You might also like
- Robot Programming TechniquesDocument32 pagesRobot Programming TechniquesDjuraTheHarpYNo ratings yet
- Robot Programming - PART1Document48 pagesRobot Programming - PART1Krushnasamy SuramaniyanNo ratings yet
- Robotics ProgrammingDocument32 pagesRobotics ProgrammingRahul HalderNo ratings yet
- Robot ProgrammingDocument130 pagesRobot ProgrammingVinayak Deshmukh100% (1)
- 5th ModuleDocument23 pages5th ModuleJayasmita DasNo ratings yet
- Robot Programming GuideDocument87 pagesRobot Programming GuideDheeraj RajNo ratings yet
- OIE 751 ROBOTICS Unit 4 Class 5 (20-10-2020)Document13 pagesOIE 751 ROBOTICS Unit 4 Class 5 (20-10-2020)MICHEL RAJNo ratings yet
- Robot Programming PDFDocument72 pagesRobot Programming PDFAswath Sridhar100% (2)
- Robot ProgrammingDocument12 pagesRobot ProgrammingRamkumar ANo ratings yet
- Robot Programming Languages: RAIL, AML, VAL, AL, RPLDocument8 pagesRobot Programming Languages: RAIL, AML, VAL, AL, RPLSheena BejasaNo ratings yet
- Robotics Programming and ApplicationsDocument35 pagesRobotics Programming and Applicationssuneel kumar rathoreNo ratings yet
- Robotics Programming and ApplicationsDocument38 pagesRobotics Programming and ApplicationsShanti Lal MeenaNo ratings yet
- Robot Programming LanguagesDocument22 pagesRobot Programming LanguagesD.Ezhil ArasanNo ratings yet
- Robot SimulationDocument13 pagesRobot SimulationAmeya VirkudNo ratings yet
- 5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyDocument6 pages5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyCh RajaNo ratings yet
- 6servo Robot Arm EngDocument18 pages6servo Robot Arm EngĐỗ ThànhNo ratings yet
- Robot Assist Users Manual PDFDocument80 pagesRobot Assist Users Manual PDFIvan AvramovNo ratings yet
- Industrial RoboticsDocument30 pagesIndustrial RoboticssoniyagoyalNo ratings yet
- Robot Programming MethodsDocument2 pagesRobot Programming MethodsJafash S. Ali100% (1)
- Introduction To Robotics: Analysis, Systems, ApplicationsDocument28 pagesIntroduction To Robotics: Analysis, Systems, ApplicationsFarhang NaderiNo ratings yet
- ROS-Introduction, ROS Graph ConceptsDocument21 pagesROS-Introduction, ROS Graph Conceptsmarco gilibertiNo ratings yet
- RoboAnalyzer 3D Model Based Robotics Learning Software User ManualDocument22 pagesRoboAnalyzer 3D Model Based Robotics Learning Software User ManualOscar AvilesNo ratings yet
- Robotics Course StructureDocument4 pagesRobotics Course StructurerohitNo ratings yet
- Robot and servo drives courseDocument2 pagesRobot and servo drives coursekarthik rajNo ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorUNsha bee komNo ratings yet
- IAE Robotics Course DescriptionDocument6 pagesIAE Robotics Course Descriptionsatheesh kumarNo ratings yet
- Robo Analyzer User ManualDocument20 pagesRobo Analyzer User ManualaustinvishalNo ratings yet
- Controlling Kuka Industrial Robots Flexible Communication Interface JopenshowvarDocument14 pagesControlling Kuka Industrial Robots Flexible Communication Interface JopenshowvarMihail AvramovNo ratings yet
- Denavit Hartenberg KinematicsDocument32 pagesDenavit Hartenberg KinematicshasdaNo ratings yet
- Module 02 - Robot KinematicsDocument46 pagesModule 02 - Robot KinematicsRisha AnurajNo ratings yet
- 00 Robotics Lec00Document14 pages00 Robotics Lec00Furkan KirmaciNo ratings yet
- Major Components of Industrial RobotsDocument8 pagesMajor Components of Industrial Robotsharikiran3285No ratings yet
- Project 1 - Robotic ArmDocument19 pagesProject 1 - Robotic ArmAizzat ZackNo ratings yet
- The Multi Purpose Painting Robot: FlexibilityDocument2 pagesThe Multi Purpose Painting Robot: FlexibilityGrahamNo ratings yet
- RoboticsDocument26 pagesRoboticsAyman Ahmed CheemaNo ratings yet
- Leap MotionDocument19 pagesLeap Motion46harmeetNo ratings yet
- Communication Interface To KUKA Robots PDFDocument6 pagesCommunication Interface To KUKA Robots PDFDinesh MehtaNo ratings yet
- ROBOTICSDocument99 pagesROBOTICSRutuja ParabNo ratings yet
- ForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFDocument11 pagesForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFAshar HaroonNo ratings yet
- Industrial Robotics: Robot Anatomy, Control, Programming & ApplicationsDocument30 pagesIndustrial Robotics: Robot Anatomy, Control, Programming & ApplicationsKiran VargheseNo ratings yet
- Oie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamceDocument48 pagesOie751 Robotics: Faculty Name K.Manikandan Associate Professor /mech A.HOD. MamcemaniNo ratings yet
- Robotics Lab Manuals Final PDFDocument38 pagesRobotics Lab Manuals Final PDFravihbti100% (1)
- Intro to Robotics History Types ApplicationsDocument11 pagesIntro to Robotics History Types ApplicationsSenthil KumarNo ratings yet
- RoboticsDocument37 pagesRobotics9944805552No ratings yet
- Robotic ArmDocument6 pagesRobotic ArmKunall KohliNo ratings yet
- Manipulator KinematicsDocument61 pagesManipulator KinematicsHoang Minh ThangNo ratings yet
- Robotics 06 DHDocument25 pagesRobotics 06 DHmodisuryaharshaNo ratings yet
- Abstract For Robotic ArmDocument4 pagesAbstract For Robotic ArmRounak VyasNo ratings yet
- Robotics Unit2Document8 pagesRobotics Unit2harikiran3285No ratings yet
- Experiment - 02: Denavit and Hartenberg (DH) ParametersDocument6 pagesExperiment - 02: Denavit and Hartenberg (DH) ParametersManthan SinghNo ratings yet
- Design and Implementation of a Low-Cost SCARA RobotDocument52 pagesDesign and Implementation of a Low-Cost SCARA RobotMustafaMir100% (2)
- Robotics TeachingPlan BoSE&TC KBCDocument2 pagesRobotics TeachingPlan BoSE&TC KBCvydeo100% (1)
- Experiment - 01: Denvit and Hartenberg (DH) ParametersDocument6 pagesExperiment - 01: Denvit and Hartenberg (DH) ParametersManthan SinghNo ratings yet
- Experiment - 5: AIM-To Study Forward KinematicsDocument7 pagesExperiment - 5: AIM-To Study Forward Kinematicsvarunmonga90No ratings yet
- Robot LanguagesDocument14 pagesRobot LanguagesGaurav GargNo ratings yet
- Robotics Chapter 6 - Robot ProgrammingDocument9 pagesRobotics Chapter 6 - Robot Programmingtutorfelix777No ratings yet
- FOC&DHDocument15 pagesFOC&DHOm AhujaNo ratings yet
- Industrial Robotics: Dr. M V A Raju BahubalendruniDocument20 pagesIndustrial Robotics: Dr. M V A Raju Bahubalendruniabdul rahmanNo ratings yet
- G4-1848Document14 pagesG4-1848Lam Bach (K18 HL)No ratings yet
- Programming Methods For Robots: Apurva Joshi M.Tech (RE)Document21 pagesProgramming Methods For Robots: Apurva Joshi M.Tech (RE)అయ్యలసోమయాజుల సాయి శివNo ratings yet
- Cisco Strategy: Concentrating On Software Platform Leadership Aggressive Acquisition TacticsDocument5 pagesCisco Strategy: Concentrating On Software Platform Leadership Aggressive Acquisition TacticsVarun SharmaNo ratings yet
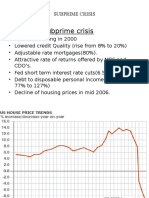
- Subprime Crisis 2008 Housing Bubble: USADocument59 pagesSubprime Crisis 2008 Housing Bubble: USAVarun SharmaNo ratings yet
- Brief History of Acquiring CompanyDocument13 pagesBrief History of Acquiring CompanyVarun SharmaNo ratings yet
- Price JustificationDocument1 pagePrice JustificationVarun SharmaNo ratings yet
- Job Sequencing With Deadline (Greedy Algorithm)Document1 pageJob Sequencing With Deadline (Greedy Algorithm)Varun SharmaNo ratings yet
- Causes of Subprime CrisisDocument4 pagesCauses of Subprime CrisisVarun SharmaNo ratings yet
- AigDocument31 pagesAigVarun SharmaNo ratings yet
- Merge SortDocument2 pagesMerge SortVarun SharmaNo ratings yet
- Project Quality ManagementDocument13 pagesProject Quality ManagementVarun SharmaNo ratings yet
- Srs For Attendance Management SystemDocument10 pagesSrs For Attendance Management SystemVarun Sharma89% (19)
- Research On How Demographic Factors Affect The EquityDocument13 pagesResearch On How Demographic Factors Affect The EquityVarun SharmaNo ratings yet
- Amber ToolsDocument309 pagesAmber ToolshkmydreamsNo ratings yet
- IPA Assignment Analyzes New Public AdministrationDocument8 pagesIPA Assignment Analyzes New Public AdministrationKumaran ViswanathanNo ratings yet
- Mock PPT 2023 TietDocument22 pagesMock PPT 2023 Tiettsai42zigNo ratings yet
- The Ethological Study of Glossifungites Ichnofacies in The Modern & Miocene Mahakam Delta, IndonesiaDocument4 pagesThe Ethological Study of Glossifungites Ichnofacies in The Modern & Miocene Mahakam Delta, IndonesiaEry Arifullah100% (1)
- Small Healthcare Organization: National Accreditation Board For Hospitals & Healthcare Providers (Nabh)Document20 pagesSmall Healthcare Organization: National Accreditation Board For Hospitals & Healthcare Providers (Nabh)Dipti PatilNo ratings yet
- Okto Engineering Experience ShareDocument66 pagesOkto Engineering Experience Sharecengiz kutukcuNo ratings yet
- Influence of Oxygen in Copper - 2010Document1 pageInfluence of Oxygen in Copper - 2010brunoNo ratings yet
- Senior Design Projects 201-2020 - For Website - MEDocument5 pagesSenior Design Projects 201-2020 - For Website - MEYujbvhujgNo ratings yet
- The Field: Health Services InformationDocument34 pagesThe Field: Health Services InformationRyan Michael Oducado100% (4)
- Measuring Algorithm Efficiency Using Time and Space ComplexityDocument8 pagesMeasuring Algorithm Efficiency Using Time and Space ComplexityGovind RathoreNo ratings yet
- Individual Moving Range (I-MR) Charts ExplainedDocument18 pagesIndividual Moving Range (I-MR) Charts ExplainedRam Ramanathan0% (1)
- Ninja's Guide To OnenoteDocument13 pagesNinja's Guide To Onenotesunil100% (1)
- E Requisition SystemDocument8 pagesE Requisition SystemWaNi AbidNo ratings yet
- An Introduction To Community DevelopmentDocument21 pagesAn Introduction To Community DevelopmentThuyAnh NgnNo ratings yet
- Action Plan On GadDocument1 pageAction Plan On GadCherish Devora ArtatesNo ratings yet
- 5 Grade - Lesson 1.3 Dissolving and Back Again: ObjectiveDocument4 pages5 Grade - Lesson 1.3 Dissolving and Back Again: ObjectiveManushka ThomasNo ratings yet
- Lesson Element Baron-Cohen Et Al. (1997) : Instructions and Answers For TeachersDocument10 pagesLesson Element Baron-Cohen Et Al. (1997) : Instructions and Answers For TeachersSyed SumaiyahNo ratings yet
- PrEN 12271-10 - Factory Production ControlDocument17 pagesPrEN 12271-10 - Factory Production ControlPedjaNo ratings yet
- Timothy Prehn CV 021209Document4 pagesTimothy Prehn CV 021209Jason GomezNo ratings yet
- Scedule Maintenance KBN Mill 2020Document9 pagesScedule Maintenance KBN Mill 2020slamet supriyadiNo ratings yet
- Final Term Quiz 2 On Cost of Production Report - Average CostingDocument4 pagesFinal Term Quiz 2 On Cost of Production Report - Average CostingYhenuel Josh LucasNo ratings yet
- Guimaras State CollegeDocument5 pagesGuimaras State CollegeBabarianCocBermejoNo ratings yet
- Packing, Transportation and Marketing of Ornamental FishesDocument16 pagesPacking, Transportation and Marketing of Ornamental Fishesraj kiranNo ratings yet
- 31 Legacy of Ancient Greece (Contributions)Document10 pages31 Legacy of Ancient Greece (Contributions)LyreNo ratings yet
- Running Head:: Describe The Uses of Waiting Line AnalysesDocument6 pagesRunning Head:: Describe The Uses of Waiting Line AnalysesHenry AnubiNo ratings yet
- Tithi PRAVESHADocument38 pagesTithi PRAVESHAdbbircs100% (1)
- Technology and Livelihood Education: Agri - Fishery Arts (Agricultural Crops Production) Marketing Agricultural ProductsDocument14 pagesTechnology and Livelihood Education: Agri - Fishery Arts (Agricultural Crops Production) Marketing Agricultural Productslana del rey100% (1)
- CROCI Focus Intellectual CapitalDocument35 pagesCROCI Focus Intellectual CapitalcarminatNo ratings yet
- Ziva RWW ManuscriptDocument3 pagesZiva RWW ManuscriptroderunnersdNo ratings yet
- Designers' Guide To Eurocode 7 Geothechnical DesignDocument213 pagesDesigners' Guide To Eurocode 7 Geothechnical DesignJoão Gamboias100% (9)