You might also like
- Enhanced Portfolio OptimizationDocument29 pagesEnhanced Portfolio Optimizationbaiq nurul SuryawatiNo ratings yet
- AbrogationDocument8 pagesAbrogationbaana2005No ratings yet
- Tambihul Ghaafileen Admonition For The NeglectfulDocument146 pagesTambihul Ghaafileen Admonition For The NeglectfulAbdullahNo ratings yet
- Qur'an Linguistic MiracleDocument4 pagesQur'an Linguistic Miraclehaqq92No ratings yet
- AbdulSalamMuhammadShukriPhDThesis ENG PDFDocument201 pagesAbdulSalamMuhammadShukriPhDThesis ENG PDFhendera1976100% (1)
- Review Shahab Ahmed What Is Islam The Im PDFDocument5 pagesReview Shahab Ahmed What Is Islam The Im PDFB Riaz AhmedNo ratings yet
- A Critical Study of Nahj Al-Balaghah (PHD, 1979) Syed Waris Hassan (266 Pages) PDFDocument266 pagesA Critical Study of Nahj Al-Balaghah (PHD, 1979) Syed Waris Hassan (266 Pages) PDFS⸫Ḥ⸫RNo ratings yet
- The Maslak of The Ulema of Deoband (English)Document36 pagesThe Maslak of The Ulema of Deoband (English)E-IQRA.INFONo ratings yet
- Verses in Quraan - WeakDocument8 pagesVerses in Quraan - Weakrevivingalislam100% (1)
- Riba - Nejatullah SiddiqiDocument162 pagesRiba - Nejatullah Siddiqizoom05tsaleem123No ratings yet
- Few DegreesDocument16 pagesFew DegreesarravindNo ratings yet
- Chapter No. 5 (Theory Notes)Document23 pagesChapter No. 5 (Theory Notes)Kashif MahmoodNo ratings yet
- Unit 1 Notes Aircraft Stability and Control NotesDocument18 pagesUnit 1 Notes Aircraft Stability and Control NotesMatthew RhoneyNo ratings yet
- Stellar Navigation 2 Swaruu Part 3 Extraterrestrial Ship Technology Taygeta PleiadesDocument6 pagesStellar Navigation 2 Swaruu Part 3 Extraterrestrial Ship Technology Taygeta Pleiades奇妙lingyiNo ratings yet
- Trajectory: Figure 1. Elements of A TrajectoryDocument2 pagesTrajectory: Figure 1. Elements of A TrajectoryKaran AggarwalNo ratings yet
- Traveling Plane WaveDocument2 pagesTraveling Plane WaveMaui ShihtzuNo ratings yet
- College of Engineering and Aeronautical TechnologyDocument6 pagesCollege of Engineering and Aeronautical TechnologyJohnzen Kim BaluyotNo ratings yet
- Drag Coefficient Prediction For Model RocketsDocument18 pagesDrag Coefficient Prediction For Model RocketsBeer_BaronNo ratings yet
- The Rattleback and The Magnus ForceDocument5 pagesThe Rattleback and The Magnus ForceFrederick David TombeNo ratings yet
- Things To Be RemeberedDocument4 pagesThings To Be RemeberedAishaBhattiNo ratings yet
- Ec6004 Unit 1 Satellite Orbits NotesDocument24 pagesEc6004 Unit 1 Satellite Orbits NotesKottai eswariNo ratings yet
- 1 Steady-State Tornado Vortex Models 2 The Rankine Combined VortexDocument14 pages1 Steady-State Tornado Vortex Models 2 The Rankine Combined VortexProton KhanNo ratings yet
- Aerodynamic of Finite WingDocument22 pagesAerodynamic of Finite WingchbeggyNo ratings yet
- VortexDocument8 pagesVortexZzPumpkingNo ratings yet
- Mekanika LanjutDocument7 pagesMekanika LanjutNur CahyaniNo ratings yet
- Assignment 2 Compare Travelling Wave and Standing Wave AntennasDocument3 pagesAssignment 2 Compare Travelling Wave and Standing Wave AntennassindhuraNo ratings yet
- Scan Nov 13, 2023Document21 pagesScan Nov 13, 2023SubhamPriyadarshan BeheraNo ratings yet
- Esci344 Lesson12 TC MotionDocument7 pagesEsci344 Lesson12 TC MotionSajjad Husham SalihNo ratings yet
- 01 RefractionDocument11 pages01 Refractionrad772004wa16No ratings yet
- Short Questions: Written/Composed By: - SHAHZAD IFTIKHAR Contact # 0313-5665666 WebsiteDocument13 pagesShort Questions: Written/Composed By: - SHAHZAD IFTIKHAR Contact # 0313-5665666 WebsiteFatima ObaidNo ratings yet
- AMT 113 GarciaDocument6 pagesAMT 113 GarciaJohnzen Kim BaluyotNo ratings yet
- Oblique Shock Wave - Mechanical Engineering DepartmentDocument9 pagesOblique Shock Wave - Mechanical Engineering DepartmentMohammed SalmanNo ratings yet
- 1.1 Introduction To Satellite Communication:: Unit I Satellite OrbitsDocument43 pages1.1 Introduction To Satellite Communication:: Unit I Satellite OrbitsJami ShifaNo ratings yet
- 4.3 Wave CharacteristicsDocument9 pages4.3 Wave CharacteristicsEesha SajidNo ratings yet
- 1972 Particle Motion On Oscillating Conveyors IDocument7 pages1972 Particle Motion On Oscillating Conveyors IУрош ИлићNo ratings yet
- Applications of Vector Analysis & PDEsDocument28 pagesApplications of Vector Analysis & PDEsmasoodNo ratings yet
- Interactive ReadingDocument6 pagesInteractive ReadingMona Mohamed SafwatNo ratings yet
- Wave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasDocument20 pagesWave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, Madrasاحمد حافظNo ratings yet
- MA-101 ProjectDocument14 pagesMA-101 ProjectMohul KatyalNo ratings yet
- Waves Contd...Document4 pagesWaves Contd...Muhammad Asghar KhanNo ratings yet
- Oscillations: Simple Harmonic MotionDocument31 pagesOscillations: Simple Harmonic MotiondrfefvdsfNo ratings yet
- 12.13. Longitudinal, Transverse WavesDocument6 pages12.13. Longitudinal, Transverse WavesSalmanNo ratings yet
- Gyroscope - Gyroscopic Effects On The Movement Of: Airplanes and Ships - Gyroscope StabilizationDocument25 pagesGyroscope - Gyroscopic Effects On The Movement Of: Airplanes and Ships - Gyroscope StabilizationAbdur Rahman100% (1)
- On The Galloping Instability of Two-Dimensional Bodies Having Elliptical Cross-SectionsDocument11 pagesOn The Galloping Instability of Two-Dimensional Bodies Having Elliptical Cross-SectionsAndreea MunteanuNo ratings yet
- Vorticity PDFDocument16 pagesVorticity PDFrahpooye313No ratings yet
- SatComm Lec5Document21 pagesSatComm Lec5ishac kayaNo ratings yet
- Satellite Communication: Topic: Orbit DynamicsDocument18 pagesSatellite Communication: Topic: Orbit DynamicsMohit SharmaNo ratings yet
- Banked Curves ReportDocument32 pagesBanked Curves Reportfrancisco bordey viernesNo ratings yet
- Chapter 6-MOmentum Analysis of Flow SystemsDocument49 pagesChapter 6-MOmentum Analysis of Flow SystemsSalvador Vargas-DiazNo ratings yet
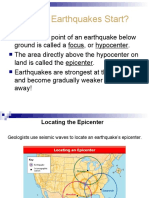
- Where Do Earthquakes Start?Document22 pagesWhere Do Earthquakes Start?diksha singhNo ratings yet
- An Moplil GasdewsDocument22 pagesAn Moplil GasdewsSanthosh PNo ratings yet
- NPL Some Properties of LightDocument10 pagesNPL Some Properties of LightMauroNo ratings yet
- Ocm Dynamic StabilityDocument26 pagesOcm Dynamic StabilityZeeshan KhanNo ratings yet
- Seminar and Technical WritingDocument5 pagesSeminar and Technical WritingRubal ChandraNo ratings yet
- GyroDocument14 pagesGyroatinder13No ratings yet
- Aerodynamics Interesting StuffDocument4 pagesAerodynamics Interesting StuffnileshraneNo ratings yet
- Shock WaveDocument9 pagesShock Wave224883061No ratings yet
- Mechanical Vibration CEPDocument15 pagesMechanical Vibration CEPUsMan WarraichNo ratings yet
- Ansys Installation ProcedureDocument2 pagesAnsys Installation ProcedureN. SWAROOP KUMAR100% (1)
- Ansys Installation ProcedureDocument2 pagesAnsys Installation ProcedureN. SWAROOP KUMAR100% (1)
- C (From: Greek Information Past Historians Narrative Objectively Cause and EffectDocument6 pagesC (From: Greek Information Past Historians Narrative Objectively Cause and EffectN. SWAROOP KUMARNo ratings yet
- Round Table On Instrumentation and Data ProcessingDocument13 pagesRound Table On Instrumentation and Data ProcessingN. SWAROOP KUMARNo ratings yet
- SSTODocument4 pagesSSTON. SWAROOP KUMARNo ratings yet
- Final Structure LabDocument18 pagesFinal Structure LabN. SWAROOP KUMARNo ratings yet
- Helicopter Engg by Lalit GuptaDocument66 pagesHelicopter Engg by Lalit GuptaN. SWAROOP KUMAR0% (1)
- A New Method of Atmospheric Reentry For Space ShipsDocument7 pagesA New Method of Atmospheric Reentry For Space ShipsN. SWAROOP KUMARNo ratings yet
- Air Traffic Control: Deepak KaruppiahDocument16 pagesAir Traffic Control: Deepak KaruppiahIsmail GulzarviNo ratings yet
- OOMSCharts PDFDocument14 pagesOOMSCharts PDFAakif AmeenNo ratings yet
- Information Manual EA400Document461 pagesInformation Manual EA400Zian Van DeventerNo ratings yet
- Training and Procedure Manual: Directorate of Airspace and Air Navigation Services StandardsDocument76 pagesTraining and Procedure Manual: Directorate of Airspace and Air Navigation Services StandardsSanchit GoelNo ratings yet
- Ops-Cat Sorulari Atplde OlmayanDocument10 pagesOps-Cat Sorulari Atplde OlmayanTayfun TUNAERNo ratings yet
- DeHav Dash 8 AMM CH06Document72 pagesDeHav Dash 8 AMM CH06jmcaero100% (1)
- Athena Vortex Lattice (AVL) User GuideDocument40 pagesAthena Vortex Lattice (AVL) User Guide12654789100% (1)
- All ABC QuestionsDocument45 pagesAll ABC QuestionsOmar NegmNo ratings yet
- Formation Navy T34 Primary Formation Manual PDFDocument118 pagesFormation Navy T34 Primary Formation Manual PDFPatrick Miceli100% (1)
- LZTTDocument13 pagesLZTTMáté SzászNo ratings yet
- LYCAR - Part 47issue2 - Dec 2017Document23 pagesLYCAR - Part 47issue2 - Dec 2017EssamNo ratings yet
- Spin Launch System Parten ProgrammeDocument1 pageSpin Launch System Parten ProgrammeLebi AntonyNo ratings yet
- Operator Proficiency Check - 01.06.2016Document2 pagesOperator Proficiency Check - 01.06.2016Anna Ivanova0% (1)
- Line Training For RHS Boeing 737 ClassicDocument6 pagesLine Training For RHS Boeing 737 Classicekalaya djuandaNo ratings yet
- Verse 2 Kunci JawabanDocument7 pagesVerse 2 Kunci Jawabanops HalimNo ratings yet
- Thirteenth Semiannual Report To CongressDocument277 pagesThirteenth Semiannual Report To CongressBob Andrepont100% (2)
- Analysis of Flight Performance and Stability of Family of Transport Airplane Designs With Fuselage CommonalitiesDocument8 pagesAnalysis of Flight Performance and Stability of Family of Transport Airplane Designs With Fuselage CommonalitiesMAZEN ABDELSAYEDNo ratings yet
- Accident Incident Report Form GARUDA-1-1Document11 pagesAccident Incident Report Form GARUDA-1-1Rahmat Aiman SobirinNo ratings yet
- Airbus Presentation On LG Integration Into AircraftDocument29 pagesAirbus Presentation On LG Integration Into AircraftRavi Teja PeesapatiNo ratings yet
- Mcdonnell Douglas: Microsoft Flightsimulator 2002Document4 pagesMcdonnell Douglas: Microsoft Flightsimulator 2002José Edwin RoldánNo ratings yet
- Western Hemisphere Wind TunnelsDocument245 pagesWestern Hemisphere Wind TunnelsHimanshu BahugunaNo ratings yet
- Rakesh Sharma Embarked On A Historic Mission On 3rd AprilDocument3 pagesRakesh Sharma Embarked On A Historic Mission On 3rd AprilC J Siva ShankarNo ratings yet
- Fixed Wing Modular UAV Preliminary Structural DesignDocument15 pagesFixed Wing Modular UAV Preliminary Structural DesignHARISH PNo ratings yet
- 2534-WAMP AD 2.1 To AD 2.24 AIRAC AIP AMDT 125 26 JAN 23Document7 pages2534-WAMP AD 2.1 To AD 2.24 AIRAC AIP AMDT 125 26 JAN 23latsar kusumoNo ratings yet
- ALX6 QRH 75 L SI Full Rev1.0Document208 pagesALX6 QRH 75 L SI Full Rev1.0sergiiNo ratings yet
- Airbus ILD Inflight Landining DistancesDocument87 pagesAirbus ILD Inflight Landining DistancesGiorgio PupilloNo ratings yet
- PPL (H) : Part-FCL Question BankDocument10 pagesPPL (H) : Part-FCL Question BankChance 101No ratings yet
- 1 Roles of Aircraft StructuresDocument32 pages1 Roles of Aircraft StructureszaidNo ratings yet
- EASA Newsletter Issue 2Document8 pagesEASA Newsletter Issue 2olivier737No ratings yet
- Primus 1000 EncoreDocument283 pagesPrimus 1000 Encorebrian100% (1)
- Water-Based Paint Formulations, Vol. 3From EverandWater-Based Paint Formulations, Vol. 3Rating: 4.5 out of 5 stars4.5/5 (6)
- Process Steam Systems: A Practical Guide for Operators, Maintainers, and DesignersFrom EverandProcess Steam Systems: A Practical Guide for Operators, Maintainers, and DesignersNo ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Process Plant Equipment: Operation, Control, and ReliabilityFrom EverandProcess Plant Equipment: Operation, Control, and ReliabilityRating: 5 out of 5 stars5/5 (1)
- Sodium Bicarbonate: Nature's Unique First Aid RemedyFrom EverandSodium Bicarbonate: Nature's Unique First Aid RemedyRating: 5 out of 5 stars5/5 (21)
- The Periodic Table of Elements - Post-Transition Metals, Metalloids and Nonmetals | Children's Chemistry BookFrom EverandThe Periodic Table of Elements - Post-Transition Metals, Metalloids and Nonmetals | Children's Chemistry BookNo ratings yet
- The Periodic Table of Elements - Alkali Metals, Alkaline Earth Metals and Transition Metals | Children's Chemistry BookFrom EverandThe Periodic Table of Elements - Alkali Metals, Alkaline Earth Metals and Transition Metals | Children's Chemistry BookNo ratings yet
- Guidelines for Chemical Process Quantitative Risk AnalysisFrom EverandGuidelines for Chemical Process Quantitative Risk AnalysisRating: 5 out of 5 stars5/5 (1)
- Lees' Process Safety Essentials: Hazard Identification, Assessment and ControlFrom EverandLees' Process Safety Essentials: Hazard Identification, Assessment and ControlRating: 4 out of 5 stars4/5 (4)
- Physical and Chemical Equilibrium for Chemical EngineersFrom EverandPhysical and Chemical Equilibrium for Chemical EngineersRating: 5 out of 5 stars5/5 (1)
- Operational Excellence: Journey to Creating Sustainable ValueFrom EverandOperational Excellence: Journey to Creating Sustainable ValueNo ratings yet
- Phase Equilibria in Chemical EngineeringFrom EverandPhase Equilibria in Chemical EngineeringRating: 4 out of 5 stars4/5 (11)
- Pharmaceutical Blending and MixingFrom EverandPharmaceutical Blending and MixingP. J. CullenRating: 5 out of 5 stars5/5 (1)
- Guidelines for Engineering Design for Process SafetyFrom EverandGuidelines for Engineering Design for Process SafetyNo ratings yet
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsFrom EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsNo ratings yet
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationFrom EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationRating: 4 out of 5 stars4/5 (18)
- The HAZOP Leader's Handbook: How to Plan and Conduct Successful HAZOP StudiesFrom EverandThe HAZOP Leader's Handbook: How to Plan and Conduct Successful HAZOP StudiesNo ratings yet
- An Introduction to the Periodic Table of Elements : Chemistry Textbook Grade 8 | Children's Chemistry BooksFrom EverandAn Introduction to the Periodic Table of Elements : Chemistry Textbook Grade 8 | Children's Chemistry BooksRating: 5 out of 5 stars5/5 (1)
- Guidelines for the Management of Change for Process SafetyFrom EverandGuidelines for the Management of Change for Process SafetyNo ratings yet
- Recognizing Catastrophic Incident Warning Signs in the Process IndustriesFrom EverandRecognizing Catastrophic Incident Warning Signs in the Process IndustriesNo ratings yet
- Chemical Process Safety: Learning from Case HistoriesFrom EverandChemical Process Safety: Learning from Case HistoriesRating: 4 out of 5 stars4/5 (14)
- Pharmaceutical Excipients: Properties, Functionality, and Applications in Research and IndustryFrom EverandPharmaceutical Excipients: Properties, Functionality, and Applications in Research and IndustryOtilia M. Y. KooNo ratings yet