You might also like
- Curso PLC OmronDocument359 pagesCurso PLC Omronlalo502100% (2)
- Curso general PLCsDocument48 pagesCurso general PLCsCarlos Fernandez SamanoNo ratings yet
- Omron 01Document48 pagesOmron 01david_amedNo ratings yet
- Omron 01Document48 pagesOmron 01marcelodias99No ratings yet
- Curso PLC OmronDocument79 pagesCurso PLC Omronmada2409No ratings yet
- Curso PLC Omron TMDocument359 pagesCurso PLC Omron TMJavier Rojas FranciaNo ratings yet
- Automata Omron PDFDocument373 pagesAutomata Omron PDFranciomanolo100% (1)
- Curso General de Autómatas Programables Industriales - OMRON PDFDocument359 pagesCurso General de Autómatas Programables Industriales - OMRON PDFpevare100% (5)
- Controladores Lógicos Programables (PLCDocument151 pagesControladores Lógicos Programables (PLCPilar Muñoz NitorNo ratings yet
- AvrDocument15 pagesAvrOmar BarrionuevoNo ratings yet
- Trabajo de Laboratorio #02a - Diseño Lógico (VF - 1) ActualDocument32 pagesTrabajo de Laboratorio #02a - Diseño Lógico (VF - 1) ActualMario HernandezNo ratings yet
- Apuntes de Sistemas DigitalesDocument76 pagesApuntes de Sistemas Digitalesjagm2000No ratings yet
- CAP. 1 Curso PLC OmronDocument61 pagesCAP. 1 Curso PLC OmronFreddy Torres100% (1)
- Electronica Digital MultiplexorDocument42 pagesElectronica Digital MultiplexorKelvin Montañez RodriguezNo ratings yet
- Practica No.5 - Sandoval Frias DavidDocument12 pagesPractica No.5 - Sandoval Frias DavidDavid Sandoval FriasNo ratings yet
- Clase 1Document24 pagesClase 1Felipe Fuentes ValenzuelaNo ratings yet
- S4,5 Sistemas Combinacionales en CIDocument19 pagesS4,5 Sistemas Combinacionales en CIantony bustamanteNo ratings yet
- Sistemas numéricos digitalesDocument180 pagesSistemas numéricos digitalesRicardo Ernesto Zapata CaroNo ratings yet
- Curso PLCDocument152 pagesCurso PLCposadaco86% (7)
- Electronica Digital 2023Document111 pagesElectronica Digital 2023GASTON SOLORZA LEYVANo ratings yet
- Investigación N°2Document59 pagesInvestigación N°2Andreita Rosas HurtadoNo ratings yet
- Circuitos digitales y sistemas numéricosDocument29 pagesCircuitos digitales y sistemas numéricosbertin91No ratings yet
- Introducción al control con PLC's: guía completaDocument29 pagesIntroducción al control con PLC's: guía completaItalo Leiva100% (1)
- Digital Circuits - Cap 01 - UtecDocument43 pagesDigital Circuits - Cap 01 - UteceddyNo ratings yet
- Tema 1. Códigos y Sistemas NuméricosDocument28 pagesTema 1. Códigos y Sistemas Numéricos80 SrNo ratings yet
- Sesion 2 - conceptos-SDDocument22 pagesSesion 2 - conceptos-SDirampuente96No ratings yet
- Sistemas digitales: magnitudes, sistemas de numeración y codificación binariaDocument56 pagesSistemas digitales: magnitudes, sistemas de numeración y codificación binariaReyniero Huancachoque QuispeNo ratings yet
- Tarea 1 - Electronica AnalogicaDocument24 pagesTarea 1 - Electronica AnalogicaBriana Jazmin Portilla HernandezNo ratings yet
- Informe MuxDocument22 pagesInforme MuxRaul Arturo Samaniego TelloNo ratings yet
- Practica 2.1 - Codificadores y DecodificadoresDocument7 pagesPractica 2.1 - Codificadores y DecodificadoresFabián Calzada DelgadoNo ratings yet
- Codigo Digitales PDFDocument40 pagesCodigo Digitales PDFJesus A Cruz SNo ratings yet
- Técnicas FEC y Códigos de ConvoluciónDocument29 pagesTécnicas FEC y Códigos de ConvoluciónJhon Rgb100% (1)
- 7.1 Arquitectura HarvardDocument48 pages7.1 Arquitectura HarvardLeandroTombettaNo ratings yet
- Contador VHDL Ascendente y DescendenteDocument7 pagesContador VHDL Ascendente y DescendenteDavid Sandoval FriasNo ratings yet
- Sistemas Digitales Power PointDocument16 pagesSistemas Digitales Power PointHaise KharinneNo ratings yet
- Sistemas Digitales I - TemarioDocument50 pagesSistemas Digitales I - TemarioAlex Arias CordovaNo ratings yet
- Preguntas de RepasoDocument8 pagesPreguntas de RepasoMei Geka-chan Bowen Calero40% (5)
- Sistema binario, digitalización y conversiones numéricasDocument18 pagesSistema binario, digitalización y conversiones numéricasborja benitoNo ratings yet
- Sistemas Digitales1Document34 pagesSistemas Digitales1carlota78No ratings yet
- Señales y Lógica Digital PDFDocument96 pagesSeñales y Lógica Digital PDFAnonymous q4oXB0z7gNo ratings yet
- Sistemas y Códigos PDFDocument8 pagesSistemas y Códigos PDFUriel ZapataNo ratings yet
- Se 123Document64 pagesSe 123César Murillo100% (1)
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeFrom EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeNo ratings yet
- Prácticas de redes de datos e industrialesFrom EverandPrácticas de redes de datos e industrialesRating: 4 out of 5 stars4/5 (5)
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208From EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208No ratings yet
- Metodología básica de instrumentación industrial y electrónicaFrom EverandMetodología básica de instrumentación industrial y electrónicaRating: 4 out of 5 stars4/5 (12)
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109From EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109No ratings yet
- Business Intelligence: Técnicas herramientas y aplicacionesFrom EverandBusiness Intelligence: Técnicas herramientas y aplicacionesNo ratings yet
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosFrom EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosRating: 5 out of 5 stars5/5 (5)
- Computación en la nube: Estrategias de cloud computing en las empresasFrom EverandComputación en la nube: Estrategias de cloud computing en las empresasNo ratings yet
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosFrom EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosRating: 4.5 out of 5 stars4.5/5 (14)
- Iniciación al diseño de circuitos impresos con Altium DesignerFrom EverandIniciación al diseño de circuitos impresos con Altium DesignerNo ratings yet
- ATS - Preguntas y opciones sobre Servicio de Tránsito AéreoDocument5 pagesATS - Preguntas y opciones sobre Servicio de Tránsito AéreoElardZúñigaNo ratings yet
- Cursos ESFap 2016Document12 pagesCursos ESFap 2016ElardZúñigaNo ratings yet
- Boletin 59 AeroleyDocument16 pagesBoletin 59 AeroleyElardZúñigaNo ratings yet
- Diseño de Una Subestación de Transformación para Tracción EléctricaDocument488 pagesDiseño de Una Subestación de Transformación para Tracción EléctricaElardZúñigaNo ratings yet
- PlafonesDocument12 pagesPlafonesRaul P. Cigarroa GomezNo ratings yet
- Como Funcionan Los BeaconsDocument7 pagesComo Funcionan Los BeaconsIma CorahuaNo ratings yet
- Planilla Registro PQR MajavitaDocument13 pagesPlanilla Registro PQR MajavitaLiseth RodriguezNo ratings yet
- Curso de GuitarraDocument32 pagesCurso de GuitarraPaulinho De Jesus100% (1)
- Horarios 2018 2019 Zsasir-ADocument1 pageHorarios 2018 2019 Zsasir-AMarcela GarciaNo ratings yet
- Avance Ing ControlDocument14 pagesAvance Ing ControlROMEL VALQUI RAMIREZNo ratings yet
- Concurso de matemática 1er año secundariaDocument2 pagesConcurso de matemática 1er año secundariaReynaldo Merino CordovaNo ratings yet
- Webinar Electricistas y ConstructoresDocument12 pagesWebinar Electricistas y Constructoresjose luis cadena sarmientoNo ratings yet
- Descubrimiento de Unidades Geometalurgicas Por Medio de Analisis de Conglomerados GeoestadisticoDocument151 pagesDescubrimiento de Unidades Geometalurgicas Por Medio de Analisis de Conglomerados GeoestadisticoDianela Medina TasillaNo ratings yet
- Circuit Collection - OscillatorsDocument23 pagesCircuit Collection - OscillatorsDarío ArmandoNo ratings yet
- Grh21cast PRCDocument19 pagesGrh21cast PRCDomingoNo ratings yet
- Presentación Capitulo 8Document52 pagesPresentación Capitulo 8Virgilio Fernando chavez100% (2)
- ¡REPELIS-VER Oppenheimer (2023) - Película Español y Latino: (ÚLTIMA ACTUALIZACIÓN: 28 de Julio de 2023)Document10 pages¡REPELIS-VER Oppenheimer (2023) - Película Español y Latino: (ÚLTIMA ACTUALIZACIÓN: 28 de Julio de 2023)Marcelo Matamala RuzNo ratings yet
- Apr-Fm-14 v1 Informe Final RuorDocument2 pagesApr-Fm-14 v1 Informe Final RuorCristian Alejandro Moreno CastilloNo ratings yet
- Informe Practica Ingenio CasiDocument82 pagesInforme Practica Ingenio CasidianaNo ratings yet
- Clase 1 Ingenieria Perforación Nguyen MarceloDocument64 pagesClase 1 Ingenieria Perforación Nguyen MarcelojhonatanNo ratings yet
- Proyecto StarDocument3 pagesProyecto StarDanielaPardoNo ratings yet
- Requisitos para Proyectos de Utilizacion en Media Tensión 19-02-2021Document2 pagesRequisitos para Proyectos de Utilizacion en Media Tensión 19-02-2021Juan RafaelNo ratings yet
- Laptop Compaq Presario CQ43-405, 14 - , E-300, 2GB, 500GB, Win 7 Home Basic, Negro - A7J27LA#ABM - IntercomprasDocument9 pagesLaptop Compaq Presario CQ43-405, 14 - , E-300, 2GB, 500GB, Win 7 Home Basic, Negro - A7J27LA#ABM - IntercomprasPaul RamirezNo ratings yet
- Act T4 Sergio HidalgoDocument4 pagesAct T4 Sergio HidalgoOziel VillarrealNo ratings yet
- Tecnologia EvaluacionDocument2 pagesTecnologia EvaluacionAlejandra DuqueNo ratings yet
- Índice de Desempeño LogísticoDocument24 pagesÍndice de Desempeño LogísticoEmilia AriasNo ratings yet
- Guia WikispacesDocument4 pagesGuia WikispacesSantos AlconNo ratings yet
- 1.1 Conceptos BásicosDocument13 pages1.1 Conceptos BásicosMarco Antonio Gómez SernaNo ratings yet
- Actividad #2 Ensayo "Herramientas Básicas de Calidad"Document5 pagesActividad #2 Ensayo "Herramientas Básicas de Calidad"Teleservicios ArizaNo ratings yet
- Trabajo de Mantenimiento AutónomoDocument2 pagesTrabajo de Mantenimiento Autónomojopoloco1No ratings yet
- Escargado Estudio-De-Caso-Clasificacion-De-InventariosDocument7 pagesEscargado Estudio-De-Caso-Clasificacion-De-InventariosAngelaNo ratings yet
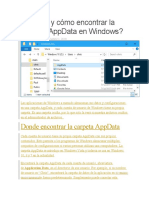
- ¿Qué Es y Cómo Encontrar La Carpeta AppData en WindowsDocument6 pages¿Qué Es y Cómo Encontrar La Carpeta AppData en WindowsAndres AamoNo ratings yet
- CMIC Mano Obra 2023Document16 pagesCMIC Mano Obra 2023promotora construonNo ratings yet
- Ficha Técnica Inoa GreenDocument2 pagesFicha Técnica Inoa GreenKlingon KlingonNo ratings yet