You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- L297Document12 pagesL297wtn2013No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- LM 297Document12 pagesLM 297Monika JhaNo ratings yet
- Stepper Motor Controllers: DescriptionDocument12 pagesStepper Motor Controllers: DescriptionGigi TyireanNo ratings yet
- L297Document11 pagesL297Igor Rocha PauloNo ratings yet
- LS7290 Stepper Motor ControlDocument12 pagesLS7290 Stepper Motor ControlOlger NavarroNo ratings yet
- LS7290Document9 pagesLS7290Cidão GuimarãesNo ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- ALPHA 10/10P SERVICE MANUALDocument19 pagesALPHA 10/10P SERVICE MANUAL王宗超No ratings yet
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- Kta198 ManualDocument4 pagesKta198 ManualnasadllNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Current Controller For Stepping Motors: DescriptionDocument8 pagesCurrent Controller For Stepping Motors: Descriptiontryu40No ratings yet
- Stand-alone PWM voltage-source inverter design and operationDocument10 pagesStand-alone PWM voltage-source inverter design and operationxenotargetNo ratings yet
- CNC Shield For A4988Document7 pagesCNC Shield For A4988vaxewiNo ratings yet
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- DC/DC Converter Operation GuideDocument6 pagesDC/DC Converter Operation GuidesaeidraminaNo ratings yet
- MC3479 Stepper Motor Driver: FeaturesDocument10 pagesMC3479 Stepper Motor Driver: FeaturesHenry CastandNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
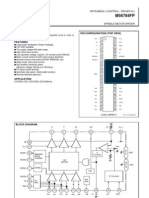
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocument11 pagesMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoNo ratings yet
- 110 Integrated Circuit Projects for the Home ConstructorFrom Everand110 Integrated Circuit Projects for the Home ConstructorRating: 4.5 out of 5 stars4.5/5 (2)
- LMD 18200Document14 pagesLMD 18200Itzamary Romero SosaNo ratings yet
- LMD18201 3A, 55V H-Bridge: General DescriptionDocument8 pagesLMD18201 3A, 55V H-Bridge: General DescriptionNairo FilhoNo ratings yet
- Motor Controller Data SheetDocument13 pagesMotor Controller Data Sheetapi-284769767No ratings yet
- 19 Current ControlDocument5 pages19 Current ControlZeshan LatifNo ratings yet
- Lect 4 PDFDocument14 pagesLect 4 PDFSaif AlabdullahNo ratings yet
- Lab 4: Stepper Motor Motion ControlDocument20 pagesLab 4: Stepper Motor Motion ControlShreesha BhaktaNo ratings yet
- Basic Building Blocks of Embedded System: Microcontroller: CPU, I/Os, Memory, Interrupts, Timers, CommunicationsDocument23 pagesBasic Building Blocks of Embedded System: Microcontroller: CPU, I/Os, Memory, Interrupts, Timers, CommunicationsRagini GuptaNo ratings yet
- A 2918 SW Data SheetDocument8 pagesA 2918 SW Data SheetGustavo LunaNo ratings yet
- LMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CDocument14 pagesLMD18201 3A, 55V H-Bridge: Literature Number: SNVS092CIrfan AbbasiNo ratings yet
- Analog Drive Control Module (DSZA)Document11 pagesAnalog Drive Control Module (DSZA)PradeepNo ratings yet
- Tda 4700Document21 pagesTda 4700lrohneNo ratings yet
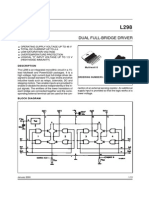
- L298 Dual Full-Bridge Driver IC for Motors and RelaysDocument12 pagesL298 Dual Full-Bridge Driver IC for Motors and RelaysBastian RamadhanNo ratings yet
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Document26 pagesFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherNo ratings yet
- Datasheet l298bDocument14 pagesDatasheet l298bgioganNo ratings yet
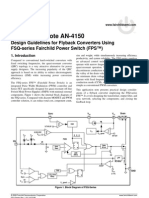
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Document16 pagesApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaNo ratings yet
- PWM ControllerDocument20 pagesPWM ControllerAmrit203No ratings yet
- Data Sheet L298 PDFDocument13 pagesData Sheet L298 PDFbaymax love spideyNo ratings yet
- GS D200 Stepper DrivesDocument17 pagesGS D200 Stepper DrivesFred BloggsNo ratings yet
- 1A Step-Down LED Driver Data SheetDocument12 pages1A Step-Down LED Driver Data SheetselocaNo ratings yet
- NJM3771D2Document9 pagesNJM3771D2mahdi elmayNo ratings yet
- 3ph Ac Motor ControlerDocument11 pages3ph Ac Motor Controleradamkam1111No ratings yet
- Protek B8110 User Instruction ManualDocument23 pagesProtek B8110 User Instruction ManualXray CrossingNo ratings yet
- LS7262C - L010547 - Lsi-Ls7260, Lsi-Ls7262Document7 pagesLS7262C - L010547 - Lsi-Ls7260, Lsi-Ls7262Funda HandaNo ratings yet
- PSU TSP3222 4pDocument4 pagesPSU TSP3222 4psajedaliNo ratings yet
- Dual Full-Bridge Driver: DescriptionDocument13 pagesDual Full-Bridge Driver: DescriptionBaher Bassem MorkosNo ratings yet
- TB6560 3axis Mach3 CNC Stepper Motor Controller Operation InstructionDocument18 pagesTB6560 3axis Mach3 CNC Stepper Motor Controller Operation InstructionAdelNo ratings yet
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDocument26 pagesVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksNo ratings yet
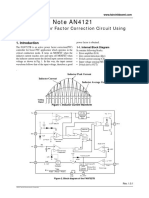
- Application Note AN4121: Design of Power Factor Correction Circuit Using FAN7527BDocument22 pagesApplication Note AN4121: Design of Power Factor Correction Circuit Using FAN7527BRicardo VieiraNo ratings yet
- COSTECH Accelration of Innovation ImbejuDocument42 pagesCOSTECH Accelration of Innovation Imbejuhamidumajid033No ratings yet
- Raft Foundations - Design & Analysis With A Practical Approach PDFDocument140 pagesRaft Foundations - Design & Analysis With A Practical Approach PDFemmanuel83% (6)
- August 2017Document72 pagesAugust 2017Treatment Plant Operator MagazineNo ratings yet
- RCE Unpacking Ebook (Translated by LithiumLi) - UnprotectedDocument2,342 pagesRCE Unpacking Ebook (Translated by LithiumLi) - Unprotecteddryten7507No ratings yet
- X-Span & Setting ToolsDocument18 pagesX-Span & Setting ToolsDenier RubianoNo ratings yet
- Model Railroad Plans and DrawingsDocument7 pagesModel Railroad Plans and DrawingsBán ZoltánNo ratings yet
- L04-L05 Parts 13-25-550 v05 42021Document84 pagesL04-L05 Parts 13-25-550 v05 42021Brandi HillNo ratings yet
- PMO ProceduresDocument21 pagesPMO ProceduresTariq JamalNo ratings yet
- MC 8051Document85 pagesMC 8051Sonu SatishNo ratings yet
- Sample Lab ReportDocument4 pagesSample Lab ReportHolley WrightNo ratings yet
- Eaton Tb09500001e PDFDocument62 pagesEaton Tb09500001e PDFJuan E Torres MNo ratings yet
- Managing ImapDocument408 pagesManaging ImapPriya RaoNo ratings yet
- Project Hydraulics and HydrologyDocument17 pagesProject Hydraulics and HydrologyEiyra NadiaNo ratings yet
- A1.2.3 Method Statement 4a Redacted Version2Document98 pagesA1.2.3 Method Statement 4a Redacted Version2ChanelNo ratings yet
- Control and On-Off Valves GuideDocument87 pagesControl and On-Off Valves Guidebaishakhi_b90100% (3)
- Paint Color Comparison ChartDocument132 pagesPaint Color Comparison ChartCarlos Rubiños AlonsoNo ratings yet
- Ref Paper 2Document4 pagesRef Paper 2Subhanjali MyneniNo ratings yet
- KSB Megaflow V: Pumps For Sewage, Effuents and MisturesDocument18 pagesKSB Megaflow V: Pumps For Sewage, Effuents and MisturesKorneliusNo ratings yet
- Answers About HubSpotDocument1 pageAnswers About HubSpotPrasetyaNo ratings yet
- Template Icme 13 PosterDocument1 pageTemplate Icme 13 PosterZulma Xiomara Rueda GarciaNo ratings yet
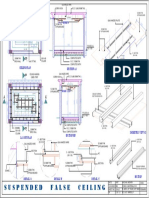
- Gypsum Ceiling PDFDocument1 pageGypsum Ceiling PDFAanchal Mishra100% (1)
- INFRARED BASED VISITOR COUNTER TECHNOLOGYDocument21 pagesINFRARED BASED VISITOR COUNTER TECHNOLOGYRahul KumarNo ratings yet
- Brake Pedals and ValveDocument4 pagesBrake Pedals and Valveala17No ratings yet
- Oracle Baseline Security ChecklistDocument15 pagesOracle Baseline Security ChecklistChidi OkerekeNo ratings yet
- bbk-lt2614-lt3214 Service Manual PDFDocument42 pagesbbk-lt2614-lt3214 Service Manual PDFrj arcinasNo ratings yet
- IG 55 CalculationDocument11 pagesIG 55 CalculationNoridhamNo ratings yet
- Shipping Label GuideDocument41 pagesShipping Label GuidebriggantiiNo ratings yet
- Panasonic WJ FS616Document62 pagesPanasonic WJ FS616triliteNo ratings yet
- How To Choose Food StarchesDocument20 pagesHow To Choose Food StarchesBoat Tanin100% (3)
- Newsletter Template NewDocument4 pagesNewsletter Template Newapi-458544253No ratings yet