You might also like
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeFrom EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeNo ratings yet
- Vale Salida AlmacenDocument4 pagesVale Salida AlmacenMartha Elizabeth Barrios VazquezNo ratings yet
- 4-001contador ProgramableDocument11 pages4-001contador ProgramableDiego LaviniNo ratings yet
- Informe Pic 16f84aDocument10 pagesInforme Pic 16f84aArmando Nahuelneri MuñozNo ratings yet
- Para Que Nuestro Pic Funcione FísicamenteDocument7 pagesPara Que Nuestro Pic Funcione FísicamenteAna Suggey100% (1)
- Cuestionario Electrónica Digital AplicadaDocument6 pagesCuestionario Electrónica Digital AplicadaCarlos MartinezNo ratings yet
- Descripcion Pic 16F877ADocument9 pagesDescripcion Pic 16F877AAndres Camilo RubianoNo ratings yet
- Pic 16f877a PaperDocument5 pagesPic 16f877a PaperVíctor JiménezNo ratings yet
- Laboratorio N°3 MicroprocesadoresDocument34 pagesLaboratorio N°3 MicroprocesadoresIshmael AcevedoNo ratings yet
- Compuertas Logicas Con Tecnologia TTLDocument11 pagesCompuertas Logicas Con Tecnologia TTLjose_sanguino_2No ratings yet
- Micro Lab1Document9 pagesMicro Lab1Alex MercerNo ratings yet
- Reporte - Examen Unidad 1 y 2Document18 pagesReporte - Examen Unidad 1 y 2German RodriguezNo ratings yet
- PIC16F877A: Universidad de Las Fuerzas Armadas (Espe-L)Document3 pagesPIC16F877A: Universidad de Las Fuerzas Armadas (Espe-L)alexisltgaNo ratings yet
- Control de Velocidad Motor DCDocument21 pagesControl de Velocidad Motor DCzombey22No ratings yet
- MicrocontroladoresDocument25 pagesMicrocontroladoresRaùl Alejandro Paredes de la CruzNo ratings yet
- Reporte Proyecto PIC16F877A MicrocontroladorDocument30 pagesReporte Proyecto PIC16F877A MicrocontroladorGerman RodriguezNo ratings yet
- Tutorial para Dummies PICDocument173 pagesTutorial para Dummies PICPruebas MessNo ratings yet
- Exposicion PIC 16f84Document37 pagesExposicion PIC 16f84Jairo PadronNo ratings yet
- Pic 16f628aDocument8 pagesPic 16f628aFëër EssiNo ratings yet
- MicrocontroladorDocument5 pagesMicrocontroladorAuriannys ArteagaNo ratings yet
- Tutorial PIC16F877A (Algunas Mejoras)Document26 pagesTutorial PIC16F877A (Algunas Mejoras)rodrick7790% (10)
- ELT3822A Tema3 Características Del Microcontrolador PIC16F84A 2222 PDFDocument73 pagesELT3822A Tema3 Características Del Microcontrolador PIC16F84A 2222 PDFAlejandro Enrique H. AlanesNo ratings yet
- Trabajo Final Informática II - Secuenciador de 16 EfectosDocument27 pagesTrabajo Final Informática II - Secuenciador de 16 EfectosNelson Fortunatti50% (2)
- PLC AUTÓMATAS PROGRAMABLESDocument21 pagesPLC AUTÓMATAS PROGRAMABLESHéctor de los Ojos Barroso100% (1)
- Microcontroladores PIC16F873Document10 pagesMicrocontroladores PIC16F873Cesar LaraNo ratings yet
- Exposicion MicrocontroladoresDocument33 pagesExposicion MicrocontroladoresRosita Mtz SNo ratings yet
- PIC16F877A: Características y aplicaciones del microcontroladorDocument3 pagesPIC16F877A: Características y aplicaciones del microcontroladorivan yesid becerraNo ratings yet
- Contador Programable 4 Digitos Ascendente y Descendente N 4-100 PDFDocument11 pagesContador Programable 4 Digitos Ascendente y Descendente N 4-100 PDFPablo Diego Cecere CasadoNo ratings yet
- PIC16F877Document11 pagesPIC16F877Carlos OrtegaNo ratings yet
- Tutorial PIC16F877A Algunas MejorasDocument26 pagesTutorial PIC16F877A Algunas MejorasJose Luis Sovero AstoamanNo ratings yet
- Microcontroladores para Proyecto de Sistema de RiegoDocument51 pagesMicrocontroladores para Proyecto de Sistema de RiegoMichael PetersNo ratings yet
- Microcontroladores PIC (TUTORIAL)Document100 pagesMicrocontroladores PIC (TUTORIAL)Javier Sanchez MojicaNo ratings yet
- Programación de Microcontroladores PIC (Aplicación)Document29 pagesProgramación de Microcontroladores PIC (Aplicación)Alejandro Hernandez Lopez100% (1)
- Laboratorio N°3 MicroprocesadoresDocument20 pagesLaboratorio N°3 MicroprocesadoresIshmael AcevedoNo ratings yet
- Pic 16877Document16 pagesPic 16877reatekNo ratings yet
- Microprocesador PicDocument8 pagesMicroprocesador PicYonni RosasNo ratings yet
- Microcontroladores de Ingenieria Electronica Automatización Unidad 1 URBE O-713 O-723Document22 pagesMicrocontroladores de Ingenieria Electronica Automatización Unidad 1 URBE O-713 O-723Luis SánchezNo ratings yet
- El Microprocesador 8085Document11 pagesEl Microprocesador 8085neptuno97No ratings yet
- Pic 16 F628Document23 pagesPic 16 F628Ariel Godoy67% (3)
- INFORME Sensor HallDocument8 pagesINFORME Sensor HallWaniel Calvache100% (1)
- El Microcontrolador Pic16f876 FinalDocument6 pagesEl Microcontrolador Pic16f876 FinalArmando Castro FloresNo ratings yet
- Curso Basico de Pic16f877 PDFDocument140 pagesCurso Basico de Pic16f877 PDFANGEL RICARDO LICONA RODRIGUEZNo ratings yet
- Practica#2 Contador0-9Document11 pagesPractica#2 Contador0-9bryanNo ratings yet
- Microcontroladores 2018Document29 pagesMicrocontroladores 2018julieth bautistaNo ratings yet
- Definición de MicrocontroladorDocument4 pagesDefinición de Microcontroladorsamuel MoralesNo ratings yet
- Capitulo 2Document12 pagesCapitulo 2Misael HernándezNo ratings yet
- Clase Del Curso de PLC 2013Document36 pagesClase Del Curso de PLC 2013triac135100% (1)
- Sistemas Digitales-Pic 16f84 de MicrochipDocument28 pagesSistemas Digitales-Pic 16f84 de Microchipmci89No ratings yet
- Pic 16 F 2550Document9 pagesPic 16 F 2550Jhon RgbNo ratings yet
- invest2caratulaDocument7 pagesinvest2caratulaRaulitoNo ratings yet
- Evolupic Bootloader 16f88 Manual v.1Document29 pagesEvolupic Bootloader 16f88 Manual v.1Jose Diaz PavonNo ratings yet
- Equipo 6 Practica 10Document27 pagesEquipo 6 Practica 10Jorge david Flores CruzNo ratings yet
- Clase 9 El MICROCONTROLADOR - Familia PIC 16xxxDocument28 pagesClase 9 El MICROCONTROLADOR - Familia PIC 16xxxMilton100% (2)
- Curso Microcontrolador PIC16F84Document45 pagesCurso Microcontrolador PIC16F84josetantonioNo ratings yet
- Características y componentes de los microcontroladoresDocument6 pagesCaracterísticas y componentes de los microcontroladoresFran VegaNo ratings yet
- Estructura Del MicrocontroladorDocument13 pagesEstructura Del MicrocontroladorConcepcion Jeronimo Hernandez0% (1)
- 100 circuitos de shields para arduino (español)From Everand100 circuitos de shields para arduino (español)Rating: 3.5 out of 5 stars3.5/5 (3)
- Prácticas de redes de datos e industrialesFrom EverandPrácticas de redes de datos e industrialesRating: 4 out of 5 stars4/5 (5)
- Nociones y Conceptos Básicos de ElectricidadDocument2 pagesNociones y Conceptos Básicos de ElectricidadPiscoya Sánchez JavierNo ratings yet
- Qué Es Que Es InternetDocument2 pagesQué Es Que Es InternetPiscoya Sánchez JavierNo ratings yet
- RETO EPT Semana 21 - 1°Document1 pageRETO EPT Semana 21 - 1°Piscoya Sánchez JavierNo ratings yet
- s15 Sec 4 Guia Ept Dia 4 5Document7 pagess15 Sec 4 Guia Ept Dia 4 5Piscoya Sánchez JavierNo ratings yet
- Por Qué Es Importante Conocer Los Símbolos ElectrónicosDocument1 pagePor Qué Es Importante Conocer Los Símbolos ElectrónicosPiscoya Sánchez JavierNo ratings yet
- Alarma Contra LadronesDocument2 pagesAlarma Contra LadronesPiscoya Sánchez JavierNo ratings yet
- Lista de Materiales Alarma Contra LadronesDocument1 pageLista de Materiales Alarma Contra LadronesPiscoya Sánchez JavierNo ratings yet
- Escritura y Lectura MemoryDocument2 pagesEscritura y Lectura MemoryPiscoya Sánchez JavierNo ratings yet
- PresupuestoDocument4 pagesPresupuestoPiscoya Sánchez JavierNo ratings yet
- MODULODocument2 pagesMODULOPiscoya Sánchez JavierNo ratings yet
- Por Qué Es Importante Conocer Los Símbolos ElectrónicosDocument1 pagePor Qué Es Importante Conocer Los Símbolos ElectrónicosPiscoya Sánchez JavierNo ratings yet
- Practica 2Document2 pagesPractica 2Piscoya Sánchez JavierNo ratings yet
- Métodos Especiales para El Área TecnológicaDocument12 pagesMétodos Especiales para El Área TecnológicajavichocixNo ratings yet
- PASIÓNDocument3 pagesPASIÓNPiscoya Sánchez JavierNo ratings yet
- Qué Es Que Es InternetDocument2 pagesQué Es Que Es InternetPiscoya Sánchez JavierNo ratings yet
- Alarma Contra LadronesDocument2 pagesAlarma Contra LadronesPiscoya Sánchez Javier100% (1)
- UnDocument6 pagesUnPiscoya Sánchez JavierNo ratings yet
- CASODocument2 pagesCASOPiscoya Sánchez JavierNo ratings yet
- CASODocument1 pageCASOPiscoya Sánchez JavierNo ratings yet
- ConductoresDocument2 pagesConductoresPiscoya Sánchez JavierNo ratings yet
- ArtículoDocument12 pagesArtículoPiscoya Sánchez JavierNo ratings yet
- Comenzado ElDocument9 pagesComenzado ElPiscoya Sánchez JavierNo ratings yet
- Archivo EditableDocument1 pageArchivo EditablePiscoya Sánchez JavierNo ratings yet
- UnDocument6 pagesUnPiscoya Sánchez JavierNo ratings yet
- CasoDocument2 pagesCasoPiscoya Sánchez JavierNo ratings yet
- Conductor EsDocument2 pagesConductor EsPiscoya Sánchez JavierNo ratings yet
- Actividadades: Resistencias Y Código de ColoresDocument1 pageActividadades: Resistencias Y Código de ColoresPiscoya Sánchez JavierNo ratings yet
- Por Qué Cree Que El Programa AutoCAD Es El Más Utilizado Por Los ArquitectosDocument1 pagePor Qué Cree Que El Programa AutoCAD Es El Más Utilizado Por Los ArquitectosPiscoya Sánchez JavierNo ratings yet
- Interruptor con aplausos y circuito navideñoDocument5 pagesInterruptor con aplausos y circuito navideñoPiscoya Sánchez JavierNo ratings yet
- Ohsas 18001Document1 pageOhsas 18001Piscoya Sánchez JavierNo ratings yet
- Importancia de La Inge en SoftwareDocument5 pagesImportancia de La Inge en SoftwareFreichaNo ratings yet
- 1.0 Formato - Ficha de Caracterización de Procesos - XLSX 1605Document1 page1.0 Formato - Ficha de Caracterización de Procesos - XLSX 1605ALVARO JAVIER HERNANDEZ QUITIANNo ratings yet
- Tarea 2 DevSoftwareLibre-JonasRomanEspaillat-100035092Document7 pagesTarea 2 DevSoftwareLibre-JonasRomanEspaillat-100035092Jonas RomanNo ratings yet
- TP 1 85% Algoritmo y Estructura de Datos IDocument5 pagesTP 1 85% Algoritmo y Estructura de Datos IJavierMartinezNo ratings yet
- Kontrol Glow G595Document14 pagesKontrol Glow G595DarkNicodemus SCNo ratings yet
- Practica 1 TBD Erwin LogicoDocument4 pagesPractica 1 TBD Erwin LogicoJulie AchoNo ratings yet
- Manual Mp3 en Castellano PDFDocument6 pagesManual Mp3 en Castellano PDFalcastellaniNo ratings yet
- El Mundo de La ProgramaciónDocument6 pagesEl Mundo de La Programaciónlizeth perezNo ratings yet
- Organizar y almacenar datos en bases de datos relacionales y no relacionalesDocument8 pagesOrganizar y almacenar datos en bases de datos relacionales y no relacionalesGuillermo HuamanNo ratings yet
- Principios Criptográficos FundamentalesDocument5 pagesPrincipios Criptográficos FundamentalesjamhyNo ratings yet
- Catalogo NCS PDFDocument12 pagesCatalogo NCS PDFpanamapuroNo ratings yet
- Capa Aplicacion Tcp/ipDocument18 pagesCapa Aplicacion Tcp/ipEmmanuel VélezNo ratings yet
- Algoritmos para calcular intereses, descuentos, funciones y sumas de dígitosDocument2 pagesAlgoritmos para calcular intereses, descuentos, funciones y sumas de dígitosLaudy MendivelsoNo ratings yet
- Formato Presentacion Documentos Normas IeeeDocument10 pagesFormato Presentacion Documentos Normas IeeeROGER STEVEEN ARMAS SIMBA�ANo ratings yet
- Enrutamiento Estatico y DinamicoDocument43 pagesEnrutamiento Estatico y DinamicoHerlan 2004No ratings yet
- Clonación de Disco Duro en 40 PasosDocument8 pagesClonación de Disco Duro en 40 PasosManuel Muñiz100% (1)
- Revision - Site ATP-CND01-CANDELARIA-Vr.5Document28 pagesRevision - Site ATP-CND01-CANDELARIA-Vr.5walter.diaz.molinaNo ratings yet
- Hoja de Datos - Promark 3Document6 pagesHoja de Datos - Promark 3Aura Yesenia SarmientoNo ratings yet
- Manual PositivoDocument26 pagesManual Positivovalkira03No ratings yet
- Manual Sedpic40Document26 pagesManual Sedpic40Jose Rivas Shango DeiNo ratings yet
- HojaVida FabianHolguin 2020 ActAbrilDocument4 pagesHojaVida FabianHolguin 2020 ActAbrilFABIAN ANTONIO HOLGUIN GUERRANo ratings yet
- Hoja de Vida Juandavid Cordoba2021Document2 pagesHoja de Vida Juandavid Cordoba2021Juandavid Jmc Cordoba HinestrozaNo ratings yet
- Softel Chedraui AcayucánDocument6 pagesSoftel Chedraui AcayucánLil GripNo ratings yet
- 0 X 040 ADocument5 pages0 X 040 AjonNo ratings yet
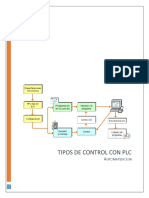
- Tipos de Control Con PLCDocument3 pagesTipos de Control Con PLCdoggo100% (1)
- 23 PDFDocument70 pages23 PDFDaniel AraujoNo ratings yet
- Cloud ComputingDocument11 pagesCloud Computingelimaldo098No ratings yet
- Transacciones by MundosapDocument5 pagesTransacciones by MundosapMauricio SoteloNo ratings yet
- Certificación del sistema eléctrico de aviónDocument4 pagesCertificación del sistema eléctrico de aviónManel Fernández PratNo ratings yet