Code :R5220206 R5
II B.Tech II Semester (R05) Supplementary Examinations, December 2010
CONTROL SYSTEMS
(Electrical & Electronics Engineering, Electronics & Communication Engineering,
Electronics & Instrumentation Engineering, Electronics & Control Engineering, Electronics
& Computer Engineering)
Time: 3 hours Max Marks: 80
Answer any FIVE questions
All questions carry equal marks
?????
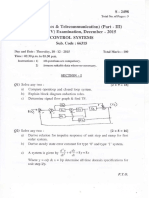
1. (a) Explain the linearizing effect of feedback.
(b) The dynamic behaviour of the system is described by the equation,
dC
dt
+ 10C = 40e, where ‘e’ is the input and ‘C’ is the output. Determine the transfer
function of the system.
2. Write notes on the following:
(a) Field controlled d.c. motor
(b) Armature controlled d.c. motor.
3. (a) Obtain generalized error series and indicate the evaluation of the dynamic error coeffi-
cients?
2
(b) A closed loop servo is represented by the differential equation ddt2c + 8 dc
dt
= 64e Where c is
the displacement of the output shaft , r is the displacement of the input shaft and e=r-c.
Determine under damped natural frequency, damping ratio and % Mp for unit step input.
4. For a unity feedback system having forward path transfer function
K
G(S) = s(1+0.6S)(1+0.4S) . Determine
(a) The range of values of K
(b) Marginal value of K
(c) Frequency of sustained oscillations.
5. (a) Derive the expressions for resonant peak & resonant frequency and hence establish the
correlation between time response & frequency response.
(b) Given ζ = 0.7 & ωn = 10 r/s find resonant peak, resonant frequency & Bandwidth.
6. (a) “Addition of a non zero pole to a transfer function results in further rotation of the polar
plot by −90o as ω → ∞”. Justify with the help of an example
1
(b) A system is given by G(s) = s2 (s+1)(s+10) . Determine the magnitude & phase angle at zero
& ∞ frequencies. Hence sketch the polar plot.
K
7. The open loop transfer function of unity feedback system is G(s) = S(S+1)
.
It is desired to have the velocity error constant KV = 12 Sec−1 . and phase margin as 400
Design lead compensator to meet the above specifications.
8. (a) Given h i
0 1
ẋ (t) = −2 3 x (t) = Ax (t)
Find hthe eigen
i values and vectors and response when
1
x0 = 1
(b) Obtain the state variable representation of armature controlled dc motor?
?????
You might also like
- Mid-Sem II, April 2014 EE-1163, Control System: K (Ts+1) ) 2 (1 - + R (S) C (S)Document1 pageMid-Sem II, April 2014 EE-1163, Control System: K (Ts+1) ) 2 (1 - + R (S) C (S)S JainNo ratings yet
- Mech3418 Ca 2016Document4 pagesMech3418 Ca 2016Barry PoonNo ratings yet
- EE3002 Past Exam PaperDocument7 pagesEE3002 Past Exam PaperKranthirekha ChennaboinaNo ratings yet
- Part - B: Common Data For Question 1 and 2Document15 pagesPart - B: Common Data For Question 1 and 2satya_saraswat_1No ratings yet
- 06 ESm 43 MQDocument6 pages06 ESm 43 MQGuruprasadNo ratings yet
- MEC E 420 Feedback Control Dynamic SystemsDocument8 pagesMEC E 420 Feedback Control Dynamic SystemscatzzruleNo ratings yet
- Old Question Paper Control SystemsDocument7 pagesOld Question Paper Control SystemsSatendra KushwahaNo ratings yet
- R7411008-Digital Control SystemsDocument4 pagesR7411008-Digital Control SystemssivabharathamurthyNo ratings yet
- MDPN372 PS5 Spring 2021Document2 pagesMDPN372 PS5 Spring 2021akhbar elyoum academyNo ratings yet
- EEET2109 MST 2014 Answers PDFDocument4 pagesEEET2109 MST 2014 Answers PDFCollin lcwNo ratings yet
- EEE3005 Exam PaperDocument6 pagesEEE3005 Exam PaperEthan OwNo ratings yet
- CS Previous Question PapersDocument48 pagesCS Previous Question PapersShaleva SinghNo ratings yet
- 5935r09-Digital Control SystemsDocument2 pages5935r09-Digital Control SystemsSaikumar NemalikantiNo ratings yet
- GATE EC 2017 (Set - 2) QuestionsDocument8 pagesGATE EC 2017 (Set - 2) QuestionsZakariya MohammedNo ratings yet
- Assignment NewDocument10 pagesAssignment NewChitra M. chitra.eceNo ratings yet
- Ee2253 - Control Systems April-May 2010Document3 pagesEe2253 - Control Systems April-May 2010durgabalNo ratings yet
- BMS College of Engineering, Bangalore-560019: May 2016 Semester End Main ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: May 2016 Semester End Main Examinationskoushik bhatNo ratings yet
- Ee304 ADocument3 pagesEe304 AAboo FarisNo ratings yet
- MEEPC 20dcs2 Digital Control SystemsDocument2 pagesMEEPC 20dcs2 Digital Control SystemsMelissa CannonNo ratings yet
- AE61Document4 pagesAE61Anima SenNo ratings yet
- PTEE7301 April-2021Document2 pagesPTEE7301 April-2021imman46920No ratings yet
- Process Dynamics and Control (CHD 324) Assignment 3: K 100 0.2 s+1 20s K R(S) Y(s)Document2 pagesProcess Dynamics and Control (CHD 324) Assignment 3: K 100 0.2 s+1 20s K R(S) Y(s)Ashish KushwahaNo ratings yet
- Control SystemDocument26 pagesControl SystemshubhamNo ratings yet
- Cs April 2011Document8 pagesCs April 201129viswa12No ratings yet
- r05220205 Control SystemsDocument9 pagesr05220205 Control SystemsSrinivasa Rao G100% (3)
- Nr220405-Control SystemsDocument8 pagesNr220405-Control SystemsSRINIVASA RAO GANTANo ratings yet
- QP 2Document3 pagesQP 2srinimehaNo ratings yet
- Control Systems and Mechatronics ExamDocument4 pagesControl Systems and Mechatronics ExamOdoch HerbertNo ratings yet
- QP D15 De57 PDFDocument3 pagesQP D15 De57 PDFRajashekarBalyaNo ratings yet
- TUTORIAL 7 - Steady-State ErrorDocument4 pagesTUTORIAL 7 - Steady-State ErrortiraNo ratings yet
- Control Systems-1 PDFDocument8 pagesControl Systems-1 PDFmaheshbabu527No ratings yet
- Control System 1st Mid Term Paper July Dec 2015Document17 pagesControl System 1st Mid Term Paper July Dec 2015VIPUL100% (1)
- QuizDocument6 pagesQuizSelva SNo ratings yet
- 1st Semester CircuitDocument2 pages1st Semester Circuiteuge sylNo ratings yet
- Control SystemsDocument8 pagesControl SystemssaidurgaNo ratings yet
- Nr-220206 Control SystemsDocument8 pagesNr-220206 Control SystemsSrinivasa Rao G100% (1)
- ConSys Compre (2017-18)Document2 pagesConSys Compre (2017-18)Dev ShahNo ratings yet
- Control Systems Eee Nov 2020Document3 pagesControl Systems Eee Nov 2020Department of Electronics and Communication Engineering AKNUNo ratings yet
- Control Systems Unitwise Important Questions Unit 1 Part ADocument10 pagesControl Systems Unitwise Important Questions Unit 1 Part AChandra shekarNo ratings yet
- Question Paper Code:: (10×2 20 Marks)Document4 pagesQuestion Paper Code:: (10×2 20 Marks)MohamedNo ratings yet
- IES 2001 EE Conventional Paper01Document4 pagesIES 2001 EE Conventional Paper01Shubham KumarNo ratings yet
- CSDocument2 pagesCSmallapishyamreddyNo ratings yet
- IES CONV Electrical Engineering 2006Document12 pagesIES CONV Electrical Engineering 2006jitenNo ratings yet
- IES 2006 EE Conventional Paper01Document5 pagesIES 2006 EE Conventional Paper01Shubham KumarNo ratings yet
- Te Unit-2 MCQ PDFDocument10 pagesTe Unit-2 MCQ PDFRajNo ratings yet
- Gujarat Technological University: Subject Code:2141004 Subject Name:Control System Engineering Time:10:30 AM To 01:00 PMDocument3 pagesGujarat Technological University: Subject Code:2141004 Subject Name:Control System Engineering Time:10:30 AM To 01:00 PMvisupinuNo ratings yet
- Rr410201 Digital Signal ProcessingDocument1 pageRr410201 Digital Signal ProcessingsivabharathamurthyNo ratings yet
- Cat 2 - CS - EeeDocument4 pagesCat 2 - CS - EeegallantprakashNo ratings yet
- 141312-141701-Control - Winter - 2013 CT PDFDocument2 pages141312-141701-Control - Winter - 2013 CT PDFvisupinuNo ratings yet
- II B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Document8 pagesII B. Tech II Semester II B. Tech II Semester Regular Examinations August - 2014 Control Systems 2014Sandeep YandamuriNo ratings yet
- r05320201 Digital Signal ProcessingDocument8 pagesr05320201 Digital Signal ProcessingSRINIVASA RAO GANTANo ratings yet
- CS Dec 15Document3 pagesCS Dec 15SAURABH BHISENo ratings yet
- Electronics Sample Paper 5Document12 pagesElectronics Sample Paper 5gunasekaran kNo ratings yet
- Control SystemsDocument8 pagesControl SystemsprakashjntuNo ratings yet
- GATE Me 1991Document13 pagesGATE Me 1991XADA YADANo ratings yet
- Electrochemical Processes in Biological SystemsFrom EverandElectrochemical Processes in Biological SystemsAndrzej LewenstamNo ratings yet
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- Organic Light-Emitting Transistors: Towards the Next Generation Display TechnologyFrom EverandOrganic Light-Emitting Transistors: Towards the Next Generation Display TechnologyNo ratings yet
- 07A4EC01 Environmental StudiesDocument1 page07A4EC01 Environmental StudiessivabharathamurthyNo ratings yet
- R7410506 Mobile ComputingDocument1 pageR7410506 Mobile ComputingsivabharathamurthyNo ratings yet
- Control Systems (CS) Notes As Per JntuaDocument203 pagesControl Systems (CS) Notes As Per Jntuasivabharathamurthy100% (3)
- R7312301 Transport Phenomena in BioprocessesDocument1 pageR7312301 Transport Phenomena in BioprocessessivabharathamurthyNo ratings yet
- 9A05707 Software Project ManagementDocument4 pages9A05707 Software Project ManagementsivabharathamurthyNo ratings yet
- SSC Social Textbook (AP)Document100 pagesSSC Social Textbook (AP)sivabharathamurthyNo ratings yet
- R5410201 Neural Networks & Fuzzy LogicDocument1 pageR5410201 Neural Networks & Fuzzy LogicsivabharathamurthyNo ratings yet
- R7310406 Digital CommunicationsDocument1 pageR7310406 Digital CommunicationssivabharathamurthyNo ratings yet
- 9A13701 Robotics and AutomationDocument4 pages9A13701 Robotics and AutomationsivabharathamurthyNo ratings yet
- R7311006 Process Control InstrumentationDocument1 pageR7311006 Process Control InstrumentationsivabharathamurthyNo ratings yet
- R7310206 Linear Systems AnalysisDocument1 pageR7310206 Linear Systems AnalysissivabharathamurthyNo ratings yet
- R7311205 Distributed DatabasesDocument1 pageR7311205 Distributed DatabasessivabharathamurthyNo ratings yet
- R7311506 Operating SystemsDocument1 pageR7311506 Operating SystemssivabharathamurthyNo ratings yet
- Code: R7311306: (Electronics & Control Engineering)Document1 pageCode: R7311306: (Electronics & Control Engineering)sivabharathamurthyNo ratings yet
- 9A14503 Principles of Machine DesignDocument8 pages9A14503 Principles of Machine DesignsivabharathamurthyNo ratings yet
- 9A21506 Mechanisms & Mechanical DesignDocument8 pages9A21506 Mechanisms & Mechanical DesignsivabharathamurthyNo ratings yet
- 9A15502 Digital System DesignDocument4 pages9A15502 Digital System Designsivabharathamurthy100% (1)
- R7310106 Engineering GeologyDocument1 pageR7310106 Engineering GeologysivabharathamurthyNo ratings yet
- 9A10505 Principles of CommunicationsDocument4 pages9A10505 Principles of CommunicationssivabharathamurthyNo ratings yet
- 9A23501 Heat Transfer in BioprocessesDocument4 pages9A23501 Heat Transfer in BioprocessessivabharathamurthyNo ratings yet
- R7412311 Metabolic EngineeringDocument1 pageR7412311 Metabolic EngineeringsivabharathamurthyNo ratings yet
- R5310204 Power ElectronicsDocument1 pageR5310204 Power ElectronicssivabharathamurthyNo ratings yet
- R7411307 Instrumentation & Control in Manufacturing SystemsDocument1 pageR7411307 Instrumentation & Control in Manufacturing SystemssivabharathamurthyNo ratings yet
- 9A02505 Electrical Machines-IIIDocument4 pages9A02505 Electrical Machines-IIIsivabharathamurthyNo ratings yet
- R7412310 Nano BiotechnologyDocument1 pageR7412310 Nano BiotechnologysivabharathamurthyNo ratings yet
- R7411509 Distributed DatabasesDocument1 pageR7411509 Distributed DatabasessivabharathamurthyNo ratings yet
- 9A04504 Digital IC ApplicationsDocument4 pages9A04504 Digital IC ApplicationssivabharathamurthyNo ratings yet
- 9A03505 Heat TransferDocument4 pages9A03505 Heat TransfersivabharathamurthyNo ratings yet
- R7411510 Neural NetworksDocument1 pageR7411510 Neural NetworkssivabharathamurthyNo ratings yet
- R7411306 Robotics & AutomationDocument1 pageR7411306 Robotics & AutomationsivabharathamurthyNo ratings yet
- ABB - ACS880-37 - Hardware Manual 160-3200kWDocument278 pagesABB - ACS880-37 - Hardware Manual 160-3200kWLuisNo ratings yet
- 3 DAD-N-103 Relay SettingsDocument24 pages3 DAD-N-103 Relay SettingsEagle AgilityNo ratings yet
- Fluke 37x Calibation Manual PDFDocument24 pagesFluke 37x Calibation Manual PDFAllamNo ratings yet
- SC3 W100adDocument2 pagesSC3 W100adpandavision76No ratings yet
- Automatic Meter ReadingDocument16 pagesAutomatic Meter ReadingDrVikas Singh BhadoriaNo ratings yet
- The 8051 Microcontroller: (Please Ignore Repeated Slides If Any. Also, Refer Text Too While Studying All The Slides)Document78 pagesThe 8051 Microcontroller: (Please Ignore Repeated Slides If Any. Also, Refer Text Too While Studying All The Slides)Nicky SanthoshNo ratings yet
- Frigidaire LTF2940ES1 Tech SheetDocument6 pagesFrigidaire LTF2940ES1 Tech SheetSamurai Appliance Repair Man100% (2)
- Multi-Port Flow Selector Valve: KitsnetDocument14 pagesMulti-Port Flow Selector Valve: KitsnetNigin ParambathNo ratings yet
- E 0 A 6Document4 pagesE 0 A 6EdNo ratings yet
- Cellphone Service Training: CommonDocument5 pagesCellphone Service Training: CommonpkrajniNo ratings yet
- A OY UX: Service Manual Service Manual Service Manual Service ManualDocument29 pagesA OY UX: Service Manual Service Manual Service Manual Service ManualFreddy RiveraNo ratings yet
- Impedance Spectroscopy and Experimental SetupDocument18 pagesImpedance Spectroscopy and Experimental SetupJako SibueaNo ratings yet
- RM3100 Breakout Board Sales SheetDocument2 pagesRM3100 Breakout Board Sales Sheetkostya_4524No ratings yet
- 309 Hobart GPU 400 600 Sept 2015Document2 pages309 Hobart GPU 400 600 Sept 2015ReginaldoNo ratings yet
- Chapter 17 (Lect 48 and Micro Programmed Control Intro.)Document15 pagesChapter 17 (Lect 48 and Micro Programmed Control Intro.)nancy_01No ratings yet
- Vp0104 Vp0106 Vp0109 P-Channel Enhancement-Mode Vertical Dmos FetsDocument4 pagesVp0104 Vp0106 Vp0109 P-Channel Enhancement-Mode Vertical Dmos FetsGabriel RacovskyNo ratings yet
- ST 1600Document27 pagesST 1600Gustavo RussoNo ratings yet
- IEC - Tests Set Tough Standards For Surge ImmunityDocument2 pagesIEC - Tests Set Tough Standards For Surge ImmunityHowk RiosNo ratings yet
- ENE410 Study Guide 2019Document33 pagesENE410 Study Guide 2019ShivaaniNo ratings yet
- Final Project in Electronics II: Submitted To: Engineer Jojie Mae Lozarita Submitted byDocument5 pagesFinal Project in Electronics II: Submitted To: Engineer Jojie Mae Lozarita Submitted byMarc BacusNo ratings yet
- Cascode Amplifier DesignDocument7 pagesCascode Amplifier DesignKhurram SamiNo ratings yet
- Ficha Técnica Control de Alarmas y Dispositivos de EmergenciaDocument33 pagesFicha Técnica Control de Alarmas y Dispositivos de EmergenciaLuis Garcia MartinezNo ratings yet
- Vending MachineDocument11 pagesVending MachineMaged AldhaeebiNo ratings yet
- Delta Modulation Using GNU RadioDocument6 pagesDelta Modulation Using GNU RadioRakesh S K50% (2)
- FinalDocument178 pagesFinalBiki JhaNo ratings yet
- Line Follower RobotDocument62 pagesLine Follower RobotPraveen Khatkale PatilNo ratings yet
- Freelander 1 NAS MY04 - Electrical LibraryDocument629 pagesFreelander 1 NAS MY04 - Electrical LibraryWan SaulNo ratings yet
- Ups Part 2Document5 pagesUps Part 2NeztopNo ratings yet
- Dap002 L5991Document19 pagesDap002 L5991EulerMartinsDeMelloNo ratings yet
- Circuit Theorems: School of Electrical InformationDocument21 pagesCircuit Theorems: School of Electrical InformationAvishka PriyanjanaNo ratings yet