You might also like
- Procedure Des Traitement Des Actions Correctives Et PreventivesDocument2 pagesProcedure Des Traitement Des Actions Correctives Et PreventivesAbdelatif Hr100% (1)
- Gestion de Parc Auto: EnjeuxDocument8 pagesGestion de Parc Auto: EnjeuxDavid K. CophieNo ratings yet
- DocimologieDocument103 pagesDocimologieHafsa Grande Corazon100% (1)
- Rapport de Stage - Administration Réseau Et Dévéloppement WebDocument41 pagesRapport de Stage - Administration Réseau Et Dévéloppement Webnajm3dNo ratings yet
- Ecran Star War Force Est Destinée V0.1.Document5 pagesEcran Star War Force Est Destinée V0.1.ElendrakNo ratings yet
- Serie 3Document3 pagesSerie 3amine dhaouiNo ratings yet
- Elaborer Un SdsiDocument60 pagesElaborer Un Sdsizoomtn0% (1)
- ImageRUNNER ADVANCE C3500 Series Service Manual - FR - 1.1Document1,239 pagesImageRUNNER ADVANCE C3500 Series Service Manual - FR - 1.1michael ourdanNo ratings yet
- 1-Introduction Regulation PDFDocument14 pages1-Introduction Regulation PDFMed Ben Ahmed100% (1)
- Hwe 100Document79 pagesHwe 100Yavuz ErcanliNo ratings yet
- Notice 4010Document58 pagesNotice 4010jalouzNo ratings yet
- Soft ProcessorsDocument17 pagesSoft ProcessorsSmirnov ArtaéévNo ratings yet
- HM012F-Banc Pertes de ChargesDocument56 pagesHM012F-Banc Pertes de ChargesAmor GharsalliNo ratings yet
- M50412 Formation Mettre en Oeuvre Microsoft Active Directory Federation Services 2 0 Adfs PDFDocument2 pagesM50412 Formation Mettre en Oeuvre Microsoft Active Directory Federation Services 2 0 Adfs PDFCertyouFormationNo ratings yet
- TD S+ Rie06Document2 pagesTD S+ Rie06FiroDjinsoNanoNo ratings yet
- Transmettre Des Données Avec l'URL: Informations Sur Le TutorielDocument10 pagesTransmettre Des Données Avec l'URL: Informations Sur Le TutorielHicham MoutchouNo ratings yet
- Micro Swimmer RobotDocument8 pagesMicro Swimmer RobotAlvaroEnriqueQuinterosNo ratings yet
- Projet NeuromimetiqueDocument18 pagesProjet NeuromimetiqueKhadidja KssNo ratings yet
- Outillage Sanitaire - Mesure 2000Document66 pagesOutillage Sanitaire - Mesure 2000Camelia SmahanNo ratings yet
- Technique CapitolDocument8 pagesTechnique Capitolformagnifique.franceNo ratings yet
- 2013 TH18334 Fixot Jean PDFDocument190 pages2013 TH18334 Fixot Jean PDFhubNo ratings yet
- 981 Em15042013Document18 pages981 Em15042013elmoudjahid_dzNo ratings yet
- TecnAlarme PDFDocument44 pagesTecnAlarme PDFSemou DioufNo ratings yet
- Devis ChateauDocument1 pageDevis ChateauAlex AdamxNo ratings yet
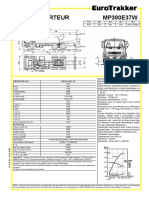
- FT Iveco Eurotrakker MP 380 e 37 W Francais PDFDocument2 pagesFT Iveco Eurotrakker MP 380 e 37 W Francais PDFSaidi JalelNo ratings yet
- Methode - ABC (Mode de Compatibilite) - CopieDocument19 pagesMethode - ABC (Mode de Compatibilite) - CopieSaloua Fennich100% (1)
- TP PcvueDocument2 pagesTP PcvueMohamed ElbanadiNo ratings yet
- Publication 24Document1 pagePublication 24zanazeNo ratings yet
- Les Chaudiere A Vaporisation SimoDocument2 pagesLes Chaudiere A Vaporisation SimoCHOUKRI KamalNo ratings yet
- FI IMB-37261 C V6C4-PETU-8 Place Anatole FranceDocument17 pagesFI IMB-37261 C V6C4-PETU-8 Place Anatole FrancembaitemrarrNo ratings yet