You might also like
- Pipelining: Mod I, Part IIIDocument39 pagesPipelining: Mod I, Part IIIann lynnNo ratings yet
- Unit 6 PipeliningDocument19 pagesUnit 6 PipeliningadfasdfadsfdsfNo ratings yet
- Pipelining Techniques ExplainedDocument8 pagesPipelining Techniques ExplainedDinesh Kumara YapaNo ratings yet
- Comparison Between PipeliningDocument9 pagesComparison Between PipeliningBibek Ale MagarNo ratings yet
- CH7-Parallel and Pipelined ProcessingDocument23 pagesCH7-Parallel and Pipelined Processingaashifr469No ratings yet
- Parallel Processing Pipelining Characteristics of Multiprocessors Interconnection Structures Inter Processor Arbitration Inter Processor Communication and SynchronizationDocument13 pagesParallel Processing Pipelining Characteristics of Multiprocessors Interconnection Structures Inter Processor Arbitration Inter Processor Communication and SynchronizationYash Gupta MauryaNo ratings yet
- Pipelining Basic Concepts: Instruction Fetch Execute Operand Fetch IF OF EXDocument28 pagesPipelining Basic Concepts: Instruction Fetch Execute Operand Fetch IF OF EXSyed AshmadNo ratings yet
- 13054119-176 - Pipelining - Aqsa SaleemDocument21 pages13054119-176 - Pipelining - Aqsa SaleemMasoomBachiiNo ratings yet
- MIPS Pipeline in DetailDocument3 pagesMIPS Pipeline in DetailBravoYusuf50% (2)
- Evolution of Computer Systems LectureDocument49 pagesEvolution of Computer Systems LectureUshashi NandiNo ratings yet
- Pipeline and VectorDocument29 pagesPipeline and VectorGâgäñ LøhîăNo ratings yet
- Computer Architecture Pipe LineDocument28 pagesComputer Architecture Pipe LineNAHID TECHNOLOGYNo ratings yet
- PipeliningDocument10 pagesPipeliningyogesh deoNo ratings yet
- Pipelining DLX PDFDocument64 pagesPipelining DLX PDFKunal SinghNo ratings yet
- Parallel ProcessingDocument32 pagesParallel ProcessingMannan BansalNo ratings yet
- Characterize Pipelines and Pipelining TechniquesDocument21 pagesCharacterize Pipelines and Pipelining TechniquesZainNo ratings yet
- DigitalLogic ComputerOrganization L23 Multicore HandoutDocument32 pagesDigitalLogic ComputerOrganization L23 Multicore HandoutPhan Tuấn KhôiNo ratings yet
- Pipelining and Vector ProcessingDocument28 pagesPipelining and Vector ProcessingBinuVargisNo ratings yet
- 3 Introduction PipelineDocument149 pages3 Introduction PipelineIshwar MhtNo ratings yet
- Week11 SlidesDocument49 pagesWeek11 SlidesVansh JainNo ratings yet
- Week 11 ReducedDocument29 pagesWeek 11 Reducedv69gnf5csyNo ratings yet
- Datapath ArchitectureDocument15 pagesDatapath Architecturebijan shresthaNo ratings yet
- Contact Session 8Document63 pagesContact Session 8Prasana VenkateshNo ratings yet
- CMPS293&290 Class Notes Chap 02Document24 pagesCMPS293&290 Class Notes Chap 02hassanNo ratings yet
- Computer Architecture: Pipelining: Dr. Ashok Kumar TurukDocument136 pagesComputer Architecture: Pipelining: Dr. Ashok Kumar TurukkoottyNo ratings yet
- Pipe LiningDocument16 pagesPipe LiningMUNEEBA GULNo ratings yet
- Component Operation: 16.1 Pipeline and Instruction FlowDocument46 pagesComponent Operation: 16.1 Pipeline and Instruction FlowMamudi 79No ratings yet
- Lect. 3: Superscalar Processors: - Data Dependence (A.k.a. Read After Write - RAW) - Control DependenceDocument24 pagesLect. 3: Superscalar Processors: - Data Dependence (A.k.a. Read After Write - RAW) - Control Dependencefree5050No ratings yet
- Pipelining (All Slides)Document45 pagesPipelining (All Slides)NISHIT JAINNo ratings yet
- Parallel Processing: Execution of Concurrent Events in The Computing Process To Achieve Faster Computational SpeedDocument10 pagesParallel Processing: Execution of Concurrent Events in The Computing Process To Achieve Faster Computational SpeedGeorgian ChailNo ratings yet
- Parallelism in Uniprocessor System and GranularityDocument5 pagesParallelism in Uniprocessor System and GranularityBravoYusuf100% (5)
- 8086 - PipeliningDocument3 pages8086 - PipeliningMovie DownloadNo ratings yet
- PipeliningDocument8 pagesPipeliningManoj Reddy GudaNo ratings yet
- Mit VliwDocument30 pagesMit VliwjahNo ratings yet
- Risc in Pipe IneDocument39 pagesRisc in Pipe IneNagarjuna ReddyNo ratings yet
- Pipeline and Vector ProcessingDocument18 pagesPipeline and Vector Processingnancy_01No ratings yet
- Chapt 02Document51 pagesChapt 02Kashif KhanNo ratings yet
- WINSEM2022-23 CSE4001 ETH VL2022230504003 Reference Material I 05-01-2023 M-2 2ILPDocument42 pagesWINSEM2022-23 CSE4001 ETH VL2022230504003 Reference Material I 05-01-2023 M-2 2ILPnehaNo ratings yet
- Floating Point ALU Design PDFDocument9 pagesFloating Point ALU Design PDFGorantala Anil KumarNo ratings yet
- Pipelinehazard For ClassDocument61 pagesPipelinehazard For ClassJayanta SikdarNo ratings yet
- Chapter 4 (Part II) The Processor: Datapath and Control: (Enhancing Performance With Pipelining)Document21 pagesChapter 4 (Part II) The Processor: Datapath and Control: (Enhancing Performance With Pipelining)許藝蓁No ratings yet
- Assembly Language For Intel-Based Computers, 4 Edition: Chapter 2: IA-32 Processor ArchitectureDocument9 pagesAssembly Language For Intel-Based Computers, 4 Edition: Chapter 2: IA-32 Processor ArchitecturehamzaNo ratings yet
- 6 Stage Pipelining ExplainedDocument4 pages6 Stage Pipelining ExplainedturbosreeNo ratings yet
- Pipelining Pipelining Characteristics of Pipelining Clocks and Latches 5 Stages of Pipelining Hazards Loads / Stores Risc and CiscDocument12 pagesPipelining Pipelining Characteristics of Pipelining Clocks and Latches 5 Stages of Pipelining Hazards Loads / Stores Risc and CiscKelvinNo ratings yet
- FPGA Design FinalDocument4 pagesFPGA Design Finaleta_orionis7415No ratings yet
- CPU Performance CPU Power Consumption.: Computers As Components 3e © 2012 Marilyn WolfDocument33 pagesCPU Performance CPU Power Consumption.: Computers As Components 3e © 2012 Marilyn WolfLordwin MichealNo ratings yet
- Instruction Pipeline Explained in 4 SegmentsDocument10 pagesInstruction Pipeline Explained in 4 SegmentsAnonymous 6Ts3r7dwNo ratings yet
- Pipelining Hazards and SolutionsDocument38 pagesPipelining Hazards and SolutionsHamza HassanNo ratings yet
- 8 WiiProfiler V3 0Document33 pages8 WiiProfiler V3 0Bejeweled LuigiGhostNo ratings yet
- Slides Chapter 6 PipeliningDocument60 pagesSlides Chapter 6 PipeliningWin WarNo ratings yet
- Sort Exit in COBOL Bok - 42096Document5 pagesSort Exit in COBOL Bok - 42096Murali Mohan NNo ratings yet
- Pipelining Basic and Intermediate ConceptsDocument75 pagesPipelining Basic and Intermediate Conceptsjoshi.prahaldNo ratings yet
- Unit-5 (Coa) NotesDocument33 pagesUnit-5 (Coa) NotesyashNo ratings yet
- Two Forms of Pipelining: - E.g., Floating Point OperationsDocument36 pagesTwo Forms of Pipelining: - E.g., Floating Point OperationsslogeshwariNo ratings yet
- Lecture 1 - Introduction To ARMDocument30 pagesLecture 1 - Introduction To ARMAnonymous JZSeM82IbVNo ratings yet
- Lecture 1Document10 pagesLecture 1Asim Arunava Sahoo100% (1)
- Unit 4 - P 2Document13 pagesUnit 4 - P 2Sanju SanjayNo ratings yet
- Statistics For 2016-2017Document64 pagesStatistics For 2016-2017prabhakrishnanNo ratings yet
- Simple C ProgsDocument11 pagesSimple C ProgsAnshuman KrishnakumarNo ratings yet
- Simple C ProgramsDocument64 pagesSimple C ProgramsprabhakrishnanNo ratings yet
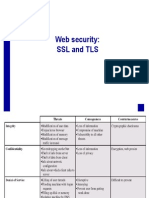
- Web SecurityDocument34 pagesWeb SecurityprabhakrishnanNo ratings yet
- Basic PgmsDocument36 pagesBasic PgmsprabhakrishnanNo ratings yet
- Basic PgmsDocument36 pagesBasic PgmsprabhakrishnanNo ratings yet
- EC GATE 2010: Q. No. 1 - 25 Carry One Mark EachDocument16 pagesEC GATE 2010: Q. No. 1 - 25 Carry One Mark EachprabhakrishnanNo ratings yet
- Aptitude Question: Cryptic Math Puzzle:: RulesDocument3 pagesAptitude Question: Cryptic Math Puzzle:: RulesprabhakrishnanNo ratings yet
- Cover LetterDocument1 pageCover LetterprabhakrishnanNo ratings yet
- EC GATE 2010: Q. No. 1 - 25 Carry One Mark EachDocument16 pagesEC GATE 2010: Q. No. 1 - 25 Carry One Mark EachprabhakrishnanNo ratings yet
- ArchitectureDocument28 pagesArchitectureprabhakrishnanNo ratings yet
- MB Manual Ga-z87x-Oc eDocument112 pagesMB Manual Ga-z87x-Oc eJOACOMANDONo ratings yet
- Open House PresentationDocument18 pagesOpen House PresentationArsalan AhmedNo ratings yet
- Digital Logic Design SyllubusDocument2 pagesDigital Logic Design Syllubuslokesh5701No ratings yet
- Electronics and Communication Department The Lnmiit, Jaipur Digital Circuits and Systems (Code: DCS)Document4 pagesElectronics and Communication Department The Lnmiit, Jaipur Digital Circuits and Systems (Code: DCS)Ravindra KumarNo ratings yet
- Dsa 105826 PDFDocument264 pagesDsa 105826 PDFmahmud0396No ratings yet
- Dell Vostro A840 A860 A1088 Quanta Vm9 Vm8 Rev 1a SCHDocument46 pagesDell Vostro A840 A860 A1088 Quanta Vm9 Vm8 Rev 1a SCHRodolfo ArosemenaNo ratings yet
- CN101046023A - Control System of Electronic Jacquard MachineDocument8 pagesCN101046023A - Control System of Electronic Jacquard Machineaniltejas61No ratings yet
- 8051 MicrocontrollerDocument31 pages8051 MicrocontrollerRadha RaniNo ratings yet
- Product data sheet for Modicon Quantum Unity HSBY processor with multimode EthernetDocument4 pagesProduct data sheet for Modicon Quantum Unity HSBY processor with multimode Ethernetdanipro773No ratings yet
- Automatic Waste (Metal and Non-Metal) Separation Using IR SensorDocument2 pagesAutomatic Waste (Metal and Non-Metal) Separation Using IR SensorJonas Dela PeñaNo ratings yet
- Advanced Computer Architecture SlidesDocument105 pagesAdvanced Computer Architecture SlidesShivansh JoshiNo ratings yet
- Microprocessors and Applications GuideDocument3 pagesMicroprocessors and Applications GuideImmanuel VinothNo ratings yet
- 4 Semester Syllabus BTECH - CSE - 13.03Document61 pages4 Semester Syllabus BTECH - CSE - 13.03Chandan productionNo ratings yet
- Jet Way J695as r0.1 SchematicsDocument23 pagesJet Way J695as r0.1 SchematicsGleison GomesNo ratings yet
- Chapter 1 Introduction To Computers - Computer LiteracyDocument80 pagesChapter 1 Introduction To Computers - Computer LiteracyNeggaz D MapeleNo ratings yet
- BCSL-022 Lab Manual Part 1Document9 pagesBCSL-022 Lab Manual Part 1Syed Shiyaz Mirza50% (2)
- 18 Processor ArchitecturesDocument8 pages18 Processor ArchitecturesSreejith KarunakaranpillaiNo ratings yet
- Computer Science Practical FileDocument19 pagesComputer Science Practical FileRaj VermaNo ratings yet
- Microprocessor Lab ManualDocument74 pagesMicroprocessor Lab ManualDhiraj IppiliNo ratings yet
- Dragon's Lair Dragon's Lair: The Troubleshooting ManualDocument31 pagesDragon's Lair Dragon's Lair: The Troubleshooting ManualFabian MoyanoNo ratings yet
- Kannur University Bca III Nov2019 Computer OrganizationDocument2 pagesKannur University Bca III Nov2019 Computer OrganizationneiceNo ratings yet
- STM32L431 DataSheet PDFDocument207 pagesSTM32L431 DataSheet PDFmgfdez01No ratings yet
- Historia de Los Controles Fanuc y Sus DrivesDocument2 pagesHistoria de Los Controles Fanuc y Sus Drivesjavier medinaNo ratings yet
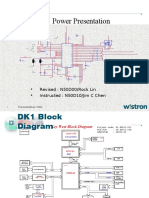
- DK1 Power PresentationDocument21 pagesDK1 Power PresentationSammy ModecaiNo ratings yet
- CW 50 Building Connections Architect Catalogue enDocument262 pagesCW 50 Building Connections Architect Catalogue enJaimasaNo ratings yet
- Design For Test: Digital Integrated Circuits © Prentice Hall 1995 Design MethodologiesDocument24 pagesDesign For Test: Digital Integrated Circuits © Prentice Hall 1995 Design Methodologiesanand_duraiswamyNo ratings yet
- Lock Up Latch in VLSIDocument8 pagesLock Up Latch in VLSIsandy_711100% (1)
- Hsslive-XI-CS Chap1-The Discipline of ComputingDocument3 pagesHsslive-XI-CS Chap1-The Discipline of ComputingSwetha AmmukuttyNo ratings yet
- Examination Based On RfidDocument62 pagesExamination Based On Rfidsudhakar5472100% (2)
- Lecture 3-4 Computer Organization and ArchitectureDocument7 pagesLecture 3-4 Computer Organization and Architectureshashank kumarNo ratings yet