuitul de strung, n mod obligatoriu, va trbui s fie prelucrat i in l ungul feelor de
aezare, pe direcia V
1
(V
2
)Z , pentru realizarea unghiului . Profilul cuitului pe aceast
direcie este determinat n planul N
1
(N
2
)A
, normal pe V
1
Z . Proiecia acestui profil
A
N
1
N
2
difer de precedenta prin naltimea h
<h
. Deoarece b
=b
, rezult c unghiul
va fi mai mare dect unghiul
. Deasemenea, laturile A
N
1
si N
2
sunt curbe i
diferite de A
1
, respectiv V
2
B
.
Faptul c aceste laturi ale figurii generatoare materializate sunt curbe, complic
execuia sculei i constituie o surs de deformare a profilului piesei.
Alte cauze care pot s duc la abateri al profilului piesei fa de forma generatoarei
din planul sunt urmatoarele:
poziionarea eronat a sculei n raport cu planul al generatoarei;
abateri al unghiurilor de aezare i degajare ( efective) ale sculei, fa de valorile indicate n
desenul de execuie al cuitului;
deformaia sistemului tehnologic de prelucrare;
uzura neuniform a muchiilor achietoare.
1.2.2.2.Generatoarea real cinematic
1.2.2.2.1.Generatoarea cinematic ca traciectorie a unui punct
Aa dup cum s-a- mai artat, generatoarea cinematic poate fi generat, teorectic, de
un punct K, fig.1.22, aflat n micare pe o traiectorie de o form oarecare, punctul K fiind
materializat prin vrful sculei.Practic ns acest vrf nu poate fi punctiform , nsensul
geometric, deoarece el nu poate asigura o utilizare economic a muchiei achietoare, astfel
nct uzura s se produc ntr-un timp acceptabil.Din aceste motive vrful teoretic K este
nlocuit,la generarea suprafeelor reale, printr-o mic muchie materializat, denumita
generatoare elementar G
E
(arcul AKC) care din punct de vedre al formei sale nu are nicio
legatur cu cea a generatoarei G.
Practica a demnstrat c forma cea mai adecvat a vrfului sculei,din punct de vedere
al construciei i exploatrii acestuia, este arcul de cerc de o anumit raza r. Suprafaa
obinut cu ajutorul unei astfel de generatoare elementare va prezenta nite neuniformitai sub
forma unor valuri de nlime h i pas s. Pentru determinarea nalimii acestor
microneregulariti se consider triunghiul OAB, fig.1.22. n care :
| )
2 2
2
h r r AB = ; dar
2
s
AB = .
Generarea suprafeelor pe maini- unelte
- 26 -
Deci:
2 2 2
2
2
4
h rh r r
s
+ = ; neglijnd h
2
ca fiind foarte mic rezult:
r
s
h
8
2
= (1.11)
Fig.1.22. Fig.1.23.
Din ultima relaie se observ ca avansul s are o mare influen asupra mrimii h a
microneregularitailor, cu reducerea acestuia obinndu-se o calitate a suprafeei prelucrate din
ce n ce mai bune.Dar micorarea lui s conduce la micorarea productivitii,astfel c pentru
obinerea unor suprafee de o calitate acceptabil se recurge la o alt soluie si anume,
utilizarea unei generatoare elementare G
E
, format dintr-un arc de cerc de raz r, fig.1.23,.
continuat printr-o tangent care face cu generatoarea cinematic, G, unghiul
1
.
Prin aceast construcie, odat cu micorarea lui h se imbuntete i rezistena la
rupere a sculei i implicit durabilitatea acesteia.
Aa dup cum se observ din fig.1.23., generatoarea cinematic G apare ca o
succesiune de generatoare elementare ABC , a cror proiecie, dup direcia generatoarei ,are
lungimea egal cu mrimea avansului s.
Mrimea t a distanei dintre suprafaa generat anterior i cea generat actual, este
denumit adncime de achiere.Att avansul s ct si adncimea de achiere t se alf n planul
generatoarei i se masoar, ca atare, n acest plan.
Traiectoriile generatoarelor cinematice, ce fac obiectul prezentului paragraf, se obin
prin intermediul elementelor ghidaj-sanie sau lagr-fus.Din aceast cauz , o deosebit
importan n obinerea corect a generatoarelor cinematice ca traiectorie a unui punct, o are
modul ce construcie, de execuie i de ntre inere a acestor mecanisme.
Deasemenea ,deformarea generatoarei se mai poate datora i vibraiilor, jocurilor n
asamblri i variaiei temperaturii n timpul funcionrii mecanismelor fus-lagr i respectiv
ghidaj-sanie.
Maini- unelte si prelucrri prin achiere
- 27 -
1.2.2.2.2.Generatoarea cinematic ca infuratoare a unei curbe
materializate
Generatoarea cinematic de acest gen, se obine, dup cum s-a mai artat, prin
rularea profilului conjugat, materializat prin muchia achietoare.
Orice abatere de la realizarea rulrii far alunecare de catre maina-unealt, duce la
deformarea generatoarei obinute.
Pe de alt parte, datorit periodicitii micrii de achiere i ca atare i a
discontinuitii detarii achiilor, generatoarea nu rezult ca o curb continu, ci ca o
succesiune de arce de curb sau drepte, fig.1.24., de lungime relativ mic.Asemnarea acestor
arce de curb, sau segmente de dreapt cu o generatoare elementar , G
E1
, G
E2
...........G
E4
,
permite s fie denumite n acest fel.
Fig.1.24.
Trebuie remarcat faptul c n timp ce la acest tip de generare iau parte la achiere alte
i alte poriuni din muchia tietoare a sculei, la realizarea practic a generatoarei cinematice
ca traiectorie a unui punct, se menine pe toat durata achierii aceeai portiune a sculei
achietoare, deci aceeai generatoare elementar.
In ambele cazuri , ns, generatoarea teoretic G rezult ca infasuratoare a
generatoarelor elementare, pe care le tangenteaz n punctele K
1
........K
n
.
Generarea suprafeelor pe maini- unelte
- 28 -
1.2.3.Directoarea real
1.2.3.1.Directoarea real materializat
Materializarea directoarei, adic programarea acesteia pe un suport material, este
posibil, dup cum s-a mai artat, prin construcia i utilizarea unor scule cum sunt:burghiele,
broele , tarozii etc.
Diferena dintre directoarea teoretic i cea real, n aceste cazuri, se datoreaz
tehnologiei de fabricaie a sculelor, care inevitabil da natere unor erori de form i de
dimensiuni.De asemenea, directoarele reale materializate mai pot diferi de cele teoretice
datorit influenei variaiei de temperatur i datorit uzurii sculei a chietoare.
1.2.3.2.Directoarea real cinematic
Ca i directoarea teoretic cinematic, directoarea real cinemtic se prezinta sub
patru forme i anume:
-punctiform;
-ca nfaurtoare a unor curbe cinematice;
- imprimat;
-programat;
1.2.3.2.1.Directoarea real cinematic punctiform
Aceast directoare este materializat, ca form , pe elemente ale mainii-unelte
(ghidaj-sanie;fus-lagr) de pe care este transpus pe pies pe cale cinematic. Ca urmare a
acestui fapt, precizia directoarelor reale cinematice, punctiforme este influenat de
corectitudinea construciei i funcionrii mecanismelor fus-lagr i ghidaj-sanie, ca i de
variaiile de temperatur inerente exploatrii mainilor-unelte.
1.2.3.2.2.Directoarea real cinematic, ca nfurtoare
Aa dup cum s-a mai artat, acest tip de directoare rezult ca infurtoare a unor
curbe cinematice, n general cicloide alungite. Sculele folosite n astfel de generri de
suprafee (freze, corpuri abrazive etc.), posednd un numr oarecare z
s
de generatoare, adic
dini achietori (sau granule abrazive), vor descrie la o rotaie, un acelai numr de curbe
ciclice identice, ns decalate ntre ele. Aceste curbe , descrise de punctele M
1
,M
2
..........,M
z
,
fig.1.25., se ntretaie, dnd natere curbelor mai mici A
1
A
2
,A
2
A
3
,................A
z-1
A
z
, tangente la
directoarea D teoretic. Aceste poriuni de arce de cicloid reprezint materializarea
traiectoriei punctului M pe suprafaa prelucrat a piesei i vor fi denumite directoare
Maini- unelte si prelucrri prin achiere
- 29 -
elementare. Modul de obinere al acestor directoare poate fi asemnat cu cel prin care se
realizau practic generatoarele elementare, deoarece n timpul rotaiei sculei, aceasta poate fi
considerat ca avansnd periodic, dup o direcie paralel cu directoarea teoretic D, pe o
distant egal cu avansul pe dinte u
z
. n acest mod, fiecare dinte poate fi considerat ca un ti
achietor pe care s-a materializat un arc de cicloid alungit de forma A
1
A
2
,A
2
A
3
,................
etc.
Fig.1.25.
Avnd n vedere aceast similitudine dintre modul de generare a curbelor directoare
i cele generatoare, rezult c nlimea h
z
a asperitilor ce apar pe suprafaa piesei obinute
prin frezare sau rectificare se poate calcula cu o relaie asemntoare celei prezentate n cadrul
paragrafului referitor la generatoarea cinematic real i anume:
s
z
s
z
z
D
u
R
u
h
4 8
2 2
= = (1.12)
unde D
s
reprezint diametrul sculei
Exprimnd avansul pe dinte, n funcie de avansul pe rotaie
s
r
z
z
u
u = i nlocuind
aceast expresie n relaia 1.12 se obine:
2
2
4
s s
r
z
z D
u
h
= (1.13)
Rezult c nlimea microasperitilor scade cu reducerea mrimii avansului u
r
, cu
mrirea diametrului sculei i a numrului de dini ai acesteia.
Generarea suprafeelor pe maini- unelte
- 30 -
1.2.3.2.3.Directoare real cinematic, imprimat prin rulare
Prelucrarea prin achiere cu directoare cinematic imprimat prin rulare este
caracteristic realizrii danturii roilor dinate conice cu dini curbi, de exemplu cu dantur
eloid. Erorile ce apar la acest gen de prelucrare ntre directoarea teoretic i cea real, se
datoreaz, n principal nerespectrii condiiei de rulare pe toat durata achierii, adic
p
R
V
=
e
=constant, V fiind viteza de deplasare liniar a axei piesei (sau sculei) iar
viteza unghiular.
Maini- unelte si prelucrri prin achiere
- 31 -
ntrebri de verificare a cunotinelor
1. Ce forme geometrice pot avea curbele utilizate, cu rol de generatoare i directoare, n
domeniul prelucrrilor pe maini-unelte?
2. Exemplificai cteva tipuri de suprafee ale pieselor ce nu pot fi executate pe maini-
unelte prin deplasarea de-a lungul unor curbe plane.
3. Care sunt semiplanele ce formeaz triedrul triortogonal care asigur precizarea poziiei
curbei generatoare n raport cu directoarea?
4. Clasificai i exemplificai, prin intermediul unor schie, curbele generatoare.
5. Indicai (pe baza unei schie) generatoarea cinematic ca traiectorie a unui punct n
cazul strunjirii unei suprafee cilindrice.
6. Precizai, n coordonate polare, cum poate fi obinut o generatoare G cvinematic ca
traiectorie a unui punct.
7. Ce se nelege prin noiunile rulant i baz?
8. Care este operaia de prelucrare prin achiere la care se aplic foarte frecvent curba
generatoare cinematic ca nfurtoare a unei curbe materializate n micare?
9. Care sunt principalele tipuri de curbe directoare din punct de vedere al complexitii
lor?
10. Care sunt mecanismele utilizate pentru obinerea curbelor directoare cinematice?
11. Care sunt principalele dou forme geometrice sub care se prezint directoarele
cinematice obinute ca traiectorie a unui punct?
12. Cum poate fi obinut, cinematic, o traiectorie elicoidal cil indric?
13. La generarea suprafeelor pe maini-unelte, unde sunt folosite transpunerile prin rulare
a directoarelor cinematice?
14. Cum se definesc noiunile profil real i suprafa efectiv?
15. Ce sunt generatoarele elementare?
16. Cum se definesc mrimile tehnologice avans (s) i adncime de achiere (t)?
17. Care sunt formele de baz sub care se pot prezenta directoarele reale cinematice?
Generarea suprafeelor pe maini- unelte
- 32 -
Maini- unelte si prelucrri prin achiere
- 33 -
Capitolul II
Obiectivele capitolului:
Definirea lanului cinematic generator.
Prezentarea general a unui lan cinematic generator.
Precizarea / clasificarea lanurilor cinematice generatoare.
Definirea lanului cinematic principal.
nsuirea cunotinelor privind structura lanurilor cinematice principale.
Definirea lanului cinematic de avans.
Prezentarea mrimii de ieire din lanul cinematic de avans.
Studiul structurii lanurilor cinematice de avans.
Precizarea particularitilor tehnologice ale unor l anuri cinematice.
LANURILE CINEMATICE ALE MAINILOR-
UNELTE
2.1. Definirea lanului cinematic generator.
Dup cum s-a vzut n capitolul precedent, generarea unei suprafee pe maina-
unealt poate fi considerat ca avnd loc prin deplasarea unei curbe generatoare n lungul
curbei directoare, implicnd astfel necesitatea unei micri relative ntre cele dou curbe.
Pe de alt parte, materializarea acestor dou curbe, n foarte multe cazuri, se face
pe cale cinematic, prin combinarea unor micri de pe traiectorii diferite, dispuse
spaial sau n plan, micri ale cror viteze trebuie s fie coordonate ntre ele.
Realizarea tehnic a acestor micri, a traiectoriilor i a vitezelor respective, ca i
coordonarea lor -necesare obinerii formei curbelor generatoare- implic utilizarea unor
mecanisme care s satisfac aceste cerine n condiii optime, adic ct mai apropiate de
cerinele teoretice, geometrice i cinematice.
Suprafeele generate pot fi identice ca form, ns diferite ca dimensiuni, astfel nct
Lanurile cinematice ale mainlori- unelte
- 34 -
se impune ca mecanismele cu ajutorul crora se obin curbele generatoare s aib
posibilitatea de a fi reglate funcie de parametrii dimensionali ai traiectoriilor pe care le
asigur acestea.
Pe de alt parte, procesul de achiere, la rndul su, cere ca viteza de deplasare pe
traiectoria directoare (viteza de achiere) s poat avea diferite mrimi, funcie de
parametrii de achiere. De asemenea, acelai proces de achiere, funcie i de rugozitatea
suprafeei generate, impune anumite mrimi de avans.
In afara necesitilor de mecanisme pentru generarea cinematic a suprafeelor
pieselor i a realizrii parametrilor procesului de achiere, o main-unealt necesit nc
un numr de mecanisme n scopuri cu totul diferite de precedentele, care nu intervin direct
n generarea suprafeelor, ns fr a cror prezena prelucrarea pe main ar fi
imposibil.
Astfel de mecanisme sunt cele care asigur prinderea piesei pe masina-unealt sau
alimentarea acesteia cu material.
Alte mecanisme permit controlul dimensiunilor suprafeei obinute sau controlul
bunei funcionri a ntregii maini-unelte.
Reglarea turaiilor, a vitezelor, a avansurilor necesit, de asemenea, mecanisme cu
att mai complexe, cu ct maina-unealt este mai automatizat.
Din cele de mai sus reiese c cinematica unei maini-unelte const dintr-un numr
oarecare de mecanisme care au destinaii precise.
Totalitatea mecanismelor care concur la realizarea unui anumit scop este denumit
lan cinematic.
n funcie de scop i avnd drept criteriu efectul aciunii lor, lanurile cinematice ale
mainilor-unelte se pot grupa n:
lanuri cinematice generatoare;
lanuri cinematice auxiliare.
Lanurile cinematice generatoare asigur obinerea formelor i a dimensiunilor
traiectoriilor directoare i generatoare, precum i a vitezelor pe aceste traiectorii, care
pot fi n unele cazuri viteza de achiere sau de avans.
Prin scopul lor, ele au caracteristici cinematice diferite de cele ale lanurilor
cinematice auxiliare i existena lor este obligatorie ntr-o main-unealt.
Astfel, fig. 2.1 reprezint, sub form schematic simplificat, mecanismele principale
ale mainii -unelte MM 582 de rectificat filet; n acest scop, maina posed mecanisme care s
asigure obinerea traiectoriei elicoidale de pas p
1
pe cilindrul de raz r, ceea ce se realizeaz
Maini- unelte si prelucrri prin achiere
- 35 -
cinematic prin compunerea unei micri de rotaie a piesei, care la periferie are o vitez
tangenial V
T
, cu o micare de translaie de vitez v
A
, n raport cu punctul M al pietrei
de rectificat.
Micarea de rotaie cu vitez tangenial v
T
se obine de la motorul electric M
E1
care antreneaz pompa P
DC
din al crui debit o parte este lsat s treac de ctre droselul
DR ctre motorul hidraulic M
H.
Inversorul I poate schimba sensul de rotaie al acestui
motor.
De la motorul hidraulic, micarea se transmite prin cele dou conuri n trepte C
1
i
C
2
care permit obinerea a trei turaii diferite pentru melcul z
1
ce angreneaz cu roata
melcat z
2
; mai departe, prin roile z
3
i z
4
, micarea de rotaie se transmite piesei P.
Pentru micarea de translaie de vitez V
A
, micarea se ia de la acelai ax pe care se
afl roata melcat z
2
i se transmite prin roile de schimb A, B, la urubul conductor
avnd pasul p
2
.
Fig. 2.1.
Procesul de achiere este realizat de discul abraziv S a crui vitez tangenial
viteza de achiere este determinat cinematic de diametrul su i turaia n
S
, asigurat de
motorul electric M
E2
prin roile de curea R
1
i R
2
.
Din aceast schem simplificat rezult c mecanismele: pompa PDC, droselul DR,
motorul M
H
, conurile n trepte C
1
i C
2
si angrenajele z
1,
z
2
si z
3
,z
4
sunt necesare pentru a
Lanurile cinematice ale mainlori- unelte
- 36 -
obine viteza tangeniala V
T
la periferia piesei de raz r, iar roile de schimb A, B, ca
si mecanismul piuli-urub, asigur viteza axiala v
A
- Dispunerea spaial a
traiectoriilor celor dou viteze n raport cu punctul M al discului conduce la realizarea
traiectoriei directoare elicoidale de pas p
1
pe cilindrul de raza r. Generatoarea este
materializat prin profilul discului abraziv, fa de care piesa se deplaseaz cu viteza
component v
E
, a crei mrime trebuie s corespund vitezei de avans.
Avnd n vedere scopul diferit al acestor lanuri cinematice, se poate defini ca lan
cinematic generator, totalitatea mecanismelor care asigur transmiterea si transformarea unei
micri oarecare, n cadrul unei maini-unelte, ntr-o micare pe o traiectorie directoare sau
generatoare, n condiiile impuse de cinematica generrii traiectoriei respective i cele ale
procesului de aschiere n scopul obinerei unei anumite suprafee.
Lanurile cinematice auxiliare asigur realizarea operaiilor auxiliare n procesul de
prelucrare pe maina-unealt. Prezena lor nu este obligatorie, operaiile respective putnd
fi efectuate i manual. Lanurile cinematice auxiliare contribuie la reducerea timpilor auxiliari
i deci la creterea productivitii.
Studiul acestor lanuri cinematice nu se ncadreaz n tematica prezentei lucrri.
2.2. Clasificarea lanurilor cinematice generatoare.
Traiectoriile directoare i generatoare necesare n generarea suprafeelor prin
procesul de aschiere snt foarte variate ca form, dup cum s-a artat n capitolul
privind geometria generrii suprafeelor.
Cu toate acestea, n majoritatea covritoare a cazurilor, ele se obin prin
combinarea cantitativa a traiectoriilor rectilinii i circulare.
Din aceast cauza, cea mai mare parte a lanurilor cinematice generatoare asigur
obinerea celor dou traiectorii, iar combinarea lor se realizeaz, prin asocierea lanurilor
cinematice n diferite moduri i cu respectarea anumitor legi.
Ca urmare, funcie de forma traiectoriei, lanurile cinematice ar putea fi denumite
lanuri cinematice pentru traiectorii rectilinii, circulare, elicoidale, spirale etc.
Totui, denumirea lanurilor cinematice generatoare s-a fcut pe alte criterii, mai
pregnant specifice procesului de aschiere, i anume pe criteriul obinerii vitezei de aschiere,
care a condus la denumirea de lan cinematic principal, i pe criteriul obinerii micrii de
avans, dnd natere denumirii de lan cinematic de avans.
Aceste denumiri bazate pe criteriul tehnologic nu in seam de forma traiectoriei pe care se
realizeaz parametrii procesului de aschiere, viteza de aschiere, respectiv avansul. Din
Maini- unelte si prelucrri prin achiere
- 37 -
aceast cauz, lanul cinematic principal ca i cel de avans pot realiza vitezele respective
att pe traiectorii rectilinii ct i pe traiectorii circulare.
In cazul traiectoriilor complexe, n genere nu exist o denumire a lanurilor
cinematice care concur la obinerea acestora.
Stabilirea unor denumiri pentru acestea prezint unele dificulti, datorit faptului
c denumirea lor ar trebui s fie legat de denumirea geometric a traiectoriei: lan
cinematic elicoidal, lan cinematic spiral, lan cinematic evolventic etc, a cror ncetenire
n limbajul curent este dificil, cu att mai mult, cu ct unele traiectorii au o circulaie
foarte restrns ,ca de exemplu, cicloid, eloid, spiroid etc, iar altele nici nu au denumiri
matematice, ca, de exemplu, profilul elicelor, al matrielor etc.
Suntem astfel tentai a denumi lanurile cinematice generatoare dup alte criterii, i
anume dup cele care definesc operaia prin care se obine suprafaa n cauz.
Astfel, se va defini ca lan cinematic de filetare acel lan cinematic care genereaz o
traiectorie elicoidal. Evident c i aceast denumire nu pare potrivit n unele cazuri ca, de
exemplu, la prelucrarea danturilor nclinate, a frezelor cu dini nclinai, a canalelor
burghielor etc, totui ponderea filetrii, n genere, la prelucrarea uruburilor fiind mare, se
consider c denumirea de lan cinematic de filetare se impune.
Pe aceleai considerente se va denumi lan cinematic de detalonare acel lan care
permite realizarea traiectoriilor spirale folosite n detalonare, dup cum se va denumi lan
cinematic de rulare, lanul cinematic care genereaz traiectoriile prin procedeul de rulare.
Avnd n vedere specificul tehnologic al primelor dou lanuri cinematice: principal i
de avans, se impune gruparea lor sub denumirea de lanuri cinematice tehnologice, iar pentru
celelalte, gruparea lor sub denumirea de lanuri cinematice generatoare complexe.
Ca urmare, clasificarea lanurilor cinematice generatoare se prezint sub forma:
Clasificarea nu este limitativ n ceea ce privete lanurile cinematice generatoare
complexe.
- principal
- avans
- filetare
- detalonare
- rulare
- copiere
etc.
Lanuri cinematice generatoare
-simple, cu traiectorie
liniara sau circulara,
denumite si tehnologice
-complexe
Lanurile cinematice ale mainlori- unelte
- 38 -
2.3. Lanuri cinematice principale
2.3.1.Definire.
In procesul de generare a suprafeelor prin achiere este necesar o micare de
deplasare a generatoarei, materializat prin muchia achietoare a sculei sau obinut pe cale
cinematic pe curba directoare.
Aceast micare, n raport cu un reper fix, batiul mainii-unelte, apare ca rezultnd n
unul din urmtoarele cazuri:
generatoarea mobil, directoarea fix, n cazul brorii, rabotrii pe eping etc;
generatoarea fix, directorea mobil, la strunjirea cilindric,rabotarea pe rabotez etc.;
generatoarea i directoarea mobil, la frezare i rectificare,n procesul de generare a
suprafeelor prin achiere, n cea mai mare parte a cazurilor generatoarea nu-i modific
forma, astfel nct viteza de deplasare a ei pe directoare nu este supus nici unor
restricii n ceea ce privete mrimea i sensul su. Ca urmare, mrimea vitezei de
deplasare se poate lua egal cu mrimea vitezei tehnologice de achiere, cerut de nsui
procesul de achiere.
Dificultile de realizare a vitezei tehnologice de achiere pe traiectoria directoare,
menionate n capitolul anterior, determin obinerea unei micri relative ntre
directoare i generatoare, ntre pies i scul, cu o vitez real de achiere, mai mult sau
mai puin apropiat de cea tehnologic.
Micarea relativ dintre pies i scul se obine cu ajutorul uneia sau a mai multor
lanuri cinematice, ale cror mrimi de ieire corespund traiectoriilor i vitezelor necesare
generrii suprafeei. Lanul cinematic care asigur pe traiectoria directoare sau pe una din com-
ponentele acestei traiectorii viteza principal de achiere, component a vitezei reale de
achiere, este denumit lan cinematic principal.
Fig. 2.2.
Maini- unelte si prelucrri prin achiere
- 39 -
Traiectoria directoare este realizat n majoritatea cazurilor prin combinarea a
dou sau mai multe traiectorii circulare sau rectilinii.
Astfel, n cazul filetrii pe strung sau al detalonrii (fig.2.2.), viteza real de
achiere (V
E
, respectiv v
S
) este tangent la traiectoria directoare, n timp ce viteza
principal de achiere, furnizat de lanul cinematic principal, este componenta v
T
,
tangent la un cerc de raz r.
Ca urmare, acest lan cinematic se poate defini astfel:
Lanul cinematic principal asigur pe una din componentele traiectoriei directoare viteza
principal de achiere, componenta cea mai mare a vitezei reale de achiere.
Definiia este valabil i n cazurile particulare, n care traiectoria directoare nu
rezult din combinarea mai multor traiectorii, de exemplu la rabotare, n care viteza
principal de achiere este identic cu viteza real de achiere.
2.3.2. Mrimea de ieire a lanului cinematic principal.
Lanul cinematic principal trebuie s furnizeze, pe o traiectorie circular sau rectilinie,
o mrime de ieire y
e
= v
a
, denumit, dup cum s-a vzut, vitez principal de achiere.
Pentru o traiectorie circular, mrimea vitezei se exprim prin
1000
2
as
as
rn
v
t
= [m/min]
n care r, n mm, este raza piesei sau a sculei, iar n
a
, n rot/min, turaia acestora.
n cazul traiectoriilor rectilinii, funcie de genul mecanismului care asigur micarea,
aceasta poate fi continu sau alternativ. n cazul micrii continue, viteza este uniform
i se exprim prin
T
l
v
as
1000
= [m/min]
unde l, n mm, este mrimea spaiului parcurs ntr-un ciclu de achiere, iar T, n min,
durata acestui ciclu.
Micarea rectilinie alternativ poate fi realizat cu vitez uniform (mecanisme cu
piuli-urub, pinion-cremalier, cilindru-piston etc.) sau cu vitez variat (mecanism cu biel-
manivel, culis oscilant etc).
In ambele cazuri, un ciclu cinematic const dintr-o curs dubl de mrime l,
parcurs cu viteza v
a
=v
1
n cursa de lucru, i cu viteza v
2
, n cursa de napoiere.
ntre cele dou viteze, exist relaia
1
2
v
v
k =
Lanurile cinematice ale mainlori- unelte
- 40 -
k fiind mai mare dect unitatea i constant sau variabil, funcie de genul mecanismului.
Dac T
1
i T
2
snt timpii necesari parcurgerii cursei ntr-un sens i cellalt, atunci
1
1
1000T
l
v = si
2
2
1000T
l
v =
Timpul necesar unei curse duble fiind T=T
1
+T
2
, se poate scrie c T
1
=TT
2
, astfel c
| )
2
1
1000 T T
l
v
=
Pe de alt parte, ntruct v
2
= kv
1
,
2
1
1000T
l
kv =
de unde, scond expresia lui T2 i introducnd-o n aceea a vitezei v
1
, rezult
T
l
k
k
v v
as
1000
1
1
+
= =
Timpul T necesar unei curse duble se poate exprima funcie de numrul de curse
duble pe minut prin
as
n
T
1
=
Ca urmare, expresia vitezei principale de achiere n cazul micrii rectilinii
alternative este:
1000
1
as
as
n l
k
k
v
+
=
Remarcnd c produsul 2r, n cazul traiectoriei circulare, reprezint mrimea
spaiului parcurs ntr-un ciclu, toate cele trei expresii ale vitezei principale de achiere
se pot exprima prin:
1000
1
as
as
n L
v
= [m/min]
n care este egal cu unitatea, n cazurile micrilor circulare i rectilinii continue, i egal
cu {1+k)/k, n cel al micrii rectilinii alternative, L fiind egal cu mrimea spaiului parcurs
ntr-un ciclu de achiere, iar n
a
, numrul de cicluri pe minut (rot/min sau curse duble/min).
Ca urmare, lanurile cinematice principale de orice natur ar fi ele trebuie s asigure
la captul de ieire, indiferent dac traiectoria este circular sau rectilinie, iar micarea
continu sau alternativ, o mrime de ieire y
e
=v
a
, definit prin ultima expresie.
Maini- unelte si prelucrri prin achiere
- 41 -
2.3.3. Structura lanului cinematic principal.
Scopul lanului cinematic principal fiind de a asigura viteza principal de achiere,
reglabil ca mrime ntre cele dou limite ale domeniului de variaie al ei, pe o traiectorie
circular sau rectilinie, de diverse mrimi, funcie de dimensiunile piesei sau ale sculei,
trebuie s conin un numr de mecanisme care s satisfac aceste cerine.
Lanul cinematic principal este antrenat totdeauna de un motor, exceptnd micile
maini-unelte acionate manual, a crui micare transmis n lan trebuie s poat fi nu
numai reglat pentru obinerea vitezei de achiere corespunztoare, ci i inversat ca sens i
oprit sau pornit.
Pentru micarea circular, un lan cinematic principal mecanic poate fi reprezentat
sub form structural ca n fig.2.3.
Motorul M, n general motor electric, furnizeaz mrimea de intrare y
i
, turaia n
o
,n
lanul cinematic. Cuplajul C permite transmiterea sau ntreruperea micrii n lan, iar
frnarea acestuia se face prin intermediul frnei F. Inversarea sensului micrii este asigurat
de inversorul
Fig.2.3.
I n cele dou poziii ale sale. Mecanismul de reglare a turaiilor, variatorul V
n
, asigur
turaiile necesare, care funcie de mrimea r a piesei sau a sculei determin viteza principal
de achiere.
Trebuie de remarcat c funcia acestui ultim mecanism care transform turaia n (sau
pe ) ntr-o vitez tangenial v
a
este ndeplinit n foarte multe cazuri de nsi piesa sau
scula, prin mrimea razei r a ei, spre deosebire, de exemplu, de sania port-cuit de pe
platoul mainilor orizontale de alezat i gurit, care ndeplinete n mod special aceast
funcie.
Lanurile cinematice ale mainlori- unelte
- 42 -
Fig.2.4.
Sistemele hidraulice snt puin folosite n lanul cinematic principal i n aceste cazuri
se prezint sub form de agregat variator hidraulic care const (fig.2.4.) dintr-o
pomp P cu palete sau pistonae i un motor hidraulic rotativ M
H
, similar pompei din punct
de vedere constructiv.
Variaia turaiei motorului hidraulic, inversarea sensului de rotaie, pornirea i
oprirea micrii se obin acionnd asupra excentricitii rotorului pompei sau a motorului
hidraulic.
Grupul Ward-Leonard este sistemul electric tipic folosit ca lan cinematic principal la
mainile-unelte grele. El const (fig.2.5.) dintr-un grup de patru maini electrice: un motor
Fig.2.5.
de curent continuu M
CC
, un generator de curent continuu G
CC
i o excitatrice E
CC
.
Combinaia acestor maini electrice permite varierea comod i economic a turaiei
motorului de curent continuu, precum i inversarea sensului su de rotaie.
Micarea rectilinie alternativ, cu vitez de achiere, se realizeaz prin lanuri
cinematice principale mecanice, similare celor pentru obinerea micrii circulare, crora li
se adaug un mecanism de transformare a micrii circulare n rectilinie alternativ.
Funcie de genul acestui mecanism se pot distinge dou grupe de posibiliti de
transformare a micrii de rotaie n micare recti linie alternativ.
Maini- unelte si prelucrri prin achiere
- 43 -
Fig.2.6.
In prima grup intr mecanismele care asigur ele nsei inversarea (fig.2.6.), ca
mecanismul biel-manivel i culis oscilant, caracterizate prin faptul c mrimea cursei se
regleaz prin variaia mrimii razei manivelei, ca i prin faptul c mrimea coeficientului k
= v
2
/v
1
este constant, pentru oricare mrime a vitezei de achiere v
1
.
A doua grup de mecanisme folosite n lanurile cinematice principale pentru transformarea
micrii circulare n rectilinie: pinion-cremalier i urub-piuli, necesit mecanisme de
inversare a sensului micrii (fig.2.7.), precum i un lan cinematic auxiliar pentru
napoiere rapid (n schem trasat cu linii ntrerupte),ca i lanuri cinematice de comand
(trasate cu linie-punct) pentru comanda inversorului I, de ctre limitatorii O
1
i O
2
.
Fig.2.7.
La aceste lanuri cinematice principale, coeficientul k este variabil, deoarece n
toate cazurile v
2
este constant, n timp ce v
1
, fiind viteza de achiere, variaz funcie de
necesitile procesului de achiere.
Sistemele hidraulice pentru obinerea vitezei de achiere pe traiectorii rectilinii
(raboteze, maini de broat etc.) folosesc pompe cu debit variabil (fig.2.8.) i motor
hidraulic T
R
cu micare rectilinie (piston-cilindru). Inversarea sensului micrii i obinerea
vitezei v
2
de napoiere se realizeaz, printr-un lan cinematic de comand care acioneaz
asupra excentricitii pompei. Coeficientul k este n genere variabil, v
2
fiind de obicei
constant.
Lanurile cinematice ale mainlori- unelte
- 44 -
Fig.2.8.
Lanurile cinematice electrice utilizate ca lanuri cinematice principale pentru
micarea rectilinie constau dintr-un grup Ward-Leonard (fig.2.5.), care la captul de ieire
antreneaz un mecanism de trasnformare a micarii circulare in miscare rectilinie, de
obicei pinion-cremaliera sau urub-cremaliera.
2.4. Lanuri cinematice de avans
2.4.1. Definire.
Mrimea avansului s, t sau u reprezint una din dimensiunile achiei eliminate n
procesul de achiere (fig.2.9. Avansul s, denumit avans de achiere, este realizat n lungul
generatoarei G generate cinematic, corespunznd mrimii generatoarei elementare G
E
i
poziionrii succesive a acesteia.
Avansul t, denumit i adncime de achiere, normal pe suprafaa generat, este
distana dintre dou poziii succesive ale directoarei D, adic distana D'D", D"D"' etc.
Avansul u, denumit avans director, reprezint mrimea directoarei DE n generarea
cinematic a directoarei D', D".
Toate cele trei avansuri snt realizate periodic, dup cicluri diferite. Astfel, n cazul
frezrii din fig. 2.9, avansul u se produce o dat la un ciclu cinematic, avansul s o dat la
un ciclu corespunznd prelucrrii pe lungimea l a directoarei, iar avansul t o dat la un
ciclu determinat de timpul necesar generrii generatoarei de lungime b.
Ordinea n care pot fi realizate cele trei avansuri poate fi i alta, astfel nct
mrimea ciclului de poziionare a unui aceluiai avans poate fi diferit.
In cele ce urmeaz se va folosi notaia s pentru cazul general, subnelegnd oricare din
cele trei avansuri i ne vom referi la cazul n care avansul s (deci i t sau u) este realizat
ciclic, corespunztor ciclului cinematic de achiere, adic o dat pe rotaie sau pe curs
dubl, celelalte cazuri putnd fi uor aduse la cazul general sau interpretate ca atare.
Maini- unelte si prelucrri prin achiere
- 45 -
Poziionarea repetat a generatoarei elementare G
E
= S implic necesitatea unei
micri de avans ntre scul i piesa, n care scop este necesar un numr de mecanisme
corespunztor, a cror totalitate formeaz lanul cinematic de avans.
Definiia lanului cinematic, de avans, din
punct de vedere funcional, poate fi dat sub forma
urmtoare:
Lanul cinematic de avans asigur
poziionarea ciclic, pe una din traiectoriile
generatoare (D sau G) a elementului generator
(D
E
sau G
E
) sau poziionarea ciclic a
generatoarei pe directoarele succesive necesare
generrii suprafeei.
2.4.2. Mrimea de ieire din lanul cinematic de avans.
Lanul cinematic de avans, trebuind s asigure poziionarea ciclic, printr-o micare
de avans, aceast poziionare poate avea loc pe o durat de timp T
i
mai mic sau cel mult
egal cu timpul T
CC
n care se produce ciclul cinematic.
Din aceast cauz, viteza cu care se face micarea de poziionare, denumit vitez
de avans, se va exprima prin:
'
1
T
s
v
av
= [mm/min]
Viteza de avans este variabil, deoarece, datorit periodicitii micrii de avans,
mrimea sa n momentul iniial i final este zero, ntre aceste momente ea avnd i o
valoare maxim, modul de variaie depinznd de caracteristicile cinematice ale
mecanismului
sau mecanismelor care asigur micarea. Din aceast cauz, aa cum s-a artat anterior,
expresia de mai sus determin viteza medie de avans.
Timpul T
1
, pe durata cruia are loc micarea de avans, fiind mai mic sau cel mult
egal cu durata T
CC
a unui ciclu, se poate exprima funcie de acesta prin
CC
T k T =
' '
1
n care k' poate varia ntre zero i unitate. Pe de alt parte, ntruct
as
CC
n
T
1
=
Fig.2.9.
Lanurile cinematice ale mainlori- unelte
- 46 -
n care n
a
este numrul de cicluri cinematice de achiere pe minut (rot/min sau c.d/min),
expresia vitezei medii de avans capt forma:
'
k
n s
v
as
av
=
Pentru aceeai mrime de avans s i acelai numr de cicluri cinematice n
a
, mrimea
vitezei medii de avans poate avea valori diferite, funcie de mrimea coeficientului k',
depinznd de caracteristicile cinematice ale mecanismului de avans. Viteza de avans este
variabil ntre extrema k' = 1, cnd T
1
= T
CC
micarea de avans se produce pe toat
durata ciclului de achiere avansul fiind denumit avans continuu, caz particular n
care viteza de avans este constant, i extrema k'=0, n care viteza de avans este
teoretic infinit, timpul T
1
n care se efectueaz micarea de avans fiind nul, caz de
asemenea particular ntlnit la prelucrarea cu broa, tarodul, filiera etc, scule la care
mrimea avansului s este materializat prin diferena dintre nlimile dinilor alturai.
2.4.3. Structura lanului cinematic de avans.
Mrimea avansului s se realizeaz pe traiectorii rectilinii sau circulare, folosindu-se me-
canisme mecanice de genul urub-piuli, pinion-cremalier, cam-tachet i mese sau prghii
rotative. Sistemele hidraulice cu piston-cilindru snt folosite cu succes n special la
realizarea avansului continuu, pe traiectorii rectilinii.
Lanurile cinematice de avans mecanice conin pe lng unul din mecanismele
citate i mecanisme speciale (fig.2.10), avnd scopuri bine definite n funcionarea
acestora.
Lanul cinematic de avans posed un mecanism C
1
de pornire-oprire a micrii, un
inversor I pentru schimbarea sensului micrii de avans, un mecanism K
s
de transmitere
periodic a micrii numai pe durata T
1
din ciclu, mecanism neexistent n cazul n care
avansul este continuu, un variator de avans V
s
pentru obinerea diferitelor mrimi de avans
s i mecanismul T
R
de transformare a micrii de rotaie n micare de translaie.
Fig.2.10.
Maini- unelte si prelucrri prin achiere
- 47 -
n afara acestora, lanurile cinematice de avans posed un cuplaj C
2
, care permite
acionarea manual, cu manivela m, a ultimului mecanism T
R
, n scopul poziionrii iniiale a
ansamblului scul-pies, precum i pentru realizarea avansului manual.
Dac avansul se face pe traiectorii circulare, mecanismul de transformare a micrii
circulare T
R
lipsete.
Sistemele hidraulice folosite n lanurile cinematice de avans posed mecanisme
(fig.2.11) care ndeplinesc aceleai funcii: droselul D
R
regleaz mrirea avansului s,
sertraul C
1
permite pornirea sau oprirea micrii, prin dirijarea uleiului n sistemul
hidraulic sau la
Fig.2.11.
rezervor, I este un sertra distribuitor care schimb sensul de micare a motorului hidraulic
M
H
- Cuplajul C
2
permite acionarea manual a motorului M
H
, deci a mesei mainii.
Lanurile cinematice de avans pot fi i complexe: hidromecanice, hidropneumatice sau
electrice.
2.4.4.Lanuri cinematice de avans realizate cu mecanisme de naturi
diferite.
Realizarea avansurilor periodice ca i a celor continue ridic probleme
specifice.Astfel, n cazul avansului periodic s pe durata de timp T
1
, de obicei foarte mic
n raport cu timpul T
CC
al ciclului cinematic, mecanismul de fracionare a micrii ca i
portiunea de lan cinematic pn la captul de ieire sunt supuse unor solicitri periodice
foarte mari, datorit variaiei vitezei ntre zero i valoarea maxim a ei, cu revenirea la
zero ntr-un timp foarte scurt. Pe de alt parte, reglarea ct mai fin a mrimii avansului s,
funcie de rugozitatea dorit a fi obinut, reprezint o alt problem dificil de rezolvat.
Aceste cauze au dus la folosirea n lanul cinematic de avans a mecanismelor de naturi
diferite:
Lanurile cinematice ale mainlori- unelte
- 48 -
Fig. 2.12.
hidraulice, pneumatice i electrice, dnd natere la lanuri cinematice complexe.
Figura 2.12 reprezint schema unui lan cinematic de avans hidromecanic pentru avans
periodic. Mrimea
s
, este furnizat de un mecanism cu cremalier, acionat de un motor
hidraulic M
H
. Mrimea lui
s
este condiionat de mrimea cursei C
s
a pistonului solidar cu
cremalier, curs care poate fi reglat cu urubul limitator A,ndeplinind din aceast
cauz funcia de variator de avans.
Frecvena furnizrii lui
s
este identic cu aceea a micrii mesei B, care, prin opritorii
O
1
i O
2
, comand inversorul I .napoierea pistonului n poziia iniial este asigurat de
un resort R. n timpul napoierii, mecanismul de avans T
R
nu este acionat, deoarece
cuplajul C este cu unisens.
Un lan cinematic de avans cu acionare hidromecanic, tot pentru avans periodic,
este reprezentat n fig. 5.20. Sistemul hidraulic cu inversorul I acioneaz motorul oscilant
M
H
care livreaz totdeauna o rotaie de unghi
0
constant. Transformarea lui
0
n
s
se
obine cu variatorul de avans V
s
, care const n majoritatea cazurilor dintr-un mecanism cu
clichet. Acesta poate fi reglat a antrena, de la un dinte pn la un numr oarecare de dini
ai roii de clichet, variindu-se astfel mrimea lui
s
. Cuplajul C are acelai rol ca i n cazul
precedent i funcia sa este ndeplinit de nsui clichetul, n cazul folosirii acestui mecanism
ca mecanism de variaie a avansului.
Lanurile cinematice pentru avans continuu nu necesit mecanismul de fragmentare a
micrii, ns ridic o problem aparte, aceea a meninerii constante a vitezei de avans i
aceasta, n special, n cazul sistemelor hidraulice.
Maini- unelte si prelucrri prin achiere
- 49 -
Fig. 2.13.
O schem obinuit de realizarea vitezei de avans pe cale hidraulic este reprezentat
n fig. 5.21, motorul hidraulic M
H
putnd fi cu micare rectilinie, ca n figur, sau cu
micarea de rotaie. Mrimea vitezei de avans se regleaz cu droselul D
R
care face funcie
de variator de avans. Sensul micrii de avans este determinat de poziia inversorului I.
Fig.2.14.
Datorit variaiei efortului de achiere, mrimea vitezei de avans variaz, ceea ce
duce la o rugozitate neuniform a suprafeei. Meninerea constant a vitezei de avans se
realizeaz cu stabilizatorul de vitez S
V
.
In ultimul timp, o oarecare extindere a luat acionarea hidro-pneumatic (fig. 2.15),
care const dintr-un cilindru motor M
P
acionat pneumatic prin inversorul I. Meninerea
constant a vitezei de avans se realizeaz cu ajutorul unui circuit hidraulic nchis, constnd
dintr-un cilindru hidraulic C
H
, un stabilizator S
V
i un drosel D
R
.
Lanurile cinematice ale mainlori- unelte
- 50 -
Tijele celor dou pistoane fiind
solidare, la deplasarea, de exemplu, spre
drepta a acestora, uleiul din faa
pistonului trebuie s treac prin drosel
i stabilizator, pentru a putea ajunge
n spatele aceluiai piston. Droselul
asigur mrimea vitezei de avans, iar
stabilizatorul, constana acestei mrimi.
Sistemul prezint avantaje economice prin simplificarea sistemului hidraulic, ca i
prin utilizarea ca energie, pe cea a aerului comprimat, existent n mod curent n
ntreprinderi.
Lanurile cinematice de avans electrice au n genere o construcie complicat a prii
electrice, prin utilizarea unor maini electrice speciale de curent continuu (amplidin, rototrol
etc), fiind utilizate n construcia mainilor-unelte grele i a mainilor-unelte de copiat.
Fig.2.15.
Aer
comprimat
Maini- unelte si prelucrri prin achiere
- 51 -
ntrebri de verificare a cunotinelor:
1.Ce se nelege printr-un lan cinematic al unei maini-unelte?
2.Care sunt cele 2 grupe mari de lanuri cinematice din componena unei maini-
unelte?
3.Precizai cele mai importante funcii/ roluri ale unui lan cinematic generator.
4.Prin ce se caracterizeaz lanurile cinematice auxiliare ale unei maini-unelte?
5.Cum pot fi clasificate lanurile cinematice generatoare?
6.Defini lanul cinematic principal.
7.Pentru ce lan cinematic este mrime de ieire, viteza principal de achiere?
8.Schiai structura unui lan cinematic principal hidraulic pentru micare circular.
9.Ce reprezint noiunea avans director?
10.Cum poate fi definit lanul cinematic de avans din punct de vedere funcional?
11.Prin ce unitate de msur se exprim, n general, viteza de avans?
12.Prin ce se caracterizeaz avansul generat de sistemele hidraulice cu piston-
cilindru?
13.Precizai 3 tipuri de lanuri cinematice de avans realizate cu mecanisme de naturi
diferite.
14.Ce funcie ndeplinete componenta drosel n cadrul unui lan cinematic de
avans?
Maini- unelte si prelucrri prin achiere
- 53 -
CAPITOLUL III
Obiectivele capitolului:
Prezentarea general a micrilor de generare a suprafeelor pe maini -unelte.
Definirea micrii principale.
Precizarea micrilor complementare sau de avans.
Definirea sistemului de referin cinematic al mainilor-unelte.
Studiul parametrilor procesului de prelucrare prin achiere.
Evidenierea factorilor care influeneaz prelucrrile prin achiere.
Rolul mainii-unelte n procesul de achiere.
Definirea i rolul sculei achietoare n procesul de achiere.
Prile componente ale sculei achietoare.
BAZELE PRELUCRRILOR PRIN ACHIERE PE
MAINI-UNELTE
3.1.Cinematica procesului de prelucrare prin achiere.
Micrile n procesul de generare prin achiere sunt micri relative ntre piesa de
prelucrat i partea achietoare a sculei.Aceste micri sunt necesare att generrii suprafeelor
ct i realizrii procesului de achiere.
De la caz la caz, unele dintre aceste micri iau parte direct la procesul de generare
prin achiere, iar altele au numai roluri auxiliare, cum ar fi : micarea pinolei, ppuii mobile
pentru prinderea piesei ntre vrfuri, micarea bacurilor pentru fixarea piesei n universal,
micrile sniilor pentru reglarea sculelor naintea fiecrei faze sau treceri de lucru etc.
Micrile din prima categorie sunt micri de generare, iar cele din a doua micri auxiliare.
Bazele prelucrrilor prin achiere pe maini- unelte
- 54 -
3.1.1. Structura micrii de generare
Dintre toate micrile de generare care se produc simultan n cadrul unui proces
oarecare de achiere, una dintre acestea se distinge ca micare principal, iar celelalte sunt
considerate micri complementare sau de avans. Rezultanta tuturor este micarea efectiv
de achiere.
3.1.1.1. Micarea efectiv
n cazul general, o suprafa real se genereaz prin achiere, dac cele dou curbe G
si D ale suprafeei teoretice corespunzatoare ei, sunt generate cinematic simultan, adic
realizate prin generare cinematic.
n acest scop elementul
generator GE, materializat prin
tiul sculei aschietoare, fig.3.1.a.
, trebuie s se deplaseze simultan
n lungul directoarei teoretice D,
prin micarea de generare a
suprafeei, cu viteza
d
v , i n
lungul generatoarei teoretice G ,
prin micarea cu viteza
g
v ,
aceasta din urm fiind micarea
de avans de vitez
s
v .
Cele dou micri efectuate simultan de elementul generator se compun n spaiu,
obinndu-se o micare relativ rezultant, ntre elementul generator, ce aparine sculei
achietoare, i suprafaa real ( prelucrat ) ce se genereaza pe piesa n cauz.
Aceast micare relativ n urma creia se ndeprteaz adaosul de prelucrare sub
form de achii, se numete micare efectiv de achiere, avnd ca traiectorie, o rezultant a
traiectoriilor generate prin cele dou micri ce se compun, adic traiectoria directoare D i
Fig. 3.1.
a
b
Maini- unelte si prelucrri prin achiere
- 55 -
respectiv traiectoria generatoare G, denumit traiectoria micrii efective de achiere ,Tr
a
,
fig.3.1.a.
Viteza cu care se efectueaz micarea efectiv de achiere , este rezultanta vitezelor
celor dou micri componente i se obine din nsui cinematica de generare a suprafeei
reale respective. Aceast vitez se numete vitez efectiv de achiere
as
e
v , i este tot
timpul tangent la traiectoria micrii efective de achiere, Tr
a
. Valoarea acestei viteze se
poate calcula cu relaia:
as
e
v
=
d
v
g
v +
( 3.1.)
Cazurile practice de generare a suprafeelor reale pe maini-unelte consemneaz faptul
c , viteza
g
v este extrem de mic , ca marime , fa de cea a vitezei efective de achiere.
Rezult deci c, viteza
d
v este componenta cea mai apropiat ca marime de viteza efectiv de
achiere, i ca atare ea se numete viteza principal de achiere, astfel c
d
v =
as
v .
Intruct micarea cu viteza v este micarea de avans n generarea dat, ca i ea se
efectueaz cu viteza de avans
s
v , rezult identitatea:
s g
v v = , i ca urmare, expresia
vectorial a vitezei efective de achiere (3.1) capt forma:
s p e
v v v
as as
+ =
( 3.2.)
Mrimea acestei viteze se calculeaz cu uurin, dac se cunoate unghiul , figura
3.1,b, dintre cele dou viteze componente:
o cos 2
2 2
+ + =
s p s p e
v v v v v
as as as
( 3.3.)
Cunoscnd c micarea efectiv de achiere este acea micare relativ dintre elementul
generator al sculei achietoare i piesa-semifabricat,ce are drept scop ndeprtarea adaosului
de prelucrare sub form de achii, rezult c,datorit ei se genereaz suprafaa de achiere i,
o dat cu aceasta un element al suprafeei prelucrate.
Bazele prelucrrilor prin achiere pe maini- unelte
- 56 -
Fig.3.2.
Exemplul unei strunjiri longitudinale, fig. 3.2, ilustreaz foarte bine acest aspect.
Reiese astfel c, micarea efectiv de achiere este ,n fond, micarea de generare a suprafeei
de achiere, a crei traiectorie este Tr
a.
tiind c micarea efectiv de achiere rezult din compunerea micrii principale cu
micarea de avans , iar micarea principal poate fi o micare simpl, de rotaie sau de
translaie, n timp ce micarea de avans, n cazul general, poate rezulta din compunerea, de
asemenea, a unor micri simple, nseamn c n cazul general al generrii prin achiere a
suprafeelor reale (prelucrate) pe mainile-unelte, micarea efectiv de achiere rezult din
compunerea unui anumit numr de micri simple, care se denumesc complementele
micarii de achiere.
3.1.1.2Micarea principal
Dintre componentele micrii efective de achiere, n cazul generrii unei suprafee
reale date, una singur (i numai una) constituie micarea principal i ea se efectueaz cu
viteza principal de achiere
as p
v
. Celelalte componente rmase sunt micri de avans (sau
micri complementare de generare) i ele se efectueaz cu viteza de avans
s
v (sau cu viteze
cg
v ).
Maini- unelte si prelucrri prin achiere
- 57 -
Viteza principal de achiere,
as p
v
este viteza elementului generator n micarea
principal i ea este tangent la traiectoria acestei micri, ce poate fi traiectoria directoare
sau, n cazurile particulare ale generrii prin frezare, rectificare, strunjire a filetelor etc. , una
din componentele traiectoriei directoare.
Privind tipul micrii principale i direcia vitezei principale de achiere
as p
v
cu care se
efectueaz, se disting dou cazuri:
1. La generarea suprafeelor reale, la care directoarea D se realizeaz ca traiectorie a
unei micri simple, de rotaie sau de translaie, viteza principal de achiere este viteza
elementului generator n lungul traiectoriei directoare i, implicit micarea principal o
reprezint acea micare simpl.
Este cazul generrii suprafeelor reale prin mai multe procedee de generare prin
achiere, ca de exemplu: prin strunjire, figura 3.2, sau rabotare, prin burghiere, figura 3.3,
2. n cazurile de generare, n care directoare teoretic D se realizeaz ca traiectorie(sau
arce de traiectorie) a unei micri rezultante, obinute prin compunerea mai multor micri
simple, de rotaie sau de translaie, viteza principal de achiere este viteza elementului
generator n lungul celei mai apropiate traiectorii componente a traiectoriei directoare.
Rezult astfel c micarea principal reprezint acea micare simpl avnd aceast
traiectorie component.
Generrile de acest fel,considerate particulare cazului general, sunt specifice frezrii i
rectificrii suprafeelor reale, strunjirii filetelor etc.
De exemplu, la frezarea unei suprafee plane, figura 3.4 ,directoarea teoretic D se
realizeaz ca nfurtoare a unei curbe cinematice, adic a directoarei elementare D
e
, ce
sau alezare etc.
Fig. 3.3.
Bazele prelucrrilor prin achiere pe maini- unelte
- 58 -
reprezint un arc al directoarei reale D
real
. Cum aceasta din urm este traiectoria micrii
rezultate din micarea de rotaie a frezei, n
a
i micarea de avans a sculei fa de semifabricat
s
v micarea rezultant denumit mai sus micare de achiere, rezult c traiectoria D
real
se
confund cu traiectoria micrii de achiere, Tr
a
.
Fig. 3.4.
Ori, tangent la traiectoria Tr
a
(D
real
) este viteza efectiv de achiere,
as
e v , i n
consecin, viteza de achiere v
a
va fi viteza tangent la traiectoria circular cea mai apropiat
traiectorie component a directoarei reale, D
real.
Rezult astfel c micarea principal este dat de micarea de rotaie a frezei, a crei
traiectorie circular se parcurge cu viteza principal de achiere,
as p
v
.
n baza aceluiai raionament la rectificarea suprafeelor reale, figura.3.5, micarea
principal este micarea de rotaie a discului de rectificat.
Fig. 3.5. Fig. 3.6.
Maini- unelte si prelucrri prin achiere
- 59 -
n cazul strunjirii filetelor, fig.3.6, directoarea suprafeei elicoidale a acestora este
elicea cilindric D. Pentru realizarea sa cinematic, se compune micarea de rotaie a piesei,
n
a
,
care asigur pe traiectoria circular viteza tangenial
T
v , cu micarea rectilinie de
deplasare axial a sculei
s
v , astfel nct s existe ntre ele o coordonare cinematic pentru a
se obine traiectoria directoare elicoidal D, de pas p i unghiul cunoscute.
Micarea rezultant a acestor micri componente este micarea efectiv de achiere i
deci, traiectoria directoare D fiind tocmai traiectoria micrii de achiere Tr
a
, viteza efectiv
de achiere va fi tangent la traiectoria directoare D.
Dac unghiul de nclinare al elicei, e < 45 (cazul filetelor cu pas normal) atunci
traiectoria circular este mai apropiat de traiectoria elicoidal dect cea rectilinie i, n
consecin, viteza principal de achiere
as p
v
, se atribuie vitezei
T
v , adic, micarea de rotaie
n
a
constituie micarea principal.
n cazul filetelor cu pas mare i foarte mare, e > 45 , deoarece traiectoria elicoidal
devine mai apropiat de cea rectilinie, viteza principal de achiere
as p
v
, se atribuie viteza
s
v ,
i deci micarea de deplasare axial a sculei va fi micarea principal. n concluzie, micarea
principal se efectueaz cu viteza principal de achiere
as p
v
i ea este o micare simpl de
rotaie, n cazul generrii suprafeelor reale prin procedeele de strunjire, burghiere alezare,
frezare, broare circular i rectificare, sau o micare simpl de translaie rectilinie, la
generarea prin procedeele de rabotare, mortezare i broare rectilinie.
Expresiile analitice ale vitezei principale de achiere sunt urmtoarele:
a) pentru micarea de rotaie
| min /
1000
2
m
n R
v
M M
as p
=
t
( 3.4)
n care R
M
reprezint raza punctului generator pe traiectoria micrii principale, n mm;
2R
M
- lungimea traiectoriei micrii principale, la un ciclu cinematic , n mm;
n
M
- frecvena de repetare a traiectori ei micrii principale, n rot/min.
n mod frecvent, se folosete relaia:
| min /
1000
m
n d
v
as
as p
t
=
(3.5)
n care d este diametrul piesei sau al sculei, n mm; n
as
- turaia de achiere a piesei sau
sculei, n rot/min.
Bazele prelucrrilor prin achiere pe maini- unelte
- 60 -
b) pentru micarea rectilinie
| min /
1000
1
m
n l
K
K
v
as
as p
+
=
(3.6)
n care
a
i
v
v
K = reprezint raportul dintre viteza n cursa de napoiere, v
i
i v
a
n
cursa activ, n care se produce achierea (
as a
v v = );
l -lungimea traiectoriei micrii principale la un ciclu cinematic n mm;
n
as
(n
m
) - frecvena de repetare dubl a traiectoriei micrii principale, n curse
duble/min. (c.d./min).
La rabotare i mortezare, K > 1, iar micarea principal este rectilinie cu caracter alternativ.
Raportul K poate fi constant sau variabil, n funcie de mecanismul care realizeaz micarea
rectilinie.
Micarea principal rectilinie poate avea i un caracter continuu, aa cum se realizeaz
la broarea cu aciune continu sau la generarea pe ferstraiele cu band. n aceste cazuri K =
1, iar expresia (3.6) a vitezei principale de achiere, v
a
, devine:
1000
'
1000
2
as as
as p
n l n l
v = =
, (3.7)
n care n
a
= 2n
a
reprezint frecvena de repetare simpl a traiectoriei micrii principale, n
curse simple / min (c.s./min).
n fine, micarea principal rectilinie se poate efectua discontinuu, ntr-un singur ciclu
cinematic, ca n cazul brorii rectilinii. De regul aici, mecanismul folosit este un cilindru-
piston, aa nct viteza, v
a
, se determin cu relaii de calcul specifice acestui mecanism.
3.1.1.3 Micrile complementare sau de avans
Pentru efectuarea procesului de achiere, care are ca scop generarea suprafeelor, pe
lng micarea principal mai este necesar participarea i a altor micri, denumite
complementare sau de avans. Acestea sunt: 1. micarea de avans de generare; 2. micarea de
avans de reglare.
1. Micarea de avans de generare. n cazul general al generrii suprafeelor,
generatoarea G se realizeaz pe cale cinematic, ca traiectorie a unei micri de poziionare
repetat, efectuat de elementul generator generatoarea elementar G
E
, n lungul
generatoarei teoretice G, cu viteza v
g
, ca n figura3.1.
n cazurile particulare ale frezrii, fig 3.4, i rectificrii, fig 3.5, aceast micare de
poziionare repetat este efectuat de directoarea elementar D
E
pentru realizarea cinematic a
directoarei teoretice D.
Maini- unelte si prelucrri prin achiere
- 61 -
Poziionarea elementului generator, indiferent care este acesta, G
E
sau D
E
, se
realizeaz pe distane constante de poziionare, denumite avansuri de generare (s
g
dup
generatoare sau s
d
dup directoarea9, care se repet la fiecare ciclu cinematic de achiere,
figura 3.7.
Micarea de poziionare repetat, ciclic, a generatoarei elementare G
E
n lungul
generatoarei teoretice G sau a directoarei elementare D
E
n lungul directoarei teoretice D este
denumit micare de avans de generare.
Micarea de avans de generare,( n cazul general, poate rezulta din compunerea unui
anumit numr de micri simple, de rotaie sau de translaie, fig. 3.8), a crei traiectorie
rezultant, ce constituie traiectoria micrii de avans, va fi traiectoria generatoarei D (la
frezare i rectificare).
Fig. 3.8.
Fig. 3.7.
Bazele prelucrrilor prin achiere pe maini- unelte
- 62 -
Rezult c micarea de avans de generare cea mai simpl, poate fi o micare rectilinie
obinut cu mecanismul sanie-ghidaj (cea mai frecvent) sau o micare circular obinut cu
mecanismul fus-lagr.
De asemenea, la generarea unei suprafee reale, este denumit micare de avans de
generare numai acea micare care, avnd scopul amintit (de poziionare ciclic a elementului
generator), se efectueaz exclusiv n timpul generrii suprafeei n cauz.
Micarea de avans de generare, n funcie de caz, se folosete fie pentru a transporta
periodic scula i micarea principal n faa unui nou strat de achiere, dup fiecare ciclu al
micrii principale, cu scopul de arepeta procesul de achiere n straturile succesive ale
adaosului de prelucrare, fie pentru ca mpreun sau nu cu micarea principal s duc la
realizarea unor traiectorii complexe(plane sau strmbe) pentru curbele generatoare sau
directoare, crend astfel posibilitatea generrii unor suprafee de complexitate ridicat.
Din punct de vedere al continuitii deplasrii, micarea de avans de generare poate fii
de mai multe feluri:
-micarea de avans continu, la strunjire, fig.3.8,frezare, fig.3.9 etc.;
Fig. 3.9.
Maini- unelte si prelucrri prin achiere
- 63 -
- micarea de avans continu alternativ, ca la rectificare, fig.3.10;
- micarea de avans intermitent, ca la rabotare, fig.3.11, mortezare etc.
Fig.3.10. Fig.3.11.
n funcie de direcia de deplasare, micarea de avans poate fi:
-longitudinal sau axial, fig.3.12;
-transversal sau radial, fig.3.13;
-circular, fig.3.14.
- tangenial, fig.3.15;
Fig. 3.13. Fig. 3.14.
Fig. 3.12
Bazele prelucrrilor prin achiere pe maini- unelte
- 64 -
Viteza cu care se efectueaz micarea de avans se numete vitez de avans. Aceast
vitez este tangent la traiectoria generatoare G, fig.3.7, a, i reprezint viteza elementului
generator n lungul generatoarei teoretice G, sau, n cazul frezrii i rectificrii, n lungul
directoarei D, fig.3.7, b, fiind notat cu
s
v .
Analitic viteza de avans se exprim prin relaia:
s
s
T
s
v = , (3.8)
n care s reprezint avansul, n mm, fie el dup generatoarea G, sau dup directoarea D;
T
s
timpul n care se produce repoziionarea elementului generator pe distana
avansului.
Mrimea timpului de poziionare, T
s
, variaz de la un procedeu de generare la altul, n
limitele:
0
cc s
T T s s ,
n care T
cc
reprezint timpul ciclului cinematic de achiere.
Valoarea minim a timpului de avans, T
s
= 0, se obine la broare, filetare cu tarozi sau
filiere etc., la care, datorit construciei sculelor, pozionarea este realizat implicit prin
supranlarea muchiilor achietoare, iar valoarea maxim a timpului de avans, atunci cnd T
s
= T
cc
.
Fig. 3.15.
Maini- unelte si prelucrri prin achiere
- 65 -
Reinnd aceste limite pentru timpul T
s
, cu relaia (3.8) se pot determina limitele
mrimii vitezei de avans, astfel :
.
0
max .
min .
min .
max .
cc s
s
s
s
T
s
T
s
v
s
sT
s
v
= =
= =
Deci, viteza de avans poate avea ca mrime, orice valoare cuprins ntre limitele de
mai sus, adic:
s s
s s
v v
min .
n timpul poziionrii, viteza de avans poate fi variabil sau poate fi constant, fr a
influena ns forma suprafeei reale generate, ci doar calitatea ei.
Atunci cnd micarea de avans este continu, aa cum se ntmpl la strunjire, frezare,
burghiere, alezare etc., viteza de avans care rezult este constant ca mrime i sens, i se
calculeaz cu relaia:
| min / . mm n s v
s
= (3.9)
n care s reprezint avansul n mm/rot;
n turaia sculei sau piesei n rot/min.
La aceste procedee de prelucrare rezult c viteza de avans depinde de valoarea
avansului i de turaia pnzei sau a sculei, turaie care se stabilete pe baza vitezei micrii
principale de achiere.
Dac micarea de avans se realizeaz cu intermiten ca la rabotare, mortezare etc.,
viteza de avans variaz n timpul de poziionare T
s
, crescnd de la 0 la un maxim, v
s
. max
, i
apoi revenind la 0. n acest caz poziionarea se efectueaz n afara fazei de achiere, dar legat
de aceasta. Rezult c pentru procedeele de prelucrare amintite (rabotare, mortezare etc.),
viteza de avans nu depinde de procesul tehnologic de achiere, adic de avans, ci exclusiv de
tipul mecanismelor ce alctuiesc lanul cinematic de avans, prin intermediul cruia se
realizeaz poziionarea elementului generator.
2. Micarea de avans de reglare. Prin micare de avans de reglare se nelege acea
micare care se folosete fie pentru reglarea sau poziionarea sculei odat pentru totdeauna la
Bazele prelucrrilor prin achiere pe maini- unelte
- 66 -
nceputul procesului de generare, fie pentru reglarea periodic a sculei la cote succesive de
prelucrare, dup fiecare trecere, adic pentru darea adncimii de achiere necesare, fig.3.10.
Mrimea deplasrii periodice realizate dup fiecare trecere se numete avans de
adncime t i se msoar n mm.
3.1.2.Analiza micrii de generare
Din cele expuse pn acum, a reieit c, micarea efectiv de achiere se obine din
compunerea tuturor micrilor simple, de translaie i de rotaie, care au loc simultan ntre
pies i scul i care sunt furnizate de ctre mecanismele sanie ghidaj i fus lagr, ce intr
n structura mainilor unelte. De asemenea, s-a vzut c aceast micare este definit ca
direcie, sens i vitez prin vectorul v
e.a
al vitezei ei la un moment dat.
Cunoaterea direciei instantanee a vectorului v
e.a
a micrii efective de achiere i a
traiectoriei acestei micri, prezint importan, pe de o parte pentru determinarea geometriei
i a profilului sculelor achietoare, iar pe de alt parte pentru stabilirea formei achiei i a
suprafeei achiate. Dar, att direcia vectorului v
e.a
ntr-un punct dat al tiului, ct i forma
traiectoriei sunt determinate de mrimea relativ a vitezelor tuturor micrilor, care, aci onnd
simultan, intr n compunerea vitezei efective de achiere.
n consecin, analiza micrii de achiere presupune luarea n considerare a tuturor
componentelor acestei micri, pentru care ns este necesar stabilirea n prealabil a unui
sistem de referin convenabil.
Deoarece n procesul de achiere micrile care particip la generarea suprafeelor sunt
furnizate de ctre mecanisme de tip sanie ghidaj i fus lagr, ce intr n structura mainilor
unelte, pentru studierea analitic a micrii efective de achiere este necesar folosirea unui
sistem de referin legat de aceste mecanisme.
Maini- unelte si prelucrri prin achiere
- 67 -
Cum la majoritatea mainilor unelte, ghidajele micrii de translaie sunt n general
ortogonale ntre ele, iar axele micrilor de rotaie sunt paralele cu unul dintre ghidaje, rezult
c cel mai indicat sistem de referin spaial, necesar pentru definirea direciei i a sensului
micrii de achiere i a componentelor ei, este un sistem de trei axe coordonate fig.3.16,
paralele tocmai cu direciile acestor organe ale mainii unelte. Astfel, axele acestui sistem
vor fi paralele chiar cu micrile de translaie rectilinii, iar unul dintre planele lui va fi paralel
cu planul micrii de rotaie.
Fig. 3.16.
Fiind legat de ghidajele i lagrele mainii, cu orientri constante, bine determinate,
sistemul de referin astfel ales devine un sistem univoc determinat pentru fiecare main
unealt. i deoarece poziia lui eate legat de direciile cuplelor cinematice inferioare ale
mainii unelte, el a fost denumit sistem de referin cinematic.
Corespunztor procedeului de prelucrare prin achiere, axa OX se convine s se aleag
paralel cu axa de rotaie a piesei sau a sculei achietoare, fiind n acelai timp paralel i cu
generatoarea teoretic a suprafeei prelucrate.
Cnd micarea principal este rectilinie, ca n cazul rabotrii, mortezrii .a. centrul
de rotaie se consider c se gsete la infinit.
Axa OZ se alege paralel cu direcia i sensul vectorului micrii principale, iar axa
OY paralel cu una din micrile de avans.
Bazele prelucrrilor prin achiere pe maini- unelte
- 68 -
Planul format de axele OX i OY se numete plan de baz cinematic (Pb), fig. 3.17.
El este determinat ca un plan paralel cu dou dintre micrile de translaie complementare s
x
i s
y
ale sculei i care conine axa de rotaie OX.
Fig. 3.17.
Sistemul de referin OXYZ fiind ales ortogonal, axa OY coninut n planul de baz
definit ca mai nainte va fi normal pe axa OX, iar axa OZ va fi evident normal pe cele dou
axe i pe planul de baz XOY. Se convine ca sensul pozitiv al axei OZ s coincid cu sensul
micrii sculei n raport cu piesa considerat fr micare n timpul lucrului, iar sensurile
pozitive ale axelor OX i OY se vor lua astfel ca, mpreun cu OZ, s formeze un triedru
pozitiv sau drept ca n fig.3.16.
Pentru procedeul de prelucrare prin strunjire sistemul de referin cinematic este cel
artat n fig. 3.18.
Axa OX este paralel cu axa micrii de rotaie principal a piesei n
a
i paralel cu
micarea de avans longitudinal s
x
sau
sx
v , prin urmare, paralel cu generatoarea teoretic.
Axa OZ are sensul i direcia vectorului micrii principale dac piesa ar sta pe loc i
s-ar roti cuitul.
Axa OY are direcia micrii de avans transversal s
y
sau
sy
v , cu sensul de a forma un
triedru triortogonal orientat drept, aa cum rezult i din fig.3.16. Planul de baz (Pb) conine
cele dou axe OX i OY.
Maini- unelte si prelucrri prin achiere
- 69 -
n cazul mainilor de frezat cu ax orizontal, la care prelucrarea se realizeaz cu
periferia frezei, sistemul de referin cinematic arat ca n figura 3.19.
Fig. 3.18.
Axa OX este paralel cu axa de rotaie a frezei, axa OY are direcia micrii de avans
vertical s
y
sau
sy
v , iar axa OZ este perpendicular pe celelalte dou, formnd sistemul
triortogonal drept cu sensul vitezei principale prin achiere.
De remarcat este faptul c axa OZ se suprapune i peste micarea de avans
longitudinal s
z
sau
sz
v .
Bazele prelucrrilor prin achiere pe maini- unelte
- 70 -
Fig. 3.19.
Fig. 3.20.
Pentru aceeai grup de maini unelte, schimbnd scula achietoare cu o frez
cilindro frontal, care are axul vertical, fig. 3.20, se schimb i poziia sistemului de
referin cinematic, dar pstreaz caracteristicile generale artate mai sus. Axa OX este
paralel cu axa de rotaie a sculei; axa OZ are sensul i direcia vectorului
as p
v
a micrii
principale, iar axa OY formeaz cu celelalte dou , sistemul triortogonal drept. Din fig. 3.20
Maini- unelte si prelucrri prin achiere
- 71 -
rezult i direciile micrilor de avans pentru acest procedeu de frezare, iar planul de baz,
nedesenat n figur, conine cele dou axe: OX i OY.
n cazul mainilor de gurit, axa OX este axa de rotaie a burghiului i este singura ax
care poate fi nominalizat direct, deoarece micarea de avans s
x
sau
sx
v are direcia paralel cu
axa de rotaie i nu determin un plan mpreun cu aceasta. Din acest motiv, direciile i
sensul axelor OY i OZ se aleg relativ arbitrar cu condiia s formeze mpreun triedul
articulat drept.
Fig. 3.21.
Pentru mainile unelte cu dou cuple cinematice fus lagr la care att piesa, ct i
scula au micri de rotaie simultane, cum este cazul mainilor de frezat cu mas rotativ,
fig.3.21, a mainilor de frezat fi lete sau a mainilor de mortezat sau frezat roi dinate etc.,
prin definiie se constituie dou sisteme de referin cinematice: unul al piesei i unul al sculei
rotative. ns, spre deosebire de cazul strungului cu mai multe axe, cele dou sisteme fus
lagr nu pot fi considerate separat, deoarece ntre ele au loc anumite micri relative de avans
Bazele prelucrrilor prin achiere pe maini- unelte
- 72 -
i deoarece micrile produse de fiecare dintre ele se nsumeaz dnd micarea rezultant de
achiere.
Principial, direcia micrii efective de achiere
as ef
v
poate fi definit n raport cu
oricare din cele dou sisteme, dar este mai indicat s fie definit n raport cu acela care are un
caracter mai invariabil. Sistemul invariabil este acela care, fiind legat de direciile fixe ale
mainii, adic de ghidajele batiului, poate constitui sistemul de referin chiar i pentru
determinarea direciilor deplasrilor relative dintre cele dou axe de rotaie, respectiv dintre
cele dou sisteme de referin. Astfel, sistemul de referin cinematic al mainii OXYZ,
fig.3.21, devine un sistem de referin cinematic director, iar acela al sculei O
1
X
1
Y
1
Z
1
devine
un sistem de referin cinematic auxiliar sau complementar.
Fig. 3.22.
Maini- unelte si prelucrri prin achiere
- 73 -
Fig. 3.23.
n cazul mainilorunelte cu mai multe scule achietoare cum este cazul strungurilor
automate monoax, se constituie sisteme de referin cinematice pentru fiecare scul
achietoare n parte, fig.3.22, iar pentru mainileunelte cu mai multe axe principale, ca:
maini de alezat i frezat , automate multiax, mainiunelte combinate etc., se vor constitui
sisteme de referin cinematice pentru fiecare ax principal n parte, fig 3.23.
3.2.Parametrii procesului de achiere i ai sculelor achietoare
Prin parametrii procesului de achiere se nelege suma factorilor care particip i
determin modul de desfurare i implicit rezultatele prelucrrii prin achiere. Este vorba de
elementele sistemului tehnologic folosit la realizarea procesului de achiere, fig.3.24, n
componena creia intr maina-unealt, materialul de prelucrat i scula achietoare, precum
i de regimul de achiere, forma i elementele achiei, mediul n care se desfoar
prelucrarea etc.
Bazele prelucrrilor prin achiere pe maini- unelte
- 74 -
Fig.3.24
3.2.1. Definirea procesului de achiere i evidenierea factorilor de care
acesta depinde
Procesul de achiere const n ndeprtarea, sub form de achii, a unui strat de
material, numit adaos de prelucrare, de pe orice pies, brut sau semifinit n scopul obinerii
unei suprafee a piesei de o anumit form, dimensiune i rugozitate.
Ansamblul fenomenelor fizice prin care se produce transformarea adaosului de
prelucrare n achii, detaarea acestora i generarea suprafeei prelucrate se numete proces
de achiere.
Procesul de achiere se realizeaz pe maini-unelte, cu ajutorul sculelor achietoare, ca
urmare a imprimrii unei micri relative ntre scul i pies, micri efectuate pe traiectorii
determinate de cinematica generrii suprafeelor i cu viteze condiionate att de cinematica
generrii ct i de modul de formare i evacuare a achiilor.
Rezult astfel c la baza procesului de achiere st aciunea tiului sculei achietoare,
fig.3.25, asupra stratului de material ce urmeaz a fi ndeprtat sub form de achie. Pentru
aceasta ns, forma geometric a tiului sculei, care vine n contact cu materialul piesei,
trebuie s fie astfel stabilit nct s permit formarea achiei n condiii ct mai bune,
Maini- unelte si prelucrri prin achiere
- 75 -
nelegnd prin aceasta un consum minim de energie la un debit maxim de achii i cu o uzur
ct mai mic, concomitent cu obinerea unei calit i corespunztoare a suprafeei prelucrate.
Fig.3.25
Principalii parametrii geometrici care definesc i totodat determin condiiile de
formare i evacuare a achiilor sunt:
- unghiul de achiere ;
- unghiul de degajare ;
- unghiul de aezare ;
- unghiul de ascuire .
ntre aceti parametrii exist relaiile evidente:
+ + = 90
0
+ = ;
+ = 90
0
.
ndeprtarea adaosului de prelucrare are loc n condiii avantajoase atunci cnd partea
activ a sculei se execut sub form de pan, deci unghiul de achiere
o
90 s , iar faa de
degajare primete o astfel de form nct permite conducerea i evacuarea uoar a achiei.
Achierea, ca procedeu de obinere a pieselor, cu calitile lor funcionale cerute de
condiiile de utilizare, presupune:
Bazele prelucrrilor prin achiere pe maini- unelte
- 76 -
- existena unei maini-unelte, dotate cu dispozitiv corespunztor de fixare a piesei-
semifabricat, pe care urmeaz s se desfoare procesul de achiere;
- folosirea unei scule achietoare, executate dintr-un material adecvat i cu o geometrie
corespunztoare;
- prezena piesei supuse prelucrrii, care poate fi executat din materiale cu proprieti
mecano-tehnologice diferite;
- utilizarea unui regim de achiere adecvat;
- folosirea unor fluide de achiere corespunztoare.
Indiferent de procedeul de prelucrare, fiecare din aceste elemente particip i
influeneaz ntr-o msur mai mare sau mai mic, ntr-un sens sau altul, modul de
desfurare al procesului de achiere. Factorul determinant l constituie materialul supus
prelucrrii care prin natura, forma i dimensiunile sale, reclam tiuri achietoare
corespunztor modelate, executate din materiale cu capaciti achietoare ct mai ridicate,
regimuri de achiere adecvate precum i lichide care s favorizeze prelucrarea , iar n funcie
de felul suprafeei ce urmeaz a fi prelucrat, rezult necesitatea utilizrii unei maini-unelte
capabile s furnizeze tipurile de micri solicitate de cinematica generrii suprafeei i la
valori corespunztoare regimului de achiere stabilit, n limitele unei rigiditi impuse.
Cunoscnd modul de influenare al procesului de achiere de ctre fiecare din
elementele enunate, rezult posibilitatea stabilirii pentru fiecare caz n parte a celor mai bune
condiii de desfurare a achierii. Acest fapt este ns posibil numai pe baza cunoaterii
mecanismului de formare a achiei, a modului de comportare a materialelor n procesul de
achiere, a influenei regimului de achiere i a geometriei sculei asupra formrii achiei etc.
3.2.2. Rolul mainii-unelte n procesul de achiere
Prin definiie, mainile care asigur prelucrarea diferitelor tipuri de piese, realiznd
generarea suprafeelor prin procedeul achierii, se numesc maini-unelte. Rezult astfel c
rolul mainii-unelte n procesul de achiere este, pe de o parte cel de suport al prelucrrii, iar
pe de alt parte de furnizor al micrilor necesare generrii suprafeelor i acestea la valori
corespunztoare unei desfurri economice a procesului.
ntr-adevr, realizarea procesului de prelucrare prin achiere, impune mainii-unelte,
n mod obligatoriu, efectuarea simultan a dou procese interdependente i anume: procesul
de generare a suprafeelor i procesul de achiere. n plus de acestea dou, fr de care
prelucrarea prin achiere nu poate avea loc, mai sunt necesare i efectuarea unor procese
Maini- unelte si prelucrri prin achiere
- 77 -
suplimentare (auxiliare) legate de utilizarea i manevrarea complet i sigur a primelor dou.
Este vorba de realizarea micrilor auxiliare care nu particip la generare, dar care le
condiioneaz , de fixarea piesei i a sculei n vederea efecturii prelucrrii, de reglarea i
aducerea n poziia de nceput a prelucrrii, de acionare i comand etc.
n consecin, rolul mainii-unelte este acela de a face ca, n funcie de natura
materialului supus prelucrrii, de dimensiunile piesei, a formei suprafeei ce urmeaz a fi
generat, a felului prelucrrii (de degroare sau finisare), a modului de generare i a tipului
sculei utilizate, s permit, pe baza parametrilor regimului de achiere adoptai, desfurarea
procesului de achiere n condiii normale.
Pentru aceasta maina-unealt trebuie s dispun de o gam corespunztoare de valori
pentru micarea principal de achiere i de posibilitatea reglrii continue a acesteia, de o
plaj nsemnat de valori pentru avansul de lucru, de o putere i rigiditate corespunztoare,
astfel nct s fie posibil optimizarea regimului de achiere i, implicit, realizarea unei nalte
productiviti a prelucrrii n condiiile unei precizii de lucru ridicate etc. De asemenea,
maina-unealt trebuie s permit realizarea unei economiciti a prelucrrii, o deservire
uoar i sigur, durabilitate i siguran n funcionare, comand simpl i uoar, evacuare
sigur a achiilor etc.
3.2.3. Dependena procesului de achiere de natura materialului prelucrat
n ansamblul sistemului tehnologic main-dispozitiv-pies-scul, folosit la
prelucrarea prin achiere, semifabricatul reprezint elementul care sufer modificri ale
formei i dimensiunilor sale, prin ndeprtarea adaosului de prelucrare sub form de achii.
Aceasta nseamn c la baza succesului prelucrrii st modul de comportare a materialului n
timpul achierii, pus n eviden prin lucrul mecanic consumat n procesul de achiere, prin
felul n care se formeaz achia, prin intensitatea procesului de uzare a sculei, calitatea
suprafeei rezultate n urma prelucrrii etc.
La rndul lor, materialele supuse prelucrrii se difereniaz unele de altele prin natura
i proprietile fizico-mecanice, prin compoziie i structur, prin proprietile chimico-
metalurgice etc. Toate aceste elemente fac ca fiecare material achiat s se comporte ntr-un
anumit fel, n funcie de elementele ce l caracterizeaz i n funcie de care trebuie stabilii
ceilali parametrii ai procesului de achiere, n aa fel nct prelucrarea propriuzis s se
desfoare n condiii ct mai avantajoase.
Bazele prelucrrilor prin achiere pe maini- unelte
- 78 -
Avnd n vedere c n prezent sunt supuse prelucrrii prin achiere practic toate
materialele, feroase i neferoase elaborate, materiale ce se caracterizeaz prin proprieti
mecanico-tehnologice deosebit de variate i c pentru generarea suprafeelor se folosesc
diverse procedee de prelucrare, rezult c i procesul de achiere se va desfura, n fiecare
caz, n cu totul alte condiii; odat energia consumat pentru formarea unui element de
achiere va fi mai mare, iar alt dat mai mic. ntr-un anumit caz geometria optim a sculei
va avea o anumit valoare, iar n alt caz o alt valoare. Prelucrarea unui material se va efectua
cu un anumit regim de achiere, iar a altuia cu un alt regim, tot aa cum scula achietoare se
va executa ntr-o anumit situaie din oel rapid, iar n alt situaie din carburi metalice etc.
Toate aceste elemente, diferite de la un caz de prelucrare la altul, sunt determinate de
modul concret de comportare al materialului n procesul de achiere, fapt ce atest influena
hotrtoare a naturii semifabricatului asupra modului de desfurare a procesului de achiere.
Sintetic, modul de comportare a materialului n procesul de achiere se exprim prin
noiunea de prelucrabilitate care constituie una din caracteristicile de baz ale celui de-al
treilea element al sistemului tehnologic folosit la prelucrarea prin achiere care este piesa. De
gradul de prelucrabilitate al materialului supus prelucrrii depinde modul de formare al
achiei i ca atare i ceilali parametrii ai procesului de achiere.
3.2.4 Influena lichidelor de rcire-ungere
Dei lichidele de rcire-ungere nu pot fi considerate un element distinct al sistemului
tehnologic al prelucrrii prin achiere ele reprezint totui un factor important al procesului de
achiere, deoarece prin efectele pe care le produc, influeneaz n mare msur modul de
desfurare a achierii. Astfel, este de reinut faptul c, prin folosi rea lichidelor de rcire-
ungere la achiere se obin o seam de fenomene, dintre care cale mai importamte sunt:
- efectul de rcire care const n evacuarea forat a cldurii produse n timpul
achierii, de la scul, achie i pies;
- efectul de lubrificare, pus n eviden prin reducerea frecrii dintre achie i scul,
reducndu-se n acest fel i cantitatea de cldur generat n urma acestei frecri;
- efectul de achiere prin care se obine nbuntirea modului de formare,
desprindere i evacuare a achiei, se realizeaz protecia anticoroziv a elementelor
componente ale sistemului tehnologic etc.
n afar de aceste efecte, lichidele de rcire-ungere mai sunt utile procesului de
achiere i prin contribuia lor la reducerea forelor i implicit puterii consumate n procesul
de achiere, la nbuntirea calitii suprafeei prelucrate etc.
Maini- unelte si prelucrri prin achiere
- 79 -
n general, se poate aprecia c toate efectele lichidelor de rcire-ungere au ca rezultat
mbuntirea economicitii procesului de achiere prin mrirea durabilitii sculei, motiv
pentru care n majoritatea cazurilor de prelucrare prin achiere folosirea lor devine obligatorie.
Efectul de rcire al lichidului folosit la achiere este influenat de o seam de factori,
dintre care cei mai muli sunt cunoscui. Astfel, pentru efectuarea unei rciri eficiente, lichidul
trebuie s aib o cldur masic i conductibilitate termic mare, o temperatur sczut i
posibilitatea realizrii unei suprafee mari de contact ntre lichidul de rcire, scul, achie i
semifabricat. Din acest punct de vedere aciunea cea mai mare o are apa, ceea ce face ca ea s
fie unul din agenii de rcire cei mai utilizai, fiind ns necesar s se ia msuri pentru
anularea efectului ei coroziv i mbuntairea proprietilor de lubrifiere.
n cealalt extrem, din punct de vedere al proprietilor ca agent de rcire, se afl
uleiul mineral care, neavnd capacitate ridicat de rcire, posed n schimb bune caliti de
lubrifiere. ntre cele dou extreme exist o serie ntreag de soluii intermediare, care combin
principalele avantaje ale celor dou lichide de baz. Dac n acestea se adaug i unele
substane capilar-active, pentru a obine i efectul de achiere, mai sus semnalat, rezult
variantele posibile de utilizat. Folosirea uneia sau alteia din soluiile posibile depinde ns de
condiiile concrete de achiere determinate de: procesul de prelucrare, tipul sculei, felul
operaiei, natura materialului achiat, calitatea suprafeei cerute etc.
3.2.5 Elementele caracteristice ale sculei achietoare, ca organ de
execuie a procesului de achiere
3.2.5.1. Definiia i rolul sculei achietoare n procesul de achiere
Prin scula achietoare se nelege orice unealt, de mn sau de main, cu ajutorul
creia se realizeaz ndeprtarea, sub form de achii, a unui strat de material de pe
suprafeele semifabricatelor supuse prelucrrii. n cazul sculelelor achietoare acionate
mecanic, acestea sunt ncorporate n sistemul tehnologic(MUDPS) care furnizeaz att
micrile ct i energia necesar desfurrii procesului de achiere.
n ansamblul sistemului tehnologic folosit la prelucrarea prin achiere scula
achietoare reprezint organul de execuie care, n micarea sa relativ fa de pies genereaz
o noua suprafa prin ndeprtarea adaosului de prelucrare sub form de achii. Spre deosebire
de alte organe de maini, scula achietoare este singurul organ care, prin reascuire i
recapt proprietile funcionale.
Marea varietate a pieselor ntlnite n industria constructoare de maini, condiiile
tehnice impuse acestora precum i necesitatea prelucrrii lor n condiii ct mai economice, au
Bazele prelucrrilor prin achiere pe maini- unelte
- 80 -
condus la creacrea diferitelor procedee de prelucrare prin achiere, iar ca o consecin a
cestora i a diversitii mari a formelor i dimensiunilor pieselor supuse prelucrrii, s-a
dezvoltat o mare varietate de scule achietoare ale cror tiuri au ns elemente comune; la
toate sculele ndeprtarea achiilor realizndu-se prin efectul de pan.
Indiferent de procedeul de prelucrare utilizat, scula achietoare este destinat s
ndeplineasc urmtoarele dou funcii de baz:
- s achieze un strat de material de o anumit grosime;
- s asigure generarea corespunztoare a suprafeelor, concomitent cu obinerea
dimensiunilor necesare piesei finite, precum i rugozitatea prescris a suprafeelor
prelucrare. Pentru aceasta este necesar ns ca scula achietoare s dispun de o
geometrie i de o form adecvat a tiului achietor, corespunztor procedeului de
generare stabilit i s fie executat dintr-un material care s imprime tiului
proprieti achietoare pe o durat de timp ct mai ndelungat.
3.2.5.2 Prile componente ale sculelor achietoare
n general, sculele achietoare se compun din urmtoarele pri principale, fig.3.26;
Fig.3.26
Maini- unelte si prelucrri prin achiere
- 81 -
1 partea activ, ce cuprinde tiul achietor, care particip nemijlocit n procesul de
achiere;
2 partea de calibrare, care execut netezirea suprafeei prelucrate i ghidarea sculei
n timpul achierii;
3 corpul sculei, care are rolul de a reuni ntr-un singur ansamblu, rezistent i rigid,
dinii i canalele pentru achii;
4 partea de fixare a sculei, destinat poziionrii corecte i fixrii sculei n maina-
unealt.
mpreun, primele dou pri ale sculei formeaz partea achietoare.
La unele scule partea activ i partea de calibrare sunt distincte, de exemplu la sculele
pentru prelucrarea gurilor sau filetelor (excepie fac doar frezele, fig. 3.27., i cuitele pentru
filetare), iar la altele partea de calibrare este greu de distins, de exemplu vrful i tiul
secundar la cuitele pentru strunjire sau retezare, fig.3.26.a. n cazul altor scule, ca de exemplu
pilele sau unele scule pentru danturare, partea activ i de calibrare se confund, respectiv
formeaz mpreun o singur parte.
Fig.3.27.
Bazele prelucrrilor prin achiere pe maini- unelte
- 82 -
Partea activ a sculei este format din unul sau mai multe tiuri adiacente (inclusiv
cele de calibrare) i suprafeele lor, numite fee ale sculei, fig.3.28, din rezerva pentru
reascuire precum i dintr-o serie de alte elemente care servesc la degajarea, conducerea i
ruperea achiilor. n afar de aceste elemente, care constituie de fapt partea achietoare, o
serie de scule mai sunt prevzute i cu elemente de ghidare a sculei n timpul prelucrrii.
Fig.3.28.
Cu toate acestea, partea achietoare a sculelor, indiferent de tipul i construcia lor,
este asemntoare cu cea a cuitului simplu, motiv pentru care definiiile rezultate pe baza
analizei ce se va efectua n continuare, pe acestea, devin valabile pentru toate tipurile de scule
achietoare. Analogia dintre partea achietoare a unui cuit i a altor scule (bar de alezat,
frez frontal i lamator) este ilustrat n fig.3.29.
Maini- unelte si prelucrri prin achiere
- 83 -
Partea de fixare a sculelor este format din elemente de fixare i din elemente de
bazare necesare la fabricarea, controlul i reascuirea sculei. Aceast parte are rolul de a
prelua i transmite prii active a sculei fora dezvoltat de maina-unealt achietoare sau de
mna omului. De exemplu, la un cuit, partea de fixare este corpul cu care acesta se fixeaz n
suportul port-scul, la burghie, alezoare i freze conice, fig. 3.28, este coada, iar la freze cu
alezaj, fig. 3.27, este alezajul, prevzut cu canal de pan prin intermediul creia freza se
monteaz n suportul port-scul.
3.2.5.3 Parametrii geometrici ai sculelor
Prin parametrii geometrici ai sculelor se neleg:
- unghiurile prii achietoare i anume: unghiul de degajare, unghiul de aezare, de
atac, de vrf, de nclinare a tiului, de achiere, de ascuire;
- forma feei de degajare i a celei de aezare;
- forma tiurilor i raza de racordare a vrfului;
- canalele de fragmentare i pragurile de conducere sau rupere a achiilor;
- faetele i parametrii seciunii rezistente a prii achietoare etc.
Elementele constitutive ale tiului sculei
Partea achietoare a sculelor, fig.3.30, este format dintr-un numr oarecare de
Fig.3.29.
Bazele prelucrrilor prin achiere pe maini- unelte
- 84 -
suprafee, numite fee ale sculei, astfel dispuse, nct, mpreun, dou cte dou definesc
tiurile sculei, iar la intersecia lor rezult muchiile achietoare.
Tiul sculei reprezint partea cea mai important a oricrei scule achietoare avnd
rolul de a detaa stratul de achiere sub form de achii. El este format dintr-un diedru solid,
cuprins ntre o fa de degajare i una de aezare.
Dup funcia pe care o ndeplinesc n procesul de achiere tiurile sculei se mpart n:
tiuri principale i tiuri secundare, fig.3.31.
Fig.3.31.
Fig.3.30.
Maini- unelte si prelucrri prin achiere
- 85 -
Tiul principal este acela care detaeaz achia pe latura ei dinspre adaosul de
prelucrare i deci se gsete pe partea n sensul cr eia se produce avansul de generare.
Tiul secundar este acela care detaeaz achia pe latura ei dinspre suprafaa
prelucrat: de forma i calitatea acestuia depinde netezimea suprafeei generate.
Un element important al tiului sculei este muchia acestuia, care rezult la intersecia
celor dou fee componente i care poate fi ascuit sau prevzut cu o raz de rotunjire r
n
,
fig.3.32.
Fig.3.32.
Muchia tiului este elementul care genereaz suprafaa prelucrat; n anumite cazuri
aceasta reprezint generatoarea materializat, iar n alte cazuri, generatoarea elementar.
Feele tiului, dup rolurile pe care le au, sunt de dou feluri: fee de degajare i fee
de aezare, fig.3.30.
Faa de degajare este acea suprafa a tiului care exercit fora de achiere asupra
stratului de prelucrat i pe care alunec achia detaat.
Faa de aezare este o suprafa a tiului aflat n contact cu suprafaa de achiere.
Aceasta poate fi: fa de aezare principal sau fa de aezare secundar.
n funcie de caz, feele tiului pot fi suprafee plane sau suprafee strmbe n spaiu.
n mod corespunztor, muchiile tiurilor rezult sub form de linii drepte sau curbe(n plan
sau n spaiu).
Bazele prelucrrilor prin achiere pe maini- unelte
- 86 -
Vrful sculei este punctul de intersecie a dou muchii achietoare nvecinate. El poate
fi ascuit, fig.3.33.a, sau racordat cu o poriune de curb, de raz r
, numit raz de rotunjire a
vrfului, fig.3.33.b.
Fig.3.33
n unele cazuri, pe faa de degajare i pe faa de aezare principal se practic faete
urmrindu-se diferite scopuri. Astfel, faeta b
, fig.3.34, printre altele are rolul de a micora
zona de contact dintre achie i faa de degajare i de a ntri tiul. n cazul sculelor armate
cu plcue din carburi metalice, prin aceste faete se urmrete transformarea solicitrii de
ncovoiere, la care aceste plcue se comport nesatisfctor n solicitare de compresiune.
Fig.3.34.
Faeta b
poatea avea rolul de amortizor de vibraii, de suprafa de control la ascuire,
de control dimensional la freze cilindrice, alezoare sau de ghidare, cum este cazul la burghie,
alezoare etc.
Maini- unelte si prelucrri prin achiere
- 87 -
Fig.3.35.
Un dinte al sculei n unele cazuri, poate avea dou sau chiar mai multe tiuri. Astfel,
la un cuit de retezat exist un ti principal i dou tiuri secundare, iar la dintele unui
burghiu, fig.3.35, exist un ti principal, un ti secundar al faetei i un ti transversal. Prin
urmare, i numrul de vrfuri n al dintelui sculei poate fi mai mare ca1(unu) , fiind dat de
relaia: n = N-1 n care N este numrul de tiuri de pe dintele sculei.
Bazele prelucrrilor prin achiere pe maini- unelte
- 88 -
ntrebri de verificare a cunotinelor:
1.Cum se definete micarea efectiv de achiere?
2.Care este micarea principal n cazul prelucrrii prin rectificare?
3.Precizai micrile complementare de avans.
4.Ce este planul de baz cinematic?
5.Definii, cu ajutorul unei schie, sistemul de referin cinematic.
6.Care sunt elementele sistemului tehnologic al prelucrrii prin achiere?
7.Realizai schia reprezentnd parametrii geometrici ai achierii (,,,).
8.Indicai rolul mainii-unelte n procesul de achiere.
9.Analizai dependena procesului de achiere de natura materialului prelucrat.
10.Care este influena lichidelor de rcire-ungere asupra prelucrrilor prin achiere?
11.Definii scula achietoare i rolul acesteia.
12.Care sunt prile componente ale sculelor achietoare.
13.Din ce se compune partea activ (achietoare) a sculelor?
14.Indicai, cu ajutorul unei schie, tiurile cuitului de strung.
Maini- unelte si prelucrri prin achiere
- 89 -
CAPITOLUL IV
Obiectivele capitolului:
Definirea fiecrui procedeu tehnologic de prelucrare prin achiere
Prezentarea principiului de lucru aferent procedeului de prelucrare
Insuirea cunotiinelor privind parametrii de achiere specifici
Precizarea unor relaii de legtur dintre parametrii de lucru / prelucrare
Prezentarea posibilitilor de reglare ale sistemului tehnologic
Evidenierea tipurilor de maini-unelte care asigur realizarea diverselor procedee de
prelucrare
nsuirea cunotiinelor referitoare la tipuri de suprafee ce pot fi obinute prin achiere
PROCEDEE DE PRELUCRARE PRIN ACHIERE
4.1.Strunjirea
4.1.1.Definire i principiul de lucru
Strunjirea reprezint procedeul tehnologic la care micarea principal este de rotaie a
piesei iar micrile de avans i de reglare (rectilinii) sunt executate de scula achietoare ce
poart numele de cuit de strung.
Principiul de lucru al acestui procedeu este prezentat n figura 4.1.
Fig. 4.1.
Procedee de prelucrare prin achiere
- 90 -
Utiliznd elementele din figura 4.1 se pot vedea parametrii seciunii stratului de
achiere. care sunt:
- a [mm] - grosimea stratului de achiere;
- b [mm] - limea stratului de achiere.
Sistemul tehnologic ce realizeaz micrile necesare achierii se numete strung, care, n
funcie de destinaie este universal, semiautomat, automat, carusel, cu destinaie special (ex:
strung copier, de detalonat, etc.). cu comand numeric etc.
4.1.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic
n cazul strunjirii parametrii regimului de achiere sunt
- viteza de aehiere "v" [m/min];
- avansul de achiere "s" [mm/rot];
- adncimea de achiere "t" [mm].
Parametrii cinematici de reglaj ai sistemului
tehnologic sunt
- turaia "n" [rot/min];
- avansul de achiere "s" [mm/rot];
- adncimea de achiere ["t" mm].
Se poate face observaia c singura diferen
dintre parametrii regimului de achiere i parametrii
cinematici de reglaj ai sistemului tehnologic o
reprezint viteza de achiere i turaia.
Fig. 4.2.
Legtura dintre aceti parametrii este dat de relaia:
1000
n d
v
=
t
[m/min] (4.1) unde, d [mm] - diametrul piesei de
prelucrat.
Avansul de achiere, n funcie de direcia axei micrii principale de achiere poate
fi longitudinal (fig. 4.1) sau transversal (fig. 4.2).
Legtura dintre parametrii regimului de achiere i parametrii seciunii stratului de
achiere, folosind i figura 2.22, este dat de relaiile (4.2) i (4.3).
; sin = s a (4.2.)
; sin
t
b = (4.3.)
Maini- unelte si prelucrri prin achiere
- 91 -
4.1.3 Tipuri de suprafee ce pot fi obinute prin strunjire
Suprafeele ce pot fi obinute prin strunjire sunt situate att la exterior ct i la interior. Se
pot obine suprafee cilindrice (fig. 4.1), suprafee plane (fig. 4.2), suprafee conice, suprafee
elicoidale, suprafee poligonale, suprafee ovale i ovoidale, suprafee profilate, detalonri,
crestri, degajri, canale, retezri i chiar suprafee cu generatoare neanalitic.
Cerina obiectiv, comun tuturor suprafeelor, .este existena unei axe de rotaie i
posibilitatea prinderii sigure, pe maina-unealt, a semifabricatului.
Metodele, din punct de vedere al generrii suprafeelor, prin care se pot obine suprafeele
enunate mai sus, sunt:
directoare obinut pe cale cinematic, ca traiectorie a unui punct;
generatoare: - materializat pe tiul achietor;
- obinut pe cale cinematic:
- ca traiectorie a unui punct;
- ca nfuratoare a poziiilor unei curbe n micare;
- prin rulare;
- prin programare.
4.2 Rabotarea
4.2.1. Definire i principiul de lucru
Rabotarea constituie procedeul de generare a suprafeelor prin achiere la care micarea
principal este rectilinie alternativ, executat n plan orizontal, fie de pies, fie de scula
aschietoare care este denumit cuit de rabotat. Avansul, executat la captul unei curse duble,
este tot rectiliniu dar intermitent i poate fi efectuat att n plan orizontal ct i n plan vertical.
Principiul de lucru al procedeului ct i parametrii stratului d e achiere sunt artai n fig.4.3.
Sistemul tehnologic ce realizeaz micrile necesare rabotrii se numete fie rabotez
(micarea principal este efectuat de ctre masa mainii-unelte), fie eping (micarea principal
este efectuat de ctre scula achietoare care este fixat pe capul mainii-unelte).
Fig. 4.3.
Procedee de prelucrare prin achiere
- 92 -
4.2.2. Regimul de achiere i parametrii de reglaj ai sistemului
tehnologic
Regimul de achiere, n acest ca,. este caracterizat de
- viteza de achiere "v" [m/min];
- avansul de achiere
:
's" [mm/cd];
- adncimea de achiere "t" [mm].
Parametrii cinematici de reglaj ai sistemului tehnologic sunt:
- numrul de curse duble "n
cd
curse duble (cd) / min];
- avansul de achiere "s [mm/cd];
- adncimea de achiere "t" [mm].
Legtura dintre viteza de achiere i numrul de curse duble este dat de relaia:
n
cd
=1000*v/2*l (4.4.)
unde, 1 [mm] - lungimea unei curse simple care este n funcie de lungimea piesei.
Legtura dintre parametrii regimului de achiere i parametrii seciunii stratului de
achiere, folosind i figura 4.3. este dat tot de relaiile (4 2) i (4. 3).
4.2.3 Tipuri de suprafee ce pot fi obinute prin rabotare
Suprafeele ce se obin prin rabotare sunt situate la exterior i mai rar la interior.
Astfel se pot prelucra:
- suprafee plane exterioare orizontale, verticale sau nclinate;
- canale de pan deschise exterioare i mai rar interioare;
- canale exterioare n form de T;
- caneluri exterioare;
- danturi exterioare (n special cremaliere);
- suprafee profilate; etc.
Din punct de vedere al generrii suprafeelor, metodele de prelucrare sunt:
directoare obinut pe cale cinematic ca traiectorie a unui punct:
generatoare: - materializat pe tiul achietor;
- obinut pe cale cinematic:
- ca traiectorie a unui punct;
- ca nfuratoare a poziiilor unei curbe n micare;
- prin rulare (extrem de rar);
- prin programare (rar).
Maini- unelte si prelucrri prin achiere
- 93 -
4.3. Mortezarea
4.3.1. Definire i principiul de lucru
Mortezarea este procedeul de generare prin achiere la care micarea principal este
rectilinie alternativ, aceasta fiind executat n plan vertical de ctre scula achietoare numit
cuit de mortezat. Avansul de achiere, intermitent i la captul unei curse duble a sculei, este
efectuat de ctre masa sistemuiui tehnologic pe care se afl prins piesa supus prelucrrii i
poate fi efectuat ntr-un plan orizontal, fie pe dou direcii perpendiculare (longitudinal i
transversal), fie circular n jurul unei axe verticale.
Principiul de lucru al procedeului, dar i elementele stratului de achiere,sunt artate n
figura 4.4.
Sistemul tehnologic ce realizeaz mortezarea se numete mortez i aceasta poate fi
universal sau cu destinaie special.
4.3.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic
Regimul de achiere, i n acest caz, este caracterizat de:
- viteza de achiere "v" [m/min];
- avansul de achiere "s" [mm/cd; grade/cd];
- adncimea de achiere "t" [mm].
Parametrii cinematici de reglaj ai sistemului tehnologic sunt:
- numrul de curse duble n
cd
[curse duble (cd) / min);
- avansul de achiere "s" [mm/cd; grade/cd];
- adncimea de achiere "ft[mm].
Legtura dintre viteza de achiere i numrul de curse duble este dat tot relaia (4.4).
Fig. 4.4.
b=t
Procedee de prelucrare prin achiere
- 94 -
Legtura dintre parametrii regimului de achiere i parametrii seciunii stratului de achiere,
folosind i figura 4.4 (unde unghiul =90grade). este dat. i n acest caz,.de relaiile (4.2} i
(4.3).
4.3.3 Tipuri de suprafee ce pot fi obinute prin mortezare
Comparativ cu rabotarea, posibilitile de prelucrare ale mortezrii sunt mai diverse att
datorit ptrunderii mai uoare a sculei achietoare n zona de lucru, ct i datorit existenei unui
avans circular. Totui, piesele se pot prelucra pe o lungime mult mai mic n raport cu
rabotarea datorit cursei de lungime mai mic ce este efectuat de ctre scula achietoare.
Se pot prelucra suprafee exterioare dar cu precdere suprafee interioare.
Astfel se pot obine:
- suprafee plane verticale sau nclinate;
- canale de pan la interior i exterior;
- caneluri exterioare i interioare;
- danturi exterioare i interioare;
- suprafee profilate exterioare i interioare; etc.
Din punct de vedere al generrii suprafeelor, metodele de generare, ca i n cazul
rabotrii, sunt:
directoare obinut pe cale cinematic ca traiectorie a unui punct;
generatoare: - materializat pe tiul achietor;
- obinut pe cale cinematic:
- ca traiectorie a unui punct;
- ca nfurtoare a poziiilor unei curbe n micare;
-prin rulare (rar);
- prin programare (rar).
4.4. Burghierea
4.4.1. Definire i principiul de lucru
Burghierea reprezint procedeul de prelucrare prin achiere cu ajutorul cruia se obin
alezaje din plin,( cu ajutorul unei scule achietoare numite burghiu) ; micarea principal este
de rotaie, efectuat fie de scula achieloare, fie de pies,iar avansul de achiere, efectuat n
lungul axei de rotaie, este fcut fie de scula achietoare, fie de pies.
Maini- unelte si prelucrri prin achiere
- 95 -
Burghiul are de regul doi dini dar poate avea i numai unul sau trei.
Principiul de lucru al procedeului precum i elementele seciunii stratului de achiere sunt
exemplificate n figura 4.5.
Sistemul tehnologic care realizeaz burghierea se
numete main de gurit dar prelucrarea poate fi efectuat
pe orice sistem tehnologic ce permite prinderea
semifabricatului i realizarea unei micri de rotaie i a
unei micri de avans axiale (ex: strung, main de gurit
n coordonate, main de alezat i frezat, etc).
Mainile de gurit utilizate au diverse mrimi i diverse
variante constructive, n funcie de destinaia lor. Astfel
avem maini de gurit portabile, maini de gurit cu
montant, maini de gurit cu coloan, maini de gurit
Fig. 4.5. radiale, etc.
4.4.2. Regimul de achiere i parametrii de reglaj ai sistemului
tehnologic
Ca i n cazul celorlalte procedee descrise anterior parametrii regimului de achiere sunt:
- viteza de achiere "v" [m/min];
- avansul de achiere "s" [mm/rot];
- adncimea de achiere "t" [mm].
Parametrii cinematici de reglaj ai sistemului tehnologic sunt:
- turaia "n" [rot/min];
- avansul de achiere "s" [mm/rot].
Adncimea de achiere, n acest caz, este materializat pe tiul achietor i este egal
cu D/2 (fig. 4.5).
Legtura dintre turaie i viteza de achiere este dat de relaia (4.1).
Totodat, legtura dintre parametrii regimului de achiere i parametrii seciunii
stratului de achiere este dat de relaiile (4.5 i 4.6) pentru poriunea "A" i de relaiile (4.7 i
4.8) pentru poriunea "B".
Procedee de prelucrare prin achiere
- 96 -
2
sin 2
) (
sin
0
0
d
b
s a
d D
b
s a
B
Z B
A
Z A
=
=
=
=
;
;
unde, s
z
(mm/dinte) reprezint avansul pe dinte, care este egal cu s/z, Z fiind numrul de dini
ai burghiului (de regul z = 2); iar d
0
(mm) - diametrul miezului burghiului.
Trebuie remarcat faptul c n cazul burghierii se obin numai alezaje cilindrice nfundate
sau strpunse iar metoda de obinere este cu directoare "pe cale cinematic ca traiectorie a unui
punct" i generatoare obinut tot "pe cale cinematic ca traiectorie a unui punct", cu toate
c unele surse bibliografice consider c generatoarea este materializat pe scula achietoare.
4.5. Lrgirea, adncirea, teirea i lamarea
4.5.1. Definire i principiul de lucru
Lrgirea, adncirea, teirea i lamarea sunt procedee tehnologice de prelucrare prin
achiere cu ajutorul crora se obine o modificare a diametrului iniial al unui alezaj cu scopul
mbuntirii preciziei dimensionale i a rugozitii, micorrii abaterilor de form, sau o
prelucrare a unei suprafee plane perpendiculare pe axa unui alezaj iniial, cu ajutorul unor
scule achietoare numite lrgitor. adncitor. teitor, lamator i la care micarea principal este
de rotaie,( a sculei sau a piesei), iar micarea de avans este n lungul axei micrii principale,
fiind efectuat fie de scula achietoare, fie de pies.
Fig. 4.6.
Fig. 4.7.
(4.5.)
(4.6.)
(4.7.)
(4.8.)
Maini- unelte si prelucrri prin achiere
- 97 -
Sculele achietoare enunate n definiie au minim trei dini.
Principiul de lucru al procedeelor precum i elementele seciunii stratului de achiere sunt
exemplificate dup cum urmeaz:
figura 4.6 - lrgire; figura 4.7 - adncire cu cep de ghidare;
figura 4.8. teire; figura 4.9. - adncire profilat; figura 4.10 - lamare.
Sistemul tehnologic care realizeaz lrgirea, adncirea, teirea i lamarea este tot maina
de gurit, dar prelucrarea poate fi efectuat pe orice sistem tehnologic ce permite
prinderea semifabricatului i realizarea unei micri de rotaie i a unei
micri de avans axiale (ex: strung, main de prelucrat n coordonate, main de alezat
i frezat, etc).
4.5.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic
Ca i n cazul burghierii, parametrii regimului de achiere sunt:
- viteza de achiere "v" [m/min];
- avansul de achiere "s" [mm/rot];
- adncimea de achiere "t" [mm].
Parametrii cinematici de reglaj ai sistemului tehnologic sunt:
- turaia "n" [rot/min];
- avansul de achiere "s" [mm/rot"].
Adncimea de achiere, n funcie de diametrul final "D" i diametrul iniial "D
0
", este
egal cu (D - D
0
)/2, (fig. 4.6). Legtura dintre turaie i viteza de achiere este dat de relaia
(4.1).Parametrii regimului de achiere i parametrii seciunii stratului de achiere au legtura dat
de relaiile (4.9 i 4.10):
; sin =
z
s a
; sin 2
) (
0
=
D D
b
Fig. 4.8. Fig. 4.9. Fig. 4.10.
(4.9)
(4.10.)
Procedee de prelucrare prin achiere
- 98 -
Prin lrgire, adncire i teire se obin alezaje cilindrice i conice, nfundate sau
strpunse, cu dimensiuni diferite de alezajul iniial i calitate mbuntit. Lamarea
realizeaz o suprafa plan, n cazul bosajelor, perpendicular pe axa alezajului iniial.
Metoda de obinere este. pentru toate procedeele enunate, cu directoare "pe cale cinematic ca
traiectorie a unui punct" i generatoare obinut tot "pe cale cinematic ca traiectorie a unui
punct".
4.6. Alezarea
4.6.1. Definire i principiul de lucru
Alezarea face parte din aceeai categorie cu lrgirea i reprezint procedeul tehnologic de
prelucrare prin achiere cu ajutorul cruia se realizeaz mrirea preciziei dimensionale i
micorarea rugozitii alezajelor prelucrate anterior, prin burghiere sau lrgire. Micarea
principal la alezare este de rotaie, de regul a sculei achietoare care se numete alezor, sau mai
rar bar de alezat, iar micarea de avans axial, este efectuat de scula achietoarc sau pies.
Alezorul are un numr mai mare de dini dect lrgitorul, iar caracleristic procedeului este
adaosul de prelucrare ce este mult mai mic (ex: 0,1 - 0,3 mm) i viteza de achiere care, de
asemenea, este mai mic fa de procedeul de lrgire.
Principiul de lucru al alezrii ca i elementele seciunii stratului de achiere sunt artate
n figura 4.11.
Sistemele tehnologice cu ajutorul crora se realizeaz alezarea
sunt aceleai ca n cazul burghiererii sau lrgirii (ex: maini de gurit, maini de alezat i frezat,
maini de prelucrat n coordonate, strunguri, etc).
4.6.2. Regimul de achiere i parametrii de reglaj ai sistemului
tehnologic
Ca i n cazul burghiererii, parametrii regimului de achiere sunt:
- viteza de achiere V [m/min];
- avansul de achiere "s" (mm/rot]:
- adncimea de achiere t [mm].
Parametrii cinematici de reglaj ai sistemului tehnologic sunt.
- turaia "n
[rot/min];
- avansul de achiere "s" [mm/rot].
Maini- unelte si prelucrri prin achiere
- 99 -
Adncimea de achiere, n funciede diametrul final "D" i diametru! iniial D
0
", este
egal cu (D D
0
)/2, (fig. 4.11).
Legtura dintre turaie i viteza de achiere este dat de
relaia (4.1). Parametrii regimului de achiere i parametrii
seciunii stratului de achiere au legtura dat de relaiile (4.9 i
4.10).Cu ajutorul alezrii se finiseaz alezaje cilindrice sau
conice, nfundate sau .strpunse, avnd dimensiuni diferite de
cele ale a alezajului iniial, iar metoda de obinere este cu
directoare "pe cale cinematic ca traiectorie a unui punct" i
generatoare obinut tot "pe cale cinematic ca traiectorie a
unui punct".
4.7. Broarea
4.7.1. Definire i principiul de lucru
Broarea este procedeul tehnologic de obinere a diverselor suprafee interioare sau exterioare
la care micarea principal, rectilinie sau circular, este efectuat de scula achietoare iar
avansul este materializat pe scula achietoare numit bro.
Caracteristic brorii este productivitatea deosebit i precizia ridicat a suprafeelor
prelucrate, dar scula achietoare este foarte scump i deci se preteaz n producia de serie
mare i de mas.Broa, spre deosebire de toate celelalte scule achietoare, are mai muli dini
iar fiecare dinte are o supranlare mai mare dect cel anterior, ceea ce face ca avansul de
achiere s fie materializat pe scula achietoare.
Fig. 4.11.
Fig.4.12.
Procedee de prelucrare prin achiere
- 100 -
Principiul de lucru al procedeului i elementele seciunii stratului de achiere se pot
vedea in figura 4.13.
Sistemul tehnologic care realizeaz broarea se numete main de broat, Micarea
principal rectilinie poate fi fcut n plan orizontal sau vertical iar dup cum are loc aplicarea
forei de broare procedeul se poate executa prin tragere sau prin mpingere (fig. 4.13 i 4.12).
Broarea prin tragere se poate efectua att n plan orizontal ct i n p!an vertical iar
broarea prin mpingere are loc numai n plan vertical.
4.7.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic
n cazul brorii, parametrii regimului de achiere sunt:
- viteza de achiere "v" [m/min];
- avansul de achiere 's
z
' sau "a
;
" [mm/dinte] - este materializat pe tiul achietor;
- adncimea de achiere "t" [mm] -este n funcie de limea profilului supus prelucrrii.
Singurul parametru cinematic de reglaj al sistemului tehnologic, i care are legtur cu
regimul de achiere, rmne viteza de achiere "v" ce se poate regla aa cum este determinat
prin calcul. Totui, elemente de reglaj mai sunt, dar nu au legtur cu regimul de achiere, ca
de exemplu, lungimea cursei mainii de broat, care este n funcie de lungimea broei i
lungimea profilului de broat.
4.7.3. Tipuri de suprafee ce pot fi obinute prin broare
Dispozitivul de prindere a piesei
pe maina de broat
Fig.4.13.
Maini- unelte si prelucrri prin achiere
- 101 -
Utiliznd broarea se pot prelucra suprafee exterioare plane i profilate, suprafee
interioare deschise cilindrice i profilate, caneluri interioare, canale de pan, suprafee
elicoidale interioare, roi dinate interioare i exterioare.
Metodele, din punct de vedere al generrii suprafeelor, care se folosesc sunt:
directoare: - materializat pe scula achietoare;
- obinut cinematic ca traiectorie a unui punct.
generatoare: - materializat pe scula achietoare.
4.8. Frezarea
4.8.1. Definire i principiul de lucru
Frezarea este procedeul tehnologic de obinere a suprafeelor prin achiere la care micarea
principal este de rotaie ,a sculei achietoare numit frez, iar micarea de avans este
executat fie de pies fie, de scula achietoare. Procedeul are o larg universalitate datorit,
n mare msur, diverselor construcii de freze.
Principiul de lucru al procedeului ca i elementele stratului de achiere sunt artate n figurile
4.14 i 4.15 unde sunt exemplificate dou posibiliti de lucru, i anume, frezarea n contra
avansului (fig. 4.14) i frezarea n sensul avansuiui (fig. 4.15), cu o frez cilindric.
Fig. 4.14
Procedee de prelucrare prin achiere
- 102 -
Literatura de specialitate prezint i alte scheme de frezare (cu freze: cilindro-frontale,
frontale, disc, unghiulare, profilate, care din punct de vedere al elementelor stratului de
achiere prezint diferene notabile doar la frezarea cu frez frontal (fig.4.17)i cilindro-
frontal (fig. 4.16).
Sistemele tehnologice folosite la frezare se numesc maini de frezat i pot fi de diverse
construcii: orizontale, verticale, universale, carusel, speciale, de copiat, cu comand program,
etc. Frezarea se poate face i pe alte maini-unelte care ndeplinesc cerinele cinematice ale
procedeului (ex maini de alezat i frezat ).
4.8.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic
Parametrii regimului de achiere la frezare sunt:
- viteza de achiere 'V [m/minj:
- avansul pe dinte "s
z
[mm/dinte]:
- adncimea de achiere "t" [mm].
Parametrii cinematici de reglaj ai sistemului tehnologic sunt:
Fig. 4.15 Fig. 4.16
Fig.4.17.
Maini- unelte si prelucrri prin achiere
- 103 -
- turaia frezei "n" [rot /min],
- viteza de avans "v
s
" [mm/min];
- adncimea de achiere "t" [mm].
Legtura dintre viteza de achiere i turaia frezei este dat de relaia (4.11) iar legtura dintre
avansul pe dinte i viteza de avans este dat de relaia (4.12).
n
f
=1000v/nD
f
[rot/min] (4.11 )
unde, "Df "[mm] - diametrul exterior al frezei.
v
s
= s
z
- z n
f
[mm/min] (4.12 )
unde, "z" este numrul de dini ai frezei.
Legtura dintre parametrii regimului de achiere i parametrii stratului de achiere se face
folosind figura 4.14.
o
f
D
l
360
o t
= (4.13)
unde: l [mm] - lungimea stratului de achiere; [] unghiul arcului de contact al frezei cu
materialul de prelucrat.
2
cos 1
2
sin
o o
= ~
z z m
s s a (4.14)
n care, a
m
[mm] reprezint grosimea medie a achiei.
Dar,
f f
f
D
t
D
t
D
2
1
5 . 0
2
cos =
|
|
.
|
\
|
~ o (4.15)
n final rezult:
f
z m
D
t
s a = (4.16)
i
e sin
max
p
b
b = (4.17)
unde: b
max
[mm] - limea maxim a stratului de achiere; b
p
[mm] - limea materialului de
prelucrat; [
o
] - unghiul elicei dinilor frezei.
4.8.3. Tipuri de suprafee ce pot fi obinute prin frezare
Aa cum s-a afirmat mai nainte, frezarea este cel mai complet procedeu de prelucrare
prin achiere n sensul c se pot obine aproape toate suprafeele dorite, datorit modului
particular de construcie a sculei achietoare.
Procedee de prelucrare prin achiere
- 104 -
Se pot prelucra suprafee plane verticale, orizontale, nclinate, combinaii ale celor
anterioare, canale, caneluri, suprafee elicoidale, suprafee evolventice, suprafe e spaiale, etc.
Metodele care se folosesc, din punct de vedere al generrii suprafeelor, sunt:
directoare: - obinut cinematic:
- ca nfurtoare a poziiilor succesive ale unei alte curbe n micare;
- prin programare.
generatoare: - materializat pe scula achietoare;
- obinut cinematic:
- ca nfurtoare a poziiilor succesive ale unei alte curbe;
- prin programare.
4.9. Rectificarea
4.9.1. Definire i principiul de lucru
Rectificarea este procedeul de generare prin achiere la care micarea principal de
rotaie este efectuat de scula achietoare care este un corp abraziv, iar micarea de avans, ce
poate fi rectilinie sau circular, este efectuat de regul de ctre pies. Corpul abraziv este
format din granule abrazive legate de un liant, deci poate fi asemuit cu o frez ce are foarte
muli dini. Funcional rectificarea este similar frezrii.
Corpul abraziv are diverse forme (cilindrice, taler, oal, profilate, etc.) pentru a
prelucra diverse tipuri de suprafee.
Principiul de lucru al procedeului este exemplificat n figurile 4.18, 4.19 i 4.20 unde
se arat rectificarea unei suprafee plane exterioare, a unei suprafee cilindrice exterioare i
rectificarea fr centre a unei suprafee cilindrice exterioare. Sistemul tehnologic care asigur
micrile necesare desfurrii procedeului se numete main de rectificat, care, n funcie de
destinaie, poate fi: de rectificat plan, de rectificat rotund universal, de rectificat fr centre,
special (ex: pentru rectificat filete, roi dinate, etc), etc.
Fig. 4.19
Fig. 4.18
Maini- unelte si prelucrri prin achiere
- 105 -
Datorit multitudinii i diversitii de suprafee ce trebuiesc rectificate s-au dezvoltat
mai multe variante de rectificare, care sunt enumerate mai jos .
a. Rectificarea plan:
cu periferia discului abraziv:
- pe main de rectificat plan cu mas dreptunghiular;
- pe main de rectificat plan cu mas rotund.
cu partea frontal a discului abraziv:
- pe main de rectificat plan cu mas dreptunghiular;
- pe main de rectificat plan cu mas rotund;
- pe main de rectificat cilindric exterior i interior n cazul suprafeelor frontale
plane de la piese cilindrice.
b. Rectificarea cilindric exterioar:
ntre vrfuri (centre):
- cu avans longitudinal;
- cu avans de ptrundere;
- cu avans tangenial.
fr centre (centerless):
- cu avans longitudinal;
- cu avans longitudinal pn la opritor;
- cu avans de ptrundere.
c. Rectificarea cilindric interioar:
cu rotirea piesei;
cu micarea plan a sculei abrazive;
fr vrfuri.
d. Rectificri speciale:
rectificarea filetelor;
rectificarea danturilor;
rectificarea melcilor.
Procedee de prelucrare prin achiere
- 106 -
4.9.2. Regimul de achiere i parametrii de reglaj ai sistemului tehnologic
Parametrii cinematici de reglaj ai sistemului tehnologic depind att de parametrii
regimului de achiere utilizai la varianta de rectificare aleas ct i de maina de rectificat
folosit.
Dac suntem n cazul rectificrii unei suprafee plane exterioare, cu periferia discului
abraziv (fig. 4.18) iar maina de rectificat plan este cu mas dreptunghiular, parametrii
regimului de achiere sunt:
viteza de achiere a discului abraziv - v - [m/s];
viteza de avans a semifabricatului - v
s
- [m/min];
avansul transversal - St - [mm/cd sau mm/cs] (dac limea discului abraziv - B [mm] -
este mai mic dect limea piesei - B
p
[mm] -);
adncimea de achiere -t - [mm].
n cazul de mai sus parametrii cinematici de reglaj ai mainii de rectificat sunt
urmtorii:
turaia discului abraziv -n - [rot/min], i care se determin cu relai a:
n = 60*1000*v/*D [rot/min] ( 4.18)
unde, D [mm] este diametrul discului abraziv; de regul turaia este constant, viteza de
achiere reglndu-se prin diametrul discului abraziv.
numrul de curse duble n
cd
- [cd/min] efectuat de ctre masa mainii de rectificat i care
se calculeaz cu relaia:
l
v
n
s
cd
=
2
1000
[cd/min] ( 4.19)
unde, l [mm] este lungimea unei curse a mesei mainii de rectificat.
avansul transversal (dac limea discului abraziv - B [mm] - este mai mic dect limea
piesei - B
p
[mm] - ) ; s
t
- [mm/cd sau mm/cs];
adncimea de achiere - t - [mm] care se regleaz datorit avansului de reglare - Sr -.
Fig.4.20.
Maini- unelte si prelucrri prin achiere
- 107 -
n aceeai manier ca cea prezentat anterior se determin parametrii cinematici de
reglaj ai mainii de rectificat i pentru alte variante de rectificare, lucru ce este bine tratat n
literatura de specialitate.
4.9.3. Tipuri de suprafee ce se pot obine prin rectificare
Prin rectificare, ca i prin frezare, se pot prelucra suprafee plane verticale, orizontale,
nclinate, combinaii ale celor anterioare, suprafee cilindrice i conice, suprafee profilate,
canale, caneluri, suprafee elicoidale, suprafee evolventice, suprafee spaiale, etc.
Metodele care se folosesc, din punct de vedere al generrii suprafeelor, sunt:
directoare: - obinut cinematic:
- ca nfurtoare a poziiilor succesive ale unei alte curbe n micare;
- prin programare
generatoare: - materializat pe scula achietoare;
- obinut cinematic:
- ca nfurtoare a poziiilor succesive ale unei alte curbe;
- prin programare.
4.10. Honuirea
4.101. Definire i principiul de lucru
Honuirea reprezint procedeul de prelucrare final a alezajelor cilindrice (extrem de
rar alte tipuri de suprafee) cu ajutorul unei scule numit hon, i la care micarea principal
este de rotaie, a sculei, iar micarea de avans este rectilinie alternativ, fiind efectuat tot de
scul (fig. 4.21). Honul este format din bare abrazive de granulaie fin fixate ntr-un cap
special pe elemente elastice.
Pe lng mbuntirea preciziei dimensionale i micorarea rugozitii, honuirea
realizeaz urme ncruciate pe suprafaa prelucrat (fig. 4.22), lucru benefic n cazul cmilor
de cilindru de la motoarele cu ardere intern, deoarece se reine mult mai bine pelicula de ulei
necesar lubrefierii.
Procedee de prelucrare prin achiere
- 108 -
Sistemul tehnologic utilizat la honuire se numete main de honuit, care, dup poziia
axului principal, poate fi vertical, orizontal sau nclinat. Totodat aceste tipuri de maini
pot avea unul sau mai multe axe principale.
Fig. 4.21 Fig. 4.22
Deosebirea dintre honuire i rectificare este dat de faptul c, la honuire, apsarea
sculei abrazive pe suprafaa ce se prelucreaz este de 6-10 ori mai mic, viteza de achiere
este de 50 120 ori mai mic, iar la prelucrare iau parte de 100 1000 ori mai multe granule
abrazive dect la rectificare.
4.10.2. Performanele tehnologice ale honuirii
Pe lng rugozitatea, de o anumit geometrie, obinut datorit cinematicii
procedeului, prin honuire se obin suprafee cu abateri dimensionale cuprinse n treptele 4-5
de precizie i abateri de form de 3 5 m. Rugozitatea suprafeelor obinute prin acest
procedeu este de R
a
=0,4-0,025 m.
Dezavantajele honuirii sunt urmtoarele:
- nu corecteaz poziia axei alezajului;
- performane limitate n cazul metalelor i aliajelor nefer oase.
Din punct de vedere al generrii suprafeelor alezajele se obin prin honuire cu
directoare i generatoare obinut pe cale cinematic, chiar dac baretele abrazive sunt dispuse
pe cerc (directoarea elementar, materializat pe hon, este arc de cerc) i sunt rectilinii
(generatoarea elementar, materializat pe hon, este o dreapt).
Maini- unelte si prelucrri prin achiere
- 109 -
v
v
(frecv.,amplit.) presiune
4.11. Vibronetezirea
Vibronetezirea sau superfinisarea este un procedeu asemntor honuirii, recomandat
pentru suprafee de revoluie exterioare, avnd drept scop mbuntirea calitii suprafeei,
performanele fiind de R
a
=0,2 0,01 m.
Principiul de lucru al procedeului este artat n figura 4.23.
Din figur se poate constata faptul c piesa execut o micare de rotaie (v
p
),
dispozitivul de superfinisat o micare de avans (v
a
), iar barele abrazive o micare vibratorie
rectilinie-alternativ (v
v
) de o anumit amplitudine i frecven.
Din punct de vedere al generrii suprafeelor vibronetezirea se execut cu directoare
cinematic i generatoare materializat. Dac generatoarea suprafeei de prelucrat este mai
mare dect lungimea barei abrazive, atunci este nevoie de micarea de avans, v
a,
caz n care
generatoarea se obine pe cale cinematic, dar cu generatoare elementar (parial)
materializat pe scula achietoare.
4.12. Lepuirea (rodarea)
Lepuirea este prelucrarea prin abrazare ce utilizeaz paste abrazive sau lichide
abrazive i care are ca principiu de lucru micarea relativ, n prezena pastelor abrazive sau a
lichidului abraziv, a unui disc de font (de regul) fa de suprafaa de prelucrat Performanele
lepuirii constau n obinerea unei precizii dimensionale de 0,1 0,5 m, a unei rugoziti de
R
a
0,02m, precum i eliminarea abaterilor de form rmase de la prelucrrile anterioare.
Lepuirea este utilizat cu scopul de a se mri rezistena la oboseal a organelor de
maini (rulmeni, elemente hidraulice, etc.) i pentru mrirea durabilitii sculelor achietoare
sau a calibrelor. n cazul n care piesa- scul se asambleaz cu piesa de prelucrat, procedeul se
numete rodare (ex., rodarea roilor dinate).
Fig. 4.23
Procedee de prelucrare prin achiere
- 110 -
Pentru realizarea suprafeelor lepuite, din punct de vedere al generrii suprafeelor,
generatoarea poate fi materializat, materializat parial sau obinut pe cale cinematic.
Totodat, directoarea este obinut pe cale cinematic sau poate fi i materializat.
Lepuirea se poate executa pe maini de lepuit, pe maini-unelte clasice sau chiar
manual.
4.13. lefuirea i lustruirea
lefuirea este procedeul de netezire a suprafeelor ce se realizeaz cu paste abrazive
depuse pe periferia unor discuri din psl, bumbac, piele, hrtie, etc. aflate n micare de
rotaie, ca i piesa de prelucrat, dar avnd viteze periferice diferite.
Prin lustruire se urmrete mbuntirea calitii suprafeei prelucrate pn la R
a=
0,05 m. Se
pot lefui suprafee plane, de revoluie i profilate. Micarea principal este de rotaie a sculei,
iar cea de avans este efectuat, de regul, de ctre pies.
Lustruirea reprezint un procedeu de mbuntire a calitii suprafeei, pn R
a
=0,02
m, cu ajutorul unor benzi abrazive. Procedeul se recomand pentru suprafee de revoluie la
care micarea principal este de rotaie a piesei, iar micarea avans este efectuat de banda
abraziv; se pot lustrui ns i suprafee plane.
Din punct de vedere al generrii suprafeelor, procedeele se ncadreaz, de regul, n varianta
cu generatoare materializat i directoare obinut cinematic.
Maini- unelte si prelucrri prin achiere
- 111 -
ntrebri de verificare a cunotinelor:
1.Care sunt parametrii regimului de achiere n cadrul procedeului tehnologic de
prelucrare prin strunjire?
2.Exemplificai tipurile de suprafee ce pot fi realizate prin strunjire.
3.Ce procedee de generare/prelucrare prin achiere cunoatei?
4.Definii prelucrarea prin rabotare.
5.Care sunt parametrii cinematici de reglaj ai sistemului tehnologic de prelucrare
prin rabotare?
6.Indicai, pe baza unei schie, principiul de lucru la mortezare.
7.Precizai parametrii regimului de achiere la burghiere.
8.Facei o comparaie ntre lrgire si prelucrarea de teire.
9.Definii procedeul de prelucrare denumit alezare.
10.Ce este broarea?
11.Care sunt parametrii regimului de achiere la frezare?
12.Indicai tipurile de suprafee ce pot fi executate prin frezare.
13.Definii procedeul de generare prin achiere numit rectificare.
14.Care este principiul de lucru al honuirii?
15.Ce reprezint lefuirea i lustruirea?
Procedee de prelucrare prin achiere
- 112 -
Bibliografie
1. Botez, E., Maini-unelte, Vol.I., Editura Tehnic, Bucureti, 1977.
2. Buzatu, C., Popa, I., Novac, Gh., Sisteme flexibile de prelucrare prin achiere, Editura
Tehnic, Bucureti, 1993.
3. Cozmnc, M., Panait, S., Bazele achierii, Editura Gh. Asachi, Iai, 1995.
4. Diu, V., Roca, D.M., Bazele generrii suprafeelor i scule achietoare, Editura Univ.
Transilvania din Braov, 2000.
5. Roca D.M., Prelucrarea prin achiere i abrazare, Editura Univ. Transilvania din
Braov, 2005.
6. Roca, D.M., Scule abrazive pentru construcia de maini, Editura Lux Libris, Braov,
1995.
7. Secar, Gh., Achierea metalelor. Generarea suprafeelor prin achiere.v Editura Univ.
din Braov, 1995.
You might also like
- Prelucrarea Metalelor Prin AschiereDocument10 pagesPrelucrarea Metalelor Prin Aschieresimona1966100% (3)
- Orientarea Şi Fixarea Pieselor În Dispozitivele de FabricareDocument12 pagesOrientarea Şi Fixarea Pieselor În Dispozitivele de FabricareMatei Geanina100% (2)
- Prelucrari Mecanice Prin AschiereDocument423 pagesPrelucrari Mecanice Prin Aschieretanase_v96% (47)
- Principalele Procedee de Prelucrare Prin Aschiere1Document31 pagesPrincipalele Procedee de Prelucrare Prin Aschiere1arthurandras100% (1)
- Freza Melc - FinalDocument11 pagesFreza Melc - FinalCălin Florian100% (1)
- Caiet Practica - FrezareaDocument19 pagesCaiet Practica - Frezareaarthurandras78% (9)
- Tehnologia Fabricarii ProduselorDocument45 pagesTehnologia Fabricarii Produselorionpopa8990No ratings yet
- FrezareDocument15 pagesFrezareAlexandra Elena Ilinca100% (1)
- Proiect de DiplomaDocument88 pagesProiect de DiplomaIonuţIpNo ratings yet
- Tehnologii Si Sisteme de PrelucrareDocument27 pagesTehnologii Si Sisteme de Prelucrarediana_mc100% (1)
- CALCUL FORTA AschiereDocument36 pagesCALCUL FORTA Aschieremonarh22100% (4)
- Prelucrari Prin GaurireDocument39 pagesPrelucrari Prin Gauriretanase_v89% (19)
- Prelucrarea Prin Deformare Plastica La ReceDocument23 pagesPrelucrarea Prin Deformare Plastica La ReceLidia BanciuNo ratings yet
- Dispozitiv Pentru Indoit TeviDocument41 pagesDispozitiv Pentru Indoit TeviBrendea Mariana Gabriela100% (2)
- Strunjirea ConicaDocument22 pagesStrunjirea ConicaSelma PKNo ratings yet
- Calculul Parametrilor Regimului de AşchiereDocument10 pagesCalculul Parametrilor Regimului de Aşchiereknall_adrian88% (8)
- Cutite ProfilateDocument9 pagesCutite Profilatemalick_l_c100% (1)
- Prelucrarea Prin StrunjireDocument40 pagesPrelucrarea Prin Strunjiretanase_v90% (30)
- Exemplu Proiect PDPRDocument34 pagesExemplu Proiect PDPRCristi AntonNo ratings yet
- Conceptia Constructiv Tehnologica A Unor Matrite Pentru Injectarea Maselor PlasticeDocument75 pagesConceptia Constructiv Tehnologica A Unor Matrite Pentru Injectarea Maselor PlasticeMarius Vaida100% (2)
- Proiect PsaDocument21 pagesProiect Psagta_to100% (2)
- Ezarea, Gaurirea, Filetarea Rectificarea, Rabotarea, Mortezarea 3123123 PDFDocument8 pagesEzarea, Gaurirea, Filetarea Rectificarea, Rabotarea, Mortezarea 3123123 PDFIonut BîrsuNo ratings yet
- Locul Şi Rolul Dispozitivelor În Construcţia de MaşiniDocument5 pagesLocul Şi Rolul Dispozitivelor În Construcţia de MaşiniTudorLeşan100% (1)
- ElectroeroziuneDocument15 pagesElectroeroziuneVladimir Comsa100% (1)
- Proiect TCM Anul 4Document9 pagesProiect TCM Anul 4Marius TomaNo ratings yet
- StrungDocument21 pagesStrungMuresan IonutNo ratings yet
- Tehnologia Prelucrarii La ReceDocument92 pagesTehnologia Prelucrarii La Recebiliboi5100% (2)
- Roti DintateDocument42 pagesRoti DintateLiviu Marian MoldoveanuNo ratings yet
- Proiect Final DoruDocument53 pagesProiect Final DoruMouaddib67% (3)
- Tehnologii Tip de Fabricare A Pieselor de Automobil Cu Suprafete Preponderent de RevolutieDocument112 pagesTehnologii Tip de Fabricare A Pieselor de Automobil Cu Suprafete Preponderent de RevolutieVlad Donose100% (2)
- Proiect de DiplomaDocument45 pagesProiect de DiplomaGrigoreMarianAlexandruNo ratings yet
- Strung NormalDocument20 pagesStrung Normaljugrestan_claudiu100% (1)
- Iozsa & Bejan - Fabricarea Si Repararea Industriala A AutovehiculelorDocument66 pagesIozsa & Bejan - Fabricarea Si Repararea Industriala A AutovehiculelorTeddy xDNo ratings yet
- Bazele AschieriiDocument236 pagesBazele AschieriiAlexandra Nicoleta FoantaNo ratings yet
- Indrumar Dinamica (Fara Parola)Document204 pagesIndrumar Dinamica (Fara Parola)laura2103383% (6)
- Licenta Flansa de LegaturaDocument192 pagesLicenta Flansa de Legaturacocalaurentiu100% (3)
- Punte Rigida AutobuzDocument102 pagesPunte Rigida AutobuzCosmin CocoNo ratings yet
- Cca PDFDocument247 pagesCca PDFTudor IonuțNo ratings yet
- Fabricarea Si Repararea Industriala A AutovehiculelorDocument82 pagesFabricarea Si Repararea Industriala A AutovehiculelorDragos Enache100% (5)
- Organe de Masini Vol IDocument310 pagesOrgane de Masini Vol IUreche Ilie100% (1)
- Builescu Florin AdrianDocument87 pagesBuilescu Florin AdrianAndrey MantaNo ratings yet
- Bazele Tehnologiilor de Fabricatie in Constructia de MasiniDocument178 pagesBazele Tehnologiilor de Fabricatie in Constructia de Masinialin tinc100% (1)
- Bazele Tehnologiilor de Fabricatie in CoDocument191 pagesBazele Tehnologiilor de Fabricatie in CoDaniel OprutaNo ratings yet
- Bazele Tehnologiilor de Fabricare În Construcţia de Maşini: Lucian GramaDocument186 pagesBazele Tehnologiilor de Fabricare În Construcţia de Maşini: Lucian Gramamyaaa94No ratings yet
- Freza Disc Modul DiplomaDocument80 pagesFreza Disc Modul DiplomaCorobceanu Marina100% (1)
- Proict CricDocument31 pagesProict CricIulian FiNo ratings yet
- Mecanism Surub-PiulitaDocument82 pagesMecanism Surub-PiulitaMishu Triboi100% (1)
- Proiect ArboreDocument36 pagesProiect ArboreClaudiu DinuNo ratings yet
- Proiect FRIA SupapaDocument65 pagesProiect FRIA SupapaPaul PredaNo ratings yet
- Bazele AschieriiDocument179 pagesBazele AschieriiNicolae Radu100% (1)
- Programarea Si Operarea Centrelor de Prelucrare CNC - SDocument247 pagesProgramarea Si Operarea Centrelor de Prelucrare CNC - SMia Mian100% (6)
- Managementul ProductieiDocument85 pagesManagementul ProductieiAlina Onet100% (2)
- Automobile Proiect FurgonDocument82 pagesAutomobile Proiect FurgonSilviu MarinNo ratings yet
- FurgonDocument82 pagesFurgonmihnea09No ratings yet
- Carte 1 ProiectDocument215 pagesCarte 1 ProiectIulian TicleNo ratings yet
- Tehnologia Fabricarii Si Reparari UtilajDocument249 pagesTehnologia Fabricarii Si Reparari UtilajAndrei Candrea100% (1)
- Prezentare LicentaDocument19 pagesPrezentare Licentacristianul86No ratings yet
- MomDocument173 pagesMomLaura Cristiana Iacob100% (1)
- Licenta JacardDocument77 pagesLicenta JacardAlexandra Ghile100% (1)
- Calcul Termic. Mas 55kW 5000rotDocument6 pagesCalcul Termic. Mas 55kW 5000rottotocsNo ratings yet
- Electronic ADocument73 pagesElectronic Atotocs100% (1)
- ChimieDocument105 pagesChimietotocs100% (3)
- Fizica CursDocument61 pagesFizica Curstotocs100% (1)
- Analiza Matematica CursDocument116 pagesAnaliza Matematica Curstotocs100% (2)
- Desen Tehnic Si Infografica IIDocument159 pagesDesen Tehnic Si Infografica IItotocs100% (3)