You might also like
- Elementos de Un Sistema MecatrónicoDocument6 pagesElementos de Un Sistema MecatrónicoMaha xuxNo ratings yet
- Definicion Sistema MecatronicoDocument4 pagesDefinicion Sistema MecatronicoCarlos Ruiz100% (3)
- Automatizacion ComponentesDocument41 pagesAutomatizacion ComponentesPedro Martin Llaguento PortillaNo ratings yet
- Invest1ControlDocument7 pagesInvest1ControlRogerforever123No ratings yet
- Sistema mecatrónicoDocument5 pagesSistema mecatrónicoprestige23No ratings yet
- CAM - Unidad 1 - Tema 6 - Conceptos Básicos de ControlDocument11 pagesCAM - Unidad 1 - Tema 6 - Conceptos Básicos de ControlAreas de GradoNo ratings yet
- Control y Automatizacion de Sistemas NeumaticosDocument7 pagesControl y Automatizacion de Sistemas NeumaticosEfrain CastilloNo ratings yet
- Resumen 1Document4 pagesResumen 1MOISES XAVI DIAZ MEZANo ratings yet
- Sistemas de control automático y sus elementos básicosDocument68 pagesSistemas de control automático y sus elementos básicosroberttv374No ratings yet
- MonografiaDocument13 pagesMonografiaJusto Jose Ramos AnahueNo ratings yet
- Controladores de CorrienteDocument11 pagesControladores de CorrienteAreas de GradoNo ratings yet
- CONTROL AUTOMÁTICO - Galvez (Autoguardado)Document5 pagesCONTROL AUTOMÁTICO - Galvez (Autoguardado)Fernando D. GalvezNo ratings yet
- Guia Lab1 OPUDocument8 pagesGuia Lab1 OPUJoan Manuel Quispe BordaNo ratings yet
- Ieco ClaseDocument8 pagesIeco ClaseeduardoNo ratings yet
- Automatización industrial: conceptos básicosDocument28 pagesAutomatización industrial: conceptos básicosmil16No ratings yet
- Capitulo I Control I 2019 IIDocument25 pagesCapitulo I Control I 2019 IIWilinthon Segura Ortega100% (1)
- PLC Cap01 - Ing Victor LazoDocument4 pagesPLC Cap01 - Ing Victor Lazovictor_lazoNo ratings yet
- Práctica 5Document24 pagesPráctica 5Antonio Joksan Palacios IñiguezNo ratings yet
- AP - 5 - Introduccion A Los Sistemas de AutomatizacionDocument6 pagesAP - 5 - Introduccion A Los Sistemas de AutomatizacionAlexander KievfNo ratings yet
- Actuadores Presentacion - 1Document22 pagesActuadores Presentacion - 1ChristinneherreraNo ratings yet
- Tema Estructura de Los Autómatas Programables y de Los Sistemas AutomatizadosDocument14 pagesTema Estructura de Los Autómatas Programables y de Los Sistemas AutomatizadosReynaldo Espino AltamiranoNo ratings yet
- Tipos de Sistemas de ControlDocument5 pagesTipos de Sistemas de ControlJoseline Lucero SerracínNo ratings yet
- Informe Sistemas de Control AutomaticoDocument20 pagesInforme Sistemas de Control AutomaticoSebastian VegaNo ratings yet
- Informe InstrumentacionDocument7 pagesInforme InstrumentacionAndrewRNo ratings yet
- Introducción a los PLC en sistemas industrialesDocument16 pagesIntroducción a los PLC en sistemas industrialesPedro Martin Quiroz TapiaNo ratings yet
- Capitulo I Control I Teoria 2016 IDocument17 pagesCapitulo I Control I Teoria 2016 IYhon Polanco AimitumaNo ratings yet
- (Control Analogico) Evaluacion Unidad IIIDocument16 pages(Control Analogico) Evaluacion Unidad IIIAlfonso García MartínezNo ratings yet
- Instituto Tecnologico de Tapachula: ProfesorDocument17 pagesInstituto Tecnologico de Tapachula: ProfesorAnonymous MO4o57lDzNo ratings yet
- Práctica 6 Control A Tension Reducida de Motor ElectricoDocument23 pagesPráctica 6 Control A Tension Reducida de Motor ElectricoAntonio Joksan Palacios IñiguezNo ratings yet
- Sistema de Control de Riego Por GoteoDocument8 pagesSistema de Control de Riego Por Goteoladyruth26No ratings yet
- SISTEMAS ELECTRONICOS DE CONTROL TecnicaDocument18 pagesSISTEMAS ELECTRONICOS DE CONTROL TecnicaAndres GonzalezNo ratings yet
- Seleccion de Elementos para Automatizacion MecatronicaDocument30 pagesSeleccion de Elementos para Automatizacion MecatronicaDiego LimachiNo ratings yet
- Inversion de Giro de Un MotorDocument14 pagesInversion de Giro de Un MotorAbel Apaza FuentesNo ratings yet
- UNIDAD 1 ControlDocument11 pagesUNIDAD 1 ControlJose Abraham Regalado CabreraNo ratings yet
- T1 - 03 - Automatismos ElectricosDocument11 pagesT1 - 03 - Automatismos ElectricosGabriel LamartheeNo ratings yet
- Control AnalogicoDocument6 pagesControl Analogicofray1308No ratings yet
- Tarea 1.1-2 OPERACIÓN DE SISTEMAS MECATRÓNICOSDocument4 pagesTarea 1.1-2 OPERACIÓN DE SISTEMAS MECATRÓNICOSLizaNo ratings yet
- Tecnología de sensores y actuadores en sistemas de control industrialDocument97 pagesTecnología de sensores y actuadores en sistemas de control industrialLuiis GM100% (1)
- Automatismos y Sistema de Arranque de Maquinas ElectricasDocument7 pagesAutomatismos y Sistema de Arranque de Maquinas ElectricasAndres Kamilo CabraNo ratings yet
- Proyecto Final Control FinalDocument24 pagesProyecto Final Control FinalBrian GonzalezNo ratings yet
- Preguntas sobre sistemas de control y automatizaciónDocument4 pagesPreguntas sobre sistemas de control y automatizaciónAbraham SosaNo ratings yet
- Formas de Reprecentar AutomatismosDocument10 pagesFormas de Reprecentar Automatismossusana_290493No ratings yet
- Simulacion de Los Sistemas de ControlDocument13 pagesSimulacion de Los Sistemas de ControlGesse SteinerNo ratings yet
- Control Modulante de ProcesosDocument28 pagesControl Modulante de ProcesosJuan SuarezNo ratings yet
- Sistemas de Control Automatico Guia 0Document12 pagesSistemas de Control Automatico Guia 0jersonNo ratings yet
- Sistemas y Elementos de ControlDocument5 pagesSistemas y Elementos de ControlManuela ChalasNo ratings yet
- Sistemas de ControlDocument4 pagesSistemas de ControlJAIME BOLIVAR MALO CAMPOVERDENo ratings yet
- Elementos de Un Sistema de Control.Document12 pagesElementos de Un Sistema de Control.Victor ReyesNo ratings yet
- Unidad 4Document8 pagesUnidad 4Maria AcostaNo ratings yet
- Automatización de Sistemas Neumáticos e Hidráulicos Utilizando El PLCDocument5 pagesAutomatización de Sistemas Neumáticos e Hidráulicos Utilizando El PLCLuis MoralesNo ratings yet
- Actividad de Intro MecatronicaDocument5 pagesActividad de Intro MecatronicaLuis Carlos Cervantes AlfaroNo ratings yet
- Aguila Elementos Básicos de Un Sistema de ControlDocument10 pagesAguila Elementos Básicos de Un Sistema de ControlNarciso AguilaNo ratings yet
- InstrumentacionDocument2 pagesInstrumentacionyorkin santana meranNo ratings yet
- Ladder 1Document17 pagesLadder 1danielNo ratings yet
- Filosofía de Control AutonomoDocument14 pagesFilosofía de Control Autonomodherianblue10No ratings yet
- Trabajo de AutomatizacionDocument15 pagesTrabajo de AutomatizacionLuis Guillermo Peña RodríguezNo ratings yet
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311From EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Rating: 2 out of 5 stars2/5 (1)
- Montaje y reparación de sistemas eléctricos y electrónicos de bienes de equipo y máquinas industriales. FMEE0208From EverandMontaje y reparación de sistemas eléctricos y electrónicos de bienes de equipo y máquinas industriales. FMEE0208No ratings yet
- Procesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209From EverandProcesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209No ratings yet
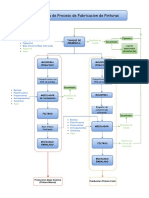
- Diagrama de Proceso - Elaboracion de Pinturas PDFDocument1 pageDiagrama de Proceso - Elaboracion de Pinturas PDFHector GA100% (2)
- Proceso de La PinturaDocument2 pagesProceso de La PinturaHector GANo ratings yet
- Operacion y Proceso Unitario - Elaboracion de Pinturas PDFDocument1 pageOperacion y Proceso Unitario - Elaboracion de Pinturas PDFHector GANo ratings yet
- AMEF Análisis Modal de Fallas YefectosDocument31 pagesAMEF Análisis Modal de Fallas YefectosKJ79100% (50)
- Fallas MecDocument74 pagesFallas MecRes ResNo ratings yet
- Diagrama de Flujo PinturaDocument3 pagesDiagrama de Flujo PinturaHector GANo ratings yet
- Lab 6Document10 pagesLab 6Hector GANo ratings yet
- 25 Sensores CapacitivosDocument7 pages25 Sensores CapacitivosHector GANo ratings yet
- Formato RCMDocument120 pagesFormato RCMHector GA100% (1)
- Actividad 2-A Sem 12Document2 pagesActividad 2-A Sem 12Hector GANo ratings yet
- TP Bombas CentrifugasDocument36 pagesTP Bombas CentrifugasHector GANo ratings yet
- Refrigeración Doméstica (Modo de Compatibilidad)Document31 pagesRefrigeración Doméstica (Modo de Compatibilidad)José0% (2)
- Tema 2 Ciclos de Refrigeracion1Document39 pagesTema 2 Ciclos de Refrigeracion1Jota Mario Llanos50% (2)
- 24 - Sensores - Inductivos Importantes PDFDocument12 pages24 - Sensores - Inductivos Importantes PDFRaul Huayanay CarranzaNo ratings yet
- Ejercicios - Resueltos de CengelDocument11 pagesEjercicios - Resueltos de CengelGonzález NickovNo ratings yet
- La Metodologa PROACTHojasde CursoDocument3 pagesLa Metodologa PROACTHojasde CursoHector GANo ratings yet
- ApuntesgeneralesDocument94 pagesApuntesgeneralesKas AvilaNo ratings yet
- Ética profesional en el ejercicio de las profesionesDocument15 pagesÉtica profesional en el ejercicio de las profesionesHector GANo ratings yet
- Los 6 Pasos PROACT - SpanishDocument1 pageLos 6 Pasos PROACT - SpanishArturo Pucutay100% (1)
- Ejercicios Resueltos de TermodinamicaDocument14 pagesEjercicios Resueltos de Termodinamicaquimicocad989167% (3)
- Ética Profesional (Unidad V)Document35 pagesÉtica Profesional (Unidad V)Hector GANo ratings yet
- Tema 2 Ciclos de Refrigeracion1Document39 pagesTema 2 Ciclos de Refrigeracion1Jota Mario Llanos50% (2)
- Anlisisdecausaraztutora2013 130803215541 Phpapp02Document113 pagesAnlisisdecausaraztutora2013 130803215541 Phpapp02Hector GANo ratings yet
- Analisis de Causa Raìz PDFDocument16 pagesAnalisis de Causa Raìz PDFmsantanderNo ratings yet
- ACR Análisis Causa RaízDocument31 pagesACR Análisis Causa RaízKarol Jesus Lucero Venegas100% (1)
- Ejemplo Automatización MezclaDocument26 pagesEjemplo Automatización MezclakarlitoxrNo ratings yet
- La Metodologa PROACTHojasde CursoDocument3 pagesLa Metodologa PROACTHojasde CursoHector GANo ratings yet
- Ejemplo Automatización MezclaDocument26 pagesEjemplo Automatización MezclakarlitoxrNo ratings yet
- Ejemplo Automatización MezclaDocument26 pagesEjemplo Automatización MezclakarlitoxrNo ratings yet
- Ejemplo Automatización MezclaDocument26 pagesEjemplo Automatización MezclakarlitoxrNo ratings yet
- Método de TaguichiDocument19 pagesMétodo de TaguichiDoris Gina Romero Vera100% (1)
- COVENIN 1753-06 Proy - Constr. Obra en Concreto Est.Document14 pagesCOVENIN 1753-06 Proy - Constr. Obra en Concreto Est.Miguel SambranoNo ratings yet
- Tuo 2 Anexo 8 B Lambayeque 05 02 2015 PublicadoDocument202 pagesTuo 2 Anexo 8 B Lambayeque 05 02 2015 PublicadoRonald Harry Reinosa SandovalNo ratings yet
- Modelo McCallDocument41 pagesModelo McCallAbraham Quispe Herrera100% (1)
- Mto SHX002 570 05 1001 - 0Document6 pagesMto SHX002 570 05 1001 - 0Pablo García PeñaNo ratings yet
- A1 PDFDocument9 pagesA1 PDFOscar Gabriel Moscol JibajaNo ratings yet
- Manual de EnsamblajeDocument114 pagesManual de EnsamblajeRodrigo Carita100% (1)
- Taller Correccion de Factor de PotenciaDocument3 pagesTaller Correccion de Factor de PotenciaGina Paola GuerreroNo ratings yet
- Bases RobóticaDocument26 pagesBases RobóticaStefano Popescu0% (1)
- Estructuras PretensadasDocument6 pagesEstructuras PretensadasYHORCH100% (1)
- Estadistica Encuesta11Document35 pagesEstadistica Encuesta11Iván Zelaya HuertaNo ratings yet
- ATH - PRUEBA DE NIVEL DE LOGRO Nivel 4ADocument6 pagesATH - PRUEBA DE NIVEL DE LOGRO Nivel 4AALENo ratings yet
- Clase 1-2020-I Upla PDFDocument45 pagesClase 1-2020-I Upla PDFLixy HENo ratings yet
- Viáticos y viajes de funcionarios públicos de acuerdo al Art. 7 LOTAIPDocument15 pagesViáticos y viajes de funcionarios públicos de acuerdo al Art. 7 LOTAIPVenzon SotNo ratings yet
- Relación Entre La Ingenieria y La CienciaDocument1 pageRelación Entre La Ingenieria y La CienciaGilmar Sanchez MoranNo ratings yet
- Reconocimiento de Sistemas de Control y AutomatizaciónDocument23 pagesReconocimiento de Sistemas de Control y AutomatizaciónPedrito SotoNo ratings yet
- Ingeniero Agrícola INACAPDocument2 pagesIngeniero Agrícola INACAPmonteverde-3No ratings yet
- UST Geologia 2021Document2 pagesUST Geologia 2021Lore Hurt.No ratings yet
- Carreras de Grado 2021 Setiembre Def OK2Document56 pagesCarreras de Grado 2021 Setiembre Def OK2diego sanchezNo ratings yet
- Practica Calificada de Caminos II (2021-I - c1)Document2 pagesPractica Calificada de Caminos II (2021-I - c1)Estefano JmNo ratings yet
- Brochure Coselsa 2011Document13 pagesBrochure Coselsa 2011Javier MatiasNo ratings yet
- Guía 3Document5 pagesGuía 3Bryan Macas CorderoNo ratings yet
- 3.4. Proyecto Pavimentacion Lam - 01Document1 page3.4. Proyecto Pavimentacion Lam - 01noemiNo ratings yet
- Automatización de procesos: Planificación y ejecución de proyectosDocument10 pagesAutomatización de procesos: Planificación y ejecución de proyectosJavier Fernando Ventura ZuñigaNo ratings yet
- ProyectoDocument44 pagesProyectoRobert Ben HdzNo ratings yet
- Diseño de alcantarilla de 5.0x5.0 m con relleno de 1.64 mDocument8 pagesDiseño de alcantarilla de 5.0x5.0 m con relleno de 1.64 mHECTOR CARLINNo ratings yet
- Origen Epistemologico en La Ingenieria CivilDocument9 pagesOrigen Epistemologico en La Ingenieria CivilLina María TorresNo ratings yet
- Evidencia 7 Taller Talking About Logistics, WorkshopDocument10 pagesEvidencia 7 Taller Talking About Logistics, WorkshopdevisNo ratings yet
- Supervisor SSOMA obra PDRDocument2 pagesSupervisor SSOMA obra PDRGiancarlos Sayas YactayoNo ratings yet
- Metodologías AgilesDocument46 pagesMetodologías Agilescharles botijaNo ratings yet