You might also like
- Kerr Effect ExpDocument13 pagesKerr Effect ExpAia KwNo ratings yet
- Magnetic Effects of Electric CurrentDocument4 pagesMagnetic Effects of Electric CurrentXxxxxxNo ratings yet
- Bifilar Suspension and Auxilliary MassDocument10 pagesBifilar Suspension and Auxilliary Massvinayak_ranjanNo ratings yet
- Ec8451 Emf Lecture NotesDocument61 pagesEc8451 Emf Lecture NotesNarenthra BaalaNo ratings yet
- R-15 Iv-Ii Sem Question BankDocument21 pagesR-15 Iv-Ii Sem Question BankAryan Hrushik SharmaNo ratings yet
- Hexco March 2013 Engineering MathsDocument3 pagesHexco March 2013 Engineering MathsNdumiso MoyoNo ratings yet
- Mat Kpsea 2023 PredictionsDocument34 pagesMat Kpsea 2023 PredictionsAbdallah100% (1)
- Khwaja Fareed University of Engineering and Information Technology (Kfueit)Document6 pagesKhwaja Fareed University of Engineering and Information Technology (Kfueit)waqarNo ratings yet
- Mesh Node AnalysisDocument35 pagesMesh Node AnalysisjashmithajanuNo ratings yet
- Current Electricity (Unit: Ii) : One Mark QuestionsDocument13 pagesCurrent Electricity (Unit: Ii) : One Mark Questionsmechanical_lecturer100% (1)
- Magneto Hydro Dynamics (MHD) Power Generation: 16S-Me-Ense-03)Document20 pagesMagneto Hydro Dynamics (MHD) Power Generation: 16S-Me-Ense-03)Ans ahmedNo ratings yet
- Revision Sheet MYP 4Document10 pagesRevision Sheet MYP 4Manan SachdevaNo ratings yet
- OCR S1 Notes Permutations and CombinationsDocument8 pagesOCR S1 Notes Permutations and CombinationsJon HadleyNo ratings yet
- EC2403 - RF and Microwave Engineering Que PDFDocument7 pagesEC2403 - RF and Microwave Engineering Que PDFkhyatichavdaNo ratings yet
- Network Theorms ProblemsDocument14 pagesNetwork Theorms ProblemsVinod Shanker ShringiNo ratings yet
- ECSE4040RI Syllabus-S21Document6 pagesECSE4040RI Syllabus-S21TahmidAzizAbirNo ratings yet
- Optical Communication Question BankDocument24 pagesOptical Communication Question BankdhivyakrishnaNo ratings yet
- Experiment No.-4: Stefan'S LawDocument4 pagesExperiment No.-4: Stefan'S LawRajat Panda100% (2)
- Physics XII Practice PaperDocument10 pagesPhysics XII Practice PaperAvinashNo ratings yet
- Circle Theorems (Advanced) - No Reasons Required - 1Document4 pagesCircle Theorems (Advanced) - No Reasons Required - 1Amro GenawiNo ratings yet
- Chen PDFDocument345 pagesChen PDFAjay BalasaNo ratings yet
- Current & Charge Calculations WorksheetDocument8 pagesCurrent & Charge Calculations WorksheetSumolmal SrisukriNo ratings yet
- Cbse Class XI Physics Chapter 1 Class TestDocument3 pagesCbse Class XI Physics Chapter 1 Class TestroythomascNo ratings yet
- Edexcel S2 Cheat SheetDocument12 pagesEdexcel S2 Cheat Sheetsushdhake5009No ratings yet
- Phys 125 Pex 5Document9 pagesPhys 125 Pex 5Richard OuNo ratings yet
- DP 1 AA HL Partial FractionsDocument70 pagesDP 1 AA HL Partial FractionsSundarNo ratings yet
- Centripetal Force Multiple Choice QuestionsDocument3 pagesCentripetal Force Multiple Choice QuestionsMalaika ChaudharyNo ratings yet
- Experiment 2 3-Phase MeasurementDocument10 pagesExperiment 2 3-Phase MeasurementSaraha AloNo ratings yet
- 7540 GCE O Physics MSC 20080807Document35 pages7540 GCE O Physics MSC 20080807mustafa27No ratings yet
- Phys 1121 Kinematic NotesDocument17 pagesPhys 1121 Kinematic NoteshardkntNo ratings yet
- 18PYB103J Unit I Question BankDocument5 pages18PYB103J Unit I Question Banksrinivas50% (2)
- Examples - PhysicsDocument8 pagesExamples - Physicslaila1001No ratings yet
- EMI Q BankDocument21 pagesEMI Q BankShiv KumarNo ratings yet
- SLMCC 2010 PaperDocument1 pageSLMCC 2010 PaperIshamael Snook100% (1)
- Lecture 6 - Optical Fiber Communication Ray Theory Revision and NumericalsDocument8 pagesLecture 6 - Optical Fiber Communication Ray Theory Revision and NumericalssamarthNo ratings yet
- Injso2016 QuestionDocument22 pagesInjso2016 Questionharish sankaranarayananNo ratings yet
- Extended Paper 2 May 00Document12 pagesExtended Paper 2 May 00Mari Carmen Pérez GómezNo ratings yet
- Expt 2 - Measurement of Numerical Aperture - Week 3 - Optical Fiber CommunicationDocument4 pagesExpt 2 - Measurement of Numerical Aperture - Week 3 - Optical Fiber CommunicationsamarthNo ratings yet
- Bistable and Astable CircuitsDocument2 pagesBistable and Astable CircuitsIbrahim Sheikh100% (1)
- STP Math 2ADocument419 pagesSTP Math 2AYamin Wael ElattalNo ratings yet
- 75 - Physics 2nd Year PDFDocument11 pages75 - Physics 2nd Year PDFMahmud Rahman BizoyNo ratings yet
- PC To PC Data CommDocument41 pagesPC To PC Data CommParshant GargNo ratings yet
- A-Level Revision Notes - 01 Computer ArchitectureDocument17 pagesA-Level Revision Notes - 01 Computer ArchitectureMugerwa CharlesNo ratings yet
- Some Problems On Quantitative Techniques in BusinessDocument16 pagesSome Problems On Quantitative Techniques in BusinessChao khanNo ratings yet
- IMC GeometryDocument8 pagesIMC GeometryJane ChangNo ratings yet
- 15IF11 Multicore E PDFDocument14 pages15IF11 Multicore E PDFRakesh VenkatesanNo ratings yet
- UIMO Sample Questions for Class 3 Math and ReasoningDocument5 pagesUIMO Sample Questions for Class 3 Math and ReasoningreeyaanshbirlaNo ratings yet
- Microprocessor and Interface Systems OverviewDocument71 pagesMicroprocessor and Interface Systems OverviewExa AkbarNo ratings yet
- Young'S Modulus by Non-Uniform Bending Expt - No: Date: AimDocument11 pagesYoung'S Modulus by Non-Uniform Bending Expt - No: Date: AimDhruvesh Mathur100% (1)
- Chapter 8 Emagnet Teacher - EditedDocument46 pagesChapter 8 Emagnet Teacher - EditedSuadrifRunDamahum100% (1)
- HCF LCM Squre RootsDocument0 pagesHCF LCM Squre RootsCh Saqib NazirNo ratings yet
- StudenttextDocument18 pagesStudenttextapi-195130729No ratings yet
- Inverted PendulumDocument71 pagesInverted PendulumShruti100% (1)
- Lab 8 Conservation of Energy KineticDocument3 pagesLab 8 Conservation of Energy KineticAndrew GomezNo ratings yet
- SCS-500 Multi-Functional Dynamics SystemDocument12 pagesSCS-500 Multi-Functional Dynamics SystemTamaraNo ratings yet
- Project PresentationDocument17 pagesProject PresentationLong Trần QuangNo ratings yet
- Electric Catapult Design and Optimization: OverviewDocument8 pagesElectric Catapult Design and Optimization: OverviewThịnh PhanNo ratings yet
- Design of Deployment Mechanism of Solar Array of A Sample Satellite and Investigation of Deployment On Control Attitude of SatelliteDocument5 pagesDesign of Deployment Mechanism of Solar Array of A Sample Satellite and Investigation of Deployment On Control Attitude of SatelliteShoaib IqbalNo ratings yet
- Mechanical Engineering GATE/IES Postal Course Books CollectionDocument3 pagesMechanical Engineering GATE/IES Postal Course Books CollectionJaya Harshit50% (2)
- Wcee2012 4133Document10 pagesWcee2012 4133toyi kamiNo ratings yet
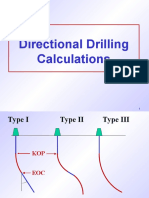
- Calculation Equations For Directional DrillingDocument79 pagesCalculation Equations For Directional DrillingPhilosopher Doctor100% (3)
- How Bolt Patterns React To External LoadsDocument4 pagesHow Bolt Patterns React To External Loadssmercado50No ratings yet
- Worm Gear Calculation PDFDocument19 pagesWorm Gear Calculation PDFvrushabhNo ratings yet
- M.K.Trading & M.K.Trading & M.K.Trading & M.K.Trading & Cont. Co.L.L.C Cont. Co.L.L.C Cont. Co.L.L.C Cont. Co.L.L.CDocument3 pagesM.K.Trading & M.K.Trading & M.K.Trading & M.K.Trading & Cont. Co.L.L.C Cont. Co.L.L.C Cont. Co.L.L.C Cont. Co.L.L.Ccheligp1981No ratings yet
- Plant Pumps Guide: Hydraulic Calculation MethodsDocument67 pagesPlant Pumps Guide: Hydraulic Calculation MethodsNivas SadhasivamNo ratings yet
- MOVERS ACADEMY FIRST QUARTER EXAMDocument3 pagesMOVERS ACADEMY FIRST QUARTER EXAMRain Vicente100% (1)
- Study Material Machine DesignDocument98 pagesStudy Material Machine DesignOxy GenNo ratings yet
- Magnetostatics and Magnetic Fields ExplainedDocument5 pagesMagnetostatics and Magnetic Fields ExplainedAwais YousafNo ratings yet
- Example Problems On Static EquilibriumDocument5 pagesExample Problems On Static Equilibrium-Manvendra Pratap Singh-No ratings yet
- Daily Practice Problems Chapter Provides Accurate Physics PracticeDocument4 pagesDaily Practice Problems Chapter Provides Accurate Physics PracticePritam kumar100% (1)
- Experimental Thermal and Fluid Science: A.L. Neckel, M. GodinhoDocument10 pagesExperimental Thermal and Fluid Science: A.L. Neckel, M. GodinhoPett PeeveNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityKing BossNo ratings yet
- Unit 3 One Marks QuestionsDocument6 pagesUnit 3 One Marks QuestionsRahulNo ratings yet
- Motion Along A Straight LineDocument8 pagesMotion Along A Straight LineSiti HasanahNo ratings yet
- Fisika - Physics For High SchoolDocument396 pagesFisika - Physics For High SchoolZainal AbidinNo ratings yet
- Physics WorksheetsDocument7 pagesPhysics Worksheetsabdullah sheikhNo ratings yet
- Physics 71 1 Long Sample ExamDocument4 pagesPhysics 71 1 Long Sample ExamManna Pinto100% (1)
- Shell and TubeDocument66 pagesShell and TubeEdgar Enrique Diaz Marquina0% (1)
- 2 - FLDS 385 Chapter 2 Principles of HydraulicsDocument47 pages2 - FLDS 385 Chapter 2 Principles of HydraulicsAvneet MultaniNo ratings yet
- Chapter 2 Basics For A Single-Degree-of-Freedom RotorDocument29 pagesChapter 2 Basics For A Single-Degree-of-Freedom RotorMohammed SaeedNo ratings yet
- Bending ThesisDocument5 pagesBending Thesiselizabethandersonlittlerock100% (2)
- Velocity Acceleration Graphing QuizDocument4 pagesVelocity Acceleration Graphing QuizkannaydarNo ratings yet
- George Haller - Transport Barriers and Coherent Structures in Flow Data - Advective, Diffusive, Stochastic and Active Methods-Cambridge University Press (2023)Document427 pagesGeorge Haller - Transport Barriers and Coherent Structures in Flow Data - Advective, Diffusive, Stochastic and Active Methods-Cambridge University Press (2023)Cesar RosalesNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological UniversityBhardwaj UpadhyayNo ratings yet
- Load rating guidance for bolted and riveted gusset platesDocument48 pagesLoad rating guidance for bolted and riveted gusset platesSaeedNo ratings yet
- Rensen BDocument103 pagesRensen Branjitv10No ratings yet
- 21st Century Dam Design - Advances and AdaptionsDocument18 pages21st Century Dam Design - Advances and AdaptionsSimoncklohNo ratings yet
- Full-Range Stress-Strain Curves For Stainless SteelDocument15 pagesFull-Range Stress-Strain Curves For Stainless SteelNurul HudaNo ratings yet