You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Examination Based On RfidDocument62 pagesExamination Based On Rfidsudhakar5472100% (2)
- COMPUTER ARCHITECTURE FUNDAMENTALSDocument24 pagesCOMPUTER ARCHITECTURE FUNDAMENTALSazhiNo ratings yet
- Instruction Cycle and Addressing Modes in 8085 MicroprocessorDocument17 pagesInstruction Cycle and Addressing Modes in 8085 MicroprocessorLata SinhaNo ratings yet
- Pacsystems Rx3I Mid-Range Controller Pacsystems ControlDocument53 pagesPacsystems Rx3I Mid-Range Controller Pacsystems ControlManoel Machado BarbosaNo ratings yet
- Anwesha - John Deere - InterviewDocument2 pagesAnwesha - John Deere - InterviewAsit kumar pradhanNo ratings yet
- Courses EECE DeptDocument33 pagesCourses EECE Deptshahzad pervezNo ratings yet
- Not Gate Using Transistor - Google SearchDocument2 pagesNot Gate Using Transistor - Google SearchHimanshu KumarNo ratings yet
- OptimizeAndy PDFDocument3 pagesOptimizeAndy PDFSergioSanchezNo ratings yet
- Datasheet ECM 3508 Interface 4pgv1 A80401 PressDocument4 pagesDatasheet ECM 3508 Interface 4pgv1 A80401 Presslgreilly4No ratings yet
- DP LAN Intel 14060 DriversDocument285 pagesDP LAN Intel 14060 Driversberto_716No ratings yet
- 1K/2K/4K 5.0V CMOS Serial EEPROM: Features Package TypeDocument8 pages1K/2K/4K 5.0V CMOS Serial EEPROM: Features Package TypeHarris RaoNo ratings yet
- Intel Case Study - PresentationDocument26 pagesIntel Case Study - Presentationravinder_bhandari080% (1)
- Memory Unit - 5 Coa PDFDocument18 pagesMemory Unit - 5 Coa PDFArun KrishNo ratings yet
- Unit3 AVR Microcontroller IntroductionDocument120 pagesUnit3 AVR Microcontroller IntroductionBreeje AnadkatNo ratings yet
- USBaspDocument3 pagesUSBaspShahrin MahatNo ratings yet
- Unit II 16 Bit Microprocessor Architecture 9Document37 pagesUnit II 16 Bit Microprocessor Architecture 9singhrps84100% (1)
- Unit of Computer SystemDocument3 pagesUnit of Computer SystemvishalaroraccnaNo ratings yet
- Components of the System UnitDocument31 pagesComponents of the System Unita yuNo ratings yet
- Time Operated Electrical Appliances ControlDocument9 pagesTime Operated Electrical Appliances ControlSadaf GulshadNo ratings yet
- PLC FatekDocument36 pagesPLC FatekM7mud M7mdNo ratings yet
- 10 MHZ PIM-TB10 Turbo Mainboard PDFDocument13 pages10 MHZ PIM-TB10 Turbo Mainboard PDFLuis TavisNo ratings yet
- Mca R16-Scet SyllabusDocument135 pagesMca R16-Scet SyllabusSiva KiranNo ratings yet
- Dspic® Digital Signal ControllersDocument6 pagesDspic® Digital Signal ControllersAron Van100% (2)
- USARTDocument17 pagesUSARTtharunvenkataNo ratings yet
- Seven Segment Led Display Interface - FinalDocument6 pagesSeven Segment Led Display Interface - FinalVivek Jhunjhunwala100% (1)
- S7 Automation SolutionsDocument25 pagesS7 Automation SolutionsNeagoe CristianNo ratings yet
- x4540 Systems TSC Thumper Thor TOI PartaDocument130 pagesx4540 Systems TSC Thumper Thor TOI PartaCarlita RamosNo ratings yet
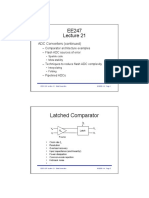
- Latched Comparator: ADC Converters (Continued)Document28 pagesLatched Comparator: ADC Converters (Continued)shriniwas ghadyaljiNo ratings yet
- Basics of CMOS Cell DesignDocument12 pagesBasics of CMOS Cell DesignDavid Villamarin RiveraNo ratings yet