You might also like
- Practica 6. Terminada 3.0Document24 pagesPractica 6. Terminada 3.0Luis Eduardo VázquezNo ratings yet
- Compendio de Practicas Sensores 2005Document50 pagesCompendio de Practicas Sensores 2005zhefyroNo ratings yet
- Tecnicas de Sintonizacion para ControladoresDocument4 pagesTecnicas de Sintonizacion para Controladoresrenemelendez0% (1)
- Criterio Cohen CoonDocument10 pagesCriterio Cohen CoonJose Camilo Eraso GuerreroNo ratings yet
- D. ElementosDocument36 pagesD. ElementosDavid FuentessNo ratings yet
- Problemas de Maquinas ElectricasDocument5 pagesProblemas de Maquinas ElectricasMiguel AngelNo ratings yet
- Reporte 2Document14 pagesReporte 2Cristian AlejandroNo ratings yet
- Criterio de Routh-HurwitzDocument6 pagesCriterio de Routh-HurwitzPeter Languila100% (1)
- Rectificadores TrifásicosDocument7 pagesRectificadores TrifásicosManu Ace100% (1)
- Lista de ..Document33 pagesLista de ..Henrique Scheidt KleinNo ratings yet
- CUESTIONARIO DE FORMULAS para Solución de Circuitos Equivalentes de Generador de CD y Motor de CDDocument7 pagesCUESTIONARIO DE FORMULAS para Solución de Circuitos Equivalentes de Generador de CD y Motor de CDEmmanuel Lopez PeñafielNo ratings yet
- Guia Practica 7 Curvas Caracteristicas Generadores de ContinuaDocument2 pagesGuia Practica 7 Curvas Caracteristicas Generadores de ContinuaCristian Garcia Alarcòn67% (3)
- Práctica IDocument4 pagesPráctica IJuan PerezNo ratings yet
- Descripcion Del Proceso de Control Lavadora y Horno INTRUMENTACIÓNDocument6 pagesDescripcion Del Proceso de Control Lavadora y Horno INTRUMENTACIÓNPedro Gabriel GonzálezNo ratings yet
- Taller3 Tercer Corte-Atmega328pDocument2 pagesTaller3 Tercer Corte-Atmega328pMiguel Ángel Murillo RamírezNo ratings yet
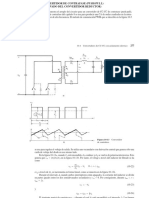
- Convertidor Contrafase (Push-Pull)Document3 pagesConvertidor Contrafase (Push-Pull)Rafael RivasNo ratings yet
- Polos DominantesDocument1 pagePolos DominantesIvan50% (2)
- Electrónica de PotenciaDocument9 pagesElectrónica de PotenciaMiguel Angel HidalgoNo ratings yet
- Multivibrador BiestableDocument14 pagesMultivibrador BiestableMario GonzalesNo ratings yet
- Variador de Velocidad y UPSDocument6 pagesVariador de Velocidad y UPSMario GomezNo ratings yet
- Exposicion Instrumentacion Unidad 4Document42 pagesExposicion Instrumentacion Unidad 4Chiton AguirreNo ratings yet
- Teorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesDocument4 pagesTeorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesJesus Antonio Mtz100% (2)
- Automatizacion Salida Tipo ReleDocument4 pagesAutomatizacion Salida Tipo ReleAndrea ChancusigNo ratings yet
- Introducción A La Modelación de Sistemas ExpoDocument28 pagesIntroducción A La Modelación de Sistemas ExpoMarioNo ratings yet
- TransformadorDocument6 pagesTransformadorJuan CelyNo ratings yet
- 1 CAPlibroDocument8 pages1 CAPlibroDanny MartínezNo ratings yet
- Infografía 2 (Tipos de Sistemas de Control)Document1 pageInfografía 2 (Tipos de Sistemas de Control)LEONARDO VILLARREAL PEREZNo ratings yet
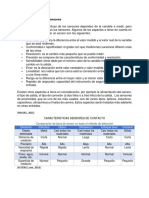
- Caracteristicas y Fabricantes de SensoresDocument5 pagesCaracteristicas y Fabricantes de SensoresRobby Roberto PedrazaNo ratings yet
- Circuitos de Disparo Con AislamientoDocument12 pagesCircuitos de Disparo Con AislamientoedgarNo ratings yet
- Un Transformador de Frecuencia Variable VFTDocument2 pagesUn Transformador de Frecuencia Variable VFTErnesto Torres Quiroga0% (1)
- 2do Taller - Sistemas de Control ContinuoDocument9 pages2do Taller - Sistemas de Control ContinuojagcomezNo ratings yet
- Sistemas Electricos LabDocument39 pagesSistemas Electricos LabIveth AlvarezNo ratings yet
- TAREA RECUPERACION SEGUNDO Examen Parcial de Maquinas Electricas IIDocument4 pagesTAREA RECUPERACION SEGUNDO Examen Parcial de Maquinas Electricas IIDeyvis Oscar Florez HachaNo ratings yet
- Instrumentacion 5.1Document13 pagesInstrumentacion 5.1juan pabloNo ratings yet
- Informe Tecnico de Balanza Con Motor Brushless-1Document23 pagesInforme Tecnico de Balanza Con Motor Brushless-1Leonardo RomoNo ratings yet
- 4.2 FlybackDocument54 pages4.2 FlybackjoseNo ratings yet
- Inversor 5 NivelesDocument10 pagesInversor 5 NivelesMitchell A. MorenoNo ratings yet
- Onvertidor Monofasico A TrifasicoDocument3 pagesOnvertidor Monofasico A TrifasicoJose Molina0% (1)
- Retroalimentación NegativaDocument11 pagesRetroalimentación Negativaheroe2000mx9296No ratings yet
- Transmisión de Energía en CD Beneficios y DesvestajasDocument5 pagesTransmisión de Energía en CD Beneficios y DesvestajasDaniel HernandezNo ratings yet
- Practica 26Document6 pagesPractica 26Santiago MéndezNo ratings yet
- Aplicaciones de Conversor de Frecuencia A Voltaje Final ConclusionesDocument3 pagesAplicaciones de Conversor de Frecuencia A Voltaje Final ConclusionesMarco Manuel Marca Castillo100% (1)
- Capitulo 2Document90 pagesCapitulo 2Axel AlvarezNo ratings yet
- Control de FrecuenciaDocument56 pagesControl de FrecuenciaEsther100% (1)
- Rectificador de Onda CompletaDocument12 pagesRectificador de Onda CompletaNelly ChaconNo ratings yet
- Practica #7Document15 pagesPractica #7SarduHugoNo ratings yet
- Lección 15 - Reguladores CA-CADocument14 pagesLección 15 - Reguladores CA-CAKike Fernandez100% (1)
- Amplificador Operacional Sumador RestadoDocument14 pagesAmplificador Operacional Sumador RestadoAc AryanNo ratings yet
- Tarea-Inv. Convertidores CD-CDDocument12 pagesTarea-Inv. Convertidores CD-CDerik garciaNo ratings yet
- Papoulis - 'Probability, Random Variables and Stochastic Processes'Document0 pagesPapoulis - 'Probability, Random Variables and Stochastic Processes'Angel AgNo ratings yet
- JBDocument21 pagesJBAna LucyNo ratings yet
- Practica 5Document12 pagesPractica 5Uri UriNo ratings yet
- Circuito de Disparo Con AislamientoDocument18 pagesCircuito de Disparo Con AislamientoAlejandro Israel AlvaradoNo ratings yet
- Informe 2 Grupo6 Capitulo1Document11 pagesInforme 2 Grupo6 Capitulo1Edgar EnriquezNo ratings yet
- Teoria de ControlDocument4 pagesTeoria de ControlMax AlvarezNo ratings yet
- Espin Deber1Document11 pagesEspin Deber1Jonathan Antonio Espín RosalesNo ratings yet
- Deber 1Document8 pagesDeber 1Danny MartínezNo ratings yet
- Control AutomaticoDocument13 pagesControl AutomaticoJadiel Isai100% (2)
- Sistema Lazo Abierto y CerradoDocument6 pagesSistema Lazo Abierto y Cerradoaide natalyNo ratings yet
- Ensayo Control 1Document5 pagesEnsayo Control 1cheo90100% (1)
- Unidades Fundamentales Del S.I.Document2 pagesUnidades Fundamentales Del S.I.DWilliam93No ratings yet
- VIM - Términos Más ComunesDocument2 pagesVIM - Términos Más ComunesDWilliam93No ratings yet
- Unidades de MantenimientoDocument6 pagesUnidades de MantenimientoDWilliam93No ratings yet
- Herramientas EstadísticasDocument3 pagesHerramientas EstadísticasDWilliam93No ratings yet
- Intercambiador TemperaturasDocument1 pageIntercambiador TemperaturasDWilliam93No ratings yet
- Informe Fundamentos de La MetrologíaDocument6 pagesInforme Fundamentos de La MetrologíaDWilliam93No ratings yet
- Resumne - METODOS - CALIBRACIÓnDocument5 pagesResumne - METODOS - CALIBRACIÓnDWilliam93No ratings yet
- Protocolo PPIDocument3 pagesProtocolo PPIDWilliam93No ratings yet
- Nativos DigitalesDocument2 pagesNativos DigitalesDWilliam93No ratings yet
- Bombas Hidraulicas William ChicaizaDocument11 pagesBombas Hidraulicas William ChicaizaDWilliam93No ratings yet
- Tipos de PLC Existentes en El Mercado.Document9 pagesTipos de PLC Existentes en El Mercado.DWilliam9367% (3)
- EnsayoDocument2 pagesEnsayoDWilliam93No ratings yet
- Normas de InstrumentaciónDocument3 pagesNormas de InstrumentaciónDWilliam930% (1)
- Consulta Detector Picos Conversor Ac DC Circuito Zona MuertaDocument15 pagesConsulta Detector Picos Conversor Ac DC Circuito Zona MuertaDWilliam93No ratings yet
- Obra EscultoricaDocument4 pagesObra EscultoricaDWilliam93No ratings yet
- Proteccion para Motores.Document6 pagesProteccion para Motores.DWilliam93No ratings yet
- Proteccion para Motores.Document6 pagesProteccion para Motores.DWilliam93No ratings yet
- Como Crear SubvisDocument3 pagesComo Crear SubvisDWilliam93No ratings yet
- Opamps CircuitosDocument31 pagesOpamps CircuitosElias Esteban100% (1)
- Informe MatlabDocument33 pagesInforme MatlabDWilliam93No ratings yet
- Consulta Filtros.Document29 pagesConsulta Filtros.DWilliam93No ratings yet
- Sistemas de ControlDocument10 pagesSistemas de ControlDWilliam93No ratings yet
- ResumenDocument7 pagesResumenDWilliam93No ratings yet
- Proteccion para Motores.Document6 pagesProteccion para Motores.DWilliam93No ratings yet
- Guerrero Trip 110 Manual ServiceDocument30 pagesGuerrero Trip 110 Manual Servicegabriel100% (2)
- Teorías Sobre El DestinoDocument9 pagesTeorías Sobre El DestinoANGELINENo ratings yet
- Clasificacion de Flujos de FluidosDocument29 pagesClasificacion de Flujos de FluidosCTh LLanosNo ratings yet
- Dinámica Unidad 4.1 Cinemática de Cuerpos Rígidos PDFDocument14 pagesDinámica Unidad 4.1 Cinemática de Cuerpos Rígidos PDFLorenzo GarcíaNo ratings yet
- Simulador TintayaDocument96 pagesSimulador TintayaFALCKOR100% (1)
- IGRTDocument28 pagesIGRTAlejandra Ayulo CumpalliNo ratings yet
- Modelo de Colas gg1Document4 pagesModelo de Colas gg1mario100% (1)
- Control de Calidad Shotcrete Jim Phillips - EPC ChileDocument39 pagesControl de Calidad Shotcrete Jim Phillips - EPC ChileGaby MuñozNo ratings yet
- Taller 1 de Tecnologia 1.6Document4 pagesTaller 1 de Tecnologia 1.6Alexander RichardsNo ratings yet
- Fisica IB Jose Pineda 17febDocument2 pagesFisica IB Jose Pineda 17febJOSÉ SEBASTIÁN PINEDA RINCÓNNo ratings yet
- Introduccion A La TermodinamicaDocument44 pagesIntroduccion A La TermodinamicaAdrian AllenNo ratings yet
- Analisis Tenacidad-Materiales EstructuralesDocument6 pagesAnalisis Tenacidad-Materiales EstructuralesKelly Viviana BareñoNo ratings yet
- Abbe5 - ESMANUAL DE USODocument15 pagesAbbe5 - ESMANUAL DE USOAna Rosa MartinezNo ratings yet
- Laboratorios AbcDocument9 pagesLaboratorios AbcBelen LWNo ratings yet
- San Agustin de Hipona Maestro de La Conciencia de OccidenteDocument4 pagesSan Agustin de Hipona Maestro de La Conciencia de OccidenteBRAYNSEVILLLANo ratings yet
- Monografia en FisicaDocument6 pagesMonografia en FisicaDickNo ratings yet
- Actividad #14 - Conclusiones de La Diagrama de Fuerza Cortante - LLTRDocument3 pagesActividad #14 - Conclusiones de La Diagrama de Fuerza Cortante - LLTRRomel Lliuya0% (2)
- Reacciones Gas-SólidoDocument10 pagesReacciones Gas-SólidoAlexanderUrquizoNo ratings yet
- Suelos Arcillosos y Susceptibles de Problemas de ExpansiónDocument18 pagesSuelos Arcillosos y Susceptibles de Problemas de ExpansiónDante NinaNo ratings yet
- El Aguila de Oro SiragusaDocument254 pagesEl Aguila de Oro SiragusaRafael Perez Gomez100% (1)
- Taller2-ResistividadEléctrica-Suba SoluciónDocument7 pagesTaller2-ResistividadEléctrica-Suba SoluciónKEVIN RAUL GOMEZ SANCHEZNo ratings yet
- Márquez DJM PDFDocument114 pagesMárquez DJM PDFSheydi Córdova GarcíaNo ratings yet
- Lengua 2º Bach T3 Los Géneros Discursivos (I) OXFORDDocument8 pagesLengua 2º Bach T3 Los Géneros Discursivos (I) OXFORDuniversoexactoNo ratings yet
- Guía Trabajos Prácticos Termodinámica y Máquinas TérmicasDocument45 pagesGuía Trabajos Prácticos Termodinámica y Máquinas TérmicasGustavo FerreyraNo ratings yet
- Escala de BarthelDocument4 pagesEscala de BarthelDency ParedesNo ratings yet
- Deformaciones en Elementos Estructurales A FlexiónDocument12 pagesDeformaciones en Elementos Estructurales A Flexióngediaze100% (1)
- Ip2902 Mecánica de Medios Continuos - Trabajo Conv OrdinariaDocument7 pagesIp2902 Mecánica de Medios Continuos - Trabajo Conv OrdinariaJuan Climaco CLNo ratings yet
- 3toma de Decisión Con IncertidumbreDocument11 pages3toma de Decisión Con IncertidumbrejesusNo ratings yet
- Lab Sensores Pt100 y Ad590Document5 pagesLab Sensores Pt100 y Ad590Hernan Camilo ContrerasNo ratings yet
- Sistemas de Puesta A TierraDocument5 pagesSistemas de Puesta A TierraAlex EdUu NúñezNo ratings yet