Professional Documents
Culture Documents
Transient Dynamic Analysis in Ansys
Uploaded by
Landon MitchellCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Transient Dynamic Analysis in Ansys
Uploaded by
Landon MitchellCopyright:
Available Formats
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 1 of 55
Chapter 5: Transient Dynamic Analysis
Go to the Next Chapter
Go to the Previous Chapter
Go to the Table of Contents for This Manual
Go to the Guides Master Index
Chapter 1 * Chapter 2 * Chapter 3 * Chapter 4 * Chapter 5 * Chapter 6 * Chapter 7 * Chapter 8 *
Chapter 9 * Chapter 10 * Chapter 11 * Chapter 12 * Chapter 13 * Chapter 14
5.1 Definition of Transient Dynamic Analysis
Transient dynamic analysis (sometimes called time-history analysis) is a technique used to determine
the dynamic response of a structure under the action of any general time-dependent loads. You can
use this type of analysis to determine the time-varying displacements, strains, stresses, and forces in a
structure as it responds to any combination of static, transient, and harmonic loads. The time scale of
the loading is such that the inertia or damping effects are considered to be important. If the inertia and
damping effects are not important, you might be able to use a static analysis instead (see Chapter 2).
The basic equation of motion solved by a transient dynamic analysis is
where:
[M] = mass matrix
[C] = damping matrix
[K] = stiffness matrix
= nodal acceleration vector
= nodal velocity vector
{u} = nodal displacement vector
{F(t)} = load vector
At any given time, t, these equations can be thought of as a set of "static" equilibrium equations that
also take into account inertia forces ([M] ) and damping forces ([C] ). The ANSYS program uses
the Newmark time integration method to solve these equations at discrete timepoints. The time
increment between successive timepoints is called the integration time step.
5.2 Commands Used in a Transient Dynamic
Analysis
You use the same set of commands to build a model and perform a transient dynamic analysis that
you use to do any other type of finite element analysis. Likewise, you choose similar options from the
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 2 of 55
Graphical User Interface (GUI) to build and solve models no matter what type of analysis you are
doing.
Section 5.8, "Sample Transient Dynamic Analysis (Command or Batch Method)," shows you the
sequence of commands you would issue (either manually or while running ANSYS as a batch job) to
perform an example transient dynamic analysis. Section 5.7, "Sample Transient Dynamic Analysis
(GUI Method)," shows you how to execute the same sample analysis using menu choices from the
ANSYS GUI. (To learn how to use the commands and GUI selections for building models, read the
ANSYS Modeling and Meshing Guide.)
For detailed, alphabetized descriptions of the ANSYS commands, see the ANSYS Commands
Reference.
5.3 Preparing for a Transient Dynamic Analysis
A transient dynamic analysis is more involved than a static analysis because it generally requires
more computer resources and more of your resources, in terms of the "engineering" time involved.
You can save a significant amount of these resources by doing some preliminary work to understand
the physics of the problem. For example, you can:
1. Analyze a simpler model first. A model of beams, masses, and springs can provide good insight
into the problem at minimal cost. This simpler model may be all you need to determine the dynamic
response of the structure.
2. If you are including nonlinearities, try to understand how they affect the structure's response by
doing a static analysis first. In some cases, nonlinearities need not be included in the dynamic
analysis.
3. Understand the dynamics of the problem. By doing a modal analysis, which calculates the natural
frequencies and mode shapes, you can learn how the structure responds when those modes are
excited. The natural frequencies are also useful for calculating the correct integration time step.
4. For a nonlinear problem, consider substructuring the linear portions of the model to reduce analysis
costs. Substructuring is described in the ANSYS Advanced Analysis Techniques Guide.
5.4 The Three Solution Methods
Three methods are available to do a transient dynamic analysis: full, reduced, and mode
superposition. The ANSYS/LinearPlus program allows only the mode superposition method. Before
we study the details of how to implement each of these methods, let's examine the advantages and
disadvantages of each.
5.4.1 The Full Method
The full method uses the full system matrices to calculate the transient response (no matrix reduction).
It is the most powerful of the three methods because it allows all types of nonlinearities to be included
(plasticity, large deflections, large strain, etc.).
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 3 of 55
Note-If you do not want to include any nonlinearities, you should consider using one of the other
methods because the full method is also the most expensive method of the three.
The advantages of the full method are:
It is easy to use, because you don't have to worry about choosing master degrees of freedom or
mode shapes.
It allows all types of nonlinearities.
It uses full matrices, so no mass matrix approximation is involved.
All displacements and stresses are calculated in a single pass.
It accepts all types of loads: nodal forces, imposed (non-zero) displacements (although not
recommended), and element loads (pressures and temperatures).
It allows effective use of solid-model loads.
The main disadvantage of the full method is that it is more expensive than either of the other methods.
5.4.2 The Reduced Method
The reduced method condenses the problem size by using master degrees of freedom and reduced
matrices. After the displacements at the master DOF have been calculated, ANSYS expands the
solution to the original full DOF set. (See Section 3.12, "Matrix Reduction," for a more detailed
discussion of the reduction procedure.) The advantages of the reduced method are:
It is faster and less expensive than the full method.
The disadvantages of the reduced method are:
The initial solution calculates only the displacements at the master DOF. A second step, known
as the expansion pass, is required for a complete displacement, stress and force solution.
(However, the expansion pass might not be needed for some applications.)
Element loads (pressures, temperatures, etc.) cannot be applied. Accelerations, however, are
allowed.
All loads must be applied at user-defined master degrees of freedom. (This limits the use of
solid-model loads.)
The time step must remain constant throughout the transient, so automatic time-stepping is not
allowed.
The only nonlinearity allowed is simple node-to-node contact (gap condition).
5.4.3 The Mode Superposition Method
The mode superposition method sums factored mode shapes (eigenvectors) from a modal analysis to
calculate the structure's response. This is the only method available in the ANSYS/LinearPlus
program. Its advantages are:
It is faster and less expensive than the reduced or the full method for many problems.
Element loads applied in the preceding modal analysis can be applied in the transient dynamic
analysis via the LVSCALE command.
It accepts modal damping (damping ratio as a function of mode number).
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 4 of 55
The disadvantages of the mode superposition method are:
The time step must remain constant throughout the transient, so automatic time-stepping is not
allowed.
The only nonlinearity allowed is simple node-to-node contact (gap condition).
It should not be used for a "floating" or disjoint structure.
When you are using PowerDynamics, initial conditions may not have previously-applied loads
or displacements. For further information, see Section 5.10.2.2, "Obtaining the Solution."
It does not accept imposed (non-zero) displacements.
5.5 How to Do a Transient Dynamic Analysis
We will first describe how to do a transient dynamic analysis using the full method. We will then list
the steps that are different for the reduced and mode superposition methods.
5.5.1 Full Transient Dynamic Analysis
The procedure for a full transient dynamic analysis (available in the ANSYS/Multiphysics,
ANSYS/Mechanical, and ANSYS/Structural products) consists of three main steps:
1. Build the model.
2. Apply loads and obtain the solution.
3. Review the results.
5.5.2 Build the Model
In this step, you specify the jobname and analysis title and then use PREP7 to define the element
types, element real constants, material properties, and the model geometry. These tasks are common
to most analyses. The ANSYS Modeling and Meshing Guide explains them in detail.
5.5.2.1 Points to Remember
You can use both linear and nonlinear elements.
Both Young's modulus (EX) (or stiffness in some form) and density (DENS) (or mass in some
form) must be defined. Material properties may be linear or nonlinear, isotropic or orthotropic,
and constant or temperature-dependent.
Some comments on mesh density:
The mesh should be fine enough to resolve the highest mode shape of interest.
Regions where stresses or strains are of interest require a relatively finer mesh than regions
where only displacements are of interest.
If you want to include nonlinearities, the mesh should be able to capture the effects of the
nonlinearities. For example, plasticity requires a reasonable integration point density (and
therefore a fine element mesh) in areas with high plastic deformation gradients.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 5 of 55
If you are interested in wave propagation effects (for example, a bar dropped exactly on its
end), the mesh should be fine enough to resolve the wave. A rule of thumb is to have at least 20
elements per wavelength along the direction of the wave.
5.5.3 Apply Loads and Obtain the Solution
In this step, you define the analysis type and options, apply loads, specify load step options, and
initiate the finite element solution. Details of how to do these tasks are explained below.
1. Enter the ANSYS solution processor.
Command(s):
/SOLU
GUI:
Main Menu>Solution
2. Define the analysis type and analysis options. ANSYS offers these options for a transient dynamic
analysis:
Table 5-1 Analysis types and analysis options
Option
Command GUI Path
New Analysis
ANTYPE Main Menu>Solution>-Analysis Type-New Analysis
Analysis Type:
Transient Dynamic
ANTYPE
Solution Method
TRNOPT Main Menu>Solution>Analysis Options
Mass Matrix
Formulation
LUMPM Main Menu>Solution>Analysis Options
Large Deformation
Effects
NLGEOM Main Menu>Solution>Analysis Options
Stress Stiffening
Effects
SSTIF
Main Menu>Solution>Analysis Options
Newton-Raphson
Option
NROPT
Main Menu>Solution>Analysis Options
Equation Solver
EQSLV
Main Menu>Solution>Analysis Options
Main Menu>Solution>-Analysis Type-New Analysis>
Transient Dynamic
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 6 of 55
Each of these options is explained in detail below.
5.5.3.1 Option: New Analysis [ANTYPE]
Choose new analysis. A restart is applicable if (a) you have previously completed a static prestress or
a full transient dynamic analysis and you want to extend the time-history, or (b) you want to restart a
failed nonlinear analysis. (The files Jobname.EMAT, Jobname.ESAV, and Jobname.DB from the
initial run must be available for the restart. Results will be appended to the initial results file
(Jobname.RST), if available.)
5.5.3.2 Option: Analysis Type [ANTYPE]
Choose Transient Dynamic.
5.5.3.3 Option: Solution Method [TRNOPT]
Choose full (default), reduced, or mode superposition method. The procedure for the reduced and
mode superposition methods is explained later in this chapter.
5.5.3.4 Option: Mass Matrix Formulation [LUMPM]
We recommend the default formulation for most applications. However, for some problems involving
"skinny" structures, such as slender beams or very thin shells, the lumped mass approximation might
provide better results. Also, the lumped mass approximation can result in a shorter run time and lower
memory requirements.
Default (which is element dependent)
Lumped Mass Approximation
To specify the remaining analysis options using the GUI, click OK in the Transient Analysis dialog
box.
5.5.3.5 Option: Large Deformation Effects [NLGEOM]
Choose ON only if you expect large deflections (as in the case of a long, slender bar under bending)
or large strains (as in a metal-forming problem). Large deflections and large strains are geometric
nonlinearities and are described in Chapter 8. By default, small deflections and small strains are
assumed.
5.5.3.6 Option: Stress Stiffening Effects [SSTIF]
Choose ON in the following situations (default is ON when NLGEOM and SOLCONTROL are
ON).
If, in a small deflection analysis, you expect the stress in the structure to significantly increase
(or decrease) its stiffness, such as a thin circular membrane under normal pressure.
If you need it to help convergence in a large deflection analysis.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 7 of 55
Stress stiffening is a geometric nonlinearity and is described in Chapter 8.
5.5.3.7 Option: Newton-Raphson Option [NROPT]
This option specifies how often the tangent matrix is updated during solution and is used only if
nonlinearities are present. Choose from the options listed below. See Chapter 8 for details.
Program-chosen (default)
Full
Modified
Initial Stiffness
5.5.3.8 Option: Equation Solver [EQSLV]
Specify one of these solvers:
Frontal solver (default for linear analysis)
Jacobi Conjugate Gradient (JCG) solver
JCG out-of-memory solver
Incomplete Cholesky Conjugate Gradient (ICCG) solver
Preconditioned Conjugate Gradient (PCG) solver
PCG out-of-memory solver
Iterative (auto-select; for linear static/full transient structural or steady-state/transient thermal
analyses only) (recommended)
Sparse (SPAR) solver (default for nonlinear analysis when SOLCONTROL is ON)
For large models (high wavefronts), we recommend the PCG solver.
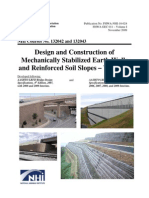
3. Apply loads on the model.
A transient analysis, by definition, involves loads that are functions of time. To specify such
loads, you need to divide the load-versus-time curve into suitable load steps. Each "corner" on
the load-time curve may be one load step, as shown in Figure 5-1.
Figure 5-1 Examples of load-versus-time curves
The first load step you apply is usually to establish initial conditions. You then specify the loads
and load step options for the subsequent transient load steps. For each load step, you need to
specify both load values and time values, along with other load step options such as whether to
step or ramp the loads, use automatic time stepping, etc. You then write each load step to a file
and solve all load steps together.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 8 of 55
Apply Initial Conditions
The first step in applying transient loads is to establish initial conditions (that is, the condition
at Time = 0). A transient dynamic analysis requires two sets of initial conditions (because the
equations being solved are of second order): initial displacement ( ) and initial velocity ( ). If
no special action is taken, both and are assumed to be zero.
) are
always assumed to be zero, but you can specify nonzero initial accelerations by applying
appropriate acceleration loads over a small time interval.
The following paragraphs describe how to apply different combinations of initial conditions.
Zero initial displacement and zero initial velocity-These are the default conditions, that is, if
= = 0, you don't need to specify anything. You may apply the loads corresponding to the first
corner of the load-versus-time curve in the first load step.
Nonzero initial displacement and/or nonzero initial velocity-You can set these initial conditions
with the IC command.
Command(s):
IC
GUI:
Main Menu>Solution>-Loads-Apply>Initial Condit'n>Define
Caution: Be careful not to define inconsistent initial conditions. For instance, if you define an
initial velocity at a single DOF, the initial velocity at every other DOF will be 0.0, potentially
leading to conflicting initial conditions. In most cases, you will want to define initial conditions
at every unconstrained DOF in your model. If these conditions are not the same at every DOF,
it is usually much easier to define initial conditions explicitly, as documented below.
See the ANSYS Commands Reference for a discussion of the TIMINT and IC commands.
Zero initial displacement and nonzero initial velocity-The nonzero velocity is established by
applying small displacements over a small time interval on the part of the structure where
velocity is to be specified. For example if = 0.25, you can apply a displacement of 0.001 over
a time interval of 0.004, as shown below.
...
TIMINT,OFF
D,ALL,UY,.001
TIME,.004
LSWRITE ! Write
DDEL,ALL,UY
TIMINT,ON
...
! Time integration effects off
! Small UY displ. (assuming Y-direction velocity)
! Initial velocity = 0.001/0.004 = 0.25
load data to load step file (Jobname.S01)
! Remove imposed displacements
! Time integration effects on
Nonzero initial displacement and nonzero initial velocity-This is similar to the above case,
except that the imposed displacements are actual values instead of "small" values. For example,
if = 1.0 and = 2.5, you would apply a displacement of 1.0 over a time interval of 0.4:
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 9 of 55
...
TIMINT,OFF
! Time integration effects off
D,ALL,UY,1.0
! Initial displacement = 1.0
TIME,.4 ! Initial velocity = 1.0/0.4 = 2.5
LSWRITE ! Write load data to load step file (Jobname.S01)
DDELE,ALL,UY
! Remove imposed displacements
TIMINT,ON
! Time integration effects on
...
Nonzero initial displacement and zero initial velocity-This requires the use of two substeps
[NSUBST,2] with a step change in imposed displacements [KBC,1]. Without the step change
(or with just one substep), the imposed displacements would vary directly with time, leading to
a nonzero initial velocity. The example below shows how to apply = 1.0 and = 0.0:
...
TIMINT,OFF
! Time integration effects off for static solution
D,ALL,UY,1.0
! Initial displacement = 1.0
TIME,.001
! Small time interval
NSUBST,2
! Two substeps
KBC,1
! Stepped loads
LSWRITE ! Write load data to load step file (Jobname.S01)
! Transient solution
TIMINT,ON
! Time-integration effects on for transient solution
TIME,...
! Realistic time interval
DDELE,ALL,UY
! Remove displacement constraints
KBC,0
! Ramped loads (if appropriate)
! Continue with normal transient solution procedures
...
Nonzero initial acceleration-This can be approximated by specifying the required acceleration
[ACEL] over a small interval of time. For example, the commands to apply an initial
acceleration of 9.81 would look like this:
...
ACEL,,9.81
! Initial Y-direction acceleration
TIME,.001
! Small time interval
NSUBST,2
! Two substeps
KBC,1
! Stepped loads
LSWRITE
! Write load data to load step file (Jobname.S01)
! Transient solution
TIME,...
! Realistic time interval
DDELE,...
! Remove displacement constraints (if appropriate)
KBC,0
! Ramped loads (if appropriate)
! Continue with normal transient solution procedures
...
See the ANSYS Commands Reference for a discussion of the ACEL, TIME, NSUBST, KBC,
LSWRITE, DDELE and KBC commands.
Apply Loads for the Transient Loading Portion
Table 5-2 summarizes the loads applicable to a transient dynamic analysis. Except for inertia loads,
you can define loads either on the solid model (keypoints, lines, and areas) or on the finite element
model (nodes and elements). For a general discussion of solid-model loads versus finite-element
loads, see Chapter 2 of the ANSYS Basic Analysis Procedures Guide.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 10 of 55
You can also apply complex boundary conditions by defining a 1-dimensional table (TABLE type
array parameter). See "Applying Loads Using TABLE Type Array Parameters" in Section 2.5.2.3.
Table 5-2 Loads applicable in a transient dynamic analysis
Cmd
Family
Load Type
Category
Displacement (UX, UY, UZ,
ROTX, ROTY, ROTZ)
Constraints D
Force, Moment (FX, FY, FZ,
Forces
MX, MY, MZ)
GUI Path
Main Menu>Solution>-LoadsApply>-Structural- Displacement
Main Menu>Solution>-LoadsApply>-Structural- Force/Moment
SF
Main Menu>Solution>-LoadsApply>-Structural- Pressure
Pressure (PRES)
Surface
Loads
Temperature (TEMP)
Fluence (FLUE)
Moisture Content (MSCN)
Body Loads BF
Main Menu>Solution>-LoadsApply>-Structural- Temperature
Gravity, Spinning, etc.
Inertia
Loads
Main Menu>Solution>-LoadsApply>-Structural- Other
In an analysis, loads can be applied, removed, operated on, or listed.
5.5.3.9 Applying Loads Using Commands
Table 5-3 lists all the commands you can use to apply loads in a transient dynamic analysis.
Table 5-3 Load commands for a transient dynamic analysis
Load Type
Solid
Model Entity
or FE
Displacement
Solid
Keypoints DK
Model
DKDELE DKLIST DTRAN
Solid
Lines
Model
DL
DLDELE DLLIST DTRAN
Solid
Areas
Model
DA
DADELE DALIST DTRAN
DDELE
Finite
Elem
Nodes
Apply
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
Delete
List
DLIST
Operate
Apply
Settings
DSCALE DSYM
DCUM
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 11 of 55
Solid
Keypoints FK
Model
FKDELE FKLIST FTRAN
Finite
Elem
FDELE
Solid
Lines
Model
SFL
SFLDELE SFLLIST SFTRAN SFGRAD
Solid
Areas
Model
SFA
SFADELE SFALIST SFTRAN SFGRAD
Finite
Elem
SF
SFDELE
Force
Pressure
Finite
Elem
Temperature
Fluence
Inertia
Nodes
Nodes
Elements SFE
FLIST
SFLIST
FSCALE FCUM
SFSCALE
SFGRAD
SFCUM
SFGRAD
SFBEAM
SFEDELE SFELIST SFSCALE
SFFUN
SFCUM
Solid
Keypoints BFK
Model
BFKDELE BFKLIST BFTRAN -
Solid
Lines
Model
BFL
BFLDELE BFLLIST BFTRAN -
Solid
Areas
Model
BFA
BFADELE BFALIST BFTRAN -
Solid
Volumes BFV
Model
BFVDELE BFVLIST BFTRAN -
Finite
Elem
Nodes
BFDELE
Finite
Elem
Elements BFE
BF
BFSCALE BFCUM
BFEDELE BFELIST BFSCALE BFCUM
ACEL
OMEGA
DOMEGA
CGLOC
CGOMGA
DCGOM IRLF
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
BFLIST
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 12 of 55
5.5.3.10 Applying Loads Using the GUI
All loading operations (except List; see below) are accessed through a series of cascading
menus. From the Solution menu, you select the operation (apply, delete, etc.), then the load type
(displacement, force, etc.), and then the object to which you are applying the load (keypoint,
line, node, etc.).
For example, to apply a displacement load to a line, follow this GUI path:
GUI:
Main Menu>Solution>-Loads-Apply>-Structural-Displacement>On lines
5.5.3.11 Listing Loads
To list existing loads, follow this GUI path:
GUI:
Utility Menu>List>Loads>load type
Applying Load Steps for the Transient Loading Portion
The following load step options are available for a transient dynamic analysis:
Table 5-4 Load step options for a transient dynamic analysis
Option
Command
GUI Path
TIMINT
Main Menu>Solution>-Load Step OptsTime/Frequenc>Time Integration
Dynamics Options
Time Integration
Effects
Transient Integration
TINTP
Parameters
Damping
Main Menu>Solution>-Load Step OptsTime/Frequenc>Time Integration
ALPHAD BETAD Main Menu>Solution>-Load Step OptsMP, DAMP
Time/Frequenc> Damping
General Options
Time
TIME
Stepped or Ramped
Loads
KBC
Main Menu>Solution>-Load Step OptsTime/Frequenc>Time & Time Step or Time &
Substeps
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 13 of 55
Main Menu>Solution>-Load Step OptsTime/Frequenc>Time & Time Step or Time &
Substeps
Integration Time Step
Automatic Time
Stepping
NSUBST
DELTIM
Main Menu>Solution>-Load Step OptsTime/Frequenc>Time & Substeps or Time & Time
Step
AUTOTS
Main Menu>Solution>-Load Step OptsTime/Frequenc>Time & Substeps or Time & Time
Step
Nonlinear Options
Max. No. of
NEQIT
Equilibrium Iterations
Main Menu>Solution>-Load Step Opts-Nonlinear>
Equilibrium Iter
Convergence
Tolerances
CNVTOL
Main Menu>Solution>-Load Step Opts-Nonlinear>
Convergence Crit
Predictor-Corrector
Option
PRED
Main Menu>Solution>-Load Step Opts-Nonlinear>
Predictor
Line Search Option
LNSRCH
Main Menu>Solution>-Load Step Opts-Nonlinear>
Line Search
Creep Criteria
CRPLIM
Main Menu>Solution>-Load Step Opts-Nonlinear>
Creep Criterion
Solution Termination
NCNV
Options
Main Menu>Solution>-Load Step Opts-Nonlinear>
Criteria to Stop
Output Control Options
Printed Output
OUTPR
Main Menu>Solution>-Load Step Opts-Output
Ctrls> Solu Printout
Database and Results
OUTRES
File Output
Main Menu>Solution>-Load Step Opts-Output
Ctrls> DB/ Results File
Extrapolation of
Results
Main Menu>Solution>-Load Step Opts-Output
Ctrls> Integration Pt
ERESX
5.5.3.12 Dynamics Options
Dynamic options include the following:
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 14 of 55
Time Integration Effects [TIMINT]
Time integration effects must be turned on for inertia and damping effects to be included in the
analysis (otherwise a static solution is performed). The default is to include time integration
effects. This option is useful to begin a transient from an initial static solution; that is, the first
load steps are solved with the time integration effects off.
Transient Integration Parameters [TINTP]
Transient integration parameters control the nature of the Newmark time integration technique.
The default is to use the constant average acceleration scheme; see your ANSYS Theory
Reference for further details.
Damping
Damping in some form is present in most structures and should be included in your analysis.
You can specify four forms of damping in a full transient dynamic analysis:
Alpha (mass) damping [ALPHAD]
Beta (stiffness) damping [BETAD]
Material-dependent beta damping [MP,DAMP]
Element damping (COMBIN7, etc.)
See Section 5.12.3, "Damping," later in this chapter for further details.
5.5.3.13 General Options
General options include the following:
Time [TIME]
This option specifies time at the end of the load step.
Stepped or Ramped Loads [KBC]
This option indicates whether to ramp the load change over the load step [KBC] or to stepapply the load change [KBC,1]. The default is ramped for static analysis and stepped for full
transient analysis when SOLCONTROL is ON.
Integration Time Step [DELTIM or NSUBST]
The integration time step is the time increment used in the time integration of the equations of
motion. You can specify it directly [DELTIM] or indirectly, in terms of the number of substeps
[NSUBST]. The time step size determines the accuracy of the solution: the smaller its value,
the higher the accuracy. You should consider several factors in order to calculate a "good"
integration time step; see Section 5.12.1, "Guidelines for Integration Time Step," for details.
Automatic Time Stepping [AUTOTS]
This option, also known as time-step optimization in a transient analysis, increases or decreases
the integration time step based on the response of the structure. For most problems, we
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 15 of 55
recommend that you turn on automatic time stepping, with upper and lower limits for the
integration time step. These limits, specified using DELTIM or NSUBST, help to limit the
range of variation of the time step; see Section 5.12.2, "Automatic Time Stepping" for more
information. The default is ON when SOLCONTROL is ON. Otherwise, it is OFF.
5.5.3.14 Nonlinear Options
Nonlinear options are used only if nonlinearities are present (plasticity, contact elements, creep, etc.)
and include the following:
Maximum Number of Equilibrium Iterations [NEQIT]
Convergence Tolerances [CNVTOL]
Predictor-Corrector Option [PRED]
Line Search Option [LNSRCH]
Creep Criteria [CRPLIM]
Solution Termination Options [NCNV]
For more details, see Chapter 8.
5.5.3.15 Output Control Options
Output control options include the following:
Printed Output [OUTPR]
Use this option to include any results data on the output file (Jobname.OUT).
Database and Results File Output [OUTRES]
This option controls the data on the results file (Jobname.RST); see caution below.
Extrapolation of Results [ERESX]
Use this option to review element integration point results by copying them to the nodes instead
of extrapolating them (default).
Caution: By default, only the last substep (time-point) is written to the results file in a full transient
dynamic analysis. To write all substeps, set the FREQ field on the OUTRES command to ALL. Also,
a maximum of 1000 substeps are written to the results file by default. Use the
command /CONFIG,NRES to increase the limit (see Chapter 19, "Memory Management and
Configuration," of the ANSYS Basic Analysis Procedures Guide).
Caution: Proper use of multiple OUTRES or OUTPR commands can sometimes be a little tricky.
See Section 2.7.4, "Output Controls," of the ANSYS Basic Analysis Procedures Guide for more
information on how to use these commands.
An example load step file is shown below:
TIME,...
Loads ...
KBC,...
! Time at the end of 1st transient load step
! Load values at above time
! Stepped or ramped loads
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
LSWRITE
TIME,...
Loads ...
KBC,...
LSWRITE
TIME,...
Loads ...
KBC,...
LSWRITE
Etc.
!
!
!
!
!
!
!
!
!
Page 16 of 55
Write load data to load step file
Time at the end of 2nd transient load step
Load values at above time
Stepped or ramped loads
Write load data to load step file
Time at the end of 3rd transient load step
Load values at above time
Stepped or ramped loads
Write load data to load step file
See the ANSYS Commands Reference for a discussion of the TIME, KBC and LSWRITE
commands.
4. Save the load configuration for this step to the load step file.
Command(s):
LSWRITE
GUI:
Main Menu>Solution>Write LS File
Repeat steps 3. and 4 for each corner of the load-versus-time curve. You may also want to have
an additional load step that extends past the last time point on the curve to capture the response
of the structure after the transient loading.
5. Save a back-up copy of the database to a named file. You can then retrieve your model by reentering the ANSYS program and issuing RESUME.
Command(s):
SAVE
GUI:
Utility Menu>File>Save as
6. Start the transient solution. For additional ways to create and solve multiple load steps (the array
parameter method and the multiple SOLVE method), see Section 3.10 of the ANSYS Basic Analysis
Procedures Guide.
Command(s):
LSSOLVE
GUI:
Main Menu>Solution>-Solve-From LS Files
7. Leave SOLUTION.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 17 of 55
Command(s):
FINISH
GUI:
Close the Solution menu.
5.5.4 Review the Results
Results from a transient dynamic analysis are written to the structural results file, Jobname.RST. They
consist of the following data, all of which are functions of time:
Primary data
Nodal displacements (UX, UY, UZ, ROTX, ROTY, ROTZ)
Derived data:
Nodal and element stresses
Nodal and element strains
Element forces
Nodal reaction forces
etc.
5.5.4.1 Postprocessors
You can review these results using either POST26, the time-history postprocessor, or POST1, the
general postprocessor.
POST26 is used to review results at specific points in the model as functions of time.
POST1 is used to review results over the entire model at specific time-points.
Some typical postprocessing operations for a transient dynamic analysis are explained below. For a
complete description of all postprocessing functions, see Section 4.1 of the ANSYS Basic Analysis
Procedures Guide.
5.5.4.2 Points to Remember
To review results in POST26 or POST1, the database must contain the same model for which
the solution was calculated (issue RESUME if necessary).
The results file (Jobname.RST) must be available.
5.5.4.3 Using POST26
POST26 works with tables of result item versus time, known as variables. Each variable is assigned a
reference number, with variable number 1 reserved for time.
1. Define the variables.
Command(s):
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 18 of 55
NSOL (primary data, that is, nodal displacements)
ESOL (derived data, that is, element solution data, such as stresses)
RFORCE (reaction force data)
FORCE (total force, or static, damping, or inertia component of total force)
SOLU (time step size, number of equilibrium iterations, response frequency, etc.)
GUI:
Main Menu>TimeHist Postpro>Define Variables
Note-In the reduced or mode superposition methods, only static force is available with the
FORCE command.
2. Graph or list the variables. By reviewing the time-history results at strategic points throughout the
model, you can identify the critical time-points for further POST1 postprocessing.
Command(s):
PLVAR (graph variables)
PRVAR, EXTREM (list variables)
GUI:
Main Menu>TimeHist Postpro>Graph Variables
Main Menu>TimeHist Postpro>List Variables
Main Menu>TimeHist Postpro>List Extremes
5.5.4.4 Other Capabilities
Many other postprocessing functions, such as performing math operations among variables, moving
variables into array parameters, and moving array parameters into variables, are available in POST26.
See Chapter 6 of the ANSYS Basic Analysis Procedures Guide for details.
5.5.4.5 Using POST1
1. Read in model data from the database file.
Command(s):
RESUME
GUI:
Utility Menu>File>Resume from
2. Read in the desired set of results. Use the SET command to identify the data set by load step and
substep numbers or by time.
Command(s):
SET
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 19 of 55
GUI:
Main Menu>General Postproc>-Read Results-By Time/Freq
Note-If you specify a time for which no results are available, the results that are stored will be a
linear interpolation between the two nearest time points.
3. Perform the necessary POST1 operations. Typical POST1 operations are explained below.
5.5.4.6 Option: Display Deformed Shape
Command(s):
PLDISP
GUI:
Main Menu>General Postproc>Plot Results>Deformed Shape
The KUND field on PLDISP gives you the option of overlaying the undeformed shape on the
display.
5.5.4.7 Option: List Reaction Forces and Moments
Command(s):
PRRSOL
GUI:
Main Menu>General Postproc>List Results>Reaction Solu
The PRRSOL command lists reaction forces and moments at the constrained nodes.
To display reaction forces, issue /PBC,RFOR,,1 and then request a node or element display
[NPLOT or EPLOT]. (Use RMOM instead of RFOR for reaction moments.)
5.5.4.8 Option: List Nodal Forces and Moments
Command(s):
PRESOL,F (or M)
GUI:
Main Menu>General Postproc>List Results>Element Solution
You can list the sum of all nodal forces and moments for a selected set of nodes. Select a set of
nodes and use this feature to find out the total force acting on those nodes:
Command(s):
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 20 of 55
FSUM
GUI:
Main Menu>General Postproc>Nodal Calcs>Total Force Sum
You can also check the total force and total moment at each selected node. For a body in
equilibrium, the total load is zero at all nodes except where an applied load or reaction load
exists.
Command(s):
NFORCE
GUI:
Main Menu>General Postproc>Nodal Calcs>Sum @ Each Node
The FORCE command (Main Menu>General Postproc>Options for Outp) dictates which
component of the forces is being reviewed:
Total (default)
Static component
Damping component
Inertia component
For a body in equilibrium, the total load (using all FORCE components) is zero at all nodes
except where an applied load or reaction load exists.
5.5.4.9 Option: Line Element Results
Command(s):
ETABLE
GUI:
Main Menu>General Postproc>Element Table>Define Table
For line elements, such as beams, spars, and pipes, use this option to gain access to derived data
(stresses, strains, etc.). Results data are identified by a combination of a label and a sequence
number or component name on the ETABLE command. See Section 5.2.3, "Creating an
Element Table," in the ANSYS Basic Analysis Procedures Guide for details.
5.5.4.10 Option: Print Error Estimation
Command(s):
PRERR
GUI:
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 21 of 55
Main Menu>General Postproc>List Results>Percent Error
For linear static analyses using solid or shell elements, use the PRERR command to list the
estimated solution error due to mesh discretization. This command calculates and lists the
percent error in structural energy norm (SEPC), which represents the error relative to a
particular mesh discretization.
5.5.4.11 Option: Display Contour of Error Estimation
Command(s):
PLESOL,SERR
GUI:
Main Menu>General Postproc>Plot Results>-Contour Plot-Element Solu
Use PLESOL,SERR to contour the element-by-element structural energy error (SERR).
Regions of high SERR on the contour display are good candidates for mesh refinement. See
Section 5.3.5, "Estimating Solution Error," in the ANSYS Basic Analysis Procedures Guide for
more details about error estimation.
5.5.4.12 Option: Contour Displays
Command(s):
PLNSOL or PLESOL
GUI:
Main Menu>General Postproc>Plot Results>-Contour Plot-Nodal Solu or Element Solu
Use these options to contour almost any result item, such as stresses (SX, SY, SZ...), strains
(EPELX, EPELY, EPELZ...), and displacements (UX, UY, UZ...).
The KUND field on PLNSOL and PLESOL gives you the option of overlaying the
undeformed shape on the display.
You can also contour element table data and line element data:
Command(s):
PLETAB, PLLS
GUI:
Main Menu>General Postproc>Element Table>Plot Element Table
Main Menu>General Postproc>Plot Results>-Contour Plot-Line Elem Res
Caution: Derived data, such as stresses and strains, are averaged at the nodes by the PLNSOL
command. This averaging results in "smeared" values at nodes where elements of different materials,
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 22 of 55
different shell thicknesses, or other discontinuities meet. To avoid the smearing effect, use selecting
(described in Chapter 7 of the ANSYS Basic Analysis Procedures Guide) to select elements of the
same material, same shell thickness, etc. before issuing PLNSOL. Alternatively, use PowerGraphics
with the AVRES command (Main Menu>General Postproc>Options for Outp) to not average
results across different materials and/or different shell thicknesses.
5.5.4.13 Option: Vector Displays
Command(s):
PLVECT (vector displays), PRVECT (vector listings)
GUI:
Main Menu>General Postproc>Plot Results>-Vector Plot-Predefined
Main Menu>General Postproc>List Results>Vector Data
Vector displays (not to be confused with vector mode) are an effective way of viewing vector
quantities, such as displacement (DISP), rotation (ROT), and principal stresses (S1, S2, S3).
5.5.4.14 Option: Tabular Listings
Command(s):
PRNSOL (nodal results)
PRESOL (element-by-element results)
PRRSOL (reaction data), etc.
NSORT, ESORT
GUI:
Main Menu>General Postproc>List Results>solution option
Main Menu>General Postproc>List Results>-Sorted Listting-Sort Nodes or Sort Elems
Use the NSORT and ESORT commands to sort the data before listing them.
5.5.4.15 Other Capabilities
Many other postprocessing functions-mapping results onto a path, load case combinations, etc.-are
available in POST1. See Chapter 5 of the ANSYS Basic Analysis Procedures Guide for details.
5.5.5 Sample Input
A sample input listing for a full transient analysis is shown below:
! Build the Model
/FILNAM,...
! Jobname
/TITLE,...
! Title
/PREP7
! Enter PREP7
---
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
----FINISH
Page 23 of 55
! Generate model
! Apply Loads and Obtain the Solution
/SOLU
! Enter SOLUTION
ANTYPE,TRANS
! Transient analysis
TRNOPT,FULL
! Full method
D,...
! Constraints
F,...
! Loads
SF,...
ALPHAD,...
! Mass damping
BETAD,...
! Stiffness damping
KBC,...
! Ramped or stepped loads
TIME,...
! Time at end of load step
AUTOTS,ON
! Auto time stepping
DELTIM,...
! Time step size
OUTRES,...
! Results file data options
LSWRITE
! Write first load step
----! Loads, time, etc. for 2nd load step
--LSWRITE
! Write 2nd load step
SAVE
LSSOLVE,1,2
! Initiate multiple load step solution
FINISH
!
! Review the Results
/POST26
SOLU,...
! Store solution summary data
NSOL,...
! Store nodal result as a variable
ESOL,,,,
! Store element result as a variable
RFORCE,...
! Store reaction as a variable
PLVAR,...
! Plot variables
PRVAR,...
! List variables
FINISH
/POST1
SET,...
PLDISP,...
PRRSOL,...
PLNSOL,...
PRERR
------FINISH
! Read desired set of results into database
! Deformed shape
! Reaction loads
! Contour plot of nodal results
! Global percent error (a measure of mesh adequacy)
! Other postprocessing as desired
See the ANSYS Commands Reference for a discussion of the ANTYPE, TRNOPT, ALPHAD,
BETAD, KBC, TIME, AUTOTS, DELTIM, OUTRES, LSWRITE, LSSOLVE, SOLU, NSOL,
ESOL, RFORCE, PLVAR, PRVAR, PLDISP, PRRSOL, PLNSOL and PRERR commands.
5.6 Reduced Transient Dynamic Analysis
The reduced method, as its name implies, uses reduced matrices to calculate the dynamic response. It
is available in the ANSYS/Multiphysics, ANSYS/Mechanical, and ANSYS/Structural products. You
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 24 of 55
should consider using this method if you don't want to include nonlinearities (other than simple nodeto-node contact) in the analysis.
The procedure for a reduced transient dynamic analysis consists of five main steps:
1. Build the model.
2. Obtain the reduced solution.
3. Review the results of the reduced solution.
4. Expand the solution (expansion pass).
5. Review the results of the expanded solution.
Of these, the first step is the same as for the full method, except that no nonlinearities are allowed
(other than simple node-to-node contact, which is specified in the form of a gap condition instead of
an element type). Details of the other steps are explained below.
5.6.1 Obtain the Reduced Solution
By reduced solution, we mean the degree of freedom solution calculated at the master DOF. The tasks
required to obtain the reduced solution are as follows:
1. Enter SOLUTION.
Command(s):
/SOLU
GUI:
Main Menu>Solution
2. Define the analysis type and analysis options. These are the same as described for the full method
except for the following differences:
Choose the reduced method of solution [TRNOPT].
Nonlinear options [NLGEOM, SSTIF, NROPT] are not available.
You may include prestress effects [PSTRES]. This requires element files from a previous static
(or transient) analysis; see Section 5.11,"Prestressed Transient Dynamic Analysis," for details.
Restarts are not available [ANTYPE].
3. Define master degrees of freedom. Master DOF are essential degrees of freedom that characterize
the dynamic behavior of the structure. For a reduced transient dynamic analysis, master DOF are also
required at locations where you want to define gap conditions, forces, or non-zero displacements. You
can list the defined master DOF or delete master DOF as well. See Section 3.12, "Matrix Reduction"
for guidelines to choose master DOF.
Command(s):
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 25 of 55
M
MGEN
TOTAL
MLIST
MDELE
GUI:
Main Menu>Solution>Master DOFs>Define/Copy/Program Selected
Main Menu>Solution>Master DOF>List All
Main Menu>Solution>Master DOFs>Delete
4. Define gap conditions, if any.
Command(s):
GP
GUI:
Main Menu>Solution>Dynamic Gap Cond>Define
You can also list the defined gaps and delete gaps.
Command(s):
GPLIST
GPDELE
GUI:
Main Menu>Solutions>Dynamic Gap Cond>List All
Main Menu>Solutions>Dynamic Gap Cond>Delete
Gap Conditions
Gap conditions can only be defined between two master nodes or between master nodes and
ground, as shown in the following figure.
Figure 5-2 Examples of gap conditions
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 26 of 55
Gap conditions are similar to gap elements and are specified between surfaces that are expected
to contact (impact) each other during the transient. The ANSYS program accounts for the gap
force, which develops when the gap closes, by using an equivalent nodal load vector.
Some guidelines to define gap conditions are presented below:
Use enough gap conditions to obtain a smooth contact stress distribution between the contacting
surfaces.
Define a reasonable gap stiffness. If the stiffness is too low, the contacting surfaces may
overlap too much. If the stiffness is too high, a very small time step will be required during
impact. A general recommendation is to specify a gap stiffness that is one or two orders of
magnitude higher than the adjacent element stiffness. You can estimate the adjacent element
stiffness using AE/L, where A is the contributing area around the gap condition, E is the elastic
modulus of the softer material at the interface, and L is the depth of the first layer of elements at
the interface.
5. Apply initial conditions to the model. The following loading restrictions apply in a reduced
transient dynamic analysis:
Only displacements, forces, and translational accelerations (such as gravity) are valid.
Acceleration loading is not allowed if the model contains any master DOF at any nodes with
rotated nodal coordinate systems.
Forces and non-zero displacements must be applied only at master DOF.
As mentioned for the full method, multiple load steps are usually required to specify the load
history in a transient analysis. The first load step is used to establish initial conditions, and
second and subsequent load steps are used for the transient loading, as explained next.
Establish initial conditions. The only initial condition that may be explicitly established is the
initial displacement ( ); that is, initial velocity and acceleration must be zero ( = 0, = 0).
Displacements cannot be deleted in subsequent load steps, therefore they cannot be used to
specify an initial velocity. In a reduced transient analysis, a static solution is always performed
as the first solution, using the loads given, to determine .
Specify load step options for the first load step. The following options are available for the first
load step.
Table 5-5 Options for the first load step
Option
Command GUI Path
Dynamics Options
Transient Integration
Parameters
Damping
TINTP
Main Menu>Solution>-Load Step OptsTime/Frequenc>Time Integration
ALPHAD Main Menu>Solution>-Load Step Opts-Time/Frequenc>
BETAD
Damping
MP,
DAMP
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 27 of 55
General Options
Integration Time Step
DELTIM
Main Menu>Solution>-Load Step OptsTime/Frequenc>Time& Time Step
OUTPR
Main Menu>Solution>-Load Step Opts-Output
Ctrls>Solu Printout
Output Control Options
Printed Output
5.6.1.1 Dynamics Options
Dynamic options include the following:
Transient Integration Parameters [TINTP]
Transient integration parameters control the nature of the Newmark time integration technique.
The default is to use the constant average acceleration scheme; see the ANSYS Theory
Reference for further details.
Damping
Damping in some form is present in most structures and should be included in your analysis.
You can specify four forms of damping in a reduced transient dynamic analysis:
Alpha (mass) damping [ALPHAD]
Beta (stiffness) damping [BETAD]
Material-dependent beta damping [MP,DAMP]
Element damping (COMBIN7, etc.)
See Section 5.12.3, "Damping," for further details.
5.6.1.2 General Options
General options include the following:
Integration Time Step [DELTIM]
The integration time step is assumed to be constant throughout the transient.
Note-If you do issue the TIME command for the first load step, it will be ignored. The first
solution is always a static solution at TIME = 0.
5.6.1.3 Output Control Options
Output control options include the following:
Printed Output [OUTPR]
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 28 of 55
Use this option to output the displacement solution at the master DOF.
6. Write the first load step to a load step file (Jobname.S01).
Command(s):
LSWRITE
GUI:
Main Menu>Solution>-Solve-Write LS File
7. Specify loads and load step options for the transient loading portion, writing each load step to a
load step file [LSWRITE].
The following load step options are valid for the transient load steps:
General Options
Time (specifies the time at the end of the load step) [TIME]
Stepped [KBC,1] or ramped loads [KBC]
Output Controls
Printed output [OUTPR]
Reduced displacement file [OUTRES]
The only valid label on these commands is NSOL (nodal solution). The default for OUTRES is
to write the solution for every fourth time-point to the reduced displacement file (unless there
are gap conditions defined, in which case the default is to write every solution).
8. Save a back-up copy of the database to a named file.
Command(s):
SAVE
GUI:
Utility Menu>File>Save as
9. Start the transient solution. For additional ways to create and solve multiple load steps (the array
parameter method and the multiple SOLVE method), see Section 3.10.3 of the ANSYS Basic Analysis
Procedures Guide.
Command(s):
LSSOLVE
GUI:
Main Menu>Solution>-Solve-From LS Files
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 29 of 55
10. Leave SOLUTION.
Command(s):
FINISH
GUI:
Close the Solution menu.
5.6.2 Step 3: Review the Results of the Reduced Solution
Results from the reduced transient dynamic solution are written to the reduced displacement file,
Jobname.RDSP. They consist of time-varying displacements at the master DOF. You can review the
master DOF displacements as a function of time using POST26. (POST1 cannot be used, because the
complete solution at all DOF is not available.)
The procedure to use POST26 is the same as described for the full method, except for the following
differences:
Before defining the POST26 variables, use the FILE command (Main Menu>TimeHist
Postpro>Settings>File) to specify that data are to be read from Jobname.RDSP. For example,
if the jobname is TRANS, the FILE command would be: FILE,TRANS,RDSP. (By default,
POST26 looks for a results file, which is not written by a reduced transient solution.)
Only nodal degree of freedom data (at master DOF) are available for processing, so you can use
only the NSOL command to define variables.
5.6.3 Expand the Solution (Expansion Pass)
The expansion pass starts with the reduced solution and calculates the complete displacement, stress,
and force solution at all degrees of freedom. These calculations are done only at time-points that you
specify. Before you begin the expansion pass, therefore, you should review the results of the reduced
solution (using POST26) and identify the critical time-points.
Note-An expansion pass is not always required. For instance, if you are interested mainly in
displacements at specific points on the structure, then the reduced solution could satisfy your
requirements. However, if you want to determine displacements at non-master DOF, or if you are
interested in the stress or force solution, then you must perform an expansion pass.
5.6.3.1 Points to Remember
The .RDSP, .EMAT, .ESAV, .DB, and .TRI files from the reduced solution must be available.
The database must contain the same model for which the reduced solution was calculated.
The procedure for the expansion pass is explained below.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 30 of 55
5.6.3.2 Expanding the Solution
1. Re-enter SOLUTION.
Command(s):
/SOLU
GUI:
Main Menu>Solution
Note-You must explicitly leave SOLUTION (using the FINISH command) and re-enter
(/SOLUTION) before performing the expansion pass.
2. Activate the expansion pass and its options.
Table 5-6 Expansion pass options
Option
Command GUI Path
Expansion Pass
On/Off
EXPASS Main Menu>Solution>-Analysis Type-ExpansionPass
No. of Solutions to be
Main Menu>Solution>-Load Step OptsNUMEXP
Expanded
ExpansionPass>Range of Solu's
Single Solution to
Expand
EXPSOL
Main Menu>Solution>-Load Step Opts-ExpansionPass>
-Single Expand-By Time/Freq
5.6.3.3 Option: Expansion Pass On/Off [EXPASS]
Choose ON.
5.6.3.4 Option: Number of Solutions to be Expanded [NUMEXP]
Specify the number. This number of evenly spaced solutions will be expanded over the specified time
range. The solutions nearest these times will be expanded. Also specify whether to calculate stresses
and forces (default is to calculate both).
5.6.3.5 Option: Single Solution to Expand [EXPSOL]
Use this option to identify a single solution for expansion if you don't need to expand multiple
solutions in a range. You can specify it either by load step and substep number or by time. Also
specify whether to calculate stresses and forces (default is to calculate both).
3. Specify load step options. The only options valid for a transient dynamic expansion pass are output
controls:
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 31 of 55
5.6.3.6 Output Controls
Printed Output [OUTPR]
Use this option to include any results data on the output file (Jobname.OUT).
Database and Results File Output [OUTRES]
This option controls the data on the results file (Jobname.RST).
Extrapolation of Results [ERESX]
Use this option to review element integration point results by copying them to the nodes instead
of extrapolating them (default).
Note-The FREQ field on OUTPR and OUTRES can only be ALL or NONE. ERESX allows
you to review element integration point results by copying them to the nodes instead of
extrapolating them (default).
4. Start expansion pass calculations.
Command(s):
SOLVE
GUI:
Main Menu>Solution>-Solve-Current LS
5. Repeat steps 2, 3, and 4 for additional solutions to be expanded. Each expansion pass is stored as a
separate load step on the results file.
6. Leave SOLUTION.
Command(s):
FINISH
GUI:
Close the Solution window.
5.6.4 Review the Results of the Expanded Solution
Results from the expansion pass are written to the structural results file, Jobname.RST. They consist
of the following data, calculated at each time-point for which the reduced solution was expanded:
Primary data
Nodal displacements (UX, UY, UZ, ROTX, ROTY, ROTZ)
Derived data:
Nodal and element stresses
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 32 of 55
Nodal and element strains
Element forces
Nodal reaction forces
etc.
You can review these results using POST1. (If you expanded solutions at several time-points, you can
also use POST26 to obtain graphs of stress versus time, strain versus time, etc.) The procedure to use
POST1 (or POST26) is the same as described for the full method.
5.7 Sample Transient Dynamic Analysis (GUI
Method)
In this example, you will perform a transient dynamic analysis using the reduced method to determine
the transient response to a constant force with a finite rise in time. In this problem, a steel beam
supporting a concentrated mass is subjected to a dynamic load.
5.7.1 Problem Description
A steel beam of length $B(B and geometric properties shown in Problem Specifications is supporting
a concentrated mass, m. The beam is subjected to a dynamic load F(t) with a rise time tr and a
maximum value F1. If the weight of the beam is considered to be negligible, determine the time of
maximum displacement response tmax and the response ymax. Also determine the maximum bending
stress bend in the beam.
The beam is not used in this solution and its area is arbitrarily input as unity. The final time of 0.1 sec
allows the mass to reach its largest deflection. One master degree of freedom is selected at the mass in
the lateral direction. A static solution is done at the first load step. Symmetry could have been used in
this model. The time of maximum response (0.092 sec) is selected for the expansion pass calculation.
5.7.2 Problem Specifications
The following material properties are used for this problem:
E = 30 x 103 ksi
m = 0.0259067 kips-sec2/in
The following geometric properties are used for this problem:
l = 800.6 in4
h = 18 in
$B(B = 20 ft = 240 in.
Loading for this problem is:
F1 = 20 kips
tr = 0.075 sec
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 33 of 55
5.7.3 Problem Sketch
Figure 5-3 Model of a Steel Beam Supporting a Concentrated Mass
5.7.3.1 Specify the Title
1. Choose menu path Utility Menu>File>Change Title.
2. Enter the text "Transient response to a constant force with a finite rise time."
3. Click on OK.
5.7.3.2 Define Element Types
1. Choose menu path Main Menu>Preprocessor>Element Type> Add/Edit/Delete. The Element
Types dialog box appears.
2. Click on Add. The Library of Element Types dialog box appears.
3. In the left scroll box, click on "Structural Beam."
4. In the right scroll box, click on "2D elastic 3," and click on Apply.
5. In the left scroll box, click on "Structural Mass."
6. In the right scroll box, click on "3D mass 21," and click on OK.
7. In the Element Types dialog box, click once on "Type 2," and click on Options.
8. In the scroll box for Rotary inertia options, scroll to "2-D w/o rot iner" and select it.
9. Click on OK and click on Close in the Element Types dialog box.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 34 of 55
5.7.3.3 Define Real Constants
1. Choose menu path Main Menu>Preprocessor>Real Constants. The Real Constants dialog box
appears.
2. Click on Add. The Element Type for Real Constant dialog box appears.
3. Click on OK. The Real Constants for BEAM3 dialog box appears.
4. Enter 1 for Area, 800.6 for IZZ, and 18 for Height.
5. Click on OK.
6. In the Real Constants dialog box, click on Add.
7. Click on Type 2 MASS21 and click on OK. The Real Constants for MASS21 dialog box appears.
8. Enter .0259067 in the 2-D mass field and click on OK.
9. Click on Close in the Real Constant dialog box.
5.7.3.4 Define Material Properties
1. Choose menu path Main Menu>Preprocessor>Material Props> -Constant-Isotropic. The
Isotropic Material Properties dialog box appears.
2. Click on OK. A second dialog box appears.
3. Enter 30e3 for EX (Young's modulus) and click on OK.
5.7.3.5 Define Nodes
1. Choose menu path Main Menu>Preprocessor>-Modeling-Create> Nodes>In Active CS. The
Create Nodes in Active Coordinate System dialog box appears.
2. Enter 1 for node number and click on Apply to define node 1 at 0,0,0.
3. Enter 3 for node number.
4. Enter 240,0,0 for X,Y,Z coordinates and click on OK.
5. Choose menu path Main Menu>Preprocessor>-Modeling-Create> Nodes>Fill between Nds.
The Fill between Nds. menu appears.
6. Click once on nodes 1 and 3, and click on OK. The Create Nodes Between 2 Nodes dialog box
appears.
7. Click on OK to accept the default settings.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 35 of 55
5.7.3.6 Define Elements
1. Choose menu path Main Menu>Preprocessor>-Modeling-Create> Elements>-Auto NumberedThru Nodes. The Elements from Nodes picking menu appears.
2. Click once on nodes 1 and 2, and click on Apply.
3. Click once on nodes 2 and 3, and click on OK.
4. Choose menu path Main Menu>Preprocessor>-Modeling-Create> Elements>Elem Attributes.
The Element Attributes dialog box appears.
5. Select 2 for the Mass 21 Element type number.
6. Select 2 for Real constant set no. and click on OK.
7. Choose menu path Main Menu>Preprocessor>-Modeling-Create> Elements>-Auto NumberedThru Nodes. The Elements from Nodes picking menu appears.
8. Click once on node 2 and click OK.
5.7.3.7 Define Analysis Type and Analysis Options
1. Choose menu path Main Menu>Solution>-Analysis Type-New Analysis.
2. Click on "Transient" to select it, and click on OK.
3. Choose menu path Main Menu>Solution>Analysis Options. The Transient Analysis dialog box
appears.
4. Click on "Reduced" and click on OK. The Reduced Transient Analysis dialog box appears.
5. In the drop down menu for Damping effects, select "Ignore."
6. Click on OK.
5.7.3.8 Define Master Degrees of Freedom
1. Choose menu path Main Menu>Solution>Master DOFs>-User Selected-Define. The Define
Master DOFs picking menu appears.
2. Click on node 2 and click on OK. The Define Master DOFs dialog box appears.
3. In the drop down menu for 1st degree of freedom, select "UY."
4. Click on OK.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 36 of 55
5.7.3.9 Set Load Step Options
1. Choose the menu path Main Menu>Solution>-Load Step Opts- Time/Frequenc>Time - Time
Step. The Time and Time Step Options dialog box appears.
2. Enter .004 for Time step size and click on OK.
5.7.3.10 Apply Loads for the First Load Step
1. Choose menu path Main Menu>Solution>-Loads-Apply>-Structural- Displacement>On
Nodes. The Apply U,ROT on Nodes picking menu appears.
2. Click on node 1, and click on Apply. The Apply U,ROT on Nodes dialog box appears.
3. Click on "UY" to select it and click on Apply.
4. Click on node 3, and click on OK. The Apply U,ROT on Nodes dialog box appears.
5. Click on "UX" to select it. "UY" should remain selected. Click on OK.
6. Choose menu path Main Menu>Solution>-Loads-Apply>-Structural- Force/Moment>On
Nodes. The Apply F/M on Nodes picking menu appears.
7. Click on node 2 and click on OK. The Apply F/M on Nodes dialog box appears.
8. In the drop down menu for Direction of force/mom, select "FY." Leave the value as blank (zero)
for the initial static solution.
9. Click on OK, and click on SAVE_DB on the ANSYS Toolbar.
5.7.3.11 Specify Output
1. Choose menu path Main Menu>Solution>-Load Step Opts-Output Ctrls>DB/Results File. The
Controls for Database and Results File Writing dialog box appears.
2. Click on the "Every substep" radio button and click on OK.
5.7.3.12 Solve the First Load Step
1. Choose menu path Main Menu>Solution>-Solve-Current LS.
2. Review the information in the status window, and click on Close.
3. Click on OK on the Solve Current Load Step dialog box to begin the solution.
4. Click on Close when the solution is done window appears.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 37 of 55
5.7.3.13 Apply Loads for the Next Load Step
1. Choose menu path Main Menu>Solution>-Load Step Opts- Time/Frequenc>Time - Time Step.
The Time and Time Step Options dialog box appears.
2. Enter .075 for Time at end of load step and click on OK.
3. Choose menu path Main Menu>Solution>-Loads-Apply>-Structural- Force/Moment>On
Nodes. The Apply F/M on Nodes picking menu appears.
4. Click on node 2 and click on OK. The Apply F/M on Nodes dialog box appears.
5. Enter 20 for Force/moment value and click on OK.
5.7.4 Solve the Next Load Step
1. Choose menu path Main Menu>Solution>-Solve-Current LS.
2. Review the information in the status window, and click on Close.
3. Click on OK on the Solve Current Load Step dialog box to begin the solution.
4. Click on Close when the solution is done window appears
5.7.4.1 Set the Next Time Step and Solve
1. Choose menu path Main Menu>Solution>-Load Step Opts- Time/Frequenc>Time - Time Step.
The Time and Time Step Options dialog box appears.
2. Enter .1 for Time at end of load step and click on OK.
3. Choose menu path Main Menu>Solution>-Solve-Current LS.
4. Review the information in the status window, and click on Close.
5. Click on OK on the Solve Current Load Step dialog box to begin the solution.
6. Click on Close when the solution is done window appears.
7. Choose menu path Main Menu>Finish.
5.7.4.2 Run the Expansion Pass and Solve
1. Choose menu path Main Menu>Solution>-Analysis Type- ExpansionPass. Set the Expansion
pass radio button to On and click on OK.
2. Choose menu path Main Menu>Solution>-Load Step Opts- ExpansionPass>-Single Expand-By
Time/Freq. The Expand Single Solution by Time/Frequency dialog box appears.
3. Enter 0.092 for Time-point/Frequency and click on OK.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 38 of 55
4. Choose menu path Main Menu>Solution>-Solve-Current LS.
5. Review the information in the status window, and click on Close.
6. Click on OK on the Solve Current Load Step dialog box to begin the solution.
7. Click on Close when the solution is finished.
5.7.4.3 Review the Results in POST26
1. Choose menu path Main Menu>TimeHist Postpro>Settings>File. The File Settings dialog box
appears.
2. In the Files scroll box, scroll to and select "file.rdsp" and click on OK.
3. Choose menu path Main Menu>TimeHist Postpro>Define Variables. The Defined Time-History
Variables dialog box appears.
4. Click on Add. The Add Time-History Variable dialog box appears.
5. Click on OK to accept the default of Nodal DOF result. The Define Nodal Data dialog box appears.
6. Accept the default of 2 for the reference number of the variable.
7. Enter 2 for node number.
8. Enter NSOL for user-specified label.
9. In the right scroll box, click on "Translation UY" to select it.
10. Click on OK, then click on Close in the Defined Time-History Variable dialog box.
11. Choose menu path Main Menu>TimeHist Postpro>Graph Variables.
12. Enter 2 for 1st variable to graph and click on OK. The graph appears on the ANSYS Graphics
window.
13. Choose menu path Main Menu>TimeHist Postpro>List Variables.
14. Enter 2 for 1st variable to list and click on OK.
15. Review the information in the status window and click on Close.
5.7.4.4 Review the Results in POST1
1. Choose menu path Main Menu>General Postproc>-Read Results-First Set.
2. Choose menu path Main Menu>General Postproc>Plot Results>Deformed Shape. The Plot
Deformed Shape dialog box appears.
3. Click on "Def + undeformed" and click on OK.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 39 of 55
5.7.4.5 Exit ANSYS
1. Choose QUIT from the ANSYS Toolbar.
2. Click on the save option you want, and click on OK.
5.8 A Sample Transient Dynamic Analysis
(Command or Batch Method)
You can perform the example transient dynamic analysis of a bracket using the ANSYS commands
shown below instead of GUI choices. Items prefaced with an exclamation point (!) are comments.
/PREP7
/TITLE, Transient Response to a Constant Force with a Finite Rise Time
ET,1,BEAM3
! Two-dimensional beam
ET,2,MASS21,,,4 ! Two-dimensional mass
R,1,1,800.6,18 ! Beam area = 1, I = 800.6, h = 18
R,2,.0259067
! Mass
MP,EX,1,30e3
N,1
N,3,240
FILL
E,1,2
! Beam elements
EGEN,2,1,1
TYPE,2
REAL,2
E,2
! Type 2 element with real constant 2
M,2,UY ! Master DOF in Y direction at middle of beam
FINISH
/SOLU
ANTYPE,TRANS
! Transient dynamic analysis
TRNOPT,REDUC,,NODAMP
! Reduced transient analysis, ignore damping
DELTIM,.004
! Integration time step size
D,1,UY
D,3,UX,,,,,UY
OUTPR,BASIC,1
OUTRES,ALL,1
F,2,FY,0
! Force = 0 at Time = 0
SOLVE
TIME,.075
! Time at end of load step
F,2,FY,20
! Force is ramped to 20
SOLVE
TIME,.1 ! Constant force until time = 0.1
SOLVE
FINISH
/SOLU
! The following is the expansion pass using BEAM3 and MASS21 elements
EXPASS,ON
! Expansion pass on
EXPSOL,,,0.092 ! Time of maximum response
SOLVE
FINISH
/POST26
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 40 of 55
NUMVAR,0
FILE,file,rdsp
NSOL,2,2,U,Y,NSOL
! Define the variables
PLVAR,2 ! Graph the variables
PRVAR,2 ! List the variables
FINISH
/POST1
SET,FIRST
PLDISP,1
FINISH
! Read in results
! Display deformed and undeformed shape
5.9 Where to Find Other Examples
Several ANSYS publications, particularly the ANSYS Verification Manual, describe additional
transient dynamic analyses.
The ANSYS Verification Manual consists of test case analyses demonstrating the analysis capabilities
of the ANSYS program. While these test cases demonstrate solutions to realistic analysis problems,
the ANSYS Verification Manual does not present them as step-by-step examples with lengthy data
input instructions and printouts. However, most ANSYS users who have at least limited finite element
experience should be able to fill in the missing details by reviewing each test case's finite element
model and input data with accompanying comments.
The following list shows you the variety of transient dynamic analysis test cases that the ANSYS
Verification Manual includes:
VM9 Large Lateral Deflection of Unequal Stiffness Springs
VM40 Large Deflection and Rotation of a Beam Pinned at One End
VM65 Transient Response of a Ball Impacting a Flexible Surface
VM71 Transient Response of a Spring, Mass, Damping System
VM72 Logarithmic Decrement
VM73 Free Vibration with Coulomb Damping
VM74 Transient Response to an Impulsive Excitation
VM75 Transient Response to a Step Excitation
VM77 Transient Response to a Constant Force with a Finite Rise Time
VM79 Transient Response of a Bi-Linear Spring Assembly
VM80 Plastic Response to a Suddenly Applied Constant Force
VM81 Transient Response of a Drop Container
VM82 Simply Supported Laminated Plate Under Pressure
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 41 of 55
VM84 Displacement Propagation along a Bar with Free Ends
VM85 Transient Displacements in a Suddenly Stopped Moving Bar
VM91 Large Rotation of a Swinging Pendulum
VM156 Natural Frequency of Nonlinear Spring-Mass System
VM158 Motion of a Bobbing Buoy
VM179 Dynamic Double Rotation of a Jointed Beam
VM182 Transient Response of a Spring-Mass System
5.10 Mode Superposition Transient Dynamic
Analysis
The mode superposition method sums factored mode shapes (obtained from a modal analysis) to
calculate the dynamic response. This method is available in the ANSYS/Multiphysics,
ANSYS/Mechanical, ANSYS/Structural, and ANSYS/LinearPlus products. The procedure to use the
method consists of five main steps:
1. Build the model.
2. Obtain the modal solution.
3. Obtain the mode superposition transient solution.
4. Expand the mode superposition solution.
5. Review the results.
Of these, the first step is the same as described for the full method. The remaining steps are described
below.
5.10.1 Obtain the Modal Solution
Chapter 3 describes how to obtain a modal solution. You should keep in mind the following
additional points:
The mode extraction method should be either reduced, Block Lanczos, subspace, or
PowerDynamics. (The other two methods, unsymmetric and damped, do not apply to mode
superposition.) You can use PowerDynamics only if there is no initial static solution (all loads
are zero in the first load step).
Be sure to extract all modes that may contribute to the dynamic response.
For the reduced mode extraction method, include those master degrees of freedom at those
nodes at which forces and gap conditions are to be defined.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 42 of 55
Specify displacement constraints, if any. These constraints will be ignored if they are specified
in the mode superposition transient solution instead of in the modal solution.
If you need to apply element loads (pressures, temperatures, accelerations, etc.) in the transient
dynamic analysis, you must specify them in the modal analysis. The loads are ignored for the
modal solution, but a load vector will be calculated and written to the mode shape file
(Jobname.MODE). You can then use this load vector for the transient solution.
The modes need not be expanded for the mode superposition solution. (If you want to review
mode shapes from a reduced modal solution, however, you must expand the mode shapes.)
The model data (e.g., nodal rotations) should not be changed between the modal and transient
analyses.
5.10.2 Obtain the Mode Superposition Transient Solution
In this step, the program uses mode shapes extracted by the modal solution to calculate the transient
response.
5.10.2.1 Points to Remember
The mode shape file (Jobname.MODE) must be available.
The database must contain the same model for which the modal solution was obtained.
5.10.2.2 Obtaining the Solution
The procedure to obtain the mode superposition transient solution is described below:
1. Enter SOLUTION.
Command(s):
/SOLU
GUI:
Main Menu>Solution
2. Define the analysis type and analysis options. These are the same as described for the full method,
except for the following differences:
Choose the mode superposition method of solution [TRNOPT].
Specify the number of modes you want to use for the solution [TRNOPT]. This determines the
accuracy of the transient solution. At a minimum, you should use all modes that you think will
contribute to the dynamic response. If you expect higher frequencies to be excited, for example,
the number of modes specified should include the higher modes. The default is to use all modes
calculated in the modal solution.
Nonlinear options [NLGEOM, SSTIF, NROPT] are not available.
Restarts are not available [ANTYPE].
3. Define gap conditions, if any. They can only be defined between two master nodes or between
master nodes and ground. More details about gap conditions are presented under the reduced method.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 43 of 55
Command(s):
GP
GUI:
Main Menu>Solution>Dynamic Gap Cond>Define
4. Apply loads to the model. The following loading restrictions apply in a mode superposition
transient dynamic analysis:
Only forces, translational accelerations, and a load vector created in the modal analysis are
valid. Imposed non-zero displacements are ignored. Use the LVSCALE command (Main
Menu>Solution>-Loads-Apply> Load Vector>For Mode Super) to apply the load vector
from the modal solution.
If mode shapes from a reduced modal solution are being used, forces may be applied only at
master DOF.
Multiple load steps are usually required to specify the load history in a transient analysis. The
first load step is used to establish initial conditions, and second and subsequent load steps are
used for the transient loading, as explained next.
Establish initial conditions. The only initial condition that may be explicitly established is the
initial displacement. A static solution using the mode superposition method is always
performed as the first solution with the given loads. If PowerDynamics was used for the modal
solution, no loads or displacements are allowed (that is, only u=0 is valid as the initial
condition). For pseudo-static analyses, the mode superposition method may yield poor results at
TIME=0.
The following load step options are available for the first load step:
Table 5-7 Options for the first load step
Option
Command GUI Path
Dynamics Options
Transient Integration
Parameters
TINTP
Main Menu>Solution>-Load Step OptsTime/Frequenc>Time Integration
Load Vector
LVSCALE
Main Menu>Solution>-Loads-Apply>Load Vector>For
Mode Super
Damping
ALPHAD
BETAD
Main Menu>Solution>-Load Step Opts-Time/Frequenc>
DMPRAT
Damping
MP,
DAMP
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 44 of 55
General Options
Integration Time Step
DELTIM
Main Menu>Solution>-Load Step OptsTime/Frequenc>Time & Time Step
OUTPR
Main Menu>Solution>-Load Step Opts-Output
Ctrls>Solu Printout
Output Control Options
Printed Output
5.10.2.3 Dynamics Options
Dynamic options include the following:
Transient Integration Parameters [TINTP]
Transient integration parameters control the nature of the Newmark time integration technique.
The default is to use the constant average acceleration scheme; see your ANSYS Theory
Reference for further details.
Load Vector [LVSCALE]
The load vector option allows you to apply a load vector created by the modal solution as one
of the loads. You can use such a load vector to apply element loads (pressures, temperatures,
etc.) on the model.
Damping
Damping in some form is present in most structures and should be included in your analysis.
You can specify five forms of damping in a mode superposition transient dynamic analysis:
Alpha (mass) damping [ALPHAD]
Beta (stiffness) damping [BETAD]
Constant damping ratio [DMPRAT]
Material-dependent beta damping [MP,DAMP]
Modal damping [MDAMP]
See Section 5.12.3, "Damping," later in this chapter for further details.
5.10.2.4 General Options
General options include the following:
Integration Time Step [DELTIM]
The only valid option for the first load step is the integration time step [DELTIM], which is
assumed to be constant throughout the transient. By default, the integration time step is
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 45 of 55
assumed to be 1/(20f), where f is the highest frequency chosen for the solution. The DELTIM
command is valid only in the first load step and is ignored in subsequent load steps.
Note-If you do issue the TIME command in the first load step, it will be ignored. The first
solution is always a static solution at TIME = 0.
5.10.2.5 Output Control Options
Output control options include the following:
Printed Output [OUTPR]
Use this option to control printout of the displacement solution at the master DOF.
5. Write the first load step to a load step file (Jobname.S01) by issuing the LSWRITE command.
Command(s):
LSWRITE
GUI:
Main Menu>Solution>-Solve-Write LS File
6. Specify loads and load step options for the transient loading portion, writing each load step to a
load step file [LSWRITE].
The following load step options are valid for the transient load steps:
5.10.2.6 General Options
General options include the following:
Time Option [TIME]
This option specifies time at the end of the load step.
Load Vector [LVSCALE]
The load vector option allows you to apply a load vector created by the modal solution as one
of the loads.
Stepped or Ramped Loads [KBC]
This option indicates whether to ramp the load change over the load step [KBC] or to stepapply the load change [KBC,1]. The default is ramped.
5.10.2.7 Output Control Options
Output control options include the following:
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 46 of 55
Printed Output [OUTPR]
Use this option to control printed output.
Database and Results File Output [OUTRES]
This option controls the data on the reduced displacement file.
The only valid label on these commands is NSOL (nodal solution). The default for OUTRES is
to write the solution for every fourth time-point to the reduced displacement file (unless there
are gap conditions defined, in which case the default is to write every solution).
7. If you used either the subspace or the Block Laczos option for the modal analysis
(MODOPT,SUBSP or MODPT,LANB), you may use a nodal component with the OUTRES,NSOL
command to limit the displacement data written to the reduced displacement file Jobname.RDSP. The
expansion pass will only produce valid results for those nodes and for those elements in which all of
the nodes of the elements have been written to the .RDSP file. To use this option, first suppress all
writing by invoking OUTRES,NSOL,NONE, then specify the item(s) of interest by invoking
OUTRES,NSOL,freq,component. Repeat the OUTRES command for any additional nodal
components that you want to write to the .RDSP file. Only one output frequence is allowed-ANSYS
uses the last frequency specified by OUTRES.
8. Save a back-up copy of the database to a named file.
Command(s):
SAVE
GUI:
Utility Menu>File>Save as
9. Start the transient solution.
Command(s):
LSSOLVE
GUI:
Main Menu>Solution>-Solve-From LS Files
10. Leave SOLUTION.
Command(s):
FINISH
GUI:
Close the Solution menu.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 47 of 55
The mode superposition transient solution is written to the reduced displacement file, Jobname.RDSP,
regardless of whether the subspace or reduced method was used for the modal solution. You will
therefore need to expand the solution if you are interested in stress results.
5.10.3 Expand the Mode Superposition Solution
The procedure for the expansion pass is the same as described for the reduced method. Jobname.TRI
is needed only if the reduced method was used for the modal solution. The output from the expansion
pass includes the structural results file, Jobname.RST, containing expanded results.
5.10.4 Review the Results
Results consist of displacements, stresses, and reaction forces at each time-point for which the
solution was expanded. You can review these results using POST26 or POST1, as explained for the
full method.
Note-In the reduced or mode superposition methods, only static force is available with the FORCE
command.
5.10.5 Sample Input
A sample input listing for a mode superposition transient analysis is shown below:
! Build the Model
/FILNAM,...
! Jobname
/TITLE,...
! Title
/PREP7
! Enter PREP7
----! Generate model
--FINISH
! Obtain the Modal Solution
/SOLU
! Enter SOLUTION
ANTYPE,MODAL
! Modal analysis
MODOPT,REDU
! Reduced method
M,...
! Master DOF
TOTAL,...
D,...
! Constraints
SF,...
! Element loads
ACEL,...
SAVE
SOLVE
FINISH
! Obtain the Mode Superposition Transient Solution
/SOLU
! Re-enter SOLUTION
ANTYPE,TRANS
! Transient analysis
TRNOPT,MSUP,...
! Mode superposition method
LVSCALE,...
! Scale factor for element loads
F,...
! Nodal Loads
MDAMP,...
! Modal damping ratios
DELTIM,...
! Integration time step sizes
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
LSWRITE
------TIME,...
KBC,...
OUTRES,...
--LSWRITE
SAVE
LSSOLVE
FINISH
Page 48 of 55
! Write first load step (Remember: the first load step
! is solved statically at time=0.)
! Loads, etc. for 2nd load step
! Time at end of second load step
! Ramped or stepped loads
! Results-file data controls
! Write 2nd load step (first transient load step)
! Initiate multiple load step solution
! Review results of the mode superposition solution
/POST26
! Enter POST26
FILE,,RDSP
! Results file is Jobname.RDSP
SOLU,...
! Store solution summary data
NSOL,...
! Store nodal result as a variable
PLVAR,...
! Plot variables
PRVAR,...
! List variables
FINISH
! Expand the Solution
/SOLU
! Re-enter SOLUTION
EXPASS,ON
! Expansion pass
NUMEXP,...
! No. of solutions to expand; time range
OUTRES,...
! Results-file data controls
SOLVE
FINISH
! Review the Results of the Expanded Solution
/POST1
SET,...
! Read desired set of results into database
PLDISP,...
! Deformed shape
PRRSOL,...
! Reaction loads
PLNSOL,...
! Contour plot of nodal results
PRERR
! Global percent error (a measure of mesh adequacy)
----! Other postprocessing as desired
--FINISH
See the ANSYS Commands Reference for a discussion of the ANTYPE, MODOPT, M, TOTAL,
ACEL, TRNOPT, LVSCALE, MDAMP, DELTIM, TIME, KBC, OUTRES, LSSOLVE, FILE,
SOLU, NSOL, PLVAR, PRVAR, EXPASS, NUMEXP, OUTRES, PLDISP, PRRSOL, PLNSOL
and PRERR commands.
5.11 Prestressed Transient Dynamic Analysis
A prestressed transient dynamic analysis calculates the dynamic response of a prestressed structure,
such as a heat-treated part with residual thermal stresses. Prestressed-analysis procedures vary,
depending on the type of transient dynamic analysis being performed:
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 49 of 55
5.11.1 Prestressed Full Transient Dynamic Analysis
You can include prestressing effects in a full transient dynamic analysis by applying the prestressing
loads in a preliminary static load step. (Do not remove these loads in subsequent load steps.) The
procedure consists of two steps:
1. Build your model, enter SOLUTION, and define a transient analysis type [ANTYPE,TRANS].
Apply all prestressing loads.
Turn time integration effects off [TIMINT,OFF].
Turn stress stiffening effects on [SSTIF,ON].
Set time equal to some small dummy value [TIME].
Write your first load step to Jobname.S01 [LSWRITE].
If prestressing effects develop because of nonlinear behavior (as in the case of residual thermal
stresses in a casting), several load steps might be required to complete the static prestressing
phase of your analysis. In the case of geometric nonlinearities (large deformation effects), you
can capture the prestressing effect by issuing NLGEOM,ON.
2. For all subsequent load steps, turn time integration effects on [TIMINT,ON], and proceed using
the full transient dynamic analysis procedures described previously. Once all load steps are written to
files [LSWRITE], you can initiate the multiple load step solution [LSSOLVE].
Note-The static prestress solution must be done as a separate solution if initial conditions are to
be defined with the IC command (Main Menu>Solution>-Loads-Apply> Initial
Condit'n>Define). The IC command is valid only in the first load step.
5.11.2 Prestressed Reduced Transient Dynamic Analysis
The procedure to do a prestressed reduced transient dynamic analysis requires that you first prestress
the structure in a separate static analysis, as explained below. It is assumed that the transient (timevarying) stresses (which are superimposed on the prestress) are much smaller than the prestress itself.
If they are not, you should use the full transient dynamic analysis.
1. Build the model and obtain a static solution with prestress effects turned on [PSTRES,ON]. The
procedure to obtain a static solution is explained in Chapter 2.
2. Re-enter SOLUTION [/SOLU] and obtain the reduced transient solution, also with prestress effects
turned on [PSTRES,ON]. Files Jobname.DB, Jobname.EMAT, and Jobname.ESAV from the static
analysis must be available.
5.11.3 Prestressed Mode Superposition Transient Dynamic
Analysis
In order to include prestress effects in a mode superposition analysis, you must first do a prestressed
modal analysis. See Chapter 3 for details. Once prestressed modal analysis results are available,
proceed as for any other mode superposition analysis.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 50 of 55
5.12 Other Analysis Details
5.12.1 Guidelines for Integration Time Step
As mentioned earlier, the accuracy of the transient dynamic solution depends on the integration time
step: the smaller the time step, the higher the accuracy. A time step that is too large will introduce
error that affects the response of the higher modes (and hence the overall response). A time step that
is too small will waste computer resources. To calculate an optimum time step, you should consider
the following five guidelines:
1. Resolve the response frequency. The time step should be small enough to resolve the motion
(response) of the structure. Since the dynamic response of a structure can be thought of as a
combination of modes, the time step should be able to resolve the highest mode that contributes to the
response. For the Newmark time integration scheme, it has been found that using approximately
twenty points per cycle of the highest frequency of interest results in a reasonably accurate solution.
That is, if f is the frequency (in cycles/time), the integration time step (ITS) is given by
ITS = 1/20f
Smaller ITS values may be required if acceleration results are needed.
The following figure shows the effect of ITS on the period elongation of a single-DOF springmass system. Notice that 20 or more points per cycle result in a period elongation of less than 1
percent.
Figure 5-4 Effect of integration time step on period elongation
2. Resolve the applied load-versus-time curve(s). The time step should be small enough to "follow"
the loading function. The response tends to lag the applied loads, especially for stepped loads, as
shown in Figure 5-5. Stepped loads require a small ITS at the time of the step change so that the step
change can be closely followed. ITS values as small as 1/180f may be needed to follow stepped loads.
Figure 5-5 Transient input versus transient response
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 51 of 55
3. Resolve the contact frequency. In problems involving contact (impact), the time step should be
small enough to capture the momentum transfer between the two contacting surfaces. Otherwise, an
apparent energy loss will occur and the impact will not be perfectly elastic. The integration time step
can be determined from the contact frequency (fc) as:
where k is the gap stiffness, m is the effective mass acting at the gap, and N is the number of
points per cycle. To minimize the energy loss, at least thirty points per cycle of (N=30) are
needed. Larger values of N may be required if acceleration results are needed. For the reduced
and mode superposition methods, N must be at least 7 to ensure stability.
You can use fewer than thirty points per cycle during impact if the contact period and contact
mass are much less than the overall transient time and system mass, because the effect of any
energy loss on the total response would be small.
4. Resolve the wave propagation. If you are interested in wave propagation effects, the time step
should be small enough to capture the wave as it travels through the elements. See "Build the Model"
for a discussion of element size.
5. Resolve the nonlinearities. For most nonlinear problems, a time step that satisfies the preceding
four guidelines is sufficient to resolve the nonlinearities. There are a few exceptions, however: if the
structure tends to stiffen under the loading (for example, large deflection problems that change from
bending to membrane load-carrying behavior), the higher frequency modes that are excited will have
to be resolved.
After calculating the time step using the appropriate guidelines, use the minimum value for your
analysis. By using automatic time stepping, you can let the ANSYS program decide when to increase
or decrease the time step during the solution. Automatic time stepping is discussed next.
Caution: Avoid using exceedingly small time steps, especially when establishing initial conditions.
Exceedingly small numbers can cause numerical difficulties. Based on a problem time scale of unity,
for example, time steps smaller than 10-10 could cause numerical difficulties.
5.12.2 Automatic Time Stepping
Automatic time stepping, also known as time step optimization, attempts to adjust the integration time
step during solution based on the response frequency and on the effects of nonlinearities. The main
benefit of this feature is that the total number of substeps can be reduced, resulting in computer
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 52 of 55
resource savings. Also, the number of times that you might have to rerun the analysis (adjusting the
time step size, nonlinearities, etc.) is greatly reduced. If nonlinearities are present, automatic time
stepping gives the added advantage of incrementing the loads appropriately and retreating to the
previous converged solution (bisection) if convergence is not obtained. You can activate automatic
time stepping with the AUTOTS command. (For more information on automatic time stepping in the
context of nonlinearities, see Chapter 8.)
Although it seems like a good idea to activate automatic time stepping for all analyses, there are some
cases where it may not be beneficial (and may even be harmful):
Problems that have only localized dynamic behavior (for example, turbine blade and hub
assemblies), where the low-frequency energy content of part of the system may dominate the
high-frequency areas
Problems that are constantly excited (for example, seismic loading), where the time step tends
to change continually as different frequencies are excited
Kinematics (rigid-body motion) problems, where the rigid-body contribution to the response
frequency term may dominate
5.12.3 Damping
Damping is present in most systems and should be specified in a dynamic analysis. Five forms of
damping are available in the ANSYS program:
Alpha and Beta Damping (Rayleigh Damping)
Material-Dependent Damping
Constant Damping Ratio
Modal Damping
Element Damping
Only the constant damping ratio and modal damping are available in the ANSYS/LinearPlus program.
You can specify more than one form of damping in a model. The program will formulate the damping
matrix [C] as the sum of all the specified forms of damping.
Table 5-8 shows the types of damping available for different structural analyses.
Table 5-8 Damping for different analysis types
Element
Modal
Damping Damping3
Analysis
Type
Alpha,Beta MaterialDamping Dependent
Damping
[ALPHAD,
BETAD] [MP,DAMP]
Constant
Damping
Ratio
Static
N.A.
N.A.
N.A.
N.A.
N.A.
Modal
No5
No5
No5
No
No
Undamped Yes
Yes
No
No
Yes
(COMBIN7,
[DMPRAT] [MDAMP] etc.)
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 53 of 55
Damped
Harmonic
Yes
Yes
Yes
No
Yes
Reduced
Yes
Yes
Yes
No
Yes
Mode Sup
Yes
Yes4
Yes
Yes
No
Yes
Yes
No
No
Yes
Reduced
Yes
Yes
No
No
Yes
Mode Sup
Yes
Yes4
Yes
Yes
No
Spectrum
SPRS,
MPRS2
Yes1
Yes
Yes
Yes
No
DDAM2
Yes1
Yes
Yes
Yes
No
PSD
Yes
No
Yes
Yes
No
Buckling
N.A.
N.A.
N.A.
N.A.
N.A.
Yes
No
No
Yes
Full
Transient
Full
Substructure Yes
1. N.A. Not applicable
damping only, no damping
2
Damping is used only for mode combination and not for computation of mode
coefficients
3
Includes superelement damping matrix
4
If converted to modal damping by expansion of modes
5
If specified, an effective damping ratio is calculated for subsequent
spectrum analyses
1
Alpha damping and Beta damping are used to define Rayleigh damping constants and . The
damping matrix [C] is calculated by using these constants to multiply the mass matrix [M] and
stiffness matrix [K]:
The ALPHAD and BETAD commands are used to specify and , respectively, as decimal numbers.
The values of and are not generally known directly, but are calculated from modal damping ratios,
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 54 of 55
. is the ratio of actual damping to critical damping for a particular mode of vibration, i. If
natural circular frequency of mode i, and satisfy the relation
is the
In many practical structural problems, alpha damping (or mass damping) may be ignored ( =0). In
such cases, you can evaluate from known values of and , as
Only one value of can be input in a load step, so choose the most dominant frequency active in that
load step to calculate .
To specify both and for a given damping ratio , it is commonly assumed that the sum of the and
terms is nearly constant over a range of frequencies (see Figure 5-6). Therefore, given and a
frequency range to , two simultaneous equations can be solved for and .
Figure 5-6 Rayleigh damping
Alpha damping can lead to undesirable results if an artificially large mass has been introduced into the
model. One common example is when an artificially large mass is added to the base of a structure to
facilitate acceleration spectrum input. (You can use the large mass to convert an acceleration
spectrum to a force spectrum.) The alpha damping coefficient, which is multiplied by the mass matrix,
will produce artificially large damping forces in such a system, leading to inaccuracies in the
spectrum input, as well as in the system response.
Beta damping and material damping can lead to undesirable results in a nonlinear analysis. These
damping coefficients are multiplied by the stiffness matrix, which is constantly changing in a
nonlinear analysis. The resulting change in damping can sometimes be opposite to the actual change
in damping that can occur in physical structures. For example, whereas physical systems that
experience softening due to plastic response will usually experience a corresponding increase in
damping, an ANSYS model that has beta damping will experience a decrease in damping as plastic
softening response develops.
Material-dependent damping allows you to specify beta damping ( ) as a material property
[MP,DAMP]. Note, however, that MP,DAMP in a spectrum analysis [ANTYPE,SPECTR] specifies
a material-dependent damping ratio , not . Also note that for multi-material elements such as
SOLID46, SOLID65, SHELL91, and SHELL99, can only be specified for the element as a whole,
not for each material in the element. In these cases, is determined from the material pointer for the
element (set with the MAT command), rather than the material pointed to by any real constant MAT
for the element.
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
STRUCTURAL: Chapter 5: Transient Dynamic Analysis (UP19980818)
Page 55 of 55
The constant damping ratio is the simplest way of specifying damping in the structure. It represents
the ratio of actual damping to critical damping, and is specified as a decimal number with the
DMPRAT command. DMPRAT is available only for spectrum, harmonic response, and mode
superposition transient dynamic analyses.
Modal damping gives you the ability to specify different damping ratios for different modes of
vibration. It is specified with the MDAMP command and is available only for the spectrum and mode
superposition method of solution (transient dynamic and harmonic response analyses).
Element damping involves using element types having viscous damping characteristics, such as
COMBIN7, COMBIN14, COMBIN37, COMBIN40, etc.
For more details about damping, see the ANSYS Theory Reference.
Go to the beginning of this chapter
http://mostreal.sk/html/guide_55/g-str/GSTR5.htm
12/22/2015
You might also like
- 1way Transient FSI ACT Workshop 15.0Document28 pages1way Transient FSI ACT Workshop 15.0DaoudNo ratings yet
- Fatigue Analysis of Welded Components: Designer’s Guide to the Structural Hot-Spot Stress ApproachFrom EverandFatigue Analysis of Welded Components: Designer’s Guide to the Structural Hot-Spot Stress ApproachRating: 5 out of 5 stars5/5 (1)
- Tieback Wall Design and ConstructionDocument184 pagesTieback Wall Design and Constructionlaporpo123100% (1)
- Boyd C.Ringo. Robert B. Anderson. - Designing Floor Slabs On Grade PDFDocument289 pagesBoyd C.Ringo. Robert B. Anderson. - Designing Floor Slabs On Grade PDFCassey Mond100% (2)
- ANSYS Explicit Dynamics Analysis GuideDocument256 pagesANSYS Explicit Dynamics Analysis GuideSuri Kens Michua83% (6)
- Blast CalculationDocument35 pagesBlast CalculationnhulugallaNo ratings yet
- AISSEE Sainik Schools Syllabus 2021 For Class 6 PDF - Exam Pattern - SainikSchoolGuide - inDocument5 pagesAISSEE Sainik Schools Syllabus 2021 For Class 6 PDF - Exam Pattern - SainikSchoolGuide - inLandon MitchellNo ratings yet
- Design and Construction of Bridge Embankment Using R.E. Wall PanelsDocument7 pagesDesign and Construction of Bridge Embankment Using R.E. Wall PanelsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design For Blower Foundation - SATORPDocument30 pagesDesign For Blower Foundation - SATORPsinambeladavid100% (3)
- Chicago Comprehensive Guide To Bolt Modeling in Ansys 15 0Document30 pagesChicago Comprehensive Guide To Bolt Modeling in Ansys 15 0Jesus Crhisty100% (1)
- Nonlinear Analysis FEMAPDocument406 pagesNonlinear Analysis FEMAPmunjasolNo ratings yet
- Design of Culvert - Excel SheetDocument17 pagesDesign of Culvert - Excel Sheethafiz zain saeed67% (3)
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- ANSYS OptionsDocument44 pagesANSYS OptionsNshuti Rene FabriceNo ratings yet
- AWB130 Dynamics 04 SpectrumDocument68 pagesAWB130 Dynamics 04 SpectrumKishore MylavarapuNo ratings yet
- Random Vibrations: Analysis of Structural and Mechanical SystemsFrom EverandRandom Vibrations: Analysis of Structural and Mechanical SystemsNo ratings yet
- ANSYS Mechanical APDL Contact Technology GuideDocument256 pagesANSYS Mechanical APDL Contact Technology GuideFrancis Santiago100% (1)
- Eqp FoundationDocument24 pagesEqp FoundationLandon MitchellNo ratings yet
- AWB130 Dynamics 06 TransientDocument37 pagesAWB130 Dynamics 06 TransientOrlando Javier Díaz AresNo ratings yet
- Ageing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityFrom EverandAgeing and Life Extension of Offshore Structures: The Challenge of Managing Structural IntegrityNo ratings yet
- FHWA-NHI-10-024 Design & Construction of MSE Walls and Reinforced Soil Slopes - Volume IDocument332 pagesFHWA-NHI-10-024 Design & Construction of MSE Walls and Reinforced Soil Slopes - Volume IKathleen Noonan100% (3)
- Topology and Shape Optimization With AbaqusDocument41 pagesTopology and Shape Optimization With AbaqusPhuongDx100% (1)
- Ansys 18.2: Transient Analysis On The BridgeDocument7 pagesAnsys 18.2: Transient Analysis On The BridgeUsman Khalil50% (2)
- Tutorial Ansys ApdlDocument4 pagesTutorial Ansys Apdlep_frenz100% (1)
- Introduction to Finite Element Method (FEMDocument20 pagesIntroduction to Finite Element Method (FEMkpvraj100% (1)
- Explicit Dynamics Chapter 1 Intro To Exp DynDocument38 pagesExplicit Dynamics Chapter 1 Intro To Exp Dynricelles1No ratings yet
- ANSYS Workbench Tutorial 1Document15 pagesANSYS Workbench Tutorial 1Samad Nad100% (1)
- Detailed Project Report For Biogas Power PlantDocument132 pagesDetailed Project Report For Biogas Power PlantLandon MitchellNo ratings yet
- ANSYS Mechanical APDL for Finite Element AnalysisFrom EverandANSYS Mechanical APDL for Finite Element AnalysisRating: 4.5 out of 5 stars4.5/5 (8)
- AACTx - R160 - L-05 - Response Spectrum & Random Vibration AnalysesDocument24 pagesAACTx - R160 - L-05 - Response Spectrum & Random Vibration AnalysesPercy Romero Murillo100% (1)
- Explicit Dynamics Analysis SettingsDocument24 pagesExplicit Dynamics Analysis Settingsgowtham raju buttiNo ratings yet
- ElectromagneticCompatibilityMethodsAnalysisCircuitsandMeasurementThirdEdition 1 PDFDocument1,151 pagesElectromagneticCompatibilityMethodsAnalysisCircuitsandMeasurementThirdEdition 1 PDFjotaruiz30No ratings yet
- Overviews of StaticsDocument70 pagesOverviews of StaticsJacous WcyNo ratings yet
- ANSYS Modal AnalysisDocument40 pagesANSYS Modal AnalysisKha PhucNo ratings yet
- R D Vib Ti Random Vibration: ANSYS Mechanical ANSYS Mechanical DynamicsDocument22 pagesR D Vib Ti Random Vibration: ANSYS Mechanical ANSYS Mechanical DynamicsRoss WaringNo ratings yet
- Dubois BookDocument506 pagesDubois BookkasreedharNo ratings yet
- Ansys TipsDocument79 pagesAnsys TipsMuhammad AliNo ratings yet
- Explicit - Dynamics - Chapter 1 - Intro - To - Exp - DynDocument38 pagesExplicit - Dynamics - Chapter 1 - Intro - To - Exp - Dyndorita_2400No ratings yet
- Fluent-Intro 14.5 WS06 Sliding MeshDocument35 pagesFluent-Intro 14.5 WS06 Sliding MeshalfredozegarraNo ratings yet
- ANSYS For Harmonic Transient and PSDDocument23 pagesANSYS For Harmonic Transient and PSDMohammad Ahmad GharaibehNo ratings yet
- LS-DYNA-Intro 14.5 L12 Quick Guide To ANSYS LS-DYNA ExtensionDocument25 pagesLS-DYNA-Intro 14.5 L12 Quick Guide To ANSYS LS-DYNA ExtensionEnrique FloresNo ratings yet
- Time HistoryDocument7 pagesTime HistoryshivamomshantiNo ratings yet
- Gravity Wall (RCC) R0 (27!11!2017) 5m For TestingDocument81 pagesGravity Wall (RCC) R0 (27!11!2017) 5m For TestingLandon MitchellNo ratings yet
- Mechanical Intro 17.0 M06 Connections and Remote Boundary ConditionsDocument67 pagesMechanical Intro 17.0 M06 Connections and Remote Boundary ConditionsSamedŠkuljNo ratings yet
- Basic DynamicsDocument494 pagesBasic DynamicsFabio Tolentino100% (1)
- PIP STC01018 (Blast Resistant Building Design Criteria)Document55 pagesPIP STC01018 (Blast Resistant Building Design Criteria)Liu Leo100% (3)
- Detailed Project Report For Biogas Power PlantDocument132 pagesDetailed Project Report For Biogas Power PlantShubham Jain100% (2)
- Prefab Bamboo House Floor PlansDocument16 pagesPrefab Bamboo House Floor PlansLandon MitchellNo ratings yet
- ANSYS Meshing Application IntroductionDocument11 pagesANSYS Meshing Application IntroductionMudassir FarooqNo ratings yet
- Harmonic Analysis IN ANSYSDocument15 pagesHarmonic Analysis IN ANSYSSai KiranNo ratings yet
- ANSYS Structural Analysis Guide MODAL ANALYSISDocument22 pagesANSYS Structural Analysis Guide MODAL ANALYSISdaniel howNo ratings yet
- ANSYS Mechanical APDL Intro.Document485 pagesANSYS Mechanical APDL Intro.Ali Fahem100% (2)
- ANSYS Macro Programming with *USE CommandDocument5 pagesANSYS Macro Programming with *USE CommandbalabooksNo ratings yet
- AM 12 Appendix ADocument66 pagesAM 12 Appendix AMohamad Poortoosi100% (1)
- AnsysDocument18 pagesAnsysmechanical engineering100% (12)
- New Functions and Enhancements in V6.11Document121 pagesNew Functions and Enhancements in V6.11DS AlfonsoNo ratings yet
- Fatigue Tutorial v81Document11 pagesFatigue Tutorial v81cooljovinNo ratings yet
- Ansys Macro BasicsDocument16 pagesAnsys Macro BasicsSHANKAR VETALNo ratings yet
- Frequency Domain Analysis in LS-DYNA - Yun Huang - Jan-2013Document80 pagesFrequency Domain Analysis in LS-DYNA - Yun Huang - Jan-2013Puneet BahriNo ratings yet
- Modal Analysis of a Cantilever Beam in ANSYSDocument41 pagesModal Analysis of a Cantilever Beam in ANSYSselva_raj215414No ratings yet
- APDL - Chapter 4 - APDL As A Macro Language (UP19980820)Document18 pagesAPDL - Chapter 4 - APDL As A Macro Language (UP19980820)Nam VoNo ratings yet
- Hypermesh To Ansys WorkbenchDocument7 pagesHypermesh To Ansys WorkbenchSharan AnnapuraNo ratings yet
- CompositesWorkshop ANSYS DAFDocument22 pagesCompositesWorkshop ANSYS DAFDavid Acosta100% (1)
- Mechanical APDL Command ReferenceDocument46 pagesMechanical APDL Command ReferenceUltraJohn95No ratings yet
- Ex 7 Tetra Vs Hexa MeshingDocument23 pagesEx 7 Tetra Vs Hexa MeshingMetin MehelNo ratings yet
- Earthquake Analyses in Ansys WorkbenchDocument14 pagesEarthquake Analyses in Ansys WorkbenchEmmanuel Ikhaiduwor100% (1)
- AnsysDocument23 pagesAnsysraj_ven2003100% (1)
- Chapter 3: Modal AnalysisDocument43 pagesChapter 3: Modal AnalysisNandish BharadwajNo ratings yet
- ANSYS TipsDocument8 pagesANSYS Tipscivilengineer_trNo ratings yet
- Autodesk Simulation Workshop Section 2 Linear AnalysisDocument20 pagesAutodesk Simulation Workshop Section 2 Linear AnalysisRogério Vilella JunqueiraNo ratings yet
- Detals of Steps:: Finite Element Analysis SolverDocument6 pagesDetals of Steps:: Finite Element Analysis SolverZia AhmedNo ratings yet
- Alaa 2009 A - Simplified Approach For Optimization by Dynamic ProgrammingDocument14 pagesAlaa 2009 A - Simplified Approach For Optimization by Dynamic ProgrammingAlaa El-HazekNo ratings yet
- 6.3.2 Implicit Dynamic Analysis Using Direct Integration Products: Abaqus/Standard Abaqus/CAEDocument9 pages6.3.2 Implicit Dynamic Analysis Using Direct Integration Products: Abaqus/Standard Abaqus/CAEZiad Al SarrafNo ratings yet
- 154 - Understanding Dynamic Time AnalysesDocument34 pages154 - Understanding Dynamic Time AnalysesSameOldHatNo ratings yet
- Ansys LabDocument14 pagesAnsys LabadbhasNo ratings yet
- Gripple India New CatalogueDocument17 pagesGripple India New CatalogueFaizan UlhaqueNo ratings yet
- Final Report PDFDocument14 pagesFinal Report PDFArjun S SanakanNo ratings yet
- BACE India GFRG - Advantages NewDocument7 pagesBACE India GFRG - Advantages NewLandon MitchellNo ratings yet
- R GFRG Bace Swiftbuild Panel Specs 29,4,23Document7 pagesR GFRG Bace Swiftbuild Panel Specs 29,4,23Landon MitchellNo ratings yet
- 01 8th Nift MathsDocument12 pages01 8th Nift MathsLandon MitchellNo ratings yet
- Oxidation PondDocument2 pagesOxidation PondLandon MitchellNo ratings yet
- 5 Viii Ismo-Set-2 QPDocument7 pages5 Viii Ismo-Set-2 QPLandon MitchellNo ratings yet
- Grouts GroutingDocument4 pagesGrouts GroutingBalaiya ParthibanNo ratings yet
- 6 Viii Ismo-Set-2 KeyDocument1 page6 Viii Ismo-Set-2 KeyLandon MitchellNo ratings yet
- 5 Viii Ismo-Set-2 QPDocument7 pages5 Viii Ismo-Set-2 QPLandon MitchellNo ratings yet
- Consideration For Reinforced Soil Walls in Urban FlyoversDocument16 pagesConsideration For Reinforced Soil Walls in Urban FlyoversDilipNo ratings yet
- MSW Legacy Waste - 19!3!2019Document34 pagesMSW Legacy Waste - 19!3!2019Landon MitchellNo ratings yet
- Design ExamplesDocument7 pagesDesign ExamplesLandon MitchellNo ratings yet
- 4.22nd April AP Class IV Maths Assignment 1Document2 pages4.22nd April AP Class IV Maths Assignment 1Landon MitchellNo ratings yet
- Parametric Studies of Guyed Towers Under Wind and Seismic LoadsDocument14 pagesParametric Studies of Guyed Towers Under Wind and Seismic LoadsmohaNo ratings yet
- Time History Input Integration Time Steop CalculationDocument2 pagesTime History Input Integration Time Steop CalculationLandon MitchellNo ratings yet
- 2.065/2.066 Acoustics and Sensing: Massachusetts Institute of TechnologyDocument12 pages2.065/2.066 Acoustics and Sensing: Massachusetts Institute of TechnologyKurran SinghNo ratings yet
- FS8 FS8: Integrated Learning Activity Sheet in Science 8Document12 pagesFS8 FS8: Integrated Learning Activity Sheet in Science 8Nikki SolisNo ratings yet
- Aps 113 HF Data Sheet enDocument5 pagesAps 113 HF Data Sheet enjairNo ratings yet
- 12-Pulse Auto-Transformer Rectifier With HarmonicDocument5 pages12-Pulse Auto-Transformer Rectifier With Harmonicalex696No ratings yet
- The Charging System Has Three Main Components: The Alternator, The Voltage Regulator, and The BatteriesDocument20 pagesThe Charging System Has Three Main Components: The Alternator, The Voltage Regulator, and The BatteriesMae CherryNo ratings yet
- Homemade Electric Motor: I. PurposeDocument4 pagesHomemade Electric Motor: I. PurposedmejiagaNo ratings yet
- 0625 w12 Ms 21Document7 pages0625 w12 Ms 21Prasad SwaminathanNo ratings yet
- Horno de Microondas Sharp R211hpalDocument36 pagesHorno de Microondas Sharp R211hpalErick RodriguezNo ratings yet
- Phys 12 Part 1Document325 pagesPhys 12 Part 1Smart NemoNo ratings yet
- Materials in Electrical EngineeringDocument377 pagesMaterials in Electrical Engineeringgiolgau01100% (1)
- PHYS 2426 Lab 7 - The RC Circuit - ManualDocument6 pagesPHYS 2426 Lab 7 - The RC Circuit - Manualwhatis you nameNo ratings yet
- Module 7 WORK, POWER AND ENERGYDocument3 pagesModule 7 WORK, POWER AND ENERGYAxl Arboleda ValiolaNo ratings yet
- 9702 w10 QP 42Document24 pages9702 w10 QP 42Dewan Olin ChotepadaeNo ratings yet
- Module 5 IntroductionDocument8 pagesModule 5 IntroductionRAHUL NKNo ratings yet
- Me09 303 Fluid MechanicsDocument3 pagesMe09 303 Fluid MechanicsHarishMvNo ratings yet
- Delta Power System User ManualDocument75 pagesDelta Power System User Manualdia3phongNo ratings yet
- 10th Science I SemiENG QueBank MSCERTDocument5 pages10th Science I SemiENG QueBank MSCERTAshutosh KumarNo ratings yet
- Airfoil design parameters and lift generationDocument12 pagesAirfoil design parameters and lift generationSagar MoreNo ratings yet
- Frequency Detection Module (FDM) : General Description Technical SpecificationDocument4 pagesFrequency Detection Module (FDM) : General Description Technical SpecificationKenNa100% (1)
- Familiarization of The Electrical Machine Laboratory ApparatusDocument5 pagesFamiliarization of The Electrical Machine Laboratory ApparatusRosalinda CondeNo ratings yet
- Budgeted Learning Competencies Science 7Document5 pagesBudgeted Learning Competencies Science 7anamarietuvNo ratings yet
- Arjuna - NLMDocument11 pagesArjuna - NLMGreat DeclamationsNo ratings yet
- Forces and Friction: Sliding vs. Tipping ForcesDocument8 pagesForces and Friction: Sliding vs. Tipping ForcesmeeechersNo ratings yet
- Antenna 1Document53 pagesAntenna 1Heart StealerNo ratings yet
- List of Worldwide AC VoltagesDocument4 pagesList of Worldwide AC VoltageshirararaNo ratings yet
- CE 233 FM Lab Fall 2019 Lab ManualDocument42 pagesCE 233 FM Lab Fall 2019 Lab ManualRavi RajNo ratings yet
- Braking of Electric Motors: Need..... ?Document8 pagesBraking of Electric Motors: Need..... ?Ramesh VeerNo ratings yet
- Conservation of MomentumDocument19 pagesConservation of MomentumwscienceNo ratings yet