You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Worksheet5 Obstacledetection2013Document3 pagesWorksheet5 Obstacledetection2013api-233732442No ratings yet
- Worksheet3 Claponclapoff2013Document3 pagesWorksheet3 Claponclapoff2013api-233732442No ratings yet
- Worksheet2 Rightface2013Document3 pagesWorksheet2 Rightface2013api-233732442No ratings yet
- Worksheet1 Fullspeedahead2013Document4 pagesWorksheet1 Fullspeedahead2013api-233732442No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Present Yourself SB L2-1Document14 pagesPresent Yourself SB L2-1Hanan HabashiNo ratings yet
- 9709 w15 Ms 42Document7 pages9709 w15 Ms 42yuke kristinaNo ratings yet
- Rubics CubeDocument2 pagesRubics CubeAlwin VinuNo ratings yet
- Forward Planning A Practical Guide For MuseumsDocument36 pagesForward Planning A Practical Guide For MuseumsElena FragkakiNo ratings yet
- Vedantu Brochure 11-12Document22 pagesVedantu Brochure 11-12ankitmohanty01No ratings yet
- Start Up Guide - How To Become A Truck Dispatcher eDocument12 pagesStart Up Guide - How To Become A Truck Dispatcher eDragan LovricNo ratings yet
- Andragoske Studije 2010-2gfjjkDocument229 pagesAndragoske Studije 2010-2gfjjkSheldon CooperNo ratings yet
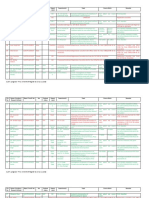
- Search Committee Formed to Recommend New VC of Anna UniversityDocument3 pagesSearch Committee Formed to Recommend New VC of Anna Universityjebi.lee449No ratings yet
- Brief Curriculum Vitae: Specialisation: (P Ea 1. 2. 3. Statistical AnalysisDocument67 pagesBrief Curriculum Vitae: Specialisation: (P Ea 1. 2. 3. Statistical Analysisanon_136103548No ratings yet
- Homework Week 24Document3 pagesHomework Week 24api-294654186No ratings yet
- Curriculum Vitae Firhan.V Eng Version Update PDFDocument2 pagesCurriculum Vitae Firhan.V Eng Version Update PDFFirhan VnNo ratings yet
- Ph.D. Enrolment Register As On 22.11.2016Document35 pagesPh.D. Enrolment Register As On 22.11.2016ragvshahNo ratings yet
- Koya University Faculty of Education: English DepartmentDocument7 pagesKoya University Faculty of Education: English Departmentnazaninmustafa647No ratings yet
- Cultural Humility Framework for Anti-Oppressive ArchivesDocument23 pagesCultural Humility Framework for Anti-Oppressive ArchivesVikram KalekaNo ratings yet
- Patna College - WikipediaDocument10 pagesPatna College - WikipediaAmitesh Tejaswi (B.A. LLB 16)No ratings yet
- Assess 2Document2 pagesAssess 2kiran uprety0% (1)
- Drama Games For Acting ClassesDocument12 pagesDrama Games For Acting ClassesAnirban Banik75% (4)
- SureshCV FMCGDocument2 pagesSureshCV FMCGSuresh SNo ratings yet
- The Sikh Sansar USA-Canada Vol. 1 No. 2 June 1972 (Bhai Vir Singh Issue)Document36 pagesThe Sikh Sansar USA-Canada Vol. 1 No. 2 June 1972 (Bhai Vir Singh Issue)SikhDigitalLibraryNo ratings yet
- MGT-303 EntrepreneurshipDocument10 pagesMGT-303 EntrepreneurshipAli Akbar MalikNo ratings yet
- Edwards Groves 2014Document12 pagesEdwards Groves 2014Camila LaraNo ratings yet
- Leadership and Teamwork DefinedDocument22 pagesLeadership and Teamwork DefinedAyu AzlinaNo ratings yet
- CIB - PEC Healthy - EN-1Document16 pagesCIB - PEC Healthy - EN-1Lisa GonçalvesNo ratings yet
- LP 5Document2 pagesLP 5api-273585331No ratings yet
- Chapter 4 OrganizingDocument17 pagesChapter 4 OrganizingKenjie GarqueNo ratings yet
- Music 8 SLM Q1 Module - 2Document23 pagesMusic 8 SLM Q1 Module - 2Glydel Mae Villamora - SaragenaNo ratings yet
- Systems Archetypes II TRSA02EDocument31 pagesSystems Archetypes II TRSA02EMariani Sinaga100% (1)
- Recomandare DaviDocument2 pagesRecomandare DaviTeodora TatuNo ratings yet
- Agriculture Paper1Document16 pagesAgriculture Paper1sjgchiNo ratings yet
- Led TV in The Classroom Its Acceptability and Effectiveness in The PhilippinesDocument24 pagesLed TV in The Classroom Its Acceptability and Effectiveness in The PhilippinesGlobal Research and Development Services100% (3)