Professional Documents
Culture Documents
Autopropulsarea Autovehiculelor Pe Roti
Uploaded by
Nicolas DanutCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Autopropulsarea Autovehiculelor Pe Roti
Uploaded by
Nicolas DanutCopyright:
Available Formats
1
RETROSPECTIV ASUPRA PROCESULUI DE RULARE
A ROII DE AUTOMOBIL
1.1.Ecuaiile de micare a roii
Pentru a descrie micrile la o roat se scriu ecuaiile de micare pentru
sistemul plan prezentat n figura 1.1.
Roata cu centrul de greutate c
gR
prin
care trece axa de rotaie, se deplaseaz n
direcia x i se rotete cu unghiul . Prin
secionarea modelului (fig.1.1.a) devin
vizibile (fig.1.1.b) forele i momentele
reactive, respectiv F, G
R
i M
R
i forele ce
se nasc in suprafaa de contact dintre pneu
i calea de rulare, adic reaciunea normal
Z.
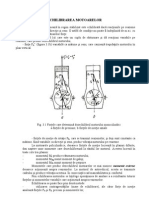
Deoarece pe suprafaa de contact
dintre pneu i calea de rulare exist o
distribuie neuniform a presiunii (fig.1.2.)
este necesar s se introduc nc un
moment a z M
r
= , atunci cnd
reaciunea vertical Z, acioneaz la
distana a de axa de simetrie a roii. Cu
masa ce revine unei roi m
R
i cu
momentul la roat M rezult urmatoarele
ecuaii de micare:
F X
t
x
m
R
=
2
2
d
d
(1.1)
R R
G Z
t
z
m =
2
2
d
d
(1.2)
r d R R
M r X M
t
J =
2
2
d
d
(1.3)
z
x
r
v
d
x
v
z
F
G
M
R
R
M
G
F
R
R
c
gR
gR
c
Z
X
M
r
X
Z
M
r
a)
b)
Fig.1.1. Sistemul autovehicul - cale
de rulare
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 4
Fig.1.2. Distribuia presiunii n suprafa de contact
dintre pneu i calea de rulare
Dac roata ruleaz cu vitez constant, derivatele ecuaiilor de micare de
translaie i de rotaie sunt nule:
0
d
d
2
2
=
t
x
0
d
d
2
2
=
t
iar ecuaiile (1.1) i (1.3) devin:
F X = (1.4)
r d R
M r X M + = (1.5)
Dac momentul la roat M
R
=0 i se consider ca nu apare nici un alt moment
(frnare, frecare), atunci apare totui o for F care s nving rezistena la roat
(rulare), exprimat de relaia (1.4) prin fora de reaciune X. Aceast rezisten se
numete rezisten la rulare i este notat cu R
r
:
r
R X = (1.6)
Rezistena la rulare este proporional cu sarcina pe roat G
r
:
R r
G f R = (1.7)
n care f este factorul de proporionalitate adimensional i se numete coeficientul
rezistenei la rulare.
Dac se ine seama de fig.1.2 ( a z M
r
= ) i de ecuaia (1.5) n care se
introduce M
R
=0, se obine:
R
d
r
G
r
a
R = (1.8)
din care se deduce c:
d
r
a
f = (1.9)
n figura 1.2 s-a presupus c drumul este nedeformabil, dac ns, roata se
afund, calea de rulare se deformeaz i apar fore care frneaz automobilul
(fig.1.3). De aceea rezistena la rulare pe calea deformabil este mult mai mare. La
rularea pe o osea umed, rezistena la rulare se mrete n comparaie cu cea
Z
a
r
M
Retrospectiv asupra procesului de rulare a roii de automobil 5
nregistrat pe o osea uscat, din cauza faptului c roata trebuie s strapung
stratul de ap. Rezistena de strpungere este dependent de viteza de deplasare, de
limea pneului i de nlimea stratului de ap h.
Fig.1.3. Rularea pe cale de rulare deformabil
Rezistena la rulare este sporit i de frecarea din lagre, care provoac apariia
unui moment M
rl,
care se opune sensului rulrii (fig.1.4).
Fig.1.4. Determinarea rezistenei la rulare cnd
se ine cont de frecarea din lagrul roii
Acest moment este proporional cu ncrcarea lagrului
R R
G F G +
2 2
i
se exprim cu ajutorul coeficientului de frecare din lagr
l
i raza lagrului r
l:
2 2
F G r M
R l l rl
+ = (1.10)
Dac se ine seama de relaia (1.5), cu M
R
=0, momentul M
rl
este:
r d rl
M r X M + = (1.11)
sau cu ajutorul relaiilor (1.6), (1.7) si (1.8):
Z
R
r
F=X
R
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 6
( )
2 2
F G
r
r
G f X
R
d
l
l R
+ + = (1.12)
Rezistena dat de frecarea din lagre este mult mai mic i deseori neglijabil
n cazul lagarelor cu rulmeni i mai mare n cazul lagrelor cu alunecare. n figura
1.5 este prezentat dependena coeficientului de frecare
l
de viteza de deplasare a
automobilului pentru lagre de alunecare i lagre de rostogolire.
Fig.1.5. Variaia coeficeintului de frecare din lagrul roii
n funcie de viteza de deplasare a automobilului
Din figur rezult c de la o anumit mrire a vitezei de deplasare, frecarea n
lagre rmne constant. La pornire, diferena dintre cele dou tipuri de lagre este
mult mai mare dect la vitezele mari de deplasare. Dac asupra roii acioneaz un
moment exterior (de antrenare sau de frnare), n baza relaiei (1.3) reaciunea
tangenial (fig.1.1) se obine cu expresia:
d
r
d
R
r
M
r
M
X = (1.13)
Dac momentul de antrenare M
R
este mai mare dect M
r,
atunci reaciunea
tangenial X este orientat n sensul de mers (fig.1.1.b mijloc). n cazul unui
moment de frnare, deci un moment negativ, reaciunea X este orientat n sensul
opus direciei de deplasare.
Relaia (1.13) ne arat c n cazul existenei momentului M
R
trebuie s apar -
ntre pneu i calea de rulare o for, n afara situaiei cnd M
R
=M
r
i deci X=0.
Aceast for nu poate fi orict de mare, fiind limitat de aderen. n aceast
0 20 40 60 80 100 120
0,002
0,004
0,006
0,008
0,010
0,012
0,014
0,016
lagar de alunecare
lagar de rostogolire
repaus = 0,013
l
l
v [km/h]
[
-
]
Retrospectiv asupra procesului de rulare a roii de automobil 7
situaie se limiteaz i fora F care antreneaz sau frneaz automobilul, deoarece
conform ecuaiei (1.4) este valabil relaia:
F X = (1.14)
Dac n locul raportului
d
r
r
M
, se introduce relaia (1.13) R
r
(
d
r
r
M
=R
r
) i
considerm ca aceasta este constant, atunci:
r
d
R
R
r
M
F X = = (1.15)
n figura 1.6 sunt prezentate separate forele i momentele de propulsie i
frnare, precum i cazul cnd M
R
=0.
n expresia (1.15) se vede c momentul la roat M
R
trebuie s nving mai nti
rezistena la rulare i apoi ce rmne s echilibreze celelalte rezistene la naintare.
n cazul frnrii, rezistena la rulare ajut momentul de frnare.
Fig.1.6. Forele si momentele de propulsie i frnare
a)Antrenare cu M
R
>0 (
d r R
r R M > );
b)Rulare cu M
R
=0;
c)Frnare cu M
R
<0(
d r R
r R M < )
1.2. Aderena i alunecarea
Dup cum s-a mai amintit, fora tangenial maxim X
max
(transmisibil la
roat) este limitat i este dat de relaia:
Z X =
max
(1.16)
n care este coeficientul de aderen.
a)
X
M
R
X
F
R
M
v
F
b)
X=R
F
r
v
F
c)
X=F
F
R
M =M
v
F
X=R
r
F
R F
M =M
f
X=F
f
r
d
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 8
Dac aceast for maxim permis de drum X
max
este depait sau altfel spus,
dac se aplic un moment prea mare la roat, atunci apare alunecarea ntre roat i
suprafaa drumului.
n aceast situaie, se transmite o for avnd mrimea X
a,
care este ns mai
mic dect X
max
i anume:
Z X
a
= (1.17)
n care
a
este coeficientul de frecare la alunecare, fiind valabil n general relaia:
>
a
(1.18)
De aici se poate trage concluzia c, pentru a transmite fore de antrenare i de
frnare ct mai mari, este necesar s se dozeze n aa fel momentele de antrenare i
de frnare nct s nu apar alunecarea, asigurndu-se astfel aderena
corespunzatoare. n timpul fenomenului de alunecare ntre pneu i calea de rulare
(fig.1.7) se deosebesc dou cazuri distincte i anume:
- dac roata antrenat (motoare) patineaz, atunci viteza unghiular
dt
d
a roii este sensibil mai mare dect cea corespunzatoare vitezei
de deplasare
dt
dx
i avem cazul de patinare ;
- dac roata este frnat, ea nu se rotete 0 =
dt
d
i alunec pe calea de
rulare ca o sanie avem cazul de alunecare total, roata fiind blocat.
Fig.1.7. Cazurile de patinare (a) i alunecare (b)
Alunecarea la antrenare se determin cu relaia:
d
r
t
r
r
a =1 (1.19)
iar alunecarea la frnare:
Retrospectiv asupra procesului de rulare a roii de automobil 9
r
d
f
r
r
a =1 (1.20)
n care r
d
este raza dinamic a roii i r
r
este raza de rulare.
Reaciunea tangenial X, raportat la reaciunea normal Z, reprezint o
expresie adimensional :
Y
X
= (1.21)
care se numete fora tangenial specific.
n figura 1.8 se prezint variaia forei tangeniale specifice () n funcie de alunecare
(a), a crei desfurare n timp este aproximativ identic pentru antrenare i frnare la
valoarea maxim.Valoarea maxim a forei tangeniale specifice este egal cu coeficientul
de aderen . Dac alunecarea crete n continuare fora tangeniala specific scade i
atinge pentru alunecarea de 100% (a=1) valoarea coeficientului de frecare la alunecare
a.
Curba de la la
a
este desenat cu linie ntrerupt, ntruct n acest domeniu nu
sunt posibile fenomene staionare. De exemplu o roat care ruleaz poate fi bocat
prin frnare excesiv, n cateva fraciuni de secund, depaindu-se chiar domeniul
pan la .
Fig.1.8. Variaia forei tangeniale speficifice () n funcie de alunecare (a)
Fora tangenial specific este influenata de starea drumului, caracteristicile
constructive ale pneului, viteza de deplasare, etc.
n bibliografia menionat [1] s-a demonstrat funcia de dependen dintre
fora tangenial specific de alunecare n perioada de deformare elastic a pneului,
respectiv:
a
Z
AE
= (1.22)
n care A este aria seciunii transversale a pneului, E-modulul de elasticitate
longitudinal, Z-reaciunea normal. Reprezentarea grafic a dependenei (1.22) este
a
a
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 10
artat n figura 1.9 cu linie ntrerupt. Cu linie continu este prezentat variaia
forei tangeniale specifice n funcie de alunecare aa cum s-a vzut n figura 1.8
Se observ c numai la valori mici ale alunecrii exist o coresponden ntre
cele dou dependene. Deoarece relaia (1.22) a fost dedus n ipoteza c n
suprafaa de contact nu apare alunecare, ci numai deformaie, nseamn c la
alunecri mici predomin deformaiile elementelor pneului.
La valori mai mari ale alunecrii, atunci cnd fora tangenial specific crete,
apar alunecri pariale n suprafaa de contact. Evidenierea proceselor care au loc
n suprafaa dintre pneu i cale se poate face prin divizarea curbei caracterisiticii de
rulare n trei domenii:
- domeniul I, n care se produce deformarea tangenial a pneului datorit
elasticitii materialului. Este de fapt o alunecare de deformare sau
alunecare elastic numit i pseudoalunecare ;
- domeniul II, n care apare alunecarea parial, ceea ce nseamn c
elemente ale benzii de rulare ncep sa alunece pe suprafaa de contact ;
- domeniul III, n care numarul elementelor care alunec crete pn la a=1,
i cnd se produce alunecarea total, adic toate elementele benzii de
rulare din suprafaa de contact alunec. Valoarea maxim a forei
tangeniale specifice
max
i deci i a coeficientului de aderen se gsete
la limita dintre domeniile II si III, adic n zona unde destul de multe
elemente ale benzii de rulare au nceput s alunece.
Fig.1.9. Funcia de dependent =f(a)
a
I
III
II
Retrospectiv asupra procesului de rulare a roii de automobil 11
1.3.Distribuia eforturilor pe suprafaa de contact dintre pneu i cale
Pentru a se clarifica apariia alunecrii pariale, deci domeniul II (fig 1.9),
trebuie s se cunoasc distribuia reaciunii tangeniale X pe suprafaa de contact.
Fig 1.10 arat un pneu, ncrcat doar cu sarcin normal G
R.
Fig.1.10. Distribuia sarcinii G
R
pe suprafaa de contact
Din cauza ncrcrii verticale, pneul se deformeaz, arcurile elementare se
comprim i n afar de cele care sunt situate pe axa de simetrie, sunt orientate
nainte sau napoi. De exemplu arcurile elementare aflate ntre jant i banda de
rulare AA ajung n poziia AA; pentru aceasta este necesar o for care
reacioneaz de la calea de rulare. Raportnd aceast for la elementul
corespunztor de suprafa, rezult efortul unitar de deformare p
x
. n mijlocul
suprafeei de contact efortul unitar p
x
este nul; n partea din fa este orientat n
direcia de mers iar n partea din spate n sensul opus direciei de mers (fig. 1.11).
Fig.1.11. Orientarea efortului unitar de deformare p
x
A' B'
A''
A
B
p
x
l
p
x
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 12
La nceputul i sfaritul suprafeei de contact se observ o schimbare de sens,
din cauz c n aceast zon elementul
de pneu este mai ntins. Suma
eforturilor unitare de deformare trebuie
s fie nul, pentru c fora periferic
tangeniala X este nul. Dac se
consider i rezistena la rulare - pneul
ruleaz atunci reaciunea tangenial
r
R X = este negativ. n acest caz
eforturile unitare p
x
opuse direciei de
mers sunt predominante, iar locul unde
p
x
=0, nu mai este la mijloc ci n partea
din spate a suprafeei de contact.
Daca apare un moment de
exemplu de frnare atunci conform
figurii 1.12.a eforturile tangeniale p
x
devin i mai mari, evident pn la
limita de aderent. Se va face distincie
ntre coeficientul de aderen i
coeficientul de frecare la alunecare
a.
n figura 1.12 b este artat variaia
eforturilor normale p
z,
iar n figura
1.12.c valorile limitate de aderena p
z
i de frnarea de alunecare
a
p
z.
Dac
eforturile tangeniale sunt mai mici
dect valorile limit, atunci elementele
benzii de rulare, ader la calea de rulare
(fig.1.12.d) i se obine relaia:
z x
p p = (1.23)
Dac momentul de frnare se
mrete, cresc i eforturile tangeniale
px i atunci la un anumit punct din
suprafaa de contact (punctul 1 din
fig.1.12.d) se atinge valoarea limit i
toate punctele din suprafaa de contact
care se afl n spatele punctului 1 ncep
s alunece, iar efortul tangenial se
obine cu relaia:
z a a
p x p = (1.24)
Dac momentul de frnare se mrete
n continuare, atunci limita dintre aderent i alunecare se deplaseaz inainte,
0
1
2
3
4
p
x
l
MF
M =0 F
1
0
2
3
p
4
Z
1
0
2
3
p
4
x
1
0
2
3
p
4
x
A1
A
[daN/cm]
[daN/cm]
[daN/cm]
[daN/cm]
a)
b)
c)
d)
1
directia de mers
p
a z
p
z
Fig.1.12. Variaia eforturilor
tangeniale
Retrospectiv asupra procesului de rulare a roii de automobil 13
suprafaa corespunzatoare efortului tangenial p
x
se mrete i reaciunea
tangenial:
=
1
0
d
A
x
A p X (1.25)
Dac se noteaz partea din suprafaa de contact n care predomin starea de
aderen cu A
1
, atunci relaiile (1.23), (1.24) si (1.25) se pot combina n expresia:
dA A p X
z
A
A
a
A
z
+ =
p d
1
1
0
max
(1.26)
Pentru o anumit mrime a suprafeei A
1,
suprafaa situat sub curba p
x,
devine
maxim, iar reaciunea tangenial maxim (fig.1.13) X
max
este:
A p A p X
z
A
A
a
A
z
d d
1
1
0
+ =
=z (1.27)
Din relaia (1.27) se vede c aa numitul coeficient de aderen, care se
raporteaz la ntreaga suprafa de
contact se compune din dou pri,
una n care elementele benzii de
rulare ader la suprafaa de contact i
alta n care elementele lungi de rulare
alunec.Cu aceste precizri, se
consider ca s-a nteles noiunea de
alunecare parial precum i procesul
din zonele II i III ale curbei din
figura 1.9.
La alunecarea total (a=1), toate
elementele benzii de rulare din
suprafaa de contact alunec i este
valabil relaia:
z A p X
z
A
a a
= =
d
0
(1.28)
Reaciunea normal Z se
determin conform figurii 1.12 b) cu
expresia:
A p Z
A
z
d
0
=
(1.29)
Asemanator se procedeaz i pentru roata motoare, asupra creia acioneaz
momentul de antrenare (fig.1.14). n acest caz cele mai mari eforturi tangeniale se
4
1
0
2
3
a)
[daN/cm]
p
x
0
1
3
2
4
b)
[daN/cm]
p
x
X
a
max
X
1'
A'1
A
l
p
z
a z
p
Fig. 1.13. Limitele de variaie a eforturilor
tangeniale
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 14
nregistreaz n partea din spate a suprafeei de contact, aa c alunecarea apare mai
nainte. Eforturile tangeniale sunt orientate n acelai sens cu direcia de micare,
adic contrar ca la roata frnat.
Fig.1.14. Variaia eforturilor tangeniale la roile motoare
1.4. Rularea cu vitez variabil
Revenind la paragraful 1.1 respectiv la ecuaiile de micare se va analiza
accelerarea sau decelerarea
2
2
d
d
t
x
respectiv
2
2
d
d
t
conform ecuaiilor (1.1),(1.2) si
(1.3) respectiv:
F X
t
x
m
R
=
2
2
d
d
;
r d R R
M r X M
t
I =
2
2
d
d
Dac se elimin reaciunea tangenial X, rezult urmtoarea relaie ntre
momentul motor M
R
i fora F ce acioneaz asupra punii automobilului:
1
0
2
3
M =0 R
R M
a)
[daN/cm]
p
4
x
4
3
2
1
p
x
2
4
p
x
3
1
0
[daN/cm]
b)
directia de mers
p
a z
z
p
Retrospectiv asupra procesului de rulare a roii de automobil 15
d
R R r
d
R
r t
I
t
x
m R
r
M
F
1
d
d
d
d
2
2
2
2
=
(1.30)
n figura 1.15 se prezint o evaluare a relaiei (1.30) pentru cele dou cazuri
importante: roata antrenat cu vitez variabil (fig.1.15.a) i roata frnat
decelerat. Sarcinile verticale au fost omise din aceast reprezentare pentru a se
asigura o claritate mai mare. Mrimile M
R,
M
F,
F, X,
2
2
d
d
t
x
i se vor introduce cu
valori absolute.
Fig.1.15.Forele i momentele care acioneaz asupra roii
a) 0
d
d
;
2
2
> >
t
x
R r M
r d R
; b) 0
d
d
;
2
2
< <
t
x
R r M
r d R
Acceleraia unghiular
2
2
d
d
t
poate fi transformat n acceleraie de translaie
cu relaia:
t
r
t
x
d
d
d
d
= (1.31)
conform acesteia:
2
2
2
2
d
d 1
d
d
d
d
d
d
t
r
r t
x
t
r
t
x
+ =
sau
M
a)
X
b)
X
X
M
R
F
M
F
F
F
M
R
F
v
F
v
X
2
2
dt
d x
dt
d x
2
2
dt
d
2
2
dt
d
R
I
2
2
dt
d x
m
R
2
2
dt
d x
m
R
2
2
dt
d x
dt
d x
2
2
dt
d
2
2
dt
d
R
I
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 16
r t
x
t
r
t
x
r t
1
d
d
d
d
d
d 1
d
d
2
2
2
2
(1.32)
Dup introducerea acceleraiei unghiulare din relaia (1.32) n relaia (1.30) se
va obine:
t
x
t
r
r r
I
t
x
r r
I
m R
r
M
F
d
R
d
R
R r
d
R
d
d
d
d
d
d
2 2
2
+ = (1.33)
Aceasta relatie continand multe variabile, dependente ntre ele (
2
2
d
d
t
cu
viteza
2
2
d
d
t
x
), iar r fiind o mrime (raza de rulare) care depinde de alunecarea
dintre pneu i calea de rulare, care la rndul ei depinde de reaciunea tangenial X
este greoaie. Din aceast cauz, trebuie simplificat, respectiv se neglijeaza
influena alunecrii i ca atare
0
d
d
=
t
r
rezult a=constant. n aceste condiii relaia (1.33) devine:
2
2
d
d
t
x
r r
I
m R
r
M
F
d
R
r r
d
R
+ = (1.34)
Dac se ine seama totui de alunecare, atunci conform relaiei (1.19) i pentru
cazul antrenrii relaia (1.34) devine:
( )
2
2
d
d
1 t
x
a r
I
m R
r
M
F
d
R
r r
d
R
+ = (1.35)
n cazul n care roata este franat
( )
2
2
d
d 1
t
x
r
a I
m R
r
M
F
d
R
r r
d
R
+ = (1.36)
Din relaiile (1.35) i (1.36) rezult c att momentul de antrenare ct i cel de
frnare trebuie mai nti s accelereze sau s decelereze masa de translaia m
R
i
cea de rotaia I
R
/r
2.
Diferena const n faptul c la antrenare momentul de inerie se
mrete cu creterea alunecrii (roata se rotete mai repede dect ar fi necesar
pentru realizarea unei anumite distane de drum), iar la frnare momentul de inerie
se va micora i ca urmare va exista un moment disponibil mai mare pentru
frnarea automobilului.
2
NCRCAREA ROII CU SARCINI VERTICALE I
CAPACITATEA PORTANT A ROII
2.1. Incarcarea rotii
Din ecuaia de echilibru (1.2) i conform figurii 1.1 rezult reaciunea normal
a solului asupra roii:
2
2
d
d
t
z
m G Z
R R
+ = (2.1)
unde
R
G reprezint sarcina ce revine unei roi din partea caroseriei, inclusiv
greutatea proprie a roii. Daca notm greutatea ce revine unei roi din partea
caroseriei cu
c
G i greutatea proprie a unei roi cu
r
G atunci
R
G
r c
G G + = (2.2)
Forta
c
G se compune din doua pri, dintr-o component static
cst
G care
rezult din greutatea caroseriei ce revine roii i dintr-o component dinamica
cdin
G , care rezulta din acceleraia caroseriei pe vertical (fora de inerie a
caroseriei). Pentru c greutatea roii
r
G aparine sarcinii statice i fora de inerie
|
|
.
|
\
|
2
2
d
d
t
z
m
R
a roii, celei dinamice, reaciunea normal Z este format din:
( )
|
|
.
|
\
|
+ + + =
2
2
d
d
t
z
m G G G Z
R cdin r cst
(2.3)
cu componenta static:
r cst stat
G G Z + =
si componenta dinamica:
2
2
d
d
t
z
m G Z
R cdin din
+ =
deci:
din st
Z Z Z + = (2.4)
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 18
Fig.2.1. Variaia reaciunii normale
n figura 2.1. este prezentat variaia reaciunii normale Z n funcie de timpul
( ) t i de drumul parcurs ( ) x . Componenta dinamic poate fi pozitiv sau n cazul
extrem:
stat din
Z Z = , respectiv reaciunea instantanee 0 = Z . n aceast situaie,
ntre roat i calea de rulare nu poate fi transmis nici o for tangenial
longitudinal sau transversal. Daca acest fenomen ar aprea n acelai timp la
toate roile unui automobil, atunci posibilitatea de autopropulsare ar fi exclus.
Pentru a se pune n eviden influena sarcinii oscilante, aceasta se raporteaz
uneori la sarcina static:
st
din
st
Z
Z
Z
Z
+ =1 (2.5)
Acum putem folosi ca parametru pentru sigurana mersului raportul
st
Z Z /
respectiv
st din
Z Z / ntruct acest raport caracterizeaz pierderea de fore orizontale
transmisibile, cnd
din
Z este pozitiv.
Deasemenea raportul
st
Z Z / (
st din
Z Z / ) poate fi folosit i ca parametru pentru
limita de aderen deoarece el indic ct de mare este sarcina pe calea de rulare
comparativ cu ncrcarea static i cu ncrcarea dinamic a roii cnd
din
Z este
pozitiv.
nclinarea drumului longitudinal sau transversal modific ncarcarea
static
st
Z i prin aciunea accelerrii sau decelerrii , a acceleraiei centripete i
verticale din cauza denivelrilor i componenta dinamic
din
Z
ncrcarea roii cu sarcini verticale i capacitatea portant a roii 19
2.2. Capacitatea portant a roii limitat de temperatur
n acest paragraf se va trata interaciunea elementelor componente ale pneului
la formarea forei portante Z i valoarea ei limit. Din acest punct de vedere, fora
portant ce este suportat de catre pneu poate fi divizat astfel:
1. Forta portanta (
anv
Z ) pe care o poate suporta (prelua) anvelopa prin
componentele sale (carcasa, breker, banda de rulare etc); n acest caz sunt
dou situaii:
a) fora portant a pneului fr presiunea interioar a aerului deci
neumflat;
b) capacitatea de meninere a formei de ctre aerul comprimat, care
rigidizeaza pereii anvelopei, permind creterea capacitii pneului de
a prelua fore.
2. Fora portant a aerului comprimat, care la rndul ei se compune din:
a) componenta format din produsul dintre presiunea interioar a aerului
din pneu
i
p cu suprafaa de contact dintre pneu i drum A i
b) componenta ce rezult din creterea presiunii aerului din interiorul
pneului, ca urmare a
deformrii elastice n
suprafaa de contact.
n figura 2.2 sunt artate
componentele forei portante
st
Z a unui pneu n funcie de
deformaia elastic n
suprafaa de contact.
Semnificaia este urmtoarea:
1a fora portant a pneului
fr presiunea interioar a
aerului; 1b capacitatea de
meninere a formei geometrice
a pneului de catre presiunea
aerului; 2b fora portant
preluat de presiunea aerului
din pneu; 2b fora portant
rezultat din creterea
presiunii aerului din interiorul pneului n timpul deformrii elastice a acestuia.
Aa cum se vede i in figura 2.2, componenta 2a preia procentajul cel mai
mare din fora portant; contribuia structurii anvelopei componenta 1a
particip cu numai 15% i componenta de meninere a formei geometrice cu
aproximativ acelai procentaj. Componenta rezultat din creterea presiunii aerului
Fig.2.2. Componentele forei portante
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 20
(2b) are o influen foarte redus, astfel c, practic, presiunea interioar a aerului
din pneu rmne constant n timpul deformrii elastice a pneului n suprafaa de
contact.
Deci, aproximarea analitic a componentelor 2a i 2b se poate face:
A p Z
i i
= (2.6)
iar variaia forei portante
i
Z d dup deformarea z d se scrie:
z
p
A
z
A
p
z
Z
i
i
i
d
d
d
d
d
d
+ =
ntruct cel de-al doilea termen al sumei (
z
p
A
i
d
d
) are influen
nesemnificativ, se poate neglija, i variaia forei portante
i
Z d dupa deformarea
z d devine:
z
A
p
z
Z
i
i
d
d
d
d
(2.7)
Cele trei componente rmase, se pot combina astfel: o component a forei
portante a materialului pneului (1a) i o alt component ce reprezint o funcie a
presiunii interioare a aerului (1b+2a) vezi figura 2.3.
Fig. 2.3. Componenta presiunii interioare a aerului
) (
i st
p f a Z + = (2.8)
n care ) (
i
p f pentru anvelopele de autoturisme au o caracteristic aproape liniara.
Capacitatea portanta a unei anvelope este limitat de rezistena mecanic a
materialului din care este confecionat i de rezistena termic, deoarece nclzirea
anvelopei reduce rezistena i capacitatea att a cauciucului ct i a materialului
carcasei si brekerului.
ncrcarea roii cu sarcini verticale i capacitatea portant a roii 21
De la studiul rezistenei la rulare se tie c din cauza proprietilor histerezice
ale cauciucului se produce o pierdere de lucru mecanic generat de deformarea
anvelopei care influeneaz nu numai rezistena la rulare, ci i transformarea n
cldura i mrirea temperaturii anvelopei. O parte din cantitatea de cldura este
stocat n anvelop i o alt parte este eliminat n atmosfer prin convecie
(componenta de radiaie este neglijabil). La atingerea temperaturii de regim lucrul
mecanic de amortizare este egal cu corespondentul cantitii de cldur evacuat n
atmosfer. Daca ne referim la putere, atunci puterea consumat pentru nvingerea
rezistenei la rulare v R
r
se afl n echilibru cu energia caloric cedat n unitatea
de timp n atmosfer, T F
k
n care: este coeficientul de conductibilitate
termic,
k
F - suprafaa de rcire i T - diferena de temperatur ntre suprafaa
exterioar a pneului i mediul inconjurtor:
T F v R
k r
= (2.9)
Pentru a explicita relaia (2.9) va trebui s analizm mai n detaliu producerea
rezistenei la rulare, pentru care ne vom folosi de modelul din figura 2.4.
Fig. 2.4. Producerea rezistenei la rulare
Proprietile elastice ale anvelopelor se pot infia n figura2.4.a ce
inlocuiete roata elastic. Fiecare din aceste elemente elastice cnd ajunge la
suprafaa de contact se comprim i dup aceea se destinde. Pentru elementele
elastice aflate n suprafaa de contact trebuie s se aib n vedere pe lng
proprietile elastice i apariia histerezisului, deci a unor pierderi cum este indicat
n figura 2.4.b. Din aceast cauz completm roata elastic i cu amortizoare (fig.
2.4.c), al caror lucru mecanic la trecerea prin suprafaa de contact se transforma n
cldur, fenomen ce produce rezistena la rulare.
Mrimea lucrului mecanic L pentru un amortizor elementar la trecerea prin
suprafaa de contact se poate evalua pentru situaii staionare, dac se aplic fora
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 22
de amortizare
s
Z a unui amortizor elementar n funcie de viteza de deformare
t
z
d
d
:
t
z
K Z
s
d
d
=
n care K este constant, z - deformaia n direcie radial (fig.2.4.a), Z -
deformaia maxim n dreptul axei de simetrie a roii (fig. 2.4.a). Lucrul mecanic
rezult din:
z d
t
z
K z Z L
s
= =
d
d
d d
iar prin integrare n funcie de timp n care lungimea suprafeei de contact este l i
viteza de deplasare a roii, constanta v :
z
t
z
k L
v l
=
d
d
d
/
(2.10)
Daca se consider c deformarea radial corespunde expresiei:
t z Z sin = cu
l
v
=
atunci lucrul mecanic pierdut devine:
( )
= =
0
2 2
/
0
2 2 2
d cos d cos t t k z t t z k L
v l
,
( )
2
2
= k z L
expresia ( ) k a fost scris n parantez pentru a indica c aceast marime este
aproximativ constant la cauciuc i la materialele polimerice n general.
L reprezint lucrul mecanic al amortizoarelor imaginate ce corespund
suprafeei de contact dintre pneu i calea de rulare.
Rezistena la rulare este lucrul mecanic raportat la drumul parcurs, deci:
( )
l
k z
l
L
R
r
1
2
2
= = (2.11)
Dac se intoduce constanta elastic radial c ce rezult din raportul fora
portant Z i deformaia maxim z
z
Z
c =
precum i mrimea adimensional |
.
|
\
|
c
k
, atunci rezistena la rulare devine:
Z
l
z
c
k
R
r
=
2
(2.12)
ncrcarea roii cu sarcini verticale i capacitatea portant a roii 23
iar coeficientul rezistenei la rulare:
l
z
c
k
f =
2
cunoscnd rezistena la rulare i, folosind relaia (2.9) se poate determina diferena
de temperatur dintre suprafaa pneului i mediul inconjurtor:
v
F
Z
l
z
c
k
T
k
=
2
(2.13)
Temperatura crete liniar cu viteza de deplasare v , aceast dependen fiind
influenat de mrimea
coeficientului de conductibilitate
termic .
Creterea temperaturii
pneului o dat cu creterea
vitezei de deplasare, pentru
diferite mrimi ale reaciunii
normale la roat Z i ale
amplitudinii de amortizare a
pneului c k / este prezentata in
figura 2.5.
Din ecuatia (2.13) i din
figura 2.5 rezult factorii care
contribuie la creterea
temperaturii pneului. Deoarece
parametrii si
k
F nu pot fi
influenai, valoarea T depinde
la vitez constant de
expresia Z
c
k
:
( )
Z
c
k
T
ta cons v
= tan
(2.14)
Deducem din expresia (2.14) c pentru a nu se obine temperaturi prea mari la
pneurile n rulare, trebuie ca amortizarea cauciucului , deci ( ) k , s fie ct mai
mic posibil i deformarea anvelopei ) / ( c Z s nu fie prea mare, indiferent de
mrimea sarcinii Z i de elasticitatea anvelopei.
Fig. 2.5. Influnea vitezei de deplasare
asupra temperaturii pneului
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 24
Fig. 2.6.Puterea consumat pentru nvingerea rezisteei la rulare
Aplicarea practic a acestor consideraii este aratat n figura 2.6. Pentru o
temperatur maxima dat, pneurile folosite pentru viteze de deplasare mari trebuie
s prezinte o rezisten la rulare mai redus. Pentru aceleai caracteristici
constructive ale pneului ( . const k = ) i sarcina . const Z = , acest lucru se poate
realiza prin mrirea valorii constantei elastice " "c . Din aceasta cauz, pneurile
destinate folosirii la autoturisme ce se deplaseaza cu viteze mari sunt n principiu
mai dure dect cele folosite pentru viteze de deplasare mai reduse.
2.3.Distribuia presiunii n suprafaa de contact
ncrcarea normal a roii Z se distribuie pe suprafaa de contact A ca n
figura 2.7. ntre ncrcarea normal Z i presiunea (
z
p ) pe suprafaa de contact
( A) exist relaia:
A p A p Z
A
z z
= =
0
d (2.15)
ncrcarea roii cu sarcini verticale i capacitatea portant a roii 25
Fig. 2.7.Distribuia de presiune pe suprafaa de contact
Dac se are n vedere o valoare medie a presiunii normale pe suprafaa de
contact, atunci mrimea acesteia (vezi relaia 2.8) se poate deduce cu relaia:
( )
i z
p f a A p + =
sau
( )
i z
p f
A A
a
p + =
1
Daca inem seama de faptul c " "a (capacitatea portant a pneului neumflat
vezi paragraful 2.2) are valoare relativ mic n raport cu ( )
i
p f i c ( )
i
p f este n
principiu proporional cu suprafaa de contact dintre pneu i calea de rulare se
poate aproxima:
i z
p p (2.16)
adic, presiunea pe suprafaa de contact este aproximativ egal cu presiunea aerului
din pneu. Dac ns privim cu atenie figura 2.3, observm c, cu ct este mai
descendent curba, cu att presiunea pe suprafaa de contact
z
p devine mai mic
dect presiunea interioar a aerului din pneu
i
p . Aceast diferen este mai mare la
pneurile de autocamioane i mult mai mic la pneurile de autoturisme. n figura 2.8
sunt prezentate rezultatele unor msurtori executate la pneuri de autocamioane,
(
2
cm
daN
p
z
lungimea
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 26
care aa cum s-a menionat prezint un comportament degresiv al valorii
z
p
fa de presiunea interioar a aerului din pneu
i
p pentru aceast for portant Z .
Fig.2.8. Valori experimentale de la pneuri de autocamion
Fig.2.9. Lungimea suprafeei de contact n funcie de sarcina normal
ncrcarea roii cu sarcini verticale i capacitatea portant a roii 27
Variaia lungimii suprafeei de contact dintre pneu i cale pentru diferite valori
ale sarcinii pe roata
N
Z i tipuri de pneuri n funcie de raportul
N
Z Z / este
prezentat n figura 2.9. n acest raport
N
Z este sarcina nominal specificat de
ctre productorii de anvelope, iar Z reprezint ncrcarea roii respective n
activitatea curenta. Modificarea lungimii l a suprafeei de contact se situeaz n
exemplele date pentru
N
Z Z = ntre 18.26 cm i este doar cu puin mai mare la
pneurile de autocamioane dect la pneurile de autoturisme.
Laimea b a suprafeei de contact corespunde aproximativ cu limea benzii
de rulare a punilor respective.
Mrimea suprafeei de contact se poate determina daca se scade cca 10%
pentru rotunjirea colurilor cu expresia:
b l A 9 , 0 (2.17)
Distribuia presiunii normale
z
p pe ltimea suprafeei de contact este sub
form de a. Cele dou maxime provin din influena parilor laterale ale anvelopei
i sunt cu att mai proeminente cu ct deformarea elastic a pneului este mai mare.
Distribuia presiunii pe suprafaa de contact n lungimea suprafeei este
influenat de valoarea presiunii interioare a aerului din pneu i de mrimea vitezei
de deplasare. Cu creterea presiunii aerului i a vitezei de deplasare (influena
forelor centrifuge), distribuia presiunii n lungimea suprafeei este plan la mijloc
i aproximativ o parabol de gradul 2 la margini. Odat cu mrirea sarcinii pe roata
presiunea devine mai plat i la margini. Rezultanta Z a presiunii pe suprafaa de
contact
z
p , n condiii statice, acioneaz prin centrul suprafeei de contact. La
roata ce ruleaz, aa cum se tie de la studiul rezistenei la rulare, este dispus n
partea din fa a suprafeei de contact. n figura 2.10 se arat deosebirile;
suprafeele delimitate de cele dou curbe sunt la fel de mari, pentru c incrcarea
este aceeai.
Fig. 2.10. Poziia rezultantei presiunii pe suprafaa de contact (static vs. rulare)
Apariia reaciunii tangeniale X modific distribuia presiunii pe suprafaa de
contact (fig.2.11). La roata antrenat, fora F din axa roii deplaseaz mijlocul
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 28
suprafeei de contact ceva mai n spate, din care cauza presiunea devine mai mare
dect n faa suprafeei de contact. La roata frnat, fora F din axa roii
acioneaza invers i ca urmare presiunea este ceva mai mare n partea din fa.
Fig.2.11. Distribuia de presiune n suprafaa de contact
(roata antrenat i roata frnat)
2.4.Rigiditatea rotii elastice
Raportul dintre variaia sarcinii normale pe roata Z i modificarea deformaiei
pe care o produce ( Z ) se numete constant elastic sau rigiditatea pneului i se
noteaz cu c .
Deci:
z
Z
c
d
d
= (2.18)
Pentru c fora Z nu este o funcie liniar de deformaia z (de cele mai multe
ori mai nti progresiv, iar apoi degresiv), rigiditatea pneului ( ) c nu este de fapt
constant, ci o mrime variabila. Din aceasta cauza, se poate considera c
rigiditatea este aproximativ constant pe un anumit domeniu al curbei. Acest
domeniu se situeaz la sarcina static pe roat
st
Z i la deformarea elastic
st
z :
st
Z Z
z
Z
c = |
.
|
\
|
=
d
d
ncrcarea roii cu sarcini verticale i capacitatea portant a roii 29
Fig. 2.12. Fora Z funcie de deformarea pneului z
Dac deformaia elastic pneului se mrete cu valoarea
din
z sau se reduce cu
aceast valoare, fora
din
Z se modific aproximativ cu relaia:
din din
z c Z = (2.19)
Ca o msur pentru sigurana n deplasare, precum i pentru o solicitare
minim a cii de rulare o reprezint conform relatiei (2.5) raportul existent dintre
sarcina totala si sarcina statica.
din
st st
din st
st
z
Z
c
Z
Z Z
Z
Z
+ =
+
= 1 (2.20)
Conform figurii 2.12, raportul c Z
st
/ este egal cu mrimea s :
c
Z
s
st
= (2.21)
Aceast mrime constituie o msura pentru sarcina suplimentar ( )
din
Z ,
raportat la sarcina static ( )
st
Z , corespunztoare unei deformaii elastice
din
z ; de
exemplu, ca urmare a existenei unor denivelri pe calea de rulare
s
z
Z
Z
din
st
din
= (2.22)
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 30
Sarcina total Z raportat la sarcina static
st
Z - conform relaiei (2.20) este
egal cu:
s
z
Z
Z
din
st
+ =1 (2.23)
Fig. 2.13. Mrimi raportate pentru pneuri radiale i diagonale
n figura 2.13 sunt reprezentate grafic corelaiile dintre valorile c z s
st
/ = i
sarcina static
st
Z pentru pneuri de autoturisme i de autocamioane. Dup cum se
vede, valorile se situeaz la pneurile diagonale intre 1,72,1 cm, iar pneurile
radiale sunt mai elastice i dau pentru o anumit deformare elastic a pneului
din
z
sarcini suplimentare ( )
din
Z mai mici.
Avnd n vedere c valorile lui " "s se situeaz ntr-un spectru destul de redus,
cnd presiunea interioar a aerului din pneu corespunde sarcinii nominale, ne ofer
posibilitatea s apreciem rigiditatea " "c pentru sarcina nominal. Graficul din
figura 2.13 cuprinde date pentru pneuri identice la diferite sarcini. Cnd s-a mrit
sarcina, s-a mrit i presiunea aerului din pneu n aa fel ca mrimea " "s s rmn
aproximativ constant. Daca nu s-ar fi mrit concomitent i presiunea aerului,
deformarea elastic a pneurilor s-ar fi mrit i cu aceasta ar fi crescut i rezistenta
la rulare i temperatura pneului.
ncrcarea roii cu sarcini verticale i capacitatea portant a roii 31
n analiz fcut pn acum s-a considerat c rularea are loc pe cale plan i
neted. n realitate suprafaa drumului nu este mereu neted i uniform i ca
urmare rigiditatea pneului se modific cnd trece peste anumite denivelri. O dat
cu reducerea razei de curbura a proeminenei (fig.2.14) se reduce i rigiditatea
c i deci n acel loc anvelopa devine mai elastic (deformabil). La pneul diagonal
acest lucru se manifest mai pronunat dect la pneul radial. Cu toate acestea, n
cazul proeminenelor mici, dupa msurtori, s-a constatat c rigiditatea pneurilor
radiale cu a pneurilor diagonale (pentru cm 3 = ).
Fig. 2.14. Rigiditatea pneului funcie de raza de curbur
2.5. Capacitatea de amorizare a lui penului
S-a explicat c la pneuri apar n timpul rulrii, prin comprimare si destindere,
pierderi prin histerezis, deci o oarecare atenuare.
Fora de atenuare, respectiv de amortizare
s
Z , acioneaz n general contrar
direciei de micare
t
z
d
d
. Dac n afar de aceasta se consider c fora de
amortizare este proporional cu viteza, atunci:
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 32
t
z
k Z
s
d
d
= (2.24)
Dei aa cum s-a spus fora de amortizare este orientat contrar direciei
vitezei, mrimea acesteia nu este proporionala cu viteza, ea fiind proporionala cu
distana parcurs i ntr-un domeniu mai larg de frecven, deci:
. const k = (2.25)
aa cum rezulta i din figura 2.15.
Fig. 2.15. Reprezentarea grafic a parametrului k
Ca valoare orientativ se poate considera n cazul pneurilor:
1 , 0
c
k
(2.26)
Expresia (1.62) este adimensional i poate fi denumit msura dubl a
amortizrii pneului. Parametrul care definete rigiditatea pneului c a fost analizat
n paragraful 2.4.
3
NCRCAREA LATERAL A PNEULUI
n acest capitol se trateaz forele orizontale, laterale precum i momentele i
acceleraiile corespunztoare acestora. La nceput se va face o analiz succint
asupra solicitrilor i deformrilor existente.
3.1. Fore laterale, momente de stabilizare, unghiuri de deviere lateral.
n figura 3.1. se arat c aciunea forei laterale F
y
i reaciunea lateral a cii
de rulare Y este asemntoare cu aciunea
descris la capitolul 1 ntre fora F i
reaciunea tangenial X. De aceea se pot
face consideraii asemntoare i asupra
mrimii coeficientului de aderen i
asupra deformaiei, respectiv asupra
alunecrii. Deasemenea se pot face
asemenea consideraii asupra influenei
vitezei de deplasare, asupra influenei strii
cii de rulare (umede sau uscate) i altele.
Pentru a se putea distinge, reaciunea
tangenial longitudinal este notat cu X i
reaciunea lateral cu Y. Acest lucru este
necesar atunci cnd fenomenele se trateaz
simultan.
La alunecarea longitudinal a,corespunde
alunecarea transversal a
s
a crei
semnificaie se va trata n studiul ce
urmeaz. Din cauza forei F
y
ce acioneay
asupra axei roii ca n figura 3.1, roata nu se
rostogolete n direcia X ci nclinat n
funcie de viteza v cu unghiul . Alunecarea
lateral numit i transversal se definete
prin componentele vitezei sin V ,
ndreptat n direcia Y i cos V , n
Fig.3.1. Aciunea forei laterale
i reaciunea cii de rulare
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 34
direcia x, respectiv:
tg
V
V
a
s
= =
cos
sin
(3.1)
Fig.3.2. Unghiul de deviere lateral a pneului
Alunecarea lateral a
S,
la fel ca n cazul celei longitudinale, este dependent de
reaciunea lateral Y, iar raportul dintre reaciunea lateral Y i reaciunea normal
a cii de rulare Z se numete fora lateral specific i se noteaz cu
S:
Z
Y
S
=
(3.2)
iar reprezenterea grafic a dependenei lui
S
de alunecarea lateral este artat n
figura 3.3.
Fig.3.3. Dependena forei laterale specifice de alunecare relativ
ncrcarea lateral a pneului 35
Pentru valorile reduse ale alunecrii laterale, dependena este aproape liniar i
predomin deformarea elastic n direcie transversal, iar la valori mai mari ale
alunecrii fora lateral specific nregistreaz o cretere nesemnificativ.
Prin analogie cu alunecarea longitudinal, trebuie s definim i n acest caz,
coeficientul de aderen lateral
S
egal cu valoarea maxim a forei laterale
specifice
Smax
( =
max S S
) i coeficientul de frecare la alunecare lateral
Sa
care
apare la alunecare lateral total, respectiv 1 =
s
a . Dar aceast situaie nu este nici
posibil i nici necesar. Nu este posibil, pentru c la tg a
s
= =1 ar nsemna
= 45 ; dar direcia lateral a alunecrii presupune ca = 90
o
(figurile 3.2 i 3.3)
ceea ce ar nsemna = 90 tg . Pe de alt parte un automobil poate fi meninut n
circulaie dirijat numai pentru valori mici ale unghiurilor de deviere lateral (sub
10
o
).
Important de reinut, este faptul c analogia ntre curba de dependen
) (a f = i ) (
s
S
a f =
este valabil numai pentru prima parte a curbei, adic la
valori mici ale alunecrii laterale. Se obinuiete ca n cazul solicitrii laterale a
pneurilor s nu se foloseasc alunecarea a
S
i nici tg, ci direct unghiul - care se
numete unghi de deviere lateral. Diagrama se traseaz pentru valoarea
= 15 10K .Valoarea maxim a forei laterale specifice este deci:
Z
Y
s s
max
= = (3.3)
Fora ce acioneaz n direcie transversal F
y
(fig.3.1.) d natere n afara
reaciunii laterale Y i la dou momente M
zx
i M
S
n suprafaa de contact dintre
pneu i calea de rulare. Momentul M
zx
apare datorit faptului c roata deplasndu-
se lateral determin ca reaciunea Z s nu mai aib punctul de aplicaie sub centrul
roii.
Momentul M
S
- numit moment de stabilizare este o consecin a faptului c
nici reaciunea lateral Y nu acioneaz n mijlocul suprafeei de contact dintre pneu
i cale ci deplasat ctre spate cu
distana X (fig.3.4.). Momentul
M
S
are tendina de a reduce
unghiul de deviere lateral .
Mrimea distanei X se obine din:
x
Y
x Y
Y
M
s
=
= (3.4)
Dependena momentului de
stabilizare M
S
i distanei X n
funcie de unghiul de deviere
lateral este prezentat n figura
3.5.
Fig.3.4. Momentul de stabilizare a roii
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 36
Fig.3.5. Variaia momentului de stabilizare i a poziiei punctului de
aplicare a forei laterale funcie de unghiul de deviere lateral a pneului
3.2. Caracteristicile unghiului de deviere lateral
n vederea clarificrii interaciunii pe care o produce mecanismul format din
fora lateral, momentul de stabilizare i distana X ne vom folosi de modelul din
figura 3.6. n acest scop se pornete de la presupunerea c axa pneului este imobil,
iar calea de rulare, reprezentat de un tambur de dimensiuni mari, se afl n
micare. Pneul este aezat pe tamburul menionat, cu nclinare fa de direcia de
mers cu unghiul de deriv .
Cu litera A s-a notat punctul de pe circumferina pneului care indic intrarea n
suprafaa de contact dintre pneu i tambur. Dac tamburul ncepe s se roteasc,
punctul A nu se mic n planul jantei ci n direcia micrii cii de rulare
(suprafaa exterioar a tamburului) i dup ce parcurge distana "a" ajunge n
punctul A'. n acest punct - dup cum indic arcul elementar se produce o for.
Dup continuarea micrii, punctul din suprafaa de contact se distaneaz din ce n
ce mai mult fa de planul jantei i fora amintit crete i ea din ce n ce mai mult,
cptnd valoarea maxim la sfritul suprafeei de contact i valoarea zero n afara
suprafeei. Suma tuturor forelor arcurilor elementare determin reaciunea lateral
Y Cu ct unghiul de deviere lateral devine mai mare, cu att trebuie s se
mreasc i reaciunea lateral Y.
Atta timp ct punctele din suprafaa de contact a pneului ader pe suprafaa
tamburului n rulare i considernd c arcurile elementare imaginare dispun de o
caracteristic de arc liniar, ntre reaciunea lateral Y i unghiul de deviere lateral
exist o proporionalitate (fig.3.3. pentru de valori mici):
ncrcarea lateral a pneului 37
= k Y (3.5)
n care k
este un coeficient de proporionalitate.
Fenomenul se nscrie - aa cum s-a mai amintit - n domeniul deformrii
elastice a pneului.
n figura 3.6., putem observa destul de
clar, faptul c rezultanta tuturor forelor
arcurilor elementare nu poate avea punctul
de aplicaie n centru ci n spatele centrului
suprafeei de contact. Pentru unghiurile de
deviere lateral de valori mici i innd
seama de faptul c punctele care intr n
suprafaa de contact nu alunec i c
arcurile elementare ce compun pneul au
caracteristica liniar distribuia deformrii
laterale are forma unui triunghi. n acest
caz, punctul de aplicaie al reaciunii
laterale Y rmne acelai i distana X este
constant:
. const x = (3.6)
fenomen ce poate fi vzut i n figura 3.5.
Din aceast cauz i creterea momentului
de stabilizare M
S
este - pentru unghiurile
de valori mici - liniar (fig.3.5.):
x k M
s
= (3.7)
Mrimea distanei X se poate aprecia
dup figura 3.6. Centrul de greutate al
triunghiului, msurat din fa este dispus la
l 3 2 , deci distana X calculat din
centrul suprafeei de contact este:
l l l x = =
6
1
2
1
3
2
(3.8)
n realitate, deformarea elastic a
pneului la captul din spate al suprafeei de
contact nu poate deveni brusc zero
(fig.3.7.). Datorit acestui fapt, n
conformitate cu modelul nostru, dup
captul din spate al suprafeei de contact
nc mai exist elemente de pneu tensionate
- deci mai sunt arcuri elementare ceea ce
face ca rezultanta Y s se deplaseze spre
spate cu o distan X ceva mai mare dect cea calculat cu relaia (3.8.). Totui, aa
Fig.3.6. Poziia punctului de
aplicare a reaciunii laterale
Fig.3.7. Deformarea elastic a
pneului
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 38
cum se arat n figura 3.7., punctele de pe suprafaa pneului sunt deviate chiar mai
nainte ca ele s ating suprafaa de contact.
Dac unghiul de deviere se mrete n continuare nu va mai fi aderen pe
suprafaa de contact i punctele de pe periferia pneului (banda de rulare) ncep s
alunece (figurile 3.6. i 3.7.). Reaciunea lateral va crete n continuare - chiar n
prezena alunecrii pariale numai c aceast cretere nu mai este proporional cu
unghiul i are un aspect regresiv.
n figura 3.8. se arat variaia eforturilor unitare laterale p'
y
la creterea
reaciunilor laterale Y. Se observ c variaia eforturilor p
y
se aseamn cu aceea a
eforturilor tangeniale longitudinale p
x
(vezi figura 1.12.).
Fig.3.8. Variaia eforturilor unitare laterale
Dac eforturile unitare laterale devin mai mari dect limita local de aderen
p
z,
atunci apare patinarea i ele descresc pn la:
p p
z a ya
=
nsumarea eforturilor unitare de pe ntreaga suprafa de contact pneu - cale
reprezint fora lateral, mai exact reaciunea lateral:
=
A
y
dA p Y
0
(3.9)
Centrul de greutate al suprafeei epurei din figura 3.8. se deplaseaz ctre
centrul suprafeei de contact, la creterea reaciunii laterale Y i ca urmare se
micoreaz i distana X (vezi fig.3.5.).
Variaia regresiv a reaciunii laterale Y i scderea distanei X determin ca
momentul de stabilizare s capete valoarea maxim la valori relativ mici ale
unghiului de deviere lateral (fig.3.5.).
ncrcarea lateral a pneului 39
n tabelul 3.1. sunt prezentate valorile parametrilor analizai mai nainte,
pentru a se forma o imagine asupra gradului de influenare a acestora asupra
capacitii de deplasare a automobilelor.
Tabelul 3.1.
C
o
e
f
i
c
i
e
n
t
u
l
d
e
p
r
o
p
o
r
i
o
n
a
l
i
t
a
t
e
a
l
d
e
f
o
r
m
r
i
i
l
a
t
e
r
a
l
e
k
C
o
e
f
i
c
i
e
n
t
u
l
d
e
c
d
e
r
e
l
a
r
a
l
p
e
n
t
r
u
f
o
r
C
o
e
f
i
c
i
e
n
t
u
l
d
e
c
d
e
r
e
l
a
t
e
r
a
l
p
e
n
t
r
u
c
u
p
l
u
l
P
n
e
u
l
J
a
n
t
a
S
a
r
c
i
n
a
p
e
r
o
a
t
a
Z
[
d
a
N
]
P
r
e
s
i
u
n
e
a
i
n
t
e
r
i
o
a
r
a
a
e
r
u
l
u
i
d
i
n
p
e
n
u
[
d
a
N
/
c
m
]
[
d
a
N
/
]
[
d
a
N
/
r
a
d
]
D
i
s
t
a
n
a
d
e
f
u
g
x
[
m
m
]
[
d
a
N
/
]
[
d
a
N
/
r
a
d
]
[
d
a
N
/
]
[
d
a
N
/
r
a
d
]
5,60-15 4J x 15 300 1,8 51,2 2932,2 28,3 7,1 409,3 0,16 9,41
165 R 15 4J x 15 300 1,8 63,5 3637,1 23,4 2,5 143,2 0,08 4,60
5,20-13 4j x 13 250 1,6 31,2 1789,3 32,0 5,25 300,8 - -
6,00-13 4j x 13 300 1,4 30,9 1769,0 49,1 6,4 367,7 - -
165 HR 15
suport textil
4 1/2 J x 15 300 1,8 51,4 2947,2 37,4 - - - -
175 HR 14
suport oel
5J x 14 350 2,0 67,0 3838,2 33,2 - - - -
185 HR 14
suport textil
6J x 14H
2
350 2,3 63,5 3638,3 34,6 7,1 408,2 0,38 21,9
6,50-16 4 1/2E x 16 600 2,5 86,1 4931,0 30,4 - - - -
6,50 R 16 4 1/2E x 16 600 2,5 92,7 5311,8 38,9 - - - -
9,00-20 7,00-20 2000 5,5 231,6 13268,7 29,3 - - - -
9,00 R 20 7,00-20 2000 5,5 293,6 16820,5 38,1 - - - -
3.3. Influena sarcinii pe roat, a vitezei de deplasare i a strii de
umiditate a drumului asupra forei laterale specifice
S
Cnd s-a analizat (paragraful anterior) reaciunea tangenial specific s-a
inut seama i de influena pe care o exercit asupra acesteia sarcina pe roat, viteza
de deplasare i starea de umiditate a drumului. n cele ce urmeaz se va analiza
acelai lucru i pentru fora lateral specific. n figura 3.9. este prezentat
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 40
dependena forei laterale specifice de
sarcina pe roat pentru diferite mrimi
ale unghiului de deviere lateral, iar n
figura 3.10 interdependena forei
laterale Z, a momentului de stabilizare
M
S,
a distanei de fug x, a sarcinii pe
roat Z i unghiul de deviere lateral
n diferite forme de reprezentare.
Astfel n figura 3.10.a. se arat
dependena forei laterale Y, de
unghiul de deviere lateral pentru
diferite mrimi ale sarcinii pe roat Z.
Reprezentarea momentului de
stabilizare (M
S
) i a distanei de fug
(x) n funcie de unghiul de deviere
avnd ca parametru sarcina Z este
artat n figurile 3.10.b. i 3.10.c..
Fig.3.9. Variaia forei laterale specifice n
funcie de unghiul de deviere laterel
Fig.3.10. Influena unghiului
de deviere lateral a pneului,
a sarcinii pe roat i a
momentului de stabilizare
ncrcarea lateral a pneului 41
Pe lng reprezentarea grafic, n funcie de unghiul de deviere sunt
prezentate i dependenele Y, M
S,
i X n funcie de sarcina pe roat Z folosind ca
parametru unghiul (figurile 3.10.d, e i f). Reprezentarea ( ) Z f
MS
= nu este
uzual din cauz c se intersecteaz curbele (fig.3.10.e.). Exist ns, o alt
reprezentare a funciei ( )
M
f Y
S
= - figura 3.10.g.; n care apar ca parametrii
unghiul de deviere lateral i sarcina pe roat Z. Liniile pentru distana de fug X
(constant) sunt drepte n conformitate cu relaia (3.4.).
a) b) c)
Fig.3.11. Influena vitezei de deplasare asupra: a) reaciunii laterale Y, b)
momentului de stabilizare M
S
i c) distanei de fug X
Influena vitezei de deplasare asupra reaciunii laterale Y, asupra momentului
de stabilizare M
S
i asupra distanei de fug X este prezentat n figura 3.11.. Dup
cum se observ, n partea de cretere liniar, respectiv n partea n care predomin
deformarea pneului, influena vitezei este nesemnificativ. De abia cnd apare
alunecarea parial ncepe s devin vizibil influena vitezei de deplasare. Aadar,
creterea vitezei pentru aceeai mrime a unghiului de deviere lateral determin
descreterea reaciunii laterale Y, a momentului de stabilizare M
S
i chiar a distanei
de fug x. Se mai observ c odat cu creterea vitezei, la aceeai valoare a
reaciunii laterale se mrete unghiulde deviere lateral (fig.3.11.). Distana de fug
X descrete n domeniul unghiurilor de deviere lateral de valori mai ridicate,
odat cu creterea vitezei de deplasare, deoarece din cauza aderenei mai reduse
elementele pneului n partea din spate a suprafeei de contact transmit fore de
valori mai mici (fig.3.11.c.). Din cauza celor artate pn acum, momentul de
stabilizare M
S,
se reduce la creterea vitezei V pentru aceeai valoare a unghiului de
deviere lateral (fig.3.11.b.).
Se observ totui c pe suprafeele de drum uscate, influena vitezei nu este
prea mare fa de influena acesteia pe drumurile acoperite cu ap. n figura 3.12.
este prezentat influena grosimii stratului de ap i a vitezei de deplasare asupra
forei laterale i a momentului de stabilizare i distanei de fug, n funcie de
unghiul de deviere lateral. Se vede din cele ase grafice, c influena vitezei de
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 42
deplasare este mai evident pe drumurile ude i devine din ce n ce mai influent cu
creterea grosimii stratului de ap de pe calea de rulare. Diagramele din figurile
3.12.a. i 3.12.d. arat faptul c mrirea stratului de ap n unitatea de timp nu
reduce numai fora lateral maxim admisibil Y
max
ci reduce i creterea (sporul)
forei laterale (/ n loc de /).
Fig3.12. Influena grosimii stratului de ap i a vitezei de deplasare asupra forei
laterale i a momentului de stabilizare i a distanei de fug, n funcie de unghiul
de deviere lateral
i momentul de stabilizare M
S
(figurile 3.12.b i e) devine mai mic atunci cnd
suprafaa cii de rulare este ud, iar aceast tendin se vede clar i din modificarea
distanei de fug X a pneurilor.
Dup cum se tie - de la cursul de dinamica autovehiculelor - poriuea de
contact uscat dintre pneu i calea de rulare se deplaseaz ctre partea din spate a
suprafeei de contact odat cu creterea grosimii stratului de ap ce acoper calea
de rulare. Ca urmare i eforturile unitare laterale se deplaseaz ctre partea din
spate a suprafeei de contact, deci distana de fug X crete (fig.3.12.c.).
Asupra acestor fenomene o influen hotrtoare o are arhitectura benzii de
rulare.
3.4. Reaciunea tangenial maxim
La capitolul 1, s-a stabilit c reaciunea tangenial longitudinal maxim se
obine cu expresia:
ncrcarea lateral a pneului 43
Z
Xmax
=
dac n suprafaa de contact nu sunt i fore care acioneaz n direcia lateral
( 0 Y = ).
n prezena reaciunii laterale, deci la apariia celor dou reaciuni orizontale
orizontale X i Y, suma geometric a celor dou fore nu trebuie s depeasc
aderena, adic:
Z Y X +
2 2
(3.10)
Expresia 3.10 se poate reprezenta grafic cu ajutorul unui cerc - aa numitul
cerc al lui Kamm - artat n figura 3.13.. Dac suma geometric a forelor X i Y
este mai mare dect raza cercului Z atunci roata patineaz.
Este cunoscut faptul c pentru un pneu, coeficientul de aderen depinde de
amestecul de cauciuc folosit, de profilul pneului, de caracteristicile drumului i de
alunecare. Se nelege de aici c valoarea coeficientului nu este independent de
structura forelor X i Z. Reaciunea longitudinal X determin o alunecare n
direcie longitudinal, iar reaciunea transversal Y determin o alunecare
perpendicular pe aceasta. ntruct alunecarea depinde i de profilul pneului care se
deformeaz elastic diferit - lateral fa de longitudinal - ceea ce se obine de fapt,
nu este un cerc, ci aa cum se arat cu aproximaie n figura 3.14. o elips. Punctele
menionate spaial n figur, indic valorile maxime ce sunt independente ntre ele,
respectiv i
S.
Dar aderena n direcie longitudinal trebuie vzut distinct n
cazul antrenrii i n cazul frnrii, ntruct dup cum rezult din figura 3.15.
coeficientul de aderen n direcie longitudinal pentru 0 = Y este mai mare n
cazul antrenrii dect n cazul
frnrii.
n prezena reaciunii laterale Y, coeficientul de aderen n direcie lateral
S
este mai mare la roile frnate dect la roile antrenate. Dac suprafaa drumului
este ud, aceste diferene descresc progresiv deoarece i valorile fiecruia se
micoreaz; configuraia curbelor rmne ns asemntoare i n cazul cnd
grosimea stratului de ap se mrete i n cazul cnd se mrete viteza de deplasare
(fig.3.15.).
Fig.3.13. Cercul lui Kamm
(cercul aderenei)
Fig.3.14. Variaia forelor specifice n funcie
de viteza de deplasare a autovhiculului
0,25
0,50
0,75
1,00
drum uscat
02 mm
0,5 mm
1,0 mm
2,0 mm
grosimea apei
0,50
0,25
2,0 mm
1,0 mm
1,00
0,75
0,2 mm
0,5 mm
grosimea apei
drum uscat
0,50
0,25
2,0 mm
1,0 mm
1,00
0,75
02 mm
0,5 mm
grosimea apei
drum uscat
s
v=50 km/h
s
v=80 km/h
0 1,00 0,75 0,50 0,25 0,25 0,5 0,75 1,00
(franare) (antrenare)
s
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 44
Fig.3.15. Inflena vitezei de deplasare i a strii cii
de rulare asupra aderenei
ncrcarea lateral a pneului 45
n continuare ne vom referi la devierea lateral a pneului produs de
aciunea concomitent a reaciunilor X i Y aa cum se arat n graficele din figura
3.16. n figura 3.16.a. este prezentat dependena reaciunii laterale Y de reaciunea
tangenial longitudinal X pentru frnare i antrenare, avnd ca parametru unghiul
de deviere lateral , iar n figura 3.16.c. dependena reaciunii Y de unghiul
pentru trei valori ale reaciunii longitudinale X. Se observ c pentru aceleai valori
ale unghiului de deviere lateral, reaciunea lateral Y crete la frnare i se reduce
la antrenare. n cazul forelor de frnare mari, reaciunea lateral descrete
deoarece depete limita impus de aderen.
Fig.3.16. Devierea lateral a pneului produs de
aciunea concomitent a reaciunilor X i Y
O situaie interesant apare la autovehiculul ce se deplaseaz n curb; La
roile antrenate, unghiul de deviere este mai mare dect la roile neantrenate, iar
la roile frnate mai mic (fig.3.16 c). n figurile 3.16.b., 3.16.d i 3.16.e este
prezentat influena reaciuni tangeniale X asupra momentului de stabilizare M
H
i a distanei de fug x
H,
raportate la reaciunea rezultant H compus din
reaciunile X i Y, din care cauz se noteaz cu M
H
i x
H.
innd seama de figura 3.17 se poate scrie:
Y X
H
2 2
+ = (3.11)
H x
M
H H
= (3.12)
n cazul roilor antrenate, momentul rezultant M
H
devine mai mare pentru
unghiuri de deviere lateral mai mari, comparativ cu situaia X=0, n cazul
60
0
10
0
2 0 6 4 8
0
0
0
0
0
0 4 2 6 8 10
0
0 2 6 4 8 10
40
20 4
8
100
200
Y [daN]
-200 -300
X antrenare
0 -100 100
M [daNm] N
x [mm]
300
200
Y [daN]
X=-100 daN
X=100 daN
X=0
-4
12
X=-100 daN
X=100 daN
X=0
-20
X=-100 daN
X=100 daN
X=0
300
X franare
=12
=8
=6
=4
=2
=12
0
-100
X franare
-300 -200
X antrenare
100 0 300 200
8
4
=1
=3
=5
M [daNm]
=8
N
-4
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 46
frnrii scade sau devine chiar negativ. n acest fel se comport i distana de fug
x
H
care la frnare se mut n partea din fa a roii (n avans).
Fig.3.17. Compunerea reaciunilor
n continuare vom vedea care este corelaia dintre alunecarea longitudinal
(antrenare i frnare) i reaciunea X pentru diferite valori ale unghiului de deviere
lateral . Figura 3.18. ne arat faptul c odat cu creterea unghiului de deviere
lateral i, ca urmare i cu creterea reaciunii laterale, valoarea reaciunii
tangeniale longitudinale X scade i n acelai timp creterea a x d d devine mai
plan n punctul de origine al axelor de coordonate.
Fig.3.18. Corelaia dintre alunecarea longitudinal
(antrenare i frnare) i reaciunea X pentru diferite
valori ale unghiului de deviere lateral
ncrcarea lateral a pneului 47
3.5. Influena unghiului de cdere al roilor asupra devieri laterale a
pneurilor
Pn acum s-a considerat c roata este perpendicular pe calea de rulare. Dac
ns, roata este nclinat fa de un plan vertical cu unghiul (fig.3.19.) funciile
Y=f() i M
S
=f() se modific (fig.3.20.).
Prezena unghiului de cdere la roi ()
influeneaz mrimea unghiului de deviere lateral
. Astfel la o for lateral constant i la un unghi
de cdere pozitiv (nclinare ctre exterior),
unghiul de deviere este mai mare dect la
unghiul de cdere nul (=0). Dac unghiul de
cdere este negativ (nclinare ctre interior),
valoarea unghiului de deviere este mai mic
dect la =0.La pneurile diagonale, influena
unghiului de cdere asupra unghiului de deviere
lateral este mai mare dect la pneurile radiale
(tab.3.1). Unghiul de cdere , influneaz i
momentul de stabilizare M
S;
care pentru un unghi
de deviere constant, se mrete odat cu creterea
unghiului de cdere (fig.3.20.b.).
Pentru valori mici ale unghiului de deviere
lateral relaia(3.5) poate fi extins:
= k Y (3.13)
n care reprezint constanta de proporionalitate a unghiului de cdere.
Fig.3.20. Influnen unghiului de cdere asupra reciunii laterale Y i a
momentului de stabilizare
Fig.3.19. Modelul de
calcul
4
10 6 8 2 4 0
0
-2
2
0
Ms [daNm]
6
8
10
0 4 2 8 6
10
200
100
Y [daN]
300
-100
=0
=3
=6
=-3
=-6
-4
a
a
a
a
a =-6
=-3
=6
=3
=0
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 48
Astfel se poate extinde i relaia (3.7.) pentru momentul de stabilizare:
M k
MS
+ = (3.14)
3.6 Acceleraiile transversale
La nceputul capitolului 3, s-a precizat c dup ce se va trata solicitrile i
deformaiile laterale se va analiza i acceleraiile corespunztoare acestora.
Deaceea n continuare se va analiza problema acceleraiilor separat n micare de
translaie i separat n micare de rotaie.
Fig.3.21. Model de calcul
Pentru explicarea fenomenului se utilizeaz dou sisteme de axe de
coordonate; un sistem (rigid) fix n spaiu x
0,
y
0,
z
0
cu versorii i
0,
j
0,
k
0
i un sistem x,
y, z cu versorul j situat n axa de rotaie a roii i versorii i i k situai n planul
median al roii. Acest sistem de coordonate denumit mobil nu se rotete odat cu
roata. Sistemele sunt cunoscute din figura 3.1., cu deosebirea c n figura 3.21.
intervine nclinarea roii cu unghiul de cdere .
Direcia de micare a roii nu urmeaz nici versorul i
0
fix n spaiu i nici versorul i
al sistemului de coordonate alunector, ci urmeaz o direcie deviat cu unghiul .
Pentru o mai bun caracterizare a forelor i momentelor ce acioneaz n mijlocul
suprafeei de contact, se recomand s se introduc suplimentar sistemul de
j
i
*
X
+
i
0
i
*
i
k
k
0
=k
*
j
*
j
0
+kM
z
+iM
z
-j
*
M
zy
-k
*
M
zy
-i
*
M
zy
j
*
Y
-iF
+jM
y
+jF
y
-kG
R
-k
*
G
R
ncrcarea lateral a pneului 49
coordonate legat de calea de rulare X
*,
Y
*,
Z
*
cu versorii i
*,
j
*,
k
*
care satisfac
condiiile i
*
=i i k
*
=k
0.
Pentru calculele urmtoare sunt necesare relaii ntre diferitele sisteme de
coordonate. Deoarece acestea trec din unul n cellalt prin unghiri de rotire mici
folosim legea general: dac un vector r se rotete cu unghiul (de valoare mic)
atunci vectorul r rotit cu sin= i cos 1 este valabil relaia:
. r x r r + =
(3.15)
Practic, aceasta nseamn de exemplu: din cauz c versorul i
*
rezult din i
0
prin rotirea n jurul unghiului ( )
k0
+ :
( ) ( ) j
i i
x
k i i
0
0 0 0 0
*
+ + = + + =
n expresia de mai sus descrie micarea de giraie a autovehiculului i
unghiul de direcie al roilor, deci micarea unghiular relativ, iar suma +
reprezint micarea unghiular absolut a roii sau j rezult din j
0
prin dou
rotaii ( )
i k
*
0
+ + cu reprezentnd rotaia unghiular pentru unghiul de
cdere; ca urmare ecuaia se modific dup cum urmeaz:
( ) ( ) | | j
i i k
j j
0
0 0 0
0
+ + + + + =
Neglijnd mrimile de ordinul 2 se obine:
( ) | | ( )
k
j
i i k
j j
0
0
0 0 0
0
+ + + + + +
Cele dou exemple i restul calculelor sunt cuprinse n sistemele:
i
0
j
0
k
0
i
j
k
1 + 0
-(+) 1
0 - 1
(3.16.)
I
0
j
0
k
0
i*
j*
k*
1 + 0
-(+) 1 0
0 0 1
(3.17)
i* j* k*
i
j
k
1 0 0
0 1
0 - 1
(3.18)
Forele i momentele sunt reprezentate n figura 3.21.b.; i provin din figurile
1.1. (capitolul 1) i 3.1. Forele F
y
,
G
r
i G
R
au fost prezentate modificat ca urmare
a apariiei unghiului de cdere , iar momentele M i M
z
au
primit suplimentar
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 50
indicele
y. Pentru o mai bun nelegeri i pentru uurarea relaiilor matematice,
forele i momentele au fost scrise sub forme de vectori.
n aceast situaie, ecuaia centrului de greutate se poate scrie:
k G
k
G
j
F
i
F k
Z j Y
i
X
dt
v
d
m r R y i
cgR
R
* *
*
*
+ + = (3.19)
Viteza centrului de greutate V
cgR
se specific n coordonatele sistemului mobil,
deoarece n aceast situaie se poate apela la componentele
t
x
d
d
i
t
z
d
d
.
Din:
k
t
z
j
t
y
i
t
x
VcgR
+ + =
d
d
d
d
d
d
(3.20)
se calculeaz acceleraia
t
k
t
z
t
j
t
y
t
i
t
x
k
t
z
j
t
y
i
t
x
t
VcgR
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
2 2
2
2
+ + + + + = (3.21)
La derivarea de exemplu a
t
i
d
d
, i se exprim conform sistemului 3.16. ca
versori fici i
0,
j
0,
k
0,
pentru c acesta n funcie de timp este nul. Din aceast cauz
cu ( ) j
i
i
0
0
+ + = dup derivare j
t t t
i
|
.
|
\
|
+ =
0
d
d
d
d
d
d
i j
0
se retranforma n
sitemul mobil deci o nou neglijare a mrimilor de ordinul 2: j
t t t
i
|
.
|
\
|
+ =
d
d
d
d
d
d
.
Derivarea celor trei versori luai mpreun:
j
t t
j
t t t
i
|
.
|
\
|
+ = |
.
|
\
|
+ =
d
d
d
d
d
d
d
d
d
d
0
k
t
i
t t
k
t
i
t t t
j
+ |
.
|
\
|
+ = + |
.
|
\
|
+ =
d
d
d
d
d
d
d
d
d
d
d
d
d
d
0 0
(3.22)
t
j
t t
k
d
d
d
d
d
d
0
= = j
Dac se introduc aceste ecuaii n relaia 3.21. i apoi n relaia 3.19. atunci
rezult dac se raporteaz totul la sistemul mobil de coordonate trei ecuaii
scalare i anume:
pentru coordonata i:
F
X
t t
t
y
t
x
m x R
=
(
|
.
|
\
|
+
d
d
d
d
d
d
d
d
2 2
2
(3.23)
pentru coordonata j:
( )
G
Z
F
Y
t t
z
t t t
x
t
y
m r y R
+ =
(
|
.
|
\
|
+ +
d
d
d
d
d
d
d
d
d
d
d
d
2
2
(3.24)
ncrcarea lateral a pneului 51
pentru coordonata k:
( ) Y
G G
Z
t t
y
t
z
m r c R
+ =
(
d
d
d
d
d
d
2
2
(3.25)
Dac se compar ecuaiile (3.23.) i (3.25.) cu ecuaiile (1.1) i (1.2) se
observ c n micarea spaial s-au adugat fore masice ce se compun din
produsul unor viteze de translaie i de rotaie (aceste adaosuri de regul se
neglijeaz). n partea dreapt a ecuaiei (3.25), apare datorit unghiului de cdere,
nc o component a forei laterale Y.
Ecuaia (3.24), care este nou ne spune c n principal masa roi inmulit cu
acceleraia lateral
t
y
2
2
d
d
este egal cu diferena dintre fora lateral Y (reaciunea
lateral) i fora lateral activ n axa roii F
y.
Ecuaia momentului n sistemul plan (vezi ecuaia 1.3.) corespunde ecuaiei de
rotaie a sistemului spaial:
M
t
D
cgR
cgR
=
d
d
(3.26)
n care D
cgR
este vectorul de rotaie i M
cgR
este vectorul momentului, ambele avnd
ca punct de referin centrul de greutate al roii. n utilizarea practic, ecuaia (3.26)
se simplific dac vectorul de rotaie D
cgR
se raporteaz la sistemul mobil x, y, z,
pentru ca n acest sistem momentele de inertie I
x,
I
y,
I
z
sunt constante i sunt uor de
exprimat la o rotaie simetric a roii. Rotaia D
cgR
n funcie de viteza unghiular
absolut :
k j i
z y x
+ + =
ale crei componente se reporteaz de asemenea la sistemul mobil este:
( ) ( )
( ) k
I I I
j
I I I
i
I I I D
z z y yz x xz
z yz y y x xy z xz y xy x x cgR
+
+ + + =
(3.27)
Dac se ntroduce n aceast relaie general pentru micarea de rotaie,
componentele cunoscute ale vectorului vitez de rotaie (cu neglijarea mrimilor
de gradul 2)
k
t t
j
t
i
t
|
.
|
\
|
+ + + =
d
d
d
d
d
d
d
d
i se ine seama c la roata echilibrat dinamic momentele de inerie centrifugale
I
xy
= I
xz
= I
yz
= 0 atunci vectorul de rotaie
.
d
d
d
d
d
d
d
d
k
t t
I
j
t
I
i
t
I D z y x cgR
|
.
|
\
|
+ + + =
(3.28)
Dup derivare, conform relaiei (3.26.) rezult:
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 52
t
k
t t
I
t
j
t
I
t
i
t
I
k
t t
I
j
t
I
i
t
I
t
D
z y x
z y x
cgR
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
2
2
2
2
2
2
2
2
|
.
|
\
|
+ + +
+
|
|
.
|
\
|
+ + + =
(3.29)
n cele din urm, dup introducerea variaiei n timp a vectorilor unitari,
conform relaiilor (3.22.) rezult:
+ + =
=
(
+
|
|
.
|
\
|
+ +
+ +
(
|
.
|
\
|
+
k M j M i M
k
t t
I
t t
I
j
t
I
i
t t t
I
t
I
z y x
y z
y y x
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
2
2
2
2
2
2
2
2
(3.30)
Vectorul momentului rezultant raportat la centrul de greutate C
gR
se compune
din: vectorul moment M care acioneaz asupra roii din direcia axei:
k
M
j
M
i
M
M
z y x
+ + =
i vectorul moment M
z
care acioneaz asupra roii de ctre calea de rulare:
k M
j
M i M M zz zy zx z
*
*
*
=
i vectorul
k r z z
, care reprezint momentul forelor din suprafaa de contact n
raport cu centrul de greutate C
gR.
n aceast situaie:
* *
*
k Z j Y
i
X
kz
+ + =
i
k
r j r
rz
=
*
*
Dac aceste momente se introduc n ecuaia micrii de rotaie respectiv, n
sistemul mobil de coordonate x, y, z i dac se ine seama de ecuaia (3.18.),
rezult pentru cele trei componente alte trei ecuaii scalare i anume:
pentru componenta i:
Z r Y r
M M
t t t
I
t
I zx x R x
+ + = |
.
|
\
|
+
d
d
d
d
d
d
d
d
2
(3.31)
pentru componenta j:
M
X
M M
t
I zz r zy y R
=
2
2
d
d
(3.32)
pentru componenta k:
ncrcarea lateral a pneului 53
M M M
t t
I
t t
I zy zz z R x
+ = +
|
|
.
|
\
|
+
d
d
d
d
d
d
d
d
2
2
2
2
(3.33)
n relaiile de mai sus, s-aconsiderat I
x
=I
z
iar I
y
a fost notat ca n relaia (1.3.)
cu I
R:
R y
I I = (3.34)
Membrul din stnga ecuaiilor (3.31.), (3.32.) i (3.33.),este asemntor cu
sistemul plan, dar la cele trei coordonate apare expresia momentului de inerie
nmulit cu acceleraia unghiular, adic
t
I
t
I R x
2
2
2
2
d
d
,
d
d
i
|
|
.
|
\
|
+
t d
I x
2
2
2
2
d
d
d
d
.
Intervine i o nou noiune momentul giroscopic :
(
+ |
.
|
\
|
+ = k
t
i
t t t
I M R gir
d
d
d
d
d
d
d
d
(3.35)
care creaz un cuplu, respectiv: prima micare de rotaie cauzeaz viteza
unghiular
t d
d
n direcia j, a doua micare de rotaie
t d
d
n direcia i i un
moment n direcia k.
n continuare, avnd n vedere cunotinele de la capitolul 1, momentul n jurul
axei y:
r R M M d r r zy
= = (3.36)
reprezint momentul rezistenei la rulare i momentul n jurul axei z (paragraful
3.1.)
M M s zz
= (3.37)
reprezint momentul de stabilizare al pneului.
3.7 Comportamentul pneului la intrarea n suprafaa de contact
Analiza fcut cu privire la corelarea dintre reaciunea lateral i unghiul de
deviere lateral, a avut n vedere ca aceti parametri sunt constani, adic
(t)=constant, respectiv Y(t)=constant. Dac unghiul de deviere variaz n timp,
atunci curbele prezentate pn acum nu mai sunt reale. Acest fenomen se poate
explica cu ajutorul figurii 3.6. i 3.22. ale crei curbe au fost trasate pe baza datelor
obinute prin ncercarea pneului aezat oblic pe un stand cu tambur (fig.
3.23.)care nu se rotete nc. Prin aezarea oblic a pneului pe tambur, apare
unghiul de deviere , dar pentru c prile suprafeei de contact, nc nu s-au
deformat , nu poate s apar fora lateral Y. Dac tamburul ncepe s se roteasc,
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 54
atunci poriunile pneului din suprafaa de contact ncep s se deformeze lateral i
apare reaciunea lateral Y (fig. 3.22.). Aceast for lateral atinge dup
aproximativ o rotaie valoarea pe care o cunoatem din curbele forei laterale.
Fig.3.22. Dependena forei laterale de spaiul parcurs
(faza tranzitorie plecarea de pe loc)
Fig.3.23. Schema de incercare a pneului
Acest comportament este exprimat analitic de ecuaia diferenial:
ncrcarea lateral a pneului 55
(
+
t
y
t
l
v
c
Y
k
v
c
t
y
r
s
a
s
d
d
d
d
2 d
d
(3.38)
n care:
c
s
- este constanta elastic a pneului pe direcie transversal;
k
a
- coeficientul de amortizare lateral;
v - viteza;
l - lungimea suprafeei de contact;
y
r
- deplasarea lateral variabil a roii;
Pentru unghiuri de deviere lateral , constante i pentru deplasri laterale
|
|
.
|
\
|
= = 0
d
d
0
t
y
y
r
r
se obine relaia liniar (3.5.) dintre unghiul de deviere i fora
lateral:
=
k
Y (3.39)
Dac pneul se deplaseaz lateral dar n se rostogolete i nu se balanseaz n
acel timp atunci:
t
y
C
t
y
r
s
d
d
d
d
= i
y s
c y = (3.40)
Curba prezentat n figura 3.22., se poate trasa folosind relaia 3.38., dar cu
unghiul de deviere lateral constant =
0
i deplasarea lateral constant
( 0
d
d
=
t
y
r
), adic:
( ) | | t
k
v
c k
Y
s
=
exp 1
0
(3.41)
Produsul k
0
este conform relaiei (3.39) fora lateral Y
0
care apare dup ce
roata s-a deformat elastic complet sub aciunea eforturilor existente, sau dup ce a
intrat n rulare. Procesul de intrare n rulare nu depinde de timp ci de distana
parcurs, deoarece produsul vt=x este drumul parcurs.
Expresia
c k
C
s
= (3.42)
care este reprezentat n figura 3.22 se numete lugimea de intrare. Valoarea
expresiei C nu este independent de mrimea
0
.
n continuare vom analiza fenomenul, pentru cazul cnd unghiul de deviere
lateral variaz sinusoidal:
|
.
|
\
|
=
L
x
a
2 sin (3.43)
n care a
este amplitudinea oscilaiei i L lungimea de und, i s-a considerat
y
r
=constant, deci 0
d
d
=
t
y
r
.
Fora lateral:
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 56
|
.
|
\
|
= x
L
x
a
Y
s
2 sin (3.44)
Deci avem amplitudinea a
s
i intervine defazajul k.
Aa cum se arat n figura 3.24. pentru a
s
=a
( 0 L c ) i k=0, lungimea de
intrare C este mic n raport cu lungimea de und L, i nseamn c se poate folosi
dependena stanionar dintre fora lateral i unghiul de deviere lateral. Dac
raportul L C este mare, fora lateral este consecina micrii devierii laterale fa
de drum.
Fig.3.24. Raportul amplitudinilor i deplasarea x
0,4
8 6 4 2 0,1
0
0,2
1
0,8
0,6
1,0
8 6 4 2 10 2
80
2 4 1 8 6 4 2 0,1
0
40
2 10 6 8
160
120
D
e
p
l
a
s
a
r
e
a
x
R
a
p
o
r
t
u
l
a
m
p
l
i
t
u
d
i
n
i
l
o
r
0,1 18 10 5 0,5 1
2 C/L
<- L
5.60 - 15
a =4,2
c=28,4 cm
l=16 cm
k =1000 daN/rad
4
AUTOPROPULSAREA AUTOMOBILELELOR
n acest capitol se va trata procesul de autopropulsare al autovehiculului, cu
limitare la mersul nainte. Se vor analiza succinct rezistenele la naintare, bilanul
de traciune, viteza maxim, capacitatea de urcare a pantelor i acceleraia
automobilelor.
4.1. Ecuaiile de micare.
Tratarea teoretic se va face pornind de la exemplul unui autoturism care se
deplaseaz pe un drum cu nclinare longitudinal . Figura 4.1.a prezint
autoturismul n ansamblu iar figurile 4.1.b i 4.1.c descompus n componentele sale
eseniale din punct de vedere mecanic. n figura 4.1.d sunt menionate forele ce
acioneaz asupra suprafeei de contact a drumului. Ecuaiile de micare se vor
prezenta pentru primele trei sisteme.
Avnd n vedere c avem de a face cu o problem plan i c forele care
acioneaz asupra roilor din dreapta i a celor din stnga sunt identice, pentru
fiecare sistem sunt trei ecuaii de micare i anume :
= x directia din fortelor
t
x
m
2
2
d
d
= z directia din fortelor
t
z
m
2
2
d
d
= greutate de centrelor axelor jurul n momentelor
t
I
2
2
d
d
Sistemul de coordinate x-z nsoete autoturismul; X fiind orientat n direcia de
mers i Z perpendicular pe aceast direcie.
Analizndu-le pe rnd rezult urmatoarele :
a) pentru suprastructura autoturismului cu greutatea G
as,
masa m
as
i centrul
de greutate c
ga,
cu coordonatele a, b i h
g,
a as as
R F F G
t
x
m + + =
2 1
2
2
sin
d
d
(4.1)
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 58
Dac micrile oscilatorii sunt neglijate atunci
2
2
d
d
t
z
i
2
2
d
d
t
sunt nule i
P a G G G
as R R
+ + = cos 0
2 1
(4.2)
( ) ( ) ( )
cg d g R R R R
a M r h F F b G a G M M + + + + =
2 1
2 1 2 1
0 (4.3)
unde R
a
este rezistena aerului i P este fora portant datorit curentului de aer.
Deoarece rezistena aerului R
a
i fora portant P am considerat c acioneaz n
centrul de greutate al suprastructurii autoturismului este necesar s se introduc i
un moment aerodinamic
cg
a
M
b) Pentru roile punii din fa, cu greutatea
1
R
G i masa
1
R
m , cu momentul de
inerie
1
R
I , dup introducerea distanei a, care ine seama de rezistena la
rulare,
sin
d
d
1 1 1
2
2
1
= r G F X
t
x
m
R
(4.4)
cos 0
1
1 1
= r G G Z
R R
(4.5)
1 1
2
1
2
1 1 1
d
d
a Z r X M
t
I
R d R R
=
(4.6)
c) Pentru roile punii din spate, n mod asemanator
sin
d
d
2 2
2 2
2
2
2
=
r R
G F X
t
x
m (4.7)
cos 0
1 1 2
r R R
G G Z = (4.8)
2 2
2
2
2
2 2 2
d
d
a Z r X M
t
I
R d R R
=
(4.9)
Din aceste nou ecuaii, putem prin nsumare s obinem rezultatele forelor
tangeniale X
1
+X
2
i suma momentelor (antrenare sau franare) ce acioneaz la cele
doua roi. Dac adunm relaiile (4.1), (4.4) si (4.7) obinem :
2 1
2
2
2
2
1
2
2
2
sin ) (
d
d
d
d
d
d
2 1
2 1
X X R G G G
t
x
m
t
x
m
t
x
m
a r r as
R R
s
as
+ + + +
= + +
cu masa total i greutatea total
2 1
R R as a
m m m m + + =
g m G G G G
a r r as a
= + + =
2 1
admind c
2
2
2
2
2
2
1
2
2
2
d
d
d
d
d
d
d
d
t
x
t
x
t
x
t
x
s
= = =
Autopropulsarea automobilelor 59
adic faptul c ntre puni i suprastructur nu apar micri relative de luat n
considerare, se obine suma forelor tangeniale
a a
R
t
x
g
G X X +
(
+ = + sin
d
d 1
2
2
2 1
(4.10)
Fig.4.1. Sistemul autovehicul cale de rulare. Schema de calcul
a)
b)
c)
d)
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 60
Forele (reaciunile) tangeniale rezult, deci din componenta de acceleraie
(fora de inerie)
2
2
2
2
d
d
d
d
t
x
m
t
x
g
G
a
=
, rezistena pantei
sin
a
G
i rezistena
aerului R
a.
Momentele necesare accelerarii autoturismului i pentru nvingerea
rezistenelor menionate rezult din ecuaiile (4.6) si (4.9).
2 1
2
2
2
2
1
2
2 1
2 1 2 1 2 1
d
d
d
d
) ( a Z a Z
t
I
t
I r X X M M
R R R R d R R
+ + + + + = +
(4.11)
Dac se ine seama de relaia (4.10) i de faptul c rezistena la rulare este
definit prin expresia (vezi capitolul 1)
r
d
R R
R
r
a Z a Z
=
+
2 1
2 1
(4.12)
i reprezint suma rezistenelor la rulare a tuturor roilor autoturismului, atunci este
valabil relaia :
2
2
2
2
1
2
2
2
d
d
d
d
sin
d
d 1
2 1 2 1
t r
I
t r
I
R R
t
x
g
G
r
M M
d
R
d
R
r a a
d
R R
+ + + +
(
+ =
+
Dac se ine seama de corelaia dintre acceleraia din micarea de translaie i
cea din micarea de rotaie
2
2
2
2
1
2
2
2
d
d
d
d
d
d
2 1
t
r
t
r
t
x
r r
= =
i cu condiia c razele de rulare
r r r
r r r = =
2 1
sunt egale si constante, rezult:
r a a
r d
R
r d
R
a
d
R R
R R G
t
x
r r
I
r r
I
g
G
r
M M
+ + +
(
(
+ + =
+
sin
d
d
2
2
2
2
1
1 2 1
(4.13)
ntre relaia (4.13) i relaia (4.10) exist deosebirea :
n ecuaia (4.13) la componenta acceleraiei se adaug i componentele
micrii de rotaie
1
R
I
si
2
R
I
, iar rezistena la rulare R
r,
apare distinct
pentru c n relaia (4.10), aceasta este cuprins n suma (X
1
+X
2
).
4.2. Rezistenele rezultate din micarea autoturismelor
Dup cum se tie, rezistenele care se produc din interaciunea dintre
automobile i mediul n care se deplaseaz sunt : rezistena la rulare a roilor (R
r
),
rezistena pantei (R
p
) si rezistena aerului (R
a
). Rezistena datorat forelor de
inerie intervine n perioadele de accelerare din care cauz se numete rezisten la
accelerare sau la demarare (R
d
).
Autopropulsarea automobilelor 61
Relaiile cu care se calculeaz rezistenele la naintare a automobilelor sunt
urmatoarele :
rezistena la rulare R
r
=f G
a
cos f G
a
rezistenta pantei
ap a p
G G R = sin
rezistena aerului
2 2
2
1
V A K V A c R
x a
= =
rezistena la demarare
t
v
g
G
t
x
g
G
R
a a
d
d
d
d
d
2
2
= =
Fig.4.2. Rezistenele la naintarea autovehiculului
innd seama de cele artate mai sus i de faptul c suma momentelor ce
acioneaz la roi este :
2 1
R R R
M M M + =
(4.14)
relaia (4.13) devine :
2
2
2
2
1
d
d 1
V A c f p
t
x
g
G
r
M
X a
d
R
+
(
+ + =
(4.15)
n care r
d
este raza dinamic a roilor, - coeficientul influenei maselor n
micarea de rotaie, - densitatea aerului, c
x
- coeficientul de rezisten a aerului, A-
aria seciunii transversale a autoturismului, p- panta n procente, f- coeficientul de
rezisten la rulare, G
a
- greutatea total a autoturismului, V- viteza de deplasare.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 62
Dup cum se observ din relaia (4.15) rezistena total ce se opune deplasrii
autoturismului este format din dou pari; una independent de viteza de deplasare
(R
r
,R
p
,si R
d
) i una - rezistena aerului- care crete cu ptratul vitezei de deplasare
(figura 4.2).
Afirmaia c prima parte a relaiei (4.15) este independent de viteza de
deplasare nu este valabil i la deplasarea autoturismului cu viteze mari, deoarece
att rezistena la rulare ct i uneori chiar rezistena pantei la anumite valori ale
vitezei de deplasare se mresc. Cu toate acestea pentru simplificare se consider
valabil expresia :
2
bv a
r
M
d
R
+ =
(4.16)
n relaia (4.16), elementul b nu cuprinde numai rezistena aerului ci i acea
component a rezistenei la rulare, care crete cu ptratul vitezei de deplasare.
Uneori, se mai introduce i un element liniar, care cuprinde o parte a
rezistenei la rulare, corespunztor relaiei (
r
d
R
R
r
M
=
) i n aceast situaie se
obine :
2
bv cv a
r
M
d
R
+ + =
Cu toate acestea se va utiliza relaia (4.15), cu precizarea c ori de cate ori este
necesar, s se in seama de faptul c rezistena la rulare nu este independent de
viteza de deplasare a autoturismului.
Cele dou pri ale relaiei (4.15) se deosebesc ntre ele i prin aceea c, n
toate cazurile partea independent de vitez este proporional cu greutatea, n timp
ce rezistena aerului este independent de greutate.
Expresia M
R
mparit la r
d
are dimensiunea unei fore i se numete for la
roat F
R
, deci :
2
2
2
2
1
d
d
Av c
t
x
g
p f G R R R R
r
M
F
x a a d p r
d
R
R
+
(
+ + = + + + = =
(4.17)
Trebuie avut n vedere faptul c fora la roat F
R
nu reprezint suma
reaciunilor tangeniale la roi, ci este o expresie de calcul, ca raport ntre
d
r
r
M
.
Din punct de vedere analitic acest lucru se poate observa prin introducerea relaiei
(4.10) n relaia (4.13),
r
r d
R
r d
R
d
R R
d
R
R
R
t
x
r r
I
r r
I
X X
r
M M
r
M
F +
(
(
+ + + =
+
= =
2
2
2 1
d
d
2 1 2 1
(4.18)
Puterea necesar la roile autoturismului reprezint suma momentelor la roi
nmulit cu vitezele unghiulare ale acestora, deci :
Autopropulsarea automobilelor 63
t
M
t
M P
R R R
d
d
d
d
2 1
2 1
+ =
(4.19)
Dac, n locul vitezelor unghiulare
t d
d
1
si
t d
2 d
se introduce viteza de
tranlaie v
t
x
=
d
d
ce ine seama i de alunecarea roilor, se obine :
t
r
t
r v
t
x
r r
d
d
d
d
d
d
2 1
2 1
+ = =
(4.20)
i puterea
v
r
M
r
M
P
r
R
r
R
R
|
|
.
|
\
|
+ =
2
2
1
1
(4.21)
n cazul cnd avem o singur punte motoare, ecuaia (4.19) devine
t
M P
R R
d
d
=
(4.22)
iar relaia (4.20) devine :
t
r v
t
x
r
d
d
d
d
= =
(4.23)
Particulariznd expresia (4.21) la cazul unei singure puni motoare i inmulim
i mprim cu raza dinamic a roilor motoare r
d
obinem
v F
r
r
v
r
M
r
r
P
R
r
d
d
R
r
d
R
= =
(4.24)
Dac se ine seama de alunecarea dintre roi i calea de rulare, exprimat de
relaia (1.19) capitolul 1- se obine:
a
v F P
R R
=
1
1
(4.25)
n continuare vom ine seama i de rezistenele la naintare, respectiv vom
introduce n relaia (4.25) relaia (4.17)
| |
(
(
+
|
|
.
|
\
|
+ +
= + + +
=
3
2
2
2
1
d
d
1
1
1
1
v A c v
t
x
g
p f G
a
v R R R R
a
P
x a a d p r R
(4.26)
De multe ori, se neglijeaz alunecarea i puterea la roile motoare se
calculeaz cu expresia :
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 64
3
2
2
2
1
d
d
v A c v
t
x
g
p f G v F v
r
M
P
x a R
d
R
R
+
|
|
.
|
\
|
+ + =
(4.27)
Dependena dintre puterea necesar la roile autoturismului i puterile
rezistente este prezentat n figura 4.3. Din figur rezult c puterea pentru
nvingerea rezistenei la rulare, la pant i demarare cresc proporional cu viteza
autoturismului, n schimb puterea necesar pentru nvingerea rezistenei aerului
creste cu viteza a 3-a a vitezei de deplasare.
n realitate, din cauza alunecrii, puterea necesar la roile motoare este mai
mare aa cum se vede i n figura 4.4, mai ales la vitezele de deplasare mai mici,
deoarece la aceste viteze apar reaciunile tangeniale cele mai mari.
Analiza facut s-a referit la autovehiculele cu doua puni ex. cazul
autoturismelor. Relaiile care exprim rezistenele la naintare sunt ns valabile i
pentru autovehiculele cu mai multe puni, cu maini sau utilaje tractate,
autovehicule cu remorca sau semiremorc.
Dac ne referim la relaia (4.17)
2
2
2
2
1
d
d
v A c
t
x
g
p f G
r
M
x a
d
R
+
(
+ + =
Fig.4.3.Puterea necesar pentru
nvingerea rezistenelor la naintare
Fig.4.4. Influnea alunecrii dintre
penu i calea de rualare asupra
puterii necesare pentru nvingerea
rezistenelor la naintare
Autopropulsarea automobilelor 65
atunci greutatea G
a
va cuprinde greutatea ntregului autovehicul iar coeficientul
va trebui s in seama de influena tuturor maselor n micare de rotaie, respectiv
i a celor care se adaug .
Deasemenea coeficientul de rezisten la rulare f, care poate sa nu fie identic
pentru toate roile este necesar s fie corectat n mod corespunzator. La fel se poate
proceda i cu coeficientul de rezisten a aerului care se modific odat cu
prezena mainilor tractate.
5
CARACTERISTICILE MOTOARELOR
FOLOSITE LA ANTRENAREA AUTOMOBILELOR
I CONLUCRAREA ACESTORA CU TRANSMISIA
Dup ce se cunosc momentele i puterile necesare pentru nvingerea
rezistenelor la naintare se va studia n continuare oferta de momente i puteri ale
motoarelor care echipeaz automobilele respective. Dependena momentelor i
puterilor necesare nvingerii rezistenelor la naintare, de viteza de deplasare o
numim caracteristica necesaruluii dependenei momentelor i a puterilor oferite
de motorul de antrenare, de vitez o numim caracteristica furnizat.
5.1. Motoare cu caracteristica ideal (P=constant)
n figurile (4.2) i (4.3) s-a prezentat caracteristica necesarului pentru un
autovehicul oarecare, unde, dup cum se poate observa apare un cmp de
caracteristici. Pentru ca soferul s poat acoperi cu autovehiculul pe care-l conduce
acest cmp de caracteristic a necesarului, trebuie ca sursa de antrenare motorul
ce echipeaz autovehiculul s furnizeze de asemenea un cmp de caracteristica
furnizat pe masura celei necesare.
n figura 5.1 este prezentat caracteristica limitat de puterea constant a
motorului P
max
( ) [ ] ( ) [ ] f M b si n f P a = =
Fig. 5.1.Caracteristica limitat de puterea constant a motorului
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 66
Dac motorul ar putea debita aceast putere maxim P
max
la orice turaie
(fig.5.1.a), motorul are o caracteristic ideal. Momentul conform figurii 5.1.b este
n
P
M
max
,respectiv
max
P n M
=constant (5.1)
iar caracteristica M=M(n) este o hiperbol echilater i reprezint caracteristica
ideal. Funcionarea motorului cu caracteristica ideal este ntotdeauna stabil,
deoarece odat cu reducerea turaiei crete momentul. Autovehiculul echipat cu
asemenea motor ar putea funciona cu o transmisie fr cutie de vitez.
Linia P
max
nu este trasat n figura 5.1a pn la n=0, ntruct, conform relaiei
(5.1) aceasta ar nsemna un moment infinit ceea ce este lipsit de sens. Momentul
maxim posibil este funcie de aderena dintre roat i calea de rulare. Momentul la
roat determinat n cadrul capitolului 1 se calculeaz cu relaia:
( )
2
2
d
d
t
I r R X M
R d r R
+ + = (5.2)
Valoarea maxim a momentului se obine atunci cnd reaciunea tangenial
atinge valoarea maxim posibil limitat de aderen
( )
2
2
max
d
d
max
t
I r R X M
R d r R
+ + = (5.3)
n care
Z X =
max
(5.4)
Dac se neglijeaz momentul de inerie i rezisten la rulare i se ine seama
de relaia (5.4), relaia (5.3) devine:
d R
r Z M
max
(5.5)
respectiv
n r Z n M P
d R R
max
(5.6)
Dac se consider coeficientul de aderen () ca fiind independent de viteza
de deplasare i deci independent i de turaia n, atunci se obine caracteristica din
figura 5.2 (linie continu).
Fig.5.2. Caracteristica limitat de aderen
P
n
M
n
=f(v)
=const
Caracteristicile motoarelor folosite la antrenarea automobilelor 67
Dac se ine seama de faptul c mrirea vitezei determin o reducere a
coeficientului de aderen, atunci caracteristica devine regresiv (linie ntrerupt n
figura (5.2)) Aceste limite nu trebuie depite, deoarece n caz contrar roile
motoare se vor roti fr s se deplaseze (patineaz). Caracteristicile prezentate n
figurile (5.1) i (5.2) numite caracteristici ideale, limiteaz cmpul caracteristicii
furnizate n mod ideal. n figura 5.3 este reprezentat caracteristica furnizat
ideal limitat pe o parte de ctre aderena dintre roi i calea de rulare (prin M
max
)
i de ctre viteza maxim a automobilului (prin n
max
). Limita turaiei maxime poate
fi dat fie de caracteristicile motorului fie de viteza maxim a automobilului.
Fig.5.3. Caracteristica furnizat ideal
5.2 Caracteristicile motoarelor folosite la automobile
Se vor prezenta n continuare printr-o comparaie principial caracteristicile
motoarelor care se folosesc-ntr-o msur mai mare sau mai mic-pentru antrenarea
automobilelor.
5.2.1 Motorul cu abur
Cea mai apropiat caracteristic de cea ideal se obine de motorul cu abur
(fig.5.4), care a avut o larg utilizare la primele autovehicule, ns mai tarziu a fost
nlocuit cu motorul cu ardere intern, mai economic i mai compact. Punctele de
regim din interiorul limitelor (putere, moment i turaie) se obin prin modificarea
debitului de
abur Z. Dac debitul de aburi n cilindri este constant i dac se consider c
randamentul nu depinde de vitez, atunci produsul Mnconstant. Prin urmare
caracteristica motorului cu abur M=M(n) este aproximativ hiperbolic, apropiindu-
se de cea ideal. Principalele dezavantaje ale motorului cu abur constau n
P
n n
M
antrenare
max
P
max
l
i
m
i
t
a
v
m
a
x
l
i
m
i
t
a
d
e
a
d
e
r
e
n
t
a
max
antrenare
limita de aderenta
M
max
l
i
m
i
t
a
v
m
a
x
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 68
randament sczut i greutate mare. Dar, avnd n vedere c pe plan mondial se
caut noi surse de energie, care s le nlocuiasc pe cele consumatoare de petrol,
este posibil ca motorul cu abur-mai perfecionat s reintre n competiie, pentru a fi
utilizat pe autovehicule.
Fig.5.4. Caracteristica motorului cu abur
5.2.2.Motorul electric
Apropiat de construcia ideal este i caracteristica motoarelor electrice.
Caracteristica acestor motoare depinde de curentul intrebuinat i de modul de
legare a nfurrii rotorului i excitaiei. Din acest punct de vedere caracteristica
cea mai potrivit se obine la motorul electric de curent continuu cu excitaie n
serie (fig.5.5).
Fig.5.5. Caracteristica motorului electric de curent continuu cu excitaie n serie
p n/n
max
0
0,5
1,0
P/P
0,5
1,0
0
1,0
2,0
max
M/M
0,5
1,0
n/np
Caracteristicile motoarelor folosite la antrenarea automobilelor 69
Caracteristica de putere i caracteristica de moment ale unui motor de curent
alternativ cu excitaia n serie sunt artate n figura 5.6.
Fig.5.6. Caracteristica unui motor de curent alternativ cu excitaia n serie
Din graficele prezentate se observa c variaia momentului se apropie mai mult
de caracteristica ideal dect caracteristica puterilor; aceasta din cauza faptului c
puterea maxim nu rmne constant pe ntregul domeniu de turaie. n diagramele
menionate au fost specificate trei valori maxime-respectiv caracteristici i anume:
puterea continu, puterea de demarare i puterea orar. n toate cazurile la care ne
referim, puterile de demarare i putrile orare sunt mai mari dect puterile continue,
dar puterile de demarare i orare sunt limitate n timp din cauza supranclzirii
motoarelor respective.
Pe de alt parte, tocmai posibilitatea debitrii de ctre motoarele electrice a
unor puteri mari pentru perioade de timp limitate, a stat la baza utilizrii motoarelor
electrice la aotovehiculele pe ine, deoarece le confer acceleraii mari i o
capacitate mrit de urcare a pantelor.
Punctele de regim din interiorul cmpului caracteristicii, se vor realiza prin
urmtoarele forme de comand electric:
a)-Prin modificarea tensiunii de alimentare a motorului (figura 5.7.a). La motoarele
de current continuu, modificarea tensiunii se face prin excitaie n serie, iar la
motoarele de curent alternativ cu ajutorul transformatorului n trepte. Se folosesc
din ce n ce mai mult-att pentru motoarele de curent continuu ct i pentru cele de
curent alternativ-sisteme electronice de comand care nlocuiesc rezistenele n
serie i transformatoarele comutabile.
b)-Prin modificarea conexiunii motoarelor: adic comutarea de pe conexiunea de
serie pe cea n paralel i invers (figura 5.7.b). Acest lucru este posibil, numai atunci
p p
0
0,5
1,0
n/n
0
0,5
1,0
n/n
M/M
1,0
0,5
P/P
max
2,0
1,0
max
puterea de demarare (max. 5 min.)
puterea orara
puterea continua
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 70
cnd automobilul este dotat cu mai multe motoare i se folosete numai la
motoarele de curent continuu.
c)-Prin reducerea cmpului caracteristicilor (fig.5.7.c) de ctre gradul de excitatie
si se utilizeaza la motoare de curent continuu.
Fig.5.7. Stabilirea regimului de funcionare a motorului electric
5.2.3. Motorul cu ardere intern
Din analiza succint fcut asupra caracteristicilor motoarelor ce se pot folosi
la autovehicule, rezult c din punctul de vedere al caracteristicilor, cele mai puin
indicate ar fi motoarele cu ardere intern cu piston avnd n vedere calitile de
traciune mai reduse (fig.5.8) este artat caracteristica de putere i caracteristica de
moment ale unui motor cu aprindere prin scanteie. Dup cum se vede n opoziie cu
cerina conform creia puterea trebuie s fie constant ntr-un domeniu de turaie
ct mai larg, la motorul cu combustie intern momentul este aproximativ constant
n timp ce puterea scade pronunat cu ct ne apropiem de turaiile joase. n acelai
timp motoarele cu ardere intern, realizeaz un moment ncepnd numai de la o
anumit turaie; fenomen numit gol de turaie-gol de moment sau gol de putere.
Fig.5.8. Caracteristica motorului cu ardere intern cu piston
n
M
M
max
n
M
max
M
M M M M
M
n
continua
orara
demarare
excitatie 50%
excitatie 100%
n/n
0
0,5 1,0
0
n/np
0,5 1,0
1,0
0,5
max
P/P
2,0
1,0
M/M
max
p
Caracteristicile motoarelor folosite la antrenarea automobilelor 71
Motorul cu turbin cu gaze prezint o caracteristic de cretere a momentului
la reducerea turaiei dei nu este apropiat de cea ideal. n figura 5.9 se arat
caracteristica de putere i de moment ale unei turbine cu gaz, ntr-un montaj cu doi
arbori (montajul cu un singur arbore nu este utilizabil pentru antrenarea
automobilelor din cauza caracteristicii de sarcin neavantajoas). Dup cum se
observ, nu ntlnim goluri de genul celor menionate la motorul cu ardere
intern cu piston (m.a.s.) i acest motor debiteaz moment la turaie foarte joas
(n=0), moment ce se reduce aproximativ liniar, odat cu creterea turaiei. Pentru
un regim din interiorul cmpului caracteristicilor se realizeaz prin comanda
cantitilor de carburant i prin reglarea cantitatii de abur necesar arderii.
Fig.5.9. Caracteristica motorului cu turbin cu gaze
5.3. Gradul de utilizare a diverselor tipuri de motoare la antrenarea
automobilelor
Dup ce am vazut care sunt caracteristicile diferitelor categorii de motoare, n
cele ce urmeaz se va analiza n ce masur acestea sunt utilizabile pentru
propulsarea automobilelor.
n figura 5.10 este reprezentat cmpul de caracteristici necesare unui
automobil cu transmisie mecanic peste care sunt suprapuse caracteristicile
furnizate ale diferitelor categorii de motoare pentru aceeai vitez maxim.
Ca parametru s-a ales panta (p%), care atunci se neglijeaz influena maselor
n micare de rotaie, constituie i o msur pentru capacitatea de accelerare. Mai
n/n
0
0,5
1,0
0
p
1,0
0,5
n/np
1,0
0,5
P/P
max
2,0
1,0
M/M
max
V T1 T2
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 72
sunt prezentate n figura 5.11
caracteristicile furnizate ale motorului
cu abur, motorului electric de curent
alternativ (cu curbele de putere
continu, putere orar i de
demarare), ale turbinei cu gaz i ale
motorului cu ardere intern.
Pentru trasarea curbelor din figura
5.11 s-a avut n vedere respectarea
urmtoarelor condiii:
Motoarele la care se refer curbele
trebuie s ating aceeai vitez
maxim (V
max
=40m/s)
Motorul cu abur i motorul
electric de curent alternativ pot depi
sensibil turaia n
P,
pstrnd totodata
puterea maxim P
max;
acest lucru nu
este posibil la motorul cu ardere
intern i la turbine cu gaz. Din
figurile 5.4,5.5 i 5.6 rezult c viteza
maxim se obine la turaii ale
motorului mult mai mari dect
turaiile de putere maxim n
P,
astfel:
la motorul cu abur
p V
n n = 4 , 1
max
la motorul electric de curent alternativ
p V
n n = 4 , 1
max
(puterea orar)
la turbine cu gaz
p V
n n =
max
c) Greutatea total a motoarelor analizate trebuie s aib aceeai mrime,
pentru ca greutatea total a automobilului sa rmn constant Ga=1000 daN.
Figura 5.11 arata faptul c motorul cu aburi i motorul electric de curent
alternativ acoper n bune condiiuni cmpul de caracteristici necesare. Cu
automobilul antrenat de motorul cu abur se poate urca o pant de peste 30%, cu cel
antrenat de un motor electric o pant cu puin sub 30 %, iar pentru cel mult o or i
o pant de peste 30 %. n schimb, cu automobilul antrenat cu turbina cu gaz se
poate urca chiar si la o vitez foarte mic, o pant de mai puin de 20%, iar
automobilul echipat cu un motor cu ardere intern nu poate invinge o pant de nici
10%.
Pentru antrenarea electric, curba puterii de demarare ne arat existena unei
rezerve de putere destul de mare, pentru urcarea unei pante (pentru un timp limitat)
sau pentru accelerarea mersului automobilului respectiv.
0
200
100
20 10 30
300
400
500
600
40
puterea de demarare
motor electric de curent alternativ
motor cu aburi
puterea orara
puterea continua
turbina cu gaz
motor cu ardere interna
panta 0%
panta 5%
panta 10%
panta 20%
panta 30%
R
F [daN]
v [m/s]
Fig.5.10. Cmpul de caracteristici
necesare unui automobil cu transmisie
Caracteristicile motoarelor folosite la antrenarea automobilelor 73
Din curbele prezentate in figura 5.10 rezult c motoarele cu abur i electric
de curent alternativ trifazat, sunt superioare turbinei cu gaz i motorului cu ardere
intern cu piston; dar asupra acestei concluzii va trebui s se mai discute deoarece
nu este ntrutotul exact.
Este adevarat, c viteza maxim a automobilelor echipate cu diverse tipuri de
motoare este identic, dar puterea maxim s-a obinut la turaii diferite. La turbine
cu gaz i motoarele cu ardere intern, puterea maxim se obine la turaia de vitez
maxim, iar la motorul cu abur i motorul electric de curent alternativ, aceast
putere maxim se obine la o turaie mai joas.
Raportul dintre puterile maxime ale diferitelor tipuri de motoare folosite la
automobile, reprezentate in figura 5.10 este:
-motorul cu ardere intern i turbine cu gaz P
max
=1
-motorul cu abur P
max
=1,04
-motorul electric
-puterea continu P
max
=1,62
-puterea orar P
max
=1,78
-puterea de demarare P
max
=2,70
Deducem din cele de mai sus,
faptul c motoarele cu ardere intern
i mainile cu aburi prezint aceeai
valoare a puterii maxime, dar din
punctul de vedere al caracteristicilor
motorul cu abur este superior
motorului cu combustie intern. n
figura 5.11 se poate compara
caracteristicile motoarelor cu ardere
intern cu caracterisicile motorului
electric, dar n acest caz trebuie ca
puterea maxim a turbinei cu gaz i
cea a motorului cu ardere intern s
fie egal cu puterea maxim continu
a motorului electric de curent
alternativ.
Vedem faptul c, motorul cu
ardere intern este inferior motorului
electric, dar turbina cu gaz este mai
bun apropiindu-se de motorul
electric de curent alternativ, trifazat
dac comparaia se face ntre puterea
maxim continu; dac comparaia se
face cu puterile orare i cele de
demarare, atunci turbina cu gaz se
v [m/s]
puterea continu
panta 0%
10
0
20 30
200
100
panta 5%
panta 10%
panta 20%
300
panta 30% puterea orara
40
motor electric de curent alternativ
motor cu aburi
400
500
R
F [daN]
600
puterea de demarare
motor cu ardere interna
turbina cu gaz
Fig.5.11.Caracteristicile comparative
ale diferitelor tipuri de motoare
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 74
dovedete a fi inferioar. Pe baza acestor consideraii se poate concluziona
urmtoarele:
1. Motoarele cu abur i motoarele electrice sunt din punctul de vedere al
caracteristicilor mult mai potrivite pentru antrenarea automobilelor dect
motoarele cu ardere intern.
2. Prin dimensionarea corespunzatoare i prin posibilitile de a debita puteri
mai ridicate se pot optimiza caracteristicile neavantajoase ale motoarelor
cu ardere intern; acest procedeu nu are ns aplicabilitate practic.
Compararea dintre motoarele folosite de automobile s-a fcut numai sub
aspectul caracteristicilor, deoarece n aceast faz a prezentrii acest aspect ne-a
interesat. Alte proprieti sunt ns la fel de importante sau poate superioare
caracteristicilor. Asfel, folosirea motoarelor cu ardere intern la automobile s-a
impus-n ciuda caracteristicilor mai puin avantajoase pentru motivul c se
dovedesc superioare ca pre, volum si greutatea prorpie; ca asigurarea rezervei
necesare de combustibil este ceva mai simplu de rezolvat i c se poate face mai
uor pe traseu.
5.4. Motorul cu ardere intern
n acest paragraf, se vor analiza caracteristicile motorului cu ardere intern
care dup cum s-a vzut sunt cele mai
utilizate pentru antrenarea automobilelor.
Un parametru caracteristic l
constituie raportul dintre puterea maxim
i capacitatea cilindric a motorului
respectiv (P
max
/V
h
).
n figura 5.12 este artat
dependena raportului (P
max
/V
h
) de turaia
corespunztoare puterii maxime a
motorului n
P,
unde se vede c odat cu
creterea turaiei n
P
raportul se mrete.
n diagrama din figura 5.12 mai sunt
nscrise i valorile medii ale presiunii
efective pe piston (p
e
), dar creterea
raportului (P
max
/V
h
) se datoreaz n mai
mic msur-(i la turaiile mai mari)-
acestui parametru.
Variaia momentului motorului n
funcie de turaie, in judecarea gradului
de aplicabilitate al motoarelor pentru
antrenarea automobilelor, se
9
0
3 5 7
n 10 [rot/min]
40
20
60
80
100
120
140
2 4 6 8 10
14
13
12
11
10
9
8
7
valoarea medie pentru diferite m.a.c.
valoarea medie pentru diferite m.a.s.
pme [daN/cm]
Pmax h /v [CP/l]
Fig.5.12 Dependena raportului
(P
max
/V
h
) de turaia de puterei maxime
Caracteristicile motoarelor folosite la antrenarea automobilelor 75
caracterizeaz prin M
P
-momentul corespunztor puterii maxime si prin turaia
acestuia n
P
i prin M
max
-momentul maxim al motorului si turaia corespunztoare
n
M
(fig.5.13).
Fig.5.13. Caracteristica de moment a motoarelor cu ardere intern
Tabelul 5.1
Tipul
motorului
Tipul automobilului
M
max
/M
P
n
p
/n
M
Autoturisme 1,18 1,81
M.A.S.
Automobile sport 1,14 1,50
M.A.C. Autocamioane 1,11 1,63
In tabelul 5.1 sunt redate valorile medii ale raporturilor acestor momente si
turaii pentru un numr de 40 de autoturisme, 20 de automobile sport si 45 de
autocamioane.
Corelaia dintre mrimile date in tabelul 5.1 este prezentat grafic in figurile
5.14,5.15 i 5.16. Ne
amintim c raportul
M
max
/M
P
s-a montat cu c
a
si
se numete coeficient de
adaptabilitate i raportul
n
P
/n
M
-reprezint inversul
coeficientului de elasticitate
c
e
(c
e
=n
m
/n
P
). O legatur de
interdependen ntre
coeficientul de
adaptabilitate c
a
i inversul
M
n
M
M
M
min
P
max
n n n
min
P
max M
n
Fig.5.14.Performanele automobilelor fabricate
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 76
coeficientului de elasticitate 1/c
e,
exist dar ntr-o msur destul de redus
(fig.5.14). n schimb,
exist o mai bun
corelaie ntre raportul de
momente-deci ntre
coeficientul de
adaptabilitate i raportul
de putere maxim/
capacitate cilindric aa
cum arat in figura 5.15.
Deducem de aici c:cu ct
raportul (P
max
/V
h
) este mai
mare crete influena
turaiei de putere maxim
n
P.
Nici corelaia dintre
raportul turaiilor (n
P
/n
M
)
i raportul dintre puterea maxim i capacitatea cilindric (P
max
/V
h
) nu iese prea
mult n eviden (fig.5.16). Se poate totui meniona faptul c odat cu creterea
puterii debitate specifice, turaiile corespunztoare momentului maxim se apropie
mai mult de turaia puterii maxime.
n figura 5.13 mai
este evideniat un punct,
caracterizat de momentul
motor minim M
min
(M
0
) i
turaia corespunztoare n
0.
Acest punct, situat pe curba
de sarcin total nu trebuie
confundat cu punctul de
mers n gol, la care turaia
este mai mic. Tot pe curba
de sarcin total din figura
5.13 este desenat i
punctual care semnific
turaia maxim a
motorului. Pentru aceste
dou puncte sunt specificate n tabelul 5.2 cteva valori orientative de o precizie
mai redus
Tabelul 5.2
Tipul
motorului
n
max
/n
p
M
min
/M
max
n
max
/n
o
M.A.S. 1,101,20 0,9 4
80 50 40 30 70
60
100 90 110
max
1,3
1,1
1,0
1,2
M
1,4
autoturisme
autoturisme sport
/M
P
np=6000 rot/min
np=5500 rot/min
np=5000 rot/min
/v
max
P [CP/l]
h
Fig.5.15.Performanele automobilelor fabricate
Fig.5.16.Performanele automobilelor fabricate
Caracteristicile motoarelor folosite la antrenarea automobilelor 77
M.A.C. 1,0 limitat de regulator 0,9 3
5.5. Convertizoare de traciune
Comparaia fcut ntre caracteristica ideal furnizat i caracteristicile reale
ale diferitelor motoare demonstreaz c, unele din aceste motoare se apropie de
ideal n timp ce altele, cum sunt motoarele cu ardere intern i turbine cu gaz par la
prima vedere total nepotrivite.
Avnd n vedere faptul c, motoarele nepotrivite din punct de vedere al
caracteristicilor, ofer alte avantaje (raport corespunztor dintre P
max
/V
h
) apare
necesitatea unei convertiri a caracteristicii de traciune, n aa fel nct cea
obinut prin convertire s se apropie ct mai mult de caracteristica ideal de
traciune. Aceast convertire trebuie s ndeplineasc pentru motorul cu ardere
intern urmtoarele condiii:
Golul dintre turaia zero i turaia minim trebuie s fie nchis, pentru a se
putea efectua pornirea de pe loc a automobilului;
Variaia puterii i a momentului trebuie s se modifice n aa fel nct s se
apropie de variaia caracteristicii ideale;
Fig.5.17.Convertizorul de traciune Fig.5.18.Convertizorul de turaie
n figura 5.17 este reprezentat ntr-o schem-bloc funcia ndeplinit de ctre
un convertizor de caracteristic de traciune. Se introduce la intrare puterea P
E,
momentul M
E
i turaia n
E,
iar la ieire se obin valorile de ieire corespunztoare.
Convertizorul nu lucreaz fr pierderi, astfel nct pentru un randament
t
apare o putere pierdut de mrimea (1-
t
)P
E.
Corespunztor celor dou condiii subliniate mai sus, se face deosebire ntre:
Convertizorul de turaie-denumit ambreiaj-cu caracteristica
M
E
=M
A
i n
E
n
A
Convertizorul de cuplu(moment)-care este de cele mai multe ori o transmisie
mecanic, de exemplu o cutie de vitez combinat cu o transmisie cardanic, i are
caracteristica:
M
E
M
A
i, concomitent n
E
n
A
convertizor de
tractiune
Intrare Iesire
P
M
n
E
E
E A
n
A
A
M
P = P
E
(1- )P
t
t
E A E
(1- )P
turatie
convertizor de
n
E
E
M
E t
A
A
M =M
n
Intrare
P P
Iesire
E
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 78
In paragrafele urmtoare, vom face o privire de ansamblu asupra celor dou
tipuri de convertizoare, pe care automobilele cu traciune mecanic le folosesc de
cele mai multe ori combinate.
5.6. Convertizorul de turaie
Figura 5.18 reprezint schema bloc a unui convertizor de turaie, schem ce
este identic cu cea din figura 5.17 cu excepia relaiei:
A E
M M = (5.7)
O constatare mai general, valabil pentru toate convertizoarele de turaie se
refer la randament().Valorile pentru putere rezult din:
-putere de intrare
E E E
n M P
-putere de ieire
A A A
n M P
iar randamentul
E
A
E
A
t
n
n
P
P
= = (5.8)
Dependena dintre raportul momentelor (M
A
/M
E
) i al randamentului n funcie
de raportul turaiilor (n
A
/n
E
) se poate vedea n figura 5.19. Raportul M
A
/M
E
este
constant, randamentul
t
crete liniar cu raportul turaiilor n
A
/n
E
, devenind egal cu
unitatea pentru n
A
=n
E.
Puterea pierdut, transformat n cldur i care trebuie evacuat prin mijloace
potrivite pentru a evita supranclzirea local este e:
( )
E E
E
A
E t A E
P s P
n
n
P P P =
= = 1 1 (5.9)
n care s reprezint alunecarea definit dup cum urmeaz
t
E
A E
E
A
n
n n
n
n
s =
= = 1 1 (5.10)
respectiv diferena dintre turaia de intrare si
turaia de ieire, raportat la turaia de intrare.
Dac se produce alunecarea, atunci aa
cum demonstrez relaia (5.9) se produce i
cldur. Cantitatea de cldur n unitatea de
timp t este:
( )
= =
t t
E A E
t s P t P P Q
0 0
d d (5.11)
deci suprafaa de sub curba P
Es
din figura 5.20.
Din punct de vedere al cantitii de cldur Q
se deosebesc n principiu dou feluri de
M /M A E
1-
t
t
n /n
E A
Fig.5.19. Randamentul
Caracteristicile motoarelor folosite la antrenarea automobilelor 79
convertizoare de turaie i anume:
cele care nu pot prelua
dect o cantitate de
cldur limitat i la
care conversia de turaie
trebuie s fie limitat n
timp (cazul
ambreiajelor cu
friciune).
b) cele la care cantitatea
de cldur produs fiind
absorbit de un mediu
de rcire, limitarea n
timp a conversiei de
turaie nu este necesar
(cazul ambreiajelor
hidrodinamice).
Fig.5.21. nchiderea golului de turaie cu ajutorul ambreiajului
Fig.5.22. Procesul de ambreiere. Variaia puterii n timpul cuplrii ambreiajului
t
P
p
u
t
e
r
e
a
p
i
e
r
d
u
t
a
ES
Q
Fig.5.20. Puterea pierdut prin cldur
n
E
M
n /n
A
M /M
n
A
M
E
E A E A
n'
E
n'
E
1
1
E
n
E
P
E n /n A
A
n /n
E
n
A
P
A
n'
E
n'
E
1
1
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 80
n figura 5.21 se arat modalitatea de a nchide golul de turaie a motorului cu
ajutorul ambreiajului. S presupunem c n timpul ambreierii motorul poate fi
meninut n punctul c de pe curba sarcinii totale; n aceasta situaie pe partea de
ieire se debiteaz un moment de mrime identic, la o turaie de ieire diferit de
turaia de intrare pn n momentul n care se produce deplasarea pornirii
automobilului; dup care apare identitatea n
A
=n
E
.=n
E.
n figura 5.22, ambreierea
este reprezentat prin curbele de putere.
5.7. Convertizorul de cuplu
Pentru convertizorul de cuplu este valabil schema-bloc artat n figura 5.17.
Valorile caracteristice sunt:
-puterea de intrare
E E E
n M P =
(5.12)
-puterea de ieire
A A A
n M P = (5.13)
-randamentul
E E
A A
E
A
t
n M
n M
P
P
= = (5.14)
Din aceste relaii rezult raportul momentelor:
A
E
t
E
A
n
n
M
M
= (5.15)
Pornind de la ecuaia (5.15) se face deosebirea dintre dou feluri de
convertizoare de cuplu i anume:
Convertizoarele de cuplu cu un raport fix, aa numitele transmisii n trepte,
cele mai multe realizate sub forma unor angrenaje cu roi dinate, comutabile prin
roi sau blocuri baladoare, cu mai multe rapoarte fixe de transmitere numite cutii
de viteza i cu un singur raport fix de transmitere adic transmisiile principale
ale punilor. Figura 5.23. a ne nfieaz un asemenea proces de conversie de
cuplu turaie pentru convertizorul de cuplu.
Fig.5.23. Procesul de conversie de cuplu turaie
E
M /M
A
A
n /n
E
M /M
A E
n /n
E A
d
o
m
e
n
i
u
l
d
e
c
o
n
v
e
r
s
i
e
domeniul de conversie
Caracteristicile motoarelor folosite la antrenarea automobilelor 81
Convertizoarele de cuplu cu raport de transmitere variabil continuu fr trepte.
Figura 5.23.b reprezint exemplul unei caracteristici de traciune a crei conversie
este rezumat la un anumit domeniu i la care domeniul de conversie ncepe la
n
A
/n
E
=0, astfel nct la o anumit turaie a motorului diferit de zero (n
E
0) s fie
posibil pornirea de pe loc(n
A
=0).
5.7.1. Funcionarea combinat a motorului i transmisiei n trepte
Dupa cum se tie, funcionarea automobilului n condiii normale de deplasare
are loc n regim tranzitoriu, gama rezistenelor la naintare fiind foarte mare. Acest
lucru impune ca la roile motoare ale automobilului s existe o for de traciune
capabil s echilibreze acest cmp de caracteristici. ntruct motorul simplu nu
poate ndeplini aceast cerin (figura 5.24.a), trebuie ca transmisia s capete
asemenea rapoarte de transmitere nct mpreun cu motorul s poat acoperi mai
bine gama rezistenelor la naintare (figura 5.24.b). Aadar, un motor care urmeaz
s lucreze n agregat cu o transmisie n trepte trebuie s dispun de un cmp de
caracteristic, iar n combinaie cu o cutie de viteze cu patru trepte, se obine pentru
cmpuri de caracteristic de traciune. n acest fel aa, cum se poate vedea i din
figura 5.24, din cmpul de caracteristic a motorului singur (fig.5.24.a) prin
combinarea n agregat cu cutia de viteze cu patru trepte se obine un cmp de
caracteristic ce se apropie destul de mult de cel ideal (fig.5.24.b). Cu toate acestea
ntre limitele caracteristilor motorului si transmisiei i caracteristica ideal mai
exist unele goluri, care prin soluii bine gndite la stabilirea treptelor i a
rapoartelor de transmitere
n
E
M
E
caracteristica ideala
n
A
M
A
1
2
3
4
Fig.5.24. Necesitatea transmisiei mecanice n trepte la
autovehiculele echipate cu motor cu ardere indern cu piston
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 82
( )
k A E k
n n i / = (5.16)
pot fi diminuate, nct s nu influeneze prea mult funcionarea corespunztoare a
automobilului.
Fig.5.25. Deosebirile existente ntre cmpul de caracteristic al motorului singur
i cmpul de caracteristici al agregatului motor cutie de viteze
n figura 5.25 se arat deosebirile existente ntre cmpul de caracteristic al
motorului singur i cmpul de caracteristici al agregatului motor cutie de viteze,
unde s-a considerat c randamentul pentru toate treptele de vitez este
t
=1.
5.7.2. Funcionarea combinat a motorului i transmisia continu fr trepte
Spre deosebire de cazul transmisiei n trepte la transmisia continu, fr trepte
avem o linie caracteristic aa cum se prezint n figura 5.23.b. Din aceast cauz
un punct caracteristic al motorului ofer o linie caracteristic a agregatului format
din acelai motor i o transmisie continu, n timp ce o linie caracteristic a
motorului genereaz un cmp de caracteristici ale forei de traciune a ntregului
agregat. Aceasta nseamn c, n cazul folosirii unei transmisii cu raportul variabil
continuu nu am avea nevoie de un cmp de caracteristic de fora de traciune a
motorului ci, numai de o linie de caracteristic (figura 5.26). S-a considerat
pentru simplificare c linia caracteristic a motorului M
E
=f(n
E
) este
perpendicular de la A la C (figura 5.26.a) i c linia caracteristic a
convertizorului (figura 5.26.b) este tot o linie dreapt. Prin nmulire rezult din
cele dou diagrame cmpul de caracteristic a forei de traciune a agregatului n
ansamblul su, artat n figura 5.26.c. Punctului caracteristic A, din cmpul
n
E
P
E
M
A
n
A
caracteristica ideala
4
3
2 1
Caracteristicile motoarelor folosite la antrenarea automobilelor 83
motorului i corespunde linia caracteristic de motor A din cmpul de
caracteristic al agregatului motor - convertizor (figura 5.26.c); acelai lucru
fiind valabil i pentru punctele caracteristice B i C.
Fig.5.26. Funcionarea combinat a motorului i transmisiei continue fr trepte
Din aceast cauz, liniei caracteristice AC din diagrama motorului(figura
5.26.a) i corespunde cmpul haurat de caracteristic al forei de traciune a
agregatului n ansamblu (figura 5.26.c). Se atrage atenia i asupra faptului c prin
presupunerea unei caracteristici a convertizorului ca n figura 5.26.b este
determinat variaia randamentului
t
=f(n
A
/n
E
) ce urmeaz s se calculeze cu relaia
A n
M
A
A n
M
A 1,0
0,5
A
B
C
0
M /M
E A
0,5 1,0 1
1
2
t
0,5
0,25
t
A
M /M
E
0 0 0,5 1,0
1
2
A
B
C
A E
n /n
rotor pompa rotor turbina
M
A
M
E
n
A
E
n
stator turbina
Fig.5.27. Convertizorul de cuplu
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 84
5.14.
Convertizorul de cuplu se compune dintr-un rotor pomp, un rotor turbine i o
roat directoare (stator turbin) aa cum se arat n figura 5.27.Rotorul pomp se
rotete n majoritatea cazurilor cu aceeai turaie cu a motorului care antreneaz i
absoarbe un moment
2
E E
n M (5.17)
Ca urmare, convertizorul hidraulic de cuplu necesit un motor de antrenare cu
o linie caracteristic a forei de traciune care s fie proporional cu ptratul
turaiei n
E
(figura 5.28.a)
Dac s-ar forma n aceast situaie un agregat de traciune dintr-o
transmisie hidraulic de tip Fottinger i un motor cu o caracteristic ca cea din
figura 5.28.a, atunci parabola rotorului pomp formeaz cu perpendiculara
motorului cel mult un punct de intersecie, dect un singur punct de regim i ca
urmare la ieire se obine numai o linie caracteristic a forei de traciune i nu un
cmp de caracteristic.
n cazul n care, se combin o transmisie hidraulic de tip Fottinger cu un
motor cu ardere intern ce are un cmp de caracteristic de fora de traciune,
atunci din ntregul cmp de caracteristic se utilizeaz aa cum se arat n figura
5.29 numai o singur linie i anume linia cuprins ntre punctele I i II.
n realitate, constanta de proporionalitate a relaiei (5.17) depinde de
temperatura uleiului sau n cazul unor construcii speciale, de momentul de ieire
Fig.5.29. Caracteristica agregatului de
traciune
Caracteristicile motoarelor folosite la antrenarea automobilelor 85
M
A
,n aa fel nct n locul unei linii de regim, s fie o suprafa de regim, care
este ns relativ redus ca mrime.
Uneori se pot folosi combinaii dintre convertizoare de cuplu cu raportul
variabil continuu, fr trepte i transmisii mecanice, cu numr de raporturi de
transmitere comutabile n trepte; cu scopul fie de a corecta o transmisie de cuplu
necorespunztoare fie din necesitatea de a asigura funcionarea agregatului ntr-un
domeniu de regim unde se asigur un randament bun.
n figura 5.30 agregatul format dintr-un motor cu ardere intern i o cutie de viteze
hidraulic de tip Fattinger a fost combinat cu o cutie de viteze mecanic n trepte.
n acest caz, din cuplul de caracteristic a forei de traciune conform figurii 5.30
se formeaz dou cmpuri de caracteristic care se intersecteaz (figura 5.30.f).
Din cauza golului de turaie a motorului, cmpul de caracteristic a forei de
traciune al agregatului motor cutie de viteze hidraulic din figura 5.30 lipsete
poriunea de suprafa nehasurat din diagrama. n consecin pentru 0
1
=
A
n nu
este posibil 0
1
=
A
M , ce conduce la fenomenul de fluaj.
Fig.5.28. Caracteristica agregatului de traciune
M /M
1
0
0
n
A
0,25
1,0
M
A
A
2
0,5
1,0 0,5 0,5 1,0 0
C A n
A
2
E
E A
M /M
M
A
0,5 0 1,0
A
B
B
n /n
A E
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 86
Fig.5.30. Agregatul format dintr-un motor cu ardere intern i o cutie de viteze
hidraulic de tip Fattinger combinat cu o cutie de viteze mecanic n trepte
nE
M
E
1
0,5 0 1,0
E A
M /M
2
0,5 0
0,5
1,0
A1 n
M
A1
2
n /n
E A
1
0 0,5
n /n
1,0
A2 A1
M /M
A2 A1
2
Transmisii mecanice cu
rapoarte in trepte
A2
M
1
A
0
nA2
0,5 1,0
2
3
4
1
2
M
A1
nA1
A2
M
nA2
M
E
nE
6
CAPACITATEA DE MICARE A AUTOMOBILELOR
n capitolele 4 i 6 s-au tratat mrimea rezistenelor la naintare a
autovehiculului i cmpurile caracteristicilor forei de traciune a motoarelor, iar n
acest capitol se va analiza interaciunea acestora, respectiv: capacitatea de micare,
viteza maxim, capacitatea de accelerare i capacitatea de urcare a pantelor.
6.1. Diagramele strilor de micare
Dac se unific cele dou diagrame, cmpul de caracteristic necesar cu
cmpul de caracteristic furnizat ntr-una singur, se obine o diagram a strii
de micare. Cmpul de caracteristic necesar rezult pe baza relaiei (4.15.) n
reprezentarea grafic prin momentul necesar din:
( )
( )
2
2
1
Av c p f G R R R
r
M
x a a p d
d
necesar R
+ + = + + = (6.1)
S-au neglijat rezistena la demarare i influena vitezei vntului pentru a se
obine o dependen mic fa de viteza de deplasare v i pentru a nu fi nevoii s
inem seama de influena maselor n micare de rotaie (). De asemenea,
momentul la roat
R
M a fost
completat cu indicele
necesar.
Un cmp de
caracteristic necesar este
prezentat n figura 6.1., iar un
cmp de caracteristic
furnizat de motor la roile
motoare ale autovehiculului
este reprezentat in figura
6.2. n acest caz s-a notat n
locul indicelui A ieire
indicele R roat.
Momentul
R
M este prezentat
ca funcie de viteza
unghiular t
R R
d d = i
Fig.6.1. Caracteristica necesar
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 88
de turaia roii
R
n .
n conformitate cu relaia (4.23.) se poate scrie:
( )
R t d R r
a r r V = = 1 (6.2)
Pentru aceasta este ns necesar s cunoatem raza dinamic
d
r i alunecarea
la antrenare
t
a .
6.1.1. Diagrame siplificate ale capacitii de mers
Dac nu se ine seama de alunecare 0 =
t
a , atunci relaia (6.2.) devine:
R
d r V = (6.3)
i dac se consider c raza de rulare r r i raza dinamic sunt independente de
viteza V , atunci cmpul de caracteristic necesar i cmpul de caracteristic
furnizat din figurile 6.1. i 6.2.se pot suprapune i forma diagrama strii de
micare a automobilului, aa cum se arat n figura 6.3..
120
1000
P = 40 [CP] n = 4000 [rot/min]
M = 8.9 [daN] n = 2000 [rot/min]
t
20
200 0
0
400
40
20
40
80
800 600
60 100
3
M ( furn) [daNm]
R
mot
mot
100
80
60
2
120
140
1
i = 2.06
i = 1.26
i = 0.89
i = 4.375
h = 0.9
4
0
2
3
i = 3.80
1
P
P
R
n [ rot/min]
w [ rad/s]
R
1200
140
1400
180
4
Fig.6.2.Caracterstica oferit
Capacitatea de micare a automobilelor 89
Aceast prezentare grafic poart numele, dup cum se tie, de caracteristica
de traciune a automobilului.
Fig.6.3.Caracteristica de traciune a automobilului
La fel se poate obine i caracteristica ( ) v f P= , numit caracteristica puterilor
sau diagrama capacitii de micare (fig. 6.4.). Puterea necesar se calculeaz cu
relaia (4.27.), iar puterea furnizat cu ajutorul figurii 5.24. b) i a relaiei (6.3.).
Fig.6.4. Diagrama capacitii de micare
Deoarece nu s-a inut seama de alunecarea dintre roi i calea de rulare i de
influena maselor n micarea de rotaie, respectiv de coeficientul , pe curbele din
figura 6.5. i 6.4. se scrie fie valoarea pantei p fie expresia t v g d d , respectiv
120
V [km/h]
0.35
R
400
300
100
200
20 0 40
0.10
60 80
M /r
100
R d
0.05
0.0
a = 0
0.15
0.25
0.20
0.30
500
R d
M /r [daN]
0.40
d dv
g dt
p +
= 0.45
R
r = 0.3 m
r = 0.306 m
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 90
conform relaiilor (4.17.) i (6.4.) cu neglijrile menionate mai sus sunt uzuale i
se folosesc aproape n exclusivitate.
6.1.2. Diagramele ale capacitii de mers
n analizele fcute pn acum nu s-a inut seama de alunecarea dintre roi i
calea de rulare, ns conform relaiei (6.2.) trebuie s se in seama de alunecare. n
figura 6.5. a) este prezentat variaia reaciunii tangeniale 2 X n funcie de
alunecare.
Fig.6.5. Variaia reaciunii tangeniale 2 X n funcie de alunecare
S-a renunat la reprezentarea fr dimensiuni i pe ordonat se reprezint
reaciunea tangenial 2 X , considerndu-se c automobilul are o singur punte
motoare i este dispus n spate. n cazul mersului cu vitez constant, reaciunea
tangenial se calculeaz cu relaia:
r
d
R
R
r
furnizat M
X =
) (
2 , 1
(6.4)
Cu aceast relaie i cu ajutorul diagramei din figura 6.2. se poate trasa
caracteristica din figura 6.5. b). Din figurile 6.5. a) i 6.5. b) obinem datele
necesare pentru a reprezenta grafic (fig. 6.6.) influena alunecrii pentru diferite
stri ale drumului asupra forei la roat
d R
r furnizat M / ) ( furnizate de motorul
respectiv.
Din figura 6.6. rezult c prezena alunecrii n contactul roat-sol, deplaseaz
curba caracteristic a forei la roat (furnizate de motor) ctre stnga, mrimea
acestei deplasri crete cu mrirea alunecrii produs de calitatea
necorespunztoare a suprafeei drumului.
Se cunoate c viteza influeneaz procesul de rulare al roii mai ales pe
drumurile ude. Dac dorim s inem seama i de acest fapt, trebuie s alegem o alt
300
100
200
= 1 -
r
d r w
a = 1 -
r R
0.6
r
r
zapada
0 0.2
a)
0.4
V
0.8 1.0
400
2 X
[daN]
uscat
40 0
100
20
200
300
60
b)
80 100
R
w [rad/s]
r 2
140 120 160
R
r
R d
furnizat
M /r
r = 0.3 m ;
2
400
r
r = 0.3 m
d
X
[daN]
Capacitatea de micare a automobilelor 91
combinaie de diagrame pentru a determina alunecarea i pentru a calcula viteza cu
relaia (6.2.).
Fig.6.6. Influena alunecrii pentru diferite
stri ale drumului asupra forei la roat
Mrimea poriunii tangeniale nu se calculeaz din caracteristica furnizat,
ci din caracteristica necesar conform relaiei
Ra
t
x
g
Ga X X +
(
+ = + sin
d
d 1
2 1
(6.5)
n cazul n care avem de-a face cu un automobil cu o singur punte motoare i
se deplaseaz cu vitez constant:
2
2
1
2 1
V A Cx p Ga Ra Rp X X + = + = + (6.6)
Dac puntea motoare este pus n spate:
1 1
Rr X =
i atunci
1 2
Rr Ra Rp X + + = (6.7)
iar alunecarea se determin prin intermediul figurii 6.7., unde se vede c la aceeai
poriune tangenial, valorile alunecrii variaz din cauza vitezei de deplasare.
Trebuie avut n vedere c sarcina pe roat, Z nu este constant, pentru
diferitele mrimi ale reaciunii tangeniale X aa cum s-a considerat n figurile
(6.3.) i (6.4.). Din contr, sarcina pe roat Z se modific cu creterea pantei; dac
puntea motoare este dispus n spate Z crete odat cu mrirea pantei. De
asemenea, dac automobilul se deplaseaz cu vitez variabil, intervine
treapta 3-a fig. 6.5. a)
0 30 20 40 50 60 70 80 100 90
fara alunecare
drum uscat
drum cu zapada
fig. 6.5. a)
V [km/h]
[daN] R
M
r
d
100
120
140
160
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 92
coeficientul de influen al maselor n micare de rotaie i alunecarea t a .
Trebuie amintit c i razele de rulare i dinamice r r i d r sunt dependente de viteza
de deplasare a automobilului.
Fig.6.7. Determinarea alunecrii
n analizele ce urmeaz, se va ncepe cu diagramele mai simple i pe parcurs
se va aduga n msura n care este necesar reprezentrile mai complicate.
Indicii folosii pn acum E - intrare i A - ieire, vor fi nlocuii cu indicii
M - motor i R - roat:
Puterea
M t M
P P = (6.8)
raportul de transmitere R M R M t n n i = = (6.9)
momentul M t t R M i M = (6.10)
Dac se ine seama de relaia 6.2., de faptul c
R R
n = 2 i de relaia
(6.9.) se poate scrie
min / 65 . 2
1
min / 65 . 2
1
/ rot
n
m
r
i
a
rot
n
m
r
i h km
v
M d
t
M r
t
= (6.1.)
De asemenea nu se vor mai folosi indicii de necesar i furnizat, ci indici
care s exprime starea de micare
) ( ) ( furnizat R mecesar R
M M = .
6.2. Viteza maxim de deplasare pe un drum orizontal
500
400
300
0.20
p = 0.45
0.35
0.30
0.25
0.40
120
0.0
v 100
Rr
V [km/h]
2
80 40 60
100
v 20 0
1
0.05
0.10
200
0.15
X2
1
v
2
v
v 0
500
2
[daN]
X
400
300
1.0 0.6 0.4
a)
0.8
d r
r w
r
r
a = 1 - = 1 -
r v
100
0.2 0
200
[daN]
b)
Capacitatea de micare a automobilelor 93
Punctul unde se intersecteaz curbele ce reprezint rezistenta la naintare
pentru 0 = cu curba caracteristic furnizat in ultima treapt a cutiei de viteze
(figurile 6.3. i 6.4.)msoar pe abscis viteza maxim a automobilului n timpul
deplasrii pe un drum orizontal.
Viteza maxim poate fi i calculat dac se cunosc toate datele automobilului
i motorului cu relaia forei la roat:
2
max 2
1
V A Cx Ga f Ra Rr
r
i M
r
M
d
t t M
d
R
+ = + =
= (6.11.)
sau din relaia puterii:
( )
|
.
|
\
|
+
=
= +
= =
3
max max
max
2
1
1
1
1
1
V A Cx V Ga f
a r
r
V Ra Rr
a r
r
P P
d
d
r
M t R
(6.12.)
Pentru proiectarea unui automobil este foarte important identificarea datelor
potrivite ale motorului i transmisiei n raport cu datele cunoscute ale
automobilului i n raport cu viteza maxim cerut sau propus.
Dac nu se ine seama de alunecare, puterea motorului corespunztoare vitezei
maxime se obine cu relaia:
(
+
2
max max) (
2
1
max
1
V A Cx V Ga f
P
t
V M
(6.13.)
Dac se concepe un motor pentru aceast putere, sau dac se apreciaz dup
acest criteriu caracteristica de sarcin total atunci puterea
( )
max
V M
P se obine la
turaia
( )
max
v M
n , (6.8.).
Relaia dintre aceast turaie i viteza maxim de deplasare
max
V rezult din
relaia (6.3.) respectiv
P R
n = 2 :
max) ( max) (
2
max
V M
t
d
V M
t
d
n
i
r
r
V
= (6.14.)
Cu ajutorul relaiei (6.14.) se poate calcula raportul de transmitere minim
min t i :
max
2
max
max max
min
V
n
r
V
r i
M
r
M
r t
= (6.15.)
Cu valoarea min t i i cu t (cunoscut sau aproximat) se poate transpune
caracteristica exterioar de turaie M P din figura 6.8. a) n figura 6.8. b).
n final se pot se pot efectua calculele prin care s se in seama de datele
pneului, diferena dintre aceste calcule (rezultate) i cele de mai sus (aproximative)
nu vor fi prea mari ntruct la deplasarea automobilului cu vitez maxim,
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 94
reaciunea tangenial va fi redus i prin urmare i alunecarea la alunecare este
foarte mic.
Capacitatea de micare a automobilelor 95
Fig.6.8. Caracteristica exterioar
Corelaia dintre viteza maxim ) (
max
V , puterea motorului i raportul de
transmitere minim se poate realiza cu uurin pentru cazul particular la care curba
puterii absente intersecteaz curba puterii furnizate de motor la roile motoare n
punctul de valoare maxim a acestora (figura 6.9. b).
Fig.6.9. Determinarea puterii maxime necesare
n aceast situaie:
max max) ( M t V R
P P = (6.16.)
iar turaia corespunztoare vitezei maxime:
P (Vmax)
a)
n
M_max
M
n
P (Vmax)
M
M
P P
R
t
h
M
P
Vmax
b)
P
R
V
M
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 96
P P M V M
n n n = =
max) ( max) (
(6.17.)
Pornind de la acest caz particular prezentat n figura 6.10. prin curba 1. (deci
cazul 1.) se face o comparaie cu alte cazuri mai generale.
Fig.6.10. Puterea necesar i puterea oferit de motor
Cazul 2. Viteza maxim se obine la o turaie a motorului mai mare dect
turaia corespunztoare puterii maxime P n i sub turaia maxim admisibil a
motorului ) (
(max M
n . Prin aceasta viteza maxim de deplasare
max
V este mai mic
dect cea obinut n primul caz, dar la viteze de
max
V V < puterea excedentar este
mai mare ceea ce duce la mrirea capacitii de urcare a pantelor i de accelerare.
Cazul 3. Turaia motorului corespunztoare vitezei maxime a automobilului
este mai mic dect turaia corespunztoare puterii maxime.
Fig.6.11. Dimensionarea motorului funcie de sarcina util
Pentru a se obine viteza maxim motorul se rotete cu o turaie mic este
deci protejat dar necesit un raport de transmitere al transmisiei corespunztor
P
V max
V
2
1
3
M
h
t
P
R
P
P
R
Capacitatea de micare a automobilelor 97
pentru a asigura un mers economic, cu un consum mic de combustibil.
Dezavantajul const ns n lipsa unei puteri disponibile suficiente. Prin
combinarea cazului 1 cu 3 se poate obine n timpul deplasrii normale un mers
economic, iar n cazul n care devine necesar accelerarea s se poat folosi cazul
1. Aceste cazuri diferite apar i n timpul exploatrii unui automobil prin faptul c
variaia curbelor rezistente se deplaseaz aa cum se arat n figura 6.11. n cazul
descrcrii ctre viteze maxime mai ridicate (exemplul autocamioanelor).
n locul diferiilor parametri: R P , f , Ga , etc. Se pot utiliza mrimi raportate.
De exemplu mprim relaia (6.12.), respectiv (6.13.) la greutatea autovehiculului
Ga :
|
.
|
\
|
+
= =
3
max
max) ( max) (
2
1
max
1
1
V A
Ga
Cx
V f
a r
r
Ga
P
Ga
P
d
r
V M V R
(6.18.)
sau cu suficient precizie:
3
max
max) (
2
1
max V
Ga
A
Cx V f
Ga
P
V R
+ (6.19.)
Raportul
a
G P se numete putere specific i se exprim n general n
kN CP sau daN CP .
Fig.6.12. Dependena dintre raportul Ga P
V M
/
max) (
i viteza de deplasare
P (Vmax)
100
60
40
20
0 50
140
100
120
80
160
M
-
4
200 150 250
0
m
/d
a
N
2
2
1
0
8
C
A
/
X
t
h
Ga`
-
3
2
1
0
4
-
4
1
0
1
0
-
4
-
4
Vmax [kM/h]
G
a
=
1
0
m
/
d
a
N
P max
M
Ga`
Ga` = Go + Gu/2
kN
CP
M
P max
P (Vmax)
Ga`
M
Ga`
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 98
n figura 6.12. se reprezint dependena dintre raportul Ga P
V M
/
max) (
i viteza
de deplasare pentru o valoare f i pentru valori diferite
a x
G A c . Aceste
curbe sunt determinate prin calcul, pe baza datelor indicate de productorii de
autovehicule. Domeniul haurat reprezint puterea specific ' / max) ( Ga P V M pentru
diferite rezistene la naintare (i puterea specific ' (max) Ga PM ale unor autoturisme
existente n funcie de viteza maxim.
n ncheiere se va prezenta un exemplu numeric de determinare a raportului de
transmitere min t i , pentru un autoturism echipat cu un motor cu aprindere prin
scnteie, la care:
max V
n 4000... 5500 [rot/min]
max
V 120... 200 [km/h]
r
r 0.3 m
folosind relaia 6.11. pentru alunecare 0 = a :
1 . 3 ...... 8 . 3
65 . 2
3 . 0
200
5500
......
120
4000
min
|
.
|
\
|
= i
iar n cazul unui autocamion echipat cu m.a.c.
max V
n 2500 [rot/min]
max
V 80 [km/h]
r
r 0.52 m
folosind aceeai relaie i pentru aceeai alunecare
1 . 6
65 . 2
52 . 0
80
2500
min
= i
6.3. Capacitatea de urcare a pantelor
n cazul cnd viteza de deplasare V este mai mic dect viteza maxim
max
V ,
se poate folosi conform figurii 6.3. fora de traciune excedentar adic diferena
dintre momentul motor la roat
R
M raportat la raza dinamic
d
r i rezistena la
rulare
r
R i se cere Ra pentru nvingerea rezistenei unor pante. Conform relaiei
(6.1.) n cazul deplasrii automobilului cu vitez constant avem:
) (
a r
d
R
a P
R R
r
M
G p R + = = (6.20)
din care se poate obine panta ce poate fi urcat p.
Odat cu creterea valorii pantei p, viteza de deplasare se reduce, n afar de
cazul coborrii unei pante (p- avnd valoare negativ) cnd viteza de deplasare
Capacitatea de micare a automobilelor 99
poate s fie mai mare dect viteza maxim la deplasarea pe drum orizontal, dac
conductorul auto i sistemul de antrenare permit acest lucru.
Fig.6.13. Influnea ncrcrii automobilului asupra
capacitii de urcare a pantelor
n figura 6.13 se arat modul n care ncrcarea automobilului influeneaz
capacitatea de urcare a pantelor. Acest lucru se poate obine mai simplu dac n
relaia 6.1 se ine seama numai de parametri ce depind de greutatea total G
a
, adic:
a
d
R
a p r
R
r
M
G p f R R = + = + ) ( (6.21)
n figura 6.13 se prezint i dependena M
R
/r
d
- R
a
n funcie de vitez, raportat
la greutatea G
a
, n aa fel nct pe ordonat panta p s se msoare de la f i nu de la
c
f R
r
M
G
p
a
d
R
a
= ) (
1
(6.22)
Capacitatea maxim de urcare a pantelor n interiorul unei viteze (n cazul unui
motor cu ardere intern combinat cu o cutie de viteze n trepte) nu se suprapune aa
cum arat figura 6.14 cu valoarea maxim a momentului de roat M
Rmax
, ci se
situeaz din cauza rezistenei aerului care crete cu viteza la o vitez mai mic.
Acest lucru arat semnificaia comportamentului momentului la roat n partea
stng a valorii maxime (trasat cu linii ntrerupte) unde, pentru un moment mai
mare la unele pante, conductorul nu este obligat s cupleze o treapt cu un raport
de transmisie mai mare. Panta maxim p
max
se nvinge n treapta I-a a cutiei de
viteze cu raportul de transmisie maxim
max t
i , sau invers
max t
i se concepe n aa fel
nct s se poat urca panta maxim p
max
. Dac n ecuaia (6.21) se neglijeaz
rezistena aerului R
a
se obine:
1
p max
200
-
R
a
=
R
r
+
R
p
=
(
f
+
p
)
G
a
0.20
0.10
f
0.10
0 20
100
r
R
M
d
0.40
0.30
0.50
p
(
G
a
=
9
5
0
d
a
N
)
0.30
p
(
G
a
=
1
1
8
0
d
a
N
)
0.20
0.40
0.36
400
300
500
100 40 60 80
3
140 120
Vmax [kM/h]
4
2
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 100
a p r
d
R
G p f R R
r
M
) (
max max
max
+ = + = (6.22)
Fig.6.14.
M
Rmax
se obine cu relaia:
t t M R
i M M =
max max max
(6.23)
Din cele dou relaii rezult:
G p f
r
M
d
M t t
+ =
) (
max
max max
(6.24)
iar raportul de transmitere maxim:
t M
d a
t
M
r G p f
+
=
max
max
max
) (
(6.25)
viteza de deplasare a automobilului pe drumul cu nclinare maxim n conformitate
cu relaiile (6.2), (6.9) i
R R
n = 2 se determin cu expresia:
a
M M M
d
r
t
M M r
G p f
M n M
r
r
i
n r
v
M
) (
) (
2 2
max
max max
max
) (
max
+
=
= (6.26)
de panta
conditionata
maxima
Rezistenta
p
V max
V
cutiei de viteze
in ultima treapta a
Momentul la roata
aerului
rezistenta
la rulare si
Rezistenta
V
R
M
d
r
M max
R
r
d
Capacitatea de micare a automobilelor 101
respectiv cu unitile de msur corespunztoare:
| | | | | |
| | | |
a
M M
M
d
r
M M
r
t
G
daN
rot
n
daNm
M
r
r
p f
rot
n
m
r
h km
v
+
=
= =
min / ) ( 65 , 2
min / 65 , 2
1
/
max) (
max
max
max) (
max
(6.27)
n continuare se prezint un exemplu de calcul pentru un autoturism
cunoscndu-se urmtoarele date:
f=0,015; p
max
=0,30 (30%); r
d
=0,3 m; G
a
=1400daN, M
Mmax
=13,2 daNm,
n
M(Mmmax)
=2200 rot/min, 87 , 0
t
( )
5 , 11
2 , 13 87 , 0
3 , 0 1400 3 , 0 015 , 0
max
=
+
=
t
i
Dac din consideraiile paragrafului 6.2 se adopt 5 , 3
min
t
i atunci:
3 , 3
min max
=
t t
i i
adic cutia de viteze trebuie s acopere transmiterea dintre 1 (viteza maxim) i 3,3
(panta maxim ce poate fi urcat).
Viteza de deplasare este pentru panta maxim:
h km v / 7 , 21
5 , 11 65 , 2
2200 3 , 0
=
=
ntruct la deplasarea automobilului pe pante mari forele tangeniale de
traciune sunt i ele mari, trebuie s se in seama de alunecarea dintre roile
motoare i calea de rulare prin relaia urmtoare r
r
= r
d
(1-a).
n exemplul de calcul prezentat mai sus se apreciaz c alunecarea este a=0,15; din
aceast cauz, viteza de deplasare se reduce la:
| | h km v / 4 , 18
5 , 11 65 , 2
2200 85 , 0 3 , 0
=
=
Pentru a se forma o imagine corect asupra capacitii autoturismelor in
comparaie cu capacitatea de urcare a pantelor a autocamioanelor se va prezenta si
un exemplu de calcul pentru autocamioane cu datele:
r
d
=0,53 m; M
Mmax
=90 daNm;
( )
max M
M M
n =1400 rot/min; G
a
=16000 daN (ncrcat,
fr remorc), G
a
=32000 daN (ncrcat si cu remorc). Se menin aceleai valori
pentru f, p
max
. si
t
:
( ) ( )
66
90 87 , 0
52 , 0 16000 32000 30 , 0 015 , 0
max
+
=
respectiv
i
t
respectiv 33
Cu 6
min
=
t
i ( din paragraful 6.2) rezulta un raport de:
11 /
min max
=
t t
i i respectiv 5,5
Vitezele de deplasare pentru panta maxim sunt:
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 102
( )
2 , 4
33 66 65 , 2
1400 52 , 0
=
sau
v sau 8,3 km/h.
La autocamioane, in raport cu situaia existent la autoturisme, domeniul de
transmitere este mult mai mare. Acest lucru se datoreaz vitezei minime relativ
mici si rezistenei aerului de asemenea mic in comparaie cu rezistenele
dependente de greutate
r
R si
p
R . Din aceeai cauz, autocamioanele dispun de
mai multe trepte de viteze in comparaie cu autoturismele, pentru a obine o
apropiere ct mai bun de hiperbola ideal a forei de traciune.
n tabelul 6.1 sunt prezentate date pentru autoturisme si autocamioane privind
capacitatea de urcare a pantelor n procente pentru diferite trepte de vitez.
n continuare ar trebui sa se verifice dac fora de aderen dintre pneuri si
calea de rulare este suficient, dar aceast problem se va studia in cadrul
capitolului 7.
Tabelul 6.
Autoturisme
P(%) in treptele de viteza Nr.
crt
Tipul
I II III IV
Gradul de
ncrcare
1 Audi 80 PS 46 25 16 10 ncrcat
2 Autobianchi Primula 35 21 12,5 7 1/1
3 B.M.W.2550 71 32 18 12 1/2
4 Citoen 2cv 26 13 7 3,5 1/1
5 Fiat 124 36 20 11,5 6,5 1/1
6 Fiat Neckar 1100 32 18 10,5 6,0 1/1
7 Ford 12 M 38,2 21,7 12,7 7,8 1/2
8 Mecedes 250 57 32 18 10,0 1/2
9 Mercedes 250 SE 70 32 17,5 11,2 1/2
10 Opel Kadet 45 PS 39 20,5 11,5 6,5 1/2
11 Renault R 16 32 18,5 11,5 5,5 1/1
12 VWVariant 1600A 41,5 21,5 12 7,5 1/2
Autocamioane
P(%)- in treptele de viteza Nr.
Crt
Tipul
Greutatea
[daN]
I II III IV V VI
1 Fiat 645N 7400 27 13,6 7,6 4,4 2,3 -
2 Faun F610/465 v 16.000 49,6 25,5 16,1 9,9 5,8 2,9
3 Faun 910/40v 84 32000 23 14 8,5 4,5 2,5 1
4 Magirus D12 FL 12000 28,3 13,7 6,5 2,8 1,4 -
5 MAN 13.215 BF 38000 19,9 10,4 5,5 2,6 1,2 0,4
6 Krupp SF 380 38000 18,0 9,8 5,1 3,4 1,4 1,0
7 Mercedez Benz LP 1418 14500 31,8 15,6 6,9 4,0 2,2 -
Capacitatea de micare a automobilelor 103
P(%)- in treptele de viteza Nr.
Crt
Tipul
Greutatea
[daN]
I II III IV V VI
8 Mercedez Benz LP 1418 30500 13,8 6,5 2,6 1,2 - -
9 Mercedez Benz LP 1620 16000 40,4 21,3 12,1 6,7 4,4 2,3
10 Mercedez Benz LP 2020 38000 14,7 7,8 4,1 1,9 0,8 0,2
11 Stey 5680E 12000 51,5 24,8 12,9 6,7 3,9 -
12 Volvo FB88 38000 18,5 12,5 8,4 5,8 3,5 2
Revenind la figura 6.14, vom analiza capacitatea de urcare a pantelor in ultima
treapta a cutiei de viteze; vom observa ca odat cu creterea vitezei maxime, creste
si capacitatea de urcare a pantelor in ultima treapta a cutiei de viteze. Pentru viteza
maxima este valabila (cazul 1 din figura 6.10) urmtoarea relaie:
( )
( )
d x a M M t t P R
r v A c G f P M i M
R
(
+ = =
2
max max min
2
1
max
(6.28)
pentru momentul maxim al motorului
max M
M se poate urca o panta p ce rezulta din
relaia
( )
d x a M t t R
r v A c G p f M i M
(
|
.
|
\
|
+ + = =
2
max min
2
1
(6.29)
respectiv
( ) ( )
( )
( )
)
(
(
+
(
+
(
=
max
2
max
2
max
max 2
max
max
max
1 1
2
1
M M
M M
M M
M
a
x
M M
M
P n
M n
P M
M
v
G
A c
P M
M
f p
(6.30)
Neglijndu-se alunecarea si diferena dintre razele roilor (raza dinamica si
raza de rulare) s-a considerat viteza de deplasare proporional cu turaia motorului
M
n .
Utilitatea relaiei 6.30 va fi demonstrata printr-un exemplu de calcul; se are in
vedere un autoturism la care se cunosc datele:
h km s m v 144 40
max
= = ; f = 0,01; | | kg m G A c
a x
2 3
10
=
iar pentru un motor cu aprindere prin scnteie, conform tabelului 5.1:
( )
18 , 1
max
max
=
M M
M
P M
M
;
( )
( )
81 , 1
max
max
=
M M
M M
M n
P n
| | | | | | { }
0
0
1
9 09 , 0 7 , 0 18 , 0 10 18 , 0 01 , 0 + + =
p
Rezultatele obinute ne arata ca autoturismul analizat poate sa urce in ultima
treapta a cutiei de viteze o panta de 9%, iar viteza de deplasare scade in timpul
acestei urcri la
h km s m v v / 80 / 22 81 , 1 /
max
=
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 104
Exemplul numeric prezentat, demonstreaz faptul ca in relaia 6.30 este
importanta cea de-a doua paranteza (in interiorul acoladelor), in special raportul de
turaii ( ) ( )
max max M M M M
P n M n si mai puin raportul ( )
max max M M M
P M M .
Este deci important ca valoarea maxima a momentului motor
max M
M s se
obin la o turaie cat mai mica pentru a rezulta un raport cat mai mare al turaiilor.
Un astfel de motor se numete motor elastic- deoarece asigura automobilului
capacitatea de a nvinge rezistenele la naintare prin cuplarea mai rar a treptelor
din cutia de vitez. Aceasta afirmaie este valabila daca motorul elastic debiteaz
aceeai putere maxima
max M
P pentru a realiza aceeai viteza maxim. Dac de
exemplu cu un motor care debiteaz o putere maxim mai mic, restul parametrilor
meninndu-se aceeai
( ) ( )
( )
max max
,
M M
P M M M
n n viteza maxim s-ar micora la
h km s m v / 108 / 30
max
= = , iar panta p va fi:
( )
0
0
2 2
5 05 , 0 7 , 0 18 , 0 10 6 , 5 18 , 0 10 + + =
p
Deducem din acestea ca exist si o anumit elasticitate a automobilului
determinat de factorul situat in faa acoladei ( )
2
max
v G A c
a x
.
Se afirm uneori ca un motor cu o putere maxim mai mic, dar care dispune
de un comportament mai bun al momentelor este mai avantajos. Aceast afirmaie
poate fi verificat cu ajutorul celor doua exemple prezentate mai nainte, cu
condiia ca cel de-al doilea automobil cu s m v / 30
max
= sa aib aceeai capacitate
de urcare a pantelor ca si primul, respectiv p = 9% la viteza v = 22 m/s; rezult un
raport de turaii ( ) ( ) 36 , 1 22 30
max max
= =
R M M M
M n P n i raportul de randamente
( ) 97 , 1
max max
=
M M M
P M M , ceea ce nu este posibil la un motor cu ardere intern.
n exemplul nostru aceasta ar nsemna situaia paradoxal c puterea ar fi mai mare
pentru panta maxim dect pentru viteza maxim.
n concluzie, rezult din cele artate ca pentru ultima treapt a cutiei de viteze,
automobilul cu viteza maxim mai mare este superior automobilului cu viteza
maxim mai mic.
6.4. Capacitatea de accelerare
O component important a capacitii de micare a unui automobil este
capacitatea de accelerare definit de relaia:
t
v
g
G
R
a
d
d
d
=
Din relaia:
Rp Ra Rr
t
v
g
G
r
M
a
d
R
+ + + =
d
d
(6.31)
Capacitatea de micare a automobilelor 105
rezult n cazul deplasrii pe un drum orizontal ( ) 0 =
P
R acceleraia raportat la
acceleraia gravitaional g, dup cum urmeaz
Ga
Ra Rr r M
g t
v
D R
+
=
) ( / 1
d
d
(6.32)
Dac coeficientul ce ine seama de influena maselor n micare de rotaie,
ar fi constant pentru ntreg domeniul de vitez, atunci acceleraia dt dv devine
proporional cu fora de traciune excedentar (fig. 6.15. b)).
Pentru cazul particular cnd 1 = , adic masele n micare de rotaie sunt att
de mici nct pot fi neglijate, prin compararea relaiei (6.32.) cu relaia (6.20.)
rezult:
p
dt
dv
g
= = ) 1 (
1
(6.33)
adic mrimea acceleraiei raportate este identificat cu panta ce urmeaz s fie
urcat (la o anumit vitez panta p=0.1=10% corespunde unei deplasri n
deplasarea orizontal % 10 1 , 0 dt d = = g v dv din acceleraia gravitaional. n
aceast situaie exist coresponden i ntre diagramele din figurile 6.15. b), 6.15.
c) i 6.13.
Se tie c 1 > i se modific n funcie de raportul de transmitere al cutiei de
viteze. innd seama de acest fapt nu mai este valabil relaia (6.33.), respectiv:
1
1
< =
p
g dt
dv
(3.34)
n figura 6.15. este prezentat influena coeficientului asupra acceleraiei
unui automobil prevzut cu o cutie de viteze cu patru trepte. Se observ c n
ultima treapt a cutiei de viteze influena coeficientului este foarte mic, nct se
poate spune c este valabil relaia 6.33., n timp ce n prima treapt, acceleraia
este sensibil mai mic pentru 1 > dect pentru 1 = . Din aceast cauz, prima
treapt nu se concepe n general dup criteriul capacitii de accelerare, ci dup
criteriul capacitii de urcare a pantelor (vezi relaia 6.25.).
6.4.1. Determinarea spaiului i a timpului de accelerare
Deceleraia t v d d nu este constant aa cum s-a artat i n figura 6.15. c)
ci reprezint o funcie matematic de vitezaV :
( ) v f
t
v
a = =
d
d
(6.35)
n studierea demarajului unui automobil, parametrul acceleraie nu prezint
mult interes aa cum este apreciat deceleraia la frnarea automobilului i din
aceast cauz aprecierea demarajului sau a capacitii de accelerare se face prin
timpul i spaiul de demarare. n acest sens, se specific, date cum sunt de
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 106
exemplu: automobilul respectiv accelereaz de la V = 0 la V = 80 km/h n 8.7
secunde, sau c automobilul parcurge distanta de 1km de la pornire n 30 secunde.
n plus, parametrii amintii pot fi obinui prin msurtori i n cercetri
experimentale. Deci, pentru a putea calcula i cunoate modul de desfurare al
deplasrii unui automobil pe o distan dat, avem nevoie de viteze, spaiu i timp.
Din aceast cauz vom analiza n cele ce urmeaz integralele funciei ( ) v f dt dv = .
Fig.6.15. Capacitatea de accelerare
Conform relaiei (6.35.), dependena dintre timp i vitez este
2
0 20 40
1
d > 1
d = 1
80 60 100 140 120
4
3
Rr +Ra
Rr
V [km/h]
0
0.05
0.15
0.10
0.40
0.20
0.30
0.25
0.35
0.45
150
50
100
400
300
200
250
250
450
150
50
0
100
400
300
200
250
250
450
1
d
v
d
d
t
d
M
/
r
-
(
R
r
+
R
a
)
R
M
[daN]
r
d
R
a)
b)
c)
Capacitatea de micare a automobilelor 107
( )
+ =
1
d
1
c v
v f
t (6.36)
respectiv timpul elementar t pentru accelerarea automobilului de la viteza V1 la
viteza V2 este:
( )
=
2
1
d
1
V
V
v
v f
t (6.37)
Fig.6.16. Calculul performanelor
80
P
o
r
n
i
r
e
i
n
t
r
.
1
-
a
4
x
[s]
t
60
50
40
20
10
30
[s]
x [m]
1000 500 0 250 750
d)
1250 1500 1750
60
30
10
20
50
40
[s]
t
80 40 20 0 60
c)
V [km/h]
100 120 140
b)
0
2
1
3
Vmax
3.0
x
t [s]
30 10
0.5
0
1.0
20
2.0
1.5
2.5
[s]
Vmax
g)
40 50 70 60
60
200
20 0 40
600
400
800
V [km/h]
80 100
f)
120 140
1200
1000
0
40
20
60
T
r
.
2
T
r
.
1
e)
Vmax
T
r
.
4
T
r
.
3
[s]
dv/dt
1
[s /m]
dv/dt
2
5
V
100
3.0
0.5
1.0
1.5
2.0
2.5
2
[m/s ]
dt
dv
T
r
.
4
T
r
.
3
P
o
r
n
i
r
e
i
n
t
r
.
1
-
a
T
r
.
1
0
T
r
.
2
a)
Vmax
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 108
Reprezentarea grafic a funciei t(v) este ilustrat n figura 6.16. c). Aceast
reprezentare s-a obinut cu ajutorul figurii 6.16. a) dac ) ( d d v f t v = este
constant.
n primul domeniu se nchide golul de turaie iar n domeniile urmtoare se
arat deplasarea n diferite trepte ale cutiei de viteze. Sunt stabilite punctele de
cuplare i pentru simplificare se consider c schimbarea treptelor se face
instantaneu (fr pauz). n figura 6.16. b) este reprezentat variaia inversului
acceleraiei n funcie de vitez prin integrarea creia obinem dependena timp de
demarare-vitez, aa cum se arat in figura 6.16. c).
Variaia funciei spaiu-timp rezult din integrarea expresiei t x V d d = dup
cum urmeaz:
+ =
2
d c t v x (6.38)
respectiv:
=
2
1
d
t
t
t v x (6.39)
Dependena timpului de spaiu pentru o anumit valoare a acceleraiei este
artat in figura 6.16. d), trasat cu ajutorul figurii 6.16. c). Panta curbei spaiu-
timp se apropie asimptotic de Vmax. Se poate deriva i dependena vitez-spaiu
(exemplu pentru a rspunde la ntrebarea ce spaiu poate fi parcurs din momentul
pornirii i pn la atingerea unei anumite viteze) pornind de la relaia (6.35.)
( )
x
v
v
t
x
x
v
t
v
v f
d
d
d
d
d
d
d
d
= = =
n care:
( )
+ =
3
d c v
v f
v
x (6.40)
respectiv distana parcurs ntre vitezele V1 i V2:
( )
=
2
1
d
V
V
v
v f
v
x (6.41)
Figurile 6.16. e) i 6.16 f) arat aceste dependine grafic. De aici se poate
obine funcia spaiu-timp.
( ) x v
t
x
=
d
d
de unde
( )
+ =
4
c
x v
dx
t
(6.42)
respectiv durata n timp
Capacitatea de micare a automobilelor 109
( )
=
2
1
d
V
V
s v
x
t (6.43.)
ceea ce este reprezentat n figura 6.16. g).
6.4.2. n cazul automobilelor cu caracteristica de traciune ideal
n continuare se va exemplifica cele analizate mai nainte la automobilele ale
cror motoare dispun de caracteristici ideale de traciune (hiperbole echilatere).
Fig.6.17. Curba rezistenelor la rulare
B
10
asimptota
pentru A si B
V [m/s]
1.5
1.0
2.0
0.5
dt
1
2
[s /m ]
dv
V [m/s]
40
A
20
B
0 10
asimptota
pentru C
30
asimptota
pentru A si B
c)
C
400
200
50 0
e)
600
800
[m]
x
dt
[m/s]
dv
40 20
1
0
b)
10
2
B
30
A
4
C
3
5
20
50 0 10
10
d)
[s]
t
30
40
V [m/s]
t [s]
30 20
B
40
A
C
C
asimptota
pentru C
20 30 50 40
A
V [m/s]
10
100
0
a)
200
[daN]
Ft
400
300
C
500
20 30
B
40 50
A
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 110
n figura 6.17. este trasat curba rezistenelor la rulare i a sensului, pentru un
automobil echipat cu dou motoare diferite, unul notat cu A ce ofer o vitez
maxim Vmax = 50 m/s = 180 km/h, i cellalt notat cu C, care realizeaz o vitez
maxim Vmax = 40 m/s = 144 km/h. Limita de aderen este identic la ambele
automobile.
Pentru o alt variant B, se consider c limita de aderent este mai joas, ns
puterea este identic ca la varianta A. Cu ajutorul figurilor 6.17. b) i 6.17. c) s-a
obinut diagrama vitez-timp, artat n figura 6.17. b), din care se desprind
urmtoarele: curbele vitez-timp se apropie de valoarea asimptotei Vmax.
Deoarece aceast valoare este mai mare pentru automobilul A dect pentru
automobilul C, nseamn c automobilul B va accelera mai bine dect automobilul
C, adic automobilul A va accelera mai bine dect automobilul C, adic
automobilul A i mrete viteza cu o anumit mrime, ntr-un timp mai scurt dect
automobilul C. De aici concluzia c automobilul care este conceput s realizeze o
vitez maxim mai mare, va avea i capacitatea de accelerare mai bun. Aceast
afirmaie, care conform celor specificate mai sus este valabil pentru automobilele
echipate cu motoare cu caracteristici apropiate de cele ideale, este configurat dup
cum arat figura 6.18. i de automobilele echipate cu motoare cu ardere intern
combinate cu transmisii mecanice n trepte.
Aceast constatare nu
este valabil i n domeniul
vitezelor mici, n cazul
exemplului dat ntre 0... 8 m/s,
ntruct n acest domeniu nu
puterea este determinant ci
limita impus de aderen,
cazul automobilelor notate cu
A i C.
Dac se compar
automobilul A cu B, se
observ c la ambele fore de
traciune are aceeai valoare
n domeniul cuprins ntre 23 i
50 m/s, i valori diferite n
domeniul cuprins ntre 0 i 23
m/s. Automobilul B
accelereaz din aceast cauz
mai ncet la viteze mici dect
automobilul A. Dac se
compar automobilul B cu
automobilul C, deci
automobile cu limite de
t
(
d
e
l
a
0
.
.
.
1
0
0
k
m
/
h
)
150 0
D
5
10
100
15
20
[s]
30
t
25
Vmax [km/h]
200 250
Fig.6.18. Timpul de demarare
Capacitatea de micare a automobilelor 111
aderen diferite i cu puteri diferite, rezult c automobilul C, cu limita de
aderen mai ridicat n domeniul vitezelor mici este superior automobilului B, n
timp ce la viteze mari este mai bun automobilul B care are o putere mai mare.
Aceast tendin se observ i n figura 6.17. c), unde este artat dependena dintre
spaiul i timpul de demarare. Pentru valorile de timp mai mari curbele de spaiu se
apropie de panta de Vmax. Automobilele B i C, care ating n medie 7 secunde la
viteze identice, parcurg aceeai distan numai dup 13 s, sau altfel spus, ambele
automobile accelereaz de la 0 pn la 20 m/s n aproximativ acelai timp circa 7
secunde; ns, automobilul C a parcurs n acest timp o distan cu 25m mai mare
dect automobilul B, cu toate c acesta va recupera i pn la urm va depi
automobilul C.
6.4.3. Rapoartele de transmitere n treptele intermediare ale cutiilor de
viteze
Pornind de la caracteristica ideal a momentului motor, se va trece la condiiile
existente, oferite de motoarele cu ardere intern, combinate cu transmisii mecanice
n trepte i se va analiza un cmp de caracteristici ale forei de traciune
corespunztoare figurii 6.15.
Fig.6.19. Influnea volorilor raportelor de transmitere asupra performanelor
Modificarea valorii raportului din treapta a II-a de vitez
140
dv
20
0.5
0
0
[m/s ]
1.5
1.0
2.5
2.0
dt
80 40 60 120
V [km/h]
100
b)
A
100
a)
0
50
3.0
150
200
250
B
2
[daN]
F
450
t
400
300
250
B i =2.06 2
C
2
2
4
Rr +Ra
C i =1.70
3
Raportul de transmitere
din treapta a 2-a variaza 1
A i =2.50
[m]
x
250
0
0
20 10 30
750
500
1000
1250
d)
70
t [s]
50 40 60
Raportul de transmitere
din treapta a 2-a variaza
Vmax
30
1500
0
15
60
45
75
c)
V
135
[km/h]
105
90
120
2
2
2 2
2
2
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 112
Dup cum s-a mai menionat, dintre treptele de vitez, ultima treapt este
conceput pentru asigur viteza maxim necesar, iar prima treapt este conceput
din necesitatea urcrii unei anumite pante maxime. Vitezele intermediare n cazul
unei cutii de viteze cu patru trepte, sunt viteza n treapta a 2-a i viteza n treapta a
3-a. Acestea se concep n funcie de necesitatea de demarare.
Pentru a avea o privire de ansamblu asupra efectului vitezelor intermediare, se
va analiza cazul unei cutii de viteze cu 4 trepte, la care odat se modific raportul
de transmitere din treapta a 2-a (fig. 6.19.) i alt dat se modific raportul de
transmitere din treapta a 3-a (fig. 6.20.).
Fig.6.19. Influnea volorilor raportelor de transmitere asupra performanelor
Modificarea valorii raportului din treapta a III-a de vitez
n figurile a sunt artate trei raporturi de transmitere diferite A, B i C pentru
care s-au trasat curbele de dependen acceleraie vitez n figurile b.
Aa cum se tie, pentru aprecierea capacitii de accelerare se poate folosi
timpul necesar pn la atingerea unei anumite viteze, sau parcurgerea unei anumite
distane ntr-o anumit unitate de timp; cea de-a doua modalitate se va folosi i n
analiza de fa, fiind mai util. Dac avem n vedere modul conducere n orae, pe
osele i pe autostrzi ne dm uor seama c testul de 1 km parcurs de la pornirea
de pe loc nu are un rol important. La semafoare se ncearc s se ncearc s se
parcurg pornind din staionare pn la o anumit limit de vitez (ex. 50 km/h) o
120
105
V
[km/h]
135
c)
75
45
60
15
0
30
90
Raportul de transmitere
din treapta a 3-a variaza
Vmax
70 60 40 50
t [s]
d)
[m]
1000
1250
750
500
30 10 20
0
0
250
1500
x
A i =1.80
1
Raportul de transmitere
din treapta a 3-a variaza
3
3
C i =1.00
Rr +Ra
C
3
2
3 A
4
B
B i =1.06
t
400
250
450
F
[daN]
150
200
250
a)
0
50
100
300
b)
100 120
V [km/h]
60 40 80
2
dt
2.5
2.0
1.0
1.5
[m/s ]
0
0
0.5
20
dv
3.0
140
3
3
3
3
3
3
Capacitatea de micare a automobilelor 113
distan ct mai mare, adic s se plaseze ct mai n faa celorlali participani la
traficul rutier. Aceast distan este practic ncheiat sub limita de 1 km. Mult mai
important este ns s existe posibilitatea unei depiri rapide, adic n condiiile
actuale de circulaie cu o densitate de automobile foarte mare, se urmrete ca un
automobil s poat urma alt automobil cu aceeai vitez i apoi s accelereze pn
n situaia n care condiiile de trafic i permit s execute manevra de depire pe o
distan ct mai mic.
Fig.6.21. Valorile rapoartelor de transmitere
1
2
3
4
5
i/i
3
3
i /i 2
i /i 1 3
Autoturisme cu 3 trepte de viteza
Autoturisme
fabricate in
S.U.A.
Autoturisme cu 4 trepte de viteza
4
i/i
9
10
1 i /i
2 i /i
3 i /i 4
4
4
1
3
2
4
8
5
6
7
d)
a)
5
i /i
i /i
i /i
1
2
3
4
3 4
2 4
1 4
4
6
i/i
Autoturisme cu 4 trepte de viteza
9
1
i /i
i /i
4
2
3
5
5
6
4
i /i
3
2 5
5
i /i 1
7
5
8
11
i/i 5
10
Autocamioane cu 5 trepte de viteza
d) b)
4
1
0
2
3
5
i/i
6
5
c)
130
Autoturisme cu 5 trepte de viteza
4 5
i /i 3 5
i /i 2 5
i /i 1 5
290
Vmax [km/h]
170 210 250
1
0 4 8 12
Ga [kN]
16 20
i /i
i /i 5
i /i 4
3
i /i 2
1 i /i
Autocamioane cu 6 trepte de viteza
7
2
3
5
4
6
10
8
9
11
i/i 6
6
6
6
6
6
f)
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI 114
Viteza iniial poate s fie diferit; n orae sub 50 km/h, iar pe autostrzi i pe
osele mult mai mare. Cele trei trepte de vitez artate n figurile 6.19. i 6.20. dau
rezultate diferite n funcie de situaiile de trafic concrete. Pentru pornirea din loc i
viteze mai mici sunt mai bune (potrivite) transmisiile cu rapoarte de transmitere A
2
i A
3
. n schimb transmisiile cu rapoartele C
2
i C
3
sunt avantajoase pentru
accelerarea la viteze mai mari; de exemplu cu transmisia C
3
se poate efectua
accelerarea de la 70 la 110 km/h n numai 23 de secunde, n timp ce, cu transmisia
A
3
, pentru aceeai performan sunt necesare24 de secunde.
Aceast diferen de 1 secund, nu este semnificativ din punct de vedere al
timpului nregistrat, ns pentru o manevr de depire diferena de distan
parcurs este de aproximativ 75 m, ceea ce este destul de mult. Transmisia cu
raportul B reprezint un compromis avantajos ntre variantele A i C. Trebuie s se
in seama i de influena gradului de ncrcare a automobilului asupra capacitii
de accelerare.
Un punct de pornire n proiectare automobilelor l poate oferi datele cuprinse
n graficele din figura 6.21. Se poate afirma c n general, transmisiile cu mai
puine trepte n cutiile de viteze mresc golurile de acceleraie n raport cu
hiperbola ideal a forei de traciune i deci sunt mai puin avantajoase.
n cele din urm trebuie reamintit cazul 2 din figura 6.10. cu ajutorul creia s-a
explicat c i prin conceperea ultimei trepte din cutia de viteze, capacitatea de
accelerare a unui automobil se poate mri, ns, cu realizarea unei viteze maxime
de valoare mai redus, la turaii mai mari ale motorului i ca urmare cu un consum
de combustibil mai ridicat.
Tabelul 6.2.
Sistemul Durate de cuplare
Accelerare intermediar +
Cuplare dubl cu sistem de sincronizare
2.6 [s]
0.8 [s]
6.4.4. ntreruperea forei de traciune
n timpul schimbrii treptelor din cutia de viteze se ntrerupe transmiterea
fluxului de putere de la motor la roile motoare, adic nu se mai furnizeaz un
moment la roi, n schimb rezistenele la naintare rmn active.
n aceast situaie este valabil expresia:
Rp Ra Rr
t
v
g
Ga
r
M
d
R
+ + + = =
d
d
0
Dar n astfel de situaii, automobilul va fi decelerat:
Capacitatea de micare a automobilelor 115
( ) Rp Ra Rr
g Ga t
v
+ +
=
1
d
d
(6.44)
iar n cazul deplasrii pe orizontal:
|
.
|
\
|
+
=
2
2
1 1
d
d
v A Cx Ga f
g Ga t
v
(6.45.)
La viteze de deplasare mai mici, deceleraia este aproximativ constant,
deoarece rezistena aerului este neglijabil, iar n cazul vitezelor mai ridicate
decelerarea devine din ce n ce mai mare. Din aceast cauz, cuplarea treptelor de
vitez nu trebuie s se fac la prea mari, pentru c la aceste viteze i turaia
motorului este mare, iar momentul excedentar descrete continuu. De fapt,
momentul motor la roile motoare nu este zero, ci este negativ, deoarece, chiar i
atunci cnd motorul este decuplat rmn active pierderile de energie cinetic n
transmisie, cu efect de moment de frnare.
n tabelul 6.2. sunt specificate valorile orientative privind durata de schimbare
a treptelor din cutia de viteze.
7
CONSUMUL DE COMBUSTIBIL
Dac un automobil parcurge o anumit distan L, pentru echilibrarea
rezistenelor la naintare, trebuie s se debiteze de ctre motor un lucru mecanic A
exprimat prin momentul motor la roile motoare M
R
i deplasarea unghiular a
roilor motoare
R
respectiv :
=
r
r L
R R
M A
0
d (7.1)
n care r
r
este raportul de rulare a roilor motoare; cu x = r
r
r
, innd seama de
relaia (4.23) i de fora la roat F
R
dat de relaia (4.17) se (obine) consum pentru
parcurgerea distanei L, lucrul mecanic
=
L
R
r
d
dx F
r
r
A
0
(7.2)
n care r
d
este raza dinamic a roilor.
Lucrul mecanic este produs prin arderea combustibilului adecvat tipului de
motor folosit pentru antrenarea automobilului. Uzual, energia combustibilului se
exprim prin cantitatea de combustibil (Q)- n kg sau litri i valoarea caloric H n
kcal/kg sau kcal/l. La transformarea energiei n lucru mecanic apar pierderi
exprimate printr-un randament. Se specific dou feluri de randament :
randamentul efectiv al motorului
e
care exprim pierderile ce se nregistreaz la
transformarea energiei combustibilului n lucru mecanic i randamentul transmisiei
t
, care exprim pierderile de lucru mecanic ce se produc n transmisie, adic de la
ieirea fluxului de putere din motor pn la roile motoare. Deci
t e
H Q A = (7.3.)
Cantitatea de combustibil consumat Q se raporteaz la distana L care se
calculeaz cu relaia:
=
L L
t v n L
0 0
d d (7.4)
i consumul obinut prin raportul Q/L, msurat de regul n l/100 km se calculeaz
dup cum urmeaz:
x F
r
r
L H L
Q
R
L
o
r
d
t e
d
1 1
= (7.5)
n cazul deplasrii automobilului cu vitez constant , respectiv i fora la roat
F
R
constant, atunci conform relaiei (4.17) se obine
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
116
(
+ +
= + +
=
=
2
2
1
) (
) (
) (
v A c G p f
H
r r
R R R
H
r r
H
F r r
L
Q
x a
t e
r d
a p r
t e
r d
t e
R r d
(7.6)
Dac se consider c celedourandamente sunt constante, consumul de
combustibil este proporional cu rezistenele la naintare aa cum se observ i n
figura 7.1. Aceasta nseamn c pentru a
consuma ct mai puin combustibil, trebuie
ca rezistena la rulare i rezistena aerului
s fie ct mai mici i randamentele s fie
ct mai ridicate.
Randamentul efectiv al unui motor bun
reprezint aproximativ
e
0,3 innd
seama de faptul c o treime din puterea
caloric a combustibilului se pierde n
sistemul de rcire i o alt treime se pierde
odat cu gazele arse din eapament; deci
numai aproximativ o treime din cantitatea
de cldur produs prin arderea
combustibilului se transform n lucru
mecanic . Randamentul transmisiei care
exprim pierderile de putere n transmisie
este mult mai mare i n cazul transmisiilor mecanice n trepte acest randament este
mai mare de 0,8 deci
t
>0,8.
n continuare se va prezenta un
exemplu numeric ce se refer la un
autoturism cu datele cunoscute:
G
a
= 1000 daN; f = 0,015; p = 0;
=1,225 g/m
3
; c
x
A = 0,8 m
2
; v = 20
m/s (72 km/h);
e
= 0,3;
t
= 0,8; H =
7300 (kcal/l) ; r
d
/r
r
1.
km l m l
L
Q
100 / 9 , 4 / 10 9 , 4
427 7300 8 , 0 3 , 0
225 , 1 400 8 , 0 1000 015 , 0
5
= =
+
=
n figura 7.1. este prezentat
variaia consumului de combustibil
n l/100 km pentru diferite mrimi ale
pantei n funcie de viteza de
deplasare a automobilului.
L
V
p
Q
Fig.7.1. Consumul de combustibil
n
M
consum
specific
M
P
M
M
Fig.7.2. Caracteristica motorului
Consumul de combustibil
117
Calculul consumului de combustibil este ngreunat , chiar n cazul deplasrii
cu vitez i for de traciune constante, deoarece randamentele nu sunt constante ci
sunt variabile n funcie de sarcin, de viteza de deplasare i de turaie .Variaia cea
mai mare o nregistreaz randamentul efectiv al motorului
e
, variaie ce
influeneaz sensibil consumul de combustibil.
Caracteristica motorului este
artat n figura 7.2,n care momentul
M
M
este reprezentat n funcie de
turaia motorului n
M
(linii ntrerupte)
pentru cazul cnd puterea motorului
este constant (P
M
= constant). Tot n
aceast figur sunt trasate i curbele
de echiconsum- adic curba care
reprezint consumul specific de
combustibil constant ( c
e
= constant )
msurat n gr/CP or sau gr/kw or.
Dac nu se ine seama de
influena randamentului transmisiei
adic
t
1 i se transpune cmpul
caracteristicilor motorului peste
caracteristica de traciune (cmpul de
caracteristic) a unui automobil cu
transmisie n trepte, rezult figura 7.3.,
n care, practic, cu excepia scrii de reprezentare nu s-a modificat nimic la curbele
de echiconsum. Cmpurile caracteristicilor de echiconsum, sunt greu de evaluat,
din care cauz ele trebuie s fie
recalculate n valorile Q/L prezentate
mai nainte, respectiv:
cm g
v
h km
CP
P
h CP g
c
km l
L Q
R e
3
/ /
/ 10
1
100 /
/
=
n care reprezint greutatea specific
a combustibilului. Rezultatul,
recalculat n l/100 km este prezent n
figura 7.4.
Variaia consumului de combustibil
Q/L n raport cu viteza de deplasare
pentru cazurile cnd randamentul
efectiv al motorului este constant
e
=
constant (linii ntrerupte) i pentru
V
consum
specific
P
R
M
R
Fig.7.3. Cmpul de caracteristici
V
L
Q
r (R + R )
r d a
M
R
Fig.7.4. Consumul de combustibil
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
118
cazurile cnd randamentul (
e
constant - cu linie continu) motorului este
variabil e reprezentat n figura 7.5.
Dac se compar figurile 7.5. i 7.1(la care randamentul efectiv al motorului i
deci consumul specific de
combustibil erau constante)
rezult c pentru cazul
e
=
constant, consumul de
combustibil a crescut odat cu
creterea vitezei de deplasare a
automobilului datorit creterii
rezistenei aerului, pe cnd
pentru cazul
e
constant , la
anumite valori ale vitezei de
deplasare corespunztoare unei
trepte din cutia de viteze se
nregistreaz un minim al
consumului de combustibil Q/L
(fig. 7.5. curba cu linie
continu).
Din figura 7.6. se poate
deduce n care anume treapt a
cutiei de viteze este indicat s se efectueze deplasarea. Sunt prezentate aici
diferenele dintre consumurile
nregistrate n treapta a doua i
a treia din figura 7.4. i s-au
haurat domeniile respective.
n zona de viteze haurat este
posibil s se efectueze continu
acceptabil att n treapta a 2-a,
ct i a 3-a. Deplasarea cu
vitez mai redus determin n
sine un consum mai mare de
combustibil , aa cum indic
cmpurile din figura 7.6. n
concluzie , se poate spune c,
n general, cu ct consumul de
combustibil se dorete s fie
mai redus , cu att mai mult
trebuie s se ruleze cu vitez
maxim. (jante).
n figura 7.7 este artat
schematic modul de selectare
M
R
V
y = constant
e
y = constant
e
Fig.7.5. Variaia consumului de combustibil
M
R
Deplasarea in
treptele 2 si 3 este
posibila
consum mai
mare in tr. 2-a
2...3 l/100
km
3...4 l/100
km
tr 2
V
tr 3
Fig.7.6. Alegerea regimului de mers
Consumul de combustibil
119
n paralel economic i neeconomic a treptelor din cutia de viteze a unui
automobil cu transmisie mecanic.
n continuare, sunt prezentate dependenele dintre consumurile de combustibil
i sarcin pentru diferite valori ale vitezei de deplasare . n figura 7.8. este artat
variaia consumului standard de combustibil n funcie de sarcin pentru
autocamioane. Dat fiind faptul c toate autocamioanele au aceeai vitez maxim
urmare a unor limitri ale traficului este identic i viteza la care se msoar
consumul de combustibil. Ca urmare, mrimea consumului de combustibil depinde
numai de greutatea G
a
, coeficientul rezistenei la rulare f, de coeficientul de
rezisten a aerului c
x
, de aria seciunii transversale a automobilului i bineneles
de randamentul efectiv al motorului
e
i de randamentul transmisiei
t
i de
puterea calorific a combustibilului.
neeconomic
1
2
3
M
R
3
1
V
4
2
R
M
economic
4
V
Fig.7.7. Modul de selectare a treptelor n cutia de viteze
6000
8
10
12
14
4000 2000
24
20
18
16
22
28
B/L
[l/km]
26
10000
al unui autocamion
consumul standard
8000 12000
Ga [daN]
Fig.7.8. Consumul autocamioanelor
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
120
Aa cum rezult din figura 7.8. i din transformarea relaiei 7.6. prin considerarea
r d
r r = 1 i p = 0, respectiv:
|
|
.
|
\
|
2
2
v
G
A c
f
H
G
L
Q
a
x
t e
a
(7.7.)
Consumul de combustibil Q/L raportat la drumul parcurs este aproximativ
proporional cu greutatea automobilului G
a
.
n cazul autoturismelor, vitezele maxime sunt foarte diferite i n plus standardul
impune ca msurarea s nu se fac la viteze mai mari de v 110 km/or. Din
aceast cauz pentru autoturisme, nu se poate vorbi despre o legtur a consumului
de combustibil cu viteza maxim (v
max
) i nici de o dependen liniar a
consumului de combustibil fa de greutatea autoturismelor G
a
- aa cum se arat n
figura 7.9. Acest lucru se datoreaz faptului c la autoturismele mai uoare n
general mai ncete msurarea consumului de combustibil se face la din viteza
maxim, n timp ce la autoturismele mai grele , cu viteze maxime mai mari ,
msurarea se efectueaz la 110 km/or, ceea ce reprezint mai puin de din
viteza maxim. De asemenea la autoturisme preponderent este rezistena aerului ,
care, practic nu depinde de masa automobilului, deoarece seciunea transversal nu
e proporional cu aceasta.
Trebuie fcut precizarea c la deplasarea automobilelor cu vitez variabil ,
consumul de combustibil este mai mare dect cel standardizat i aa cum arat
liniile mediane ale consumului msurat i ale consumului standard, majorarea este
aproximativ 34 l/100 km, iar n cazul autoturismelor care realizeaz viteze mai
ridicate, aceast diferen este chiar mai mare.
4
8
12
16
20
1200 1000 800 1600 1400 1800
Ga [daN]
B/L
[l/km]
consumul masurat la
autoturisme
consumul standard la
autoturisme
Fig.7.9. Consumul autoturismelor
8
LIMITAREA DE CTRE ADEREN A CAPACITII
DE MICARE A AUTOMOBILELOR
Dupa cum s-a explicat n cadrul capitolului 1, reaciunea tangenial maxim
max
X este limitat de aderen i c roata ruleaz numai atunci cand reaciunea
tangeniala este:
.
Deci, pentru a ti ct de mare poate s devin reaciunea tangenial, trebuie s
se cunoasc noiunea normal Z i coeficientul de aderen pe care l-am studiat
n capitolul 1.
8.1. Reaciunile normale dintre roi i calea de rulare
Marimea lui
1
i
2
- reprezentnd reaciunile normale pe puntea din fa
respectiv din spate, n cazul unui automobil cu dou puni, se calculeaz din
ecuaiile de echilibru cunoscute din analiza capitolului 4. Conform ecuaiei 4.5 se
obine:
G G Z
r R
cos
1 1 1
+ =
G
1
R
rezult din ecuaiile (4.2) i (4.3) dup cum urmeaz:
( ) ( ) ( ) g c M r h F F M M b P b G L G
a g R R a a R
r
+ + +
=
2 1 2 1
cos
Dac se ine seama de relaiile (4.1), (4.11) i (4.10) i se organizeaz n mod
corespunztor, expresia de mai sus devine:
( ) | | .
d
d
d
d
sin
d
d 1
cos
2 2 1 1
2 1
1
|
|
.
|
\
|
+ +
|
|
.
|
\
|
+ + +
+ =
t
r
I
t
r
I
R r a
t
v
g
r G G h G
h R M b P b G L G
R R R R
r r r g a
g a c a a a R
g
Prin urmare pentru reactiunea normala la puntea din fata
1
R
Z rezulta:
( )
( ) | |
|
|
.
|
\
|
+ +
|
|
.
|
\
|
+ + +
+ + =
t
r
I
t
r
I
R r
t
v
g
r G G h G
h R M b P b G L G L Z
R R R R
r r r g a
g a c a a a R R
g
d
d
d
d
sin
d
d 1
cos
2 2 1 1
2 1
1 1
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
122
Unele expresii din relatia (8.1) se pot simplifica, daca n locul centrelor de
greutate
1
,
R g
c c i
2
R
c se introdoce unul singur:
g
c . Poziia acestui centru rezult n
conformitate cu figura 8.1 astfel:
( ) r G G h G h G
r r g a g a
+ + =
2 1
(8.2)
b G L G b G
a r a
+ =
1
(8.3)
a G L G a G
a r a
+ =
2
(8.4)
Fig.8.1. Modelul de calcul
Dac se introduc aceste expresii n relaia (8.1) se obine:
|
|
.
|
\
|
+ +
|
|
.
|
\
|
+
+ =
t
r
I
t
r
I
R r
t
v
g
h G h R
M b P b G L Z
R R R R
r g a g a
c a a a R
g
d
d
d
d
sin
d
d 1
cos
2 2 1 1
1
Din aceast relaie se poate extrage componenta static (
Rist
Z ) a reaciunii
normale la puntea din fa.
(
=
L
h
L
b
G Z
g
a st R
sin cos
1
(8.5)
De asemenea se poate simplifica relaia i prin gruparea mrimilor ce se refer
la rezistena aerului - ) ( g h R g c M b P
a a
+ adic:
g a c a a a
h R M b P L P
g
+ =
1
(8.6)
care reprezinta de fapt componenta forei portante ce acioneaz la puntea din fa.
Coeficientul de portan aerodinamic
1
a
c ia valori cuprinse intre 0,015 i
+0,241. Daca se au n vedere relaiile (8.5) i (8.6) i se inlocuiesc acceleraiile
L
a b
a' b'
hg'
hg
Cr Cr
Cg'
Cg
Ga
Ga'
1
2
Gr1
Gr
2
r
Limitarea de ctre aderen a capacitii de micare a automobilelor
123
unghiulare
t
R
d
d
1
si
t
R
d
d
2
cu acceleraia n micare de translaie
2
2
d
d
t
v
i se ine
seama c
r R
r v = atunci sarcina vertical pe puntea din fa devine:
r
F
R
F
R g
a
a st R R
R
L
r
t
v
L r
I
L r
I
L
h
g
G
P Z Z
(
(
+ =
d
d
2
2
1
1
1 1 1
(8.7)
Sarcina normal ce revine punii din spate se poate determina fie asemntor
cu cea a punii fa, fie mai simplu conform figurii 4.1 din ecuaia de echilibru a
forelor ce acioneaz perpendicular pe calea de rulare.
P G Z Z
a R R
= + cos
2 1
(8.8)
din care se obine:
r
r
R
r
R g
a
a st R R
R
L
r
t
v
L r
I
L r
I
L
h
g
G
P Z Z +
(
(
+ + + =
d
d
2
2
1
1
22 2 2
(8.9)
i
(
+ =
L
h
L
a
G Z
g
a st R
sin cos
2
(8.10)
Din relaiile (8.7) i (8.9) rezult c rezoluiile normale la punile
automobilului dac unghiul pantei 0 = , depind de sarcina static i de parametrii
(poziia) centrului de greutate n direcia longitudinal, respectiv de raporturile
L
a
i
L
b
n cazul deplasrii automobilului pe pant, sarcina ce revine puntii fa se
reduce din cauza expresiei:
L
h
g
sin sau aproximativ tg
L
h
g
, respectiv p
L
h
g
,
n timp ce sarcina ce revine punii din spate se marete cu aceeai valoare.
La coborrea unei pante situaia este invers. Se observ deci c trebuie s se
in seama de nalimea centrului de greutate i ampatamentul automobilului. n
acelai timp sarcinile pe puni sunt influenate i de fora portant a aerului care
tinde s le micoreze. Micorarea aceasta crete odata cu creterea vitezei de
deplasare i cu aportul vntului care sufl lateral.
Dup cum se tie, n timpul demarajului sarcina pe puntea din fa se reduce i
pe puntea din spate se mrete. Creterea, respectiv descreterea, sarcinilor pe
punile automobilului sunt determinate de dou componente; una din cauza
acceleraiei masei n miscarea de translaie
t
v
L
h
g
G
g
a
d
d
i cealalt din cauza
acceleraiei maselor n miscare de rotaie, concretizate de momentele de inerie
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
124
i
R
I si
2
R
I . n relaiile (8.7) i (8.9) ntlnim i rezisenta la rulare, dar influena
acestei fore este nesemnificativ din punct de vedere valoric.
Acest lucru rezult i din urmtorul exemplu numeric:
0
d
d
=
t
v
; L=0 ; daH G
a
1550 = ; 0 =
L
B
;
50 , 2
3 , 0
=
L
r
f=0,015
daH daH daH Z
R
8 , 1 550 1550
50 , 2
3 , 0
500
2
+ = + =
Prin urmare, expresia
r
R
L
r
din ecuaiile (8.7) i (8.9) se poate neglija.
8.2. Reaciunile tangeniale i fora tangenial specific
Se va analiza cazul antrenrii, urmnd ca frnarea s fie studiat n capitolul
urmtor. Se ia cazul unui automobil cu o singur punte motoare al crui moment la
roile motoare se calculeaz cu relaia:
2
2
1
d
d
v A c
t
v
g
p f G R R R R
r
M
F
x a d a p r
d
R
R
+
(
+ + = + + + = =
i pentru antrenarea punii din fa devine:
R R
M M =
1
0
2
=
R
M
respectiv pentru antrenarea punii din spate:
0
1
=
R
M
R R
M M =
2
Cu aceste momente se pot calcula din ecuaiile (4.6) i (4.9) rezoluiile
tangeniale
1
X i
2
X :
1
1 1
d
d
1 r
R
d
R
d
R
R
t
r
I
r
M
X = ,
2
2 2
d
d
2 r
R
d
R
d
R
R
t
r
I
r
M
X =
Daca se cunoate una din cele dou reaciuni tangeniale, cealalt se poate
obine cu ajutorul ecuaiei (4.10), respectiv:
a p
a
a a
R R
t
v
g
G
R p
t
v
g
G X X + + = +
(
+ = +
2
2
2
2
2 1
d
d
d
d 1
(8.14)
Limitarea de ctre aderen a capacitii de micare a automobilelor
125
Tabelul 8.1
Puntea din fa
Punte motoare fa Punte motoare spate
Reaciunile normale
Sarcinile normale statice
2
2
d
d
2
2
1
1
1 1 1
t
x
L r
I
L r
I
L
h
g
G
P Z Z
r
R
r
R g
a
a R R
st
(
(
+ =
(
= p
L
h
L
b
L
h
L
b
G Z
g g
a R
st
sin cos
1
Reaciunile tangeniale
1
1
1
R
Z
X
=
1
1
1
R
Z
X
=
Forta tangeniala specific pentru
cazul
=
=
0
, 0
d
d
2
2
p
t
x
1 1
2
2
1
2
1
a R
x r
P Z
V A c R
st
+
=
1 1
2
1
a R
r
P Z
R
st
=
Forta tangenial specific de
valoare aproximativ
st
R
x r
Z
V A c R
1
1
2
1
2
1
+
0
1
f
Fora tangenial specific pentru
cazul 0
d
d
2
2
=
t
x
, vitez mic
( ) 0
i
a
P i ( ) 0
a
R
r
R
neglijabil
p
L
h
L
b
p
g
0
1
Fora tangenial specific pentru
cazul micrii accelerate i
0 = p , vitez mic 0
a
R ,
r
R neglijabil
2
2
1
2
2
1
d
d
d
d
1
1
t
x
L r
I
n G
t
x
g
G
r
R
a
a
=
2
2
1
d
d 1
t
x
g L
h
L
b
n
g
=
0
1
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
126
Tabelul 8.2
Puntea din spate
Punte motoare fa Punte motoare spate
Reaciunile normale
Sarcinile normale statice
2
2
d
d
2
2
1
1
2 2 2
t
x
L r
I
L r
I
L
h
g
G
P Z Z
r
R
r
R g
a
a R R
(
(
+ + =
(
+
(
+ = p
L
h
L
b
L
h
L
b
G Z
g g
a R
st
sin cos
2
Reaciunile tangeniale
2
2
1
R
Z
X
=
2
2
1
R
Z
X
=
Forta tangeniala specific pentru
cazul
=
=
0
, 0
d
d
2
2
p
t
x
2 2
2
1
a R
r
P Z
R
st
=
2 2
2
2
2
2
1
a R
x r
P Z
V A c R
st
+
=
Forta tangenial specific de
valoare aproximativ
0
2
f
st
R
x r
Z
V A c R
2
2
2
2
2
1
+
Fora tangenial specific pentru
cazul 0
d
d
2
2
=
t
x
, vitez mic
( ) 0
i
a
P i ( ) 0
a
R
r
R
neglijabil
0
2
p
L
h
L
b
p
g
+
Fora tangenial specific pentru
cazul micrii accelerate i
0 = p , vitez mic 0
a
R ,
r
R neglijabil
0
2
2
2
2 1
2
2
2
d
d
d
d
1
1
t
x
L r
I
n G
t
x
g
G
r
R
a
=
2
2
1
d
d 1
t
x
g L
h
L
b
n
g
+ =
n cazul automobilelor cu puntea motoare dispus n spate, reaciunea
tangenial la puntea din fa nemotoare se calculeaz cu expresia:
Limitarea de ctre aderen a capacitii de micare a automobilelor
127
1
1
1
1
1 1
2
2
1
d
d
d
d
r
d r
R
r
R
d
R
R
t
v
r r
I
R
t r
I
X
= =
(8.15)
Deci, reaciunea tangenial la roile nemotoare este compus din rezistena
opus de ineria maselor roilor nemotoare (n micare de rotaie) ( )
t
r I
R
d R
d
d
/
1
1
si rezistenta la rulare a acestor roti
1
r
R .
Reaciunea tangenial la roile motoare ale punii din spate se obine din
relaia (8.14), adic:
1
1
1
2
2
2
2
2
1
2
2
2
d
d
2
1
d
d 1
d
d
r
r d
R
x a
a p
a
R
t
v
r r
I
V A c p
t
v
g
G
X R R
t
v
g
G
X
+
+ +
(
+ =
= + + =
(8.16)
Din relaia (8.16), se observ c reaciunile tangeniale la roile motoare sunt
formate prin nsumarea: rezistenei aerului, rezistenei la urcarea pantei, rezistenei
la accelerarea masei n micare de translaie
|
|
.
|
\
|
=
2
2
2
2
d
d
d
d
t
v
m
t
v
g
G
a
a
i a reaciunii
tangeniale a roilor punii nemotoare -
1
1
1
2
2
1
d
d
r
d r
R
R
t
v
r r
I
X +
= . Tot din relaia
(8.16) rezult c reaciunea tangenial
2
X nu depinde de influena maselor n
micare de rotaie a roilor motoare ( )
2
2
d
d
/
2 2
t
v
r r I
d r R
i de rezistena la rulare a
acestor roi
2
R
R . Aceasta reprezint deosebirea dintre reaciunea tangenial
2
X i
fora la roile motoare
d R R
r M F / = ce se calculeaz cu relaia cunoscut:
r
r d
R
r d
R
d
R R
d
R
R
R
t
v
r r
I
r r
I
X X
r
M M
r
M
F +
(
(
+ + =
+
= =
2
2
2 1
d
d
2
2
1
1 2 1
(8.17)
Pentru a pune n eviden influenele care ne-au aprut n relaia (8.16),
calculm reaciunea
2
X din relaia (8.17):
r
d r
R
d r
R
R
R
t
v
r r
I
r r
I
X F X
(
(
=
2
2
1 2
d
d
2
2
1
1
i prin nlocuirea lui
1
X cu expresia care o definete din relatia (8.15) se obine:
2
2
2
2
2
2
d
d
r
r
R
R
R
t
v
r
I
F X = (8.18)
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
128
Cunoscnd reaciunile normale i tangeniale se poate calcula fora tangenial
specific. Fora tangenial specific la roile din fa, nemotoare, deci la
automobilele cu puntea motoare dispus n spate este:
2
2
2
2
1
1
d
d
.
d
d
2
2
1
1
1 1
1
1
1
1
t
v
L r
I
L r
I
L
h
g
G
P st Z
R
t
v
r r
I
Z
X
r
R
r
R g
a
a R
r
d r
R
R
(
(
+
= = (8.19)
iar pentru roile punii din spate motoare :
2
2
2
2
2
2
2
d
d
.
2
1
d
d
2
2
1
1
2 2
1
1
1
2
t
v
L r
I
L r
I
L
h
g
G
P st Z
V A c R p G
t
v
r r
I
g
G
Z
X
r
R
r
R g
a
a R
x r a
r d
R
a
R
(
(
+ +
+ + +
(
(
+
= =
(8.20)
Relaiile obinute n cazul automobilelor cu punte motoare dispus n fa sunt
prezentate n tabelul 8.1 cu unele simplificari.
Valoarea forei tangeniale specifice la roile nemotoare este mult mai mic
dect cea de la roile motoare, din care cauz de cele mai multe ori se neglijeaz.
De asemenea se poate neglija i momentul forelor de inerie al roilor nemotoare.
n plus, s-au mai simplificat expresiile pentru reaciunile normale
( ) p tg = sin , 1 cos ceea ce pentru drumurile uzuale este admisibil.
n continuare se va proceda la evaluarea relaiilor determinate mai nainte
pentru cazurile: deplasarea pe o cale orizontal 0 = , deplasarea pe o cale
nclinat 0 i pentru deplasarea cu vitez variabil, adic accelerat.
8.2.1. Cazul deplasarii automobilului cu viteza constanta pe un drum orizontal
Reaciunea sau fora tangenial specific crete odata cu creterea vitezei de
deplasare ceva mai mult dect cu ptratul acesteia, deoarece sarcina pe punte se
reduce ca urmare a efectului forei portante de natura aerodinamica.
n figura 8.2 se arat efectul forei portante i a efectului de deriv asupra
forei tangeniale specifice n cazul unui automobil care are puntea motoare dispus
n spate. Din figur rezult c mrimea forei tangeniale specifice este relativ mic
la vitezele de deplasare uzuale ale automobilului, astfel nct aceast stare de mers
nu prezint importan pentru patinarea roilor motoare. Nu acelai lucru se poate
spune n cazul deplasrii unui automobil pe drumuri acoperite de polei sau de
zpad bttorit la viteze de aproximativ 150 km/h.
Dac ns, vitezele cresc la 300 km/h i chiar mai mari, atunci forele
tangeniale specifice devin atat de mar nct se poate depi chiar coeficientul de
aderen pe un drum uscat.
Limitarea de ctre aderen a capacitii de micare a automobilelor
129
Figura 8.2.b ne arat o posibilitate de reducere a forei tangeniale specifice,
adic printr-o modificare a formei aerodinamice a caroseriei sa apar, n locul
efectului de portan, o sporire a sarcinii verticale pe roat. Acelai efect se obine
prin deplasarea centrului de greutate n aa fel nct s se solicite mai mult puntea
motoare de sarcin vertical i prin reducerea rezistentei aerului n raport cu sarcina
vertical a punii motoare. Nu exist deosebiri eseniale ntre situaia antrenrii prin
puntea din spate i situaia antrenrii prin puntea din fa.
Fig.8.2. Efectul forei portanate i a efectului de deriv asupra
forei tangeniale specifice
100
40
200
300
400
500
600
700
0,6
0,2
0,4
1,0
0,8
0 80 120 160 200 240 280 320 360
v [km/h]
[daN]
F
o
r
t
a
t
a
n
g
e
n
t
i
a
l
a
s
p
e
c
i
f
i
c
a
F
o
r
t
a
t
a
n
g
e
n
t
i
a
l
a
S
a
r
c
i
n
a
n
o
r
m
a
l
a
Devierea pentru ca2=-0,16
Efectul de portanta pentru ca2=+0,16
R +R
r1 a
R2st a2
Z -P
Efectul fortei portante
Efectul de deriva
a)
b)
2 2 2
2 1
1
R a st R
a r
Z
X
P Z
R R
=
+
=
G
a
=1000 daN
st R
Z
2
=500 daN
A= 2 m
2
c
x
= 0,4
f = 0,015
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
130
8.2.2. Cazul deplasarii autumobilului cu viteza constanta pe un drum inclinat
longitudinal
n tabelul 8.1 sunt prezentate relaiile de aproximare, care semnific deplasarea
automobilului pe pante mari cnd viteza este mic i, ca urmare, rezistenele
aerodinamice neglijabile. Dac mai neglijm i rezistena la rulare care este de
asemenea mic, n raport cu celelalte mrimi se obin relaii mai simple i se poate
arta dezavantajul principal pe care l prezint automobilul cu puntea motoare
dispus n fa.
Prin reducerea ncrcrii roilor punii din fa i pentru o for tangenial
aproximativ egala, fora tangenial specific este mai mare dect n cazul punii
motoare dispuse n spate sau, altfel spus, pentru o valoare a aderenei identic, un
automobil cu puntea motoare n fa poate s urce pante mai mici dect un
automobil cu puntea motoare dispus n spate. Aceast afirmaie este valabil dac
automobilele analizate au aceeai pozitie a centrului de greutate (fig.8.3).
Fig.8.3. Influnea poziiei centrului de greutate
F
o
r
t
a
t
a
n
g
e
n
t
i
a
l
a
s
p
e
c
i
f
i
c
a
0
0,10 0,05 0,15 0,25 0,20 0,30
0,2
0,4
0,6
0,8
p (panta)
0,2
0,4
0,6
0,8
1,0
0
b/L=0,30
0,7
0,5
0,5
0,7
0,3
antrenarea ideala a tuturor rotilor
hg/L=0,30
0,25
0,20
0,20
0,25
0,30
antrenarea ideala a tuturor rotilor
a)
b)
L
h
g
=0,2 =constant
1
L
b
=0,5 =constant
1
Limitarea de ctre aderen a capacitii de micare a automobilelor
131
Fora tangenial specific, n cazul automobilelor cu puntea motoare n faa,
se mbuntaete atunci cnd centrul de greutate se deplaseaz mai mult ctre
partea din fa (fig.8.3.a). Coborrea centrului de greutate - avantajoas din alte
motive - are o influen destul de mic asupre forei tangeniale specifice. Dac
pentru o anumit pant limit
x
p antrenarea punii fa i antrenarea punii spate
dau aceeai for tangenial specific atunci la automobilele cu acelai
ampatament L i aceeai nlime a centrului de greutate s fie valabil egalitatea:
x
g
x
x
g
x
p
L
h
L
a lb
p
p
L
h
L
a lb
p
+
=
, ,
s-a introdus marimea
L
a lb,
care reprezint lungimea lui b n cazul antrenrii punii
din fa. Rezult:
x
g
p
L
h
L
b la
L
a lb
= 2
, ,
(8.21)
Fig.8.4. Determinarea valorilor rapoartelor de transmitere
0,1
0,4
0,2
0,3
a)
0,5
0
0,2
0
0,8
0,4
0,6
1,0
b)
1,2
p
2
1
tr I
tr II
tr I
tr II
0 20 10 30 50 40 60 70
v [km/h]
25 , 0 5 , 0 = =
L
h
L
a g
1
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
132
Exemplu numeric: se consider dou automobile cu h
g
=60 cm i L = 240 cm,
care urmeaz s prezinte aceeai eficien pe o panta
0
0
28 28 , 0 = =
x
p . n acest
caz este necesar ca la automobilul cu antrenarea punii din fa centrul de greutate
sa fie deplasat catre partea din fata cu:
cm L L b la a lb 6 , 33 14 , 0 28 , 0
240
60
2 , , = = =
n raport cu poziia centrului de greutate la automobilul cu antrenarea punii din
spate.
Dupa calcularea primei trepte din cutia de viteze, care s asigure capacitatea
maxim de urcare a pantelor trebuie s analizm dac se asigur i fora tangenial
specific corespunzatoare pantei maxime.
Pentru curbele din figura 8.4.a) panta maxim
max
p s-a calculat din fora la
roat excedentar ( )
p r a d R
R R R r M + = / conform figurii 6.13 i folosind
relaiile pentru fora tangenial specific din tabelul 8.1 s-au determinat
1
i
2
n
cazul antrenrii punii din fa, respectiv antrenrii punii din spate. n cazul
antrenrii punii din spate pentru panta maxima de p=0,45=45% este necesar un
coeficient minim de aderen 7 , 0 = , iar n cazul automobilelor cu puntea din fa
motoare de un coeficient 1 , 1 = - cu condiia ca ambele automobile s aiba
aceeai poziie a centrului de greutate.
8.2.3. Cazul deplasarii automobilului cu vitez variabila
Aceast situaie este asemntoare cu cea existent la urcarea pantelor, iar
cnd se neglijeaz rezistena aerului i rezistenta la rulare i influenta maselor n
micare de rotaie, situaiile devin identice.
n astfel de situatie, n locul pantei p poate sa apara raportul:
2
2
d
d 1
t
v
g
,
respectiv:
2
2
d
d 1
t
v
g
p (8.22)
Deducem de aici, c simplificrile avute n vedere la determinarea forei
tangeniale specifice, atunci cnd ne-am referit la urcarea pantelor sunt valabile i
pentru cazul deplasrii automobilului cu vitez variabil pe un drum orizontal.
Dac ns analizm fenomenul mai exact, observm c sarcina pe roata nu este
modificat numai de componenta
2
2
d
d
t
v
L
h
g
G
g
a
|
|
.
|
\
|
, creia la urcarea pantelor i
Limitarea de ctre aderen a capacitii de micare a automobilelor
133
corespunde expresia p
L
h
G
g
a
|
|
.
|
\
|
, i la deplasarea accelerat, intervine i
influena maselor n micare de rotaie ( ) ( ) | |
2
2
2 2 1 1
/ /
dt
v d
L r I L r I
r R r R
+ .
n tabelul 8.1 sunt prezentate relaiile de aproximare pentru determinarea forei
tangeniale specifice. n aceste relaii s-au neglijat forele aerodinamice i
momentele de inerie ale roilor neantrenate.
Avnd n vedere c
1
R
I n cazul antrenrii punii din fa, respectiv
2
R
I , n
cazul antrenarii puntii din spate se modifica o data cu schimbarea treptei de viteze,
este necesar sa se ia n considerare i coeficientul de influen al maselor n micare
de rotaie .
n aceast situaie se obine:
( )
2
2
2
2
1
d
d 1
1
d
d 1
t
v
g L
r
L
h
L
b
t
v
g
d
g
(
,
( )
2
2
2
2
2
d
d 1
1
d
d 1
t
v
g L
r
L
h
L
a
t
v
g
d
g
+ +
Fora tangential specific se modific deci, nu numai cu acceleraia
2
2
d
d
t
v
, ci
i o data cu schimbarea raportului de transmitere n functie de treapta de vitez
necesar n cazul transmisiilor n trepte. Conform figurii 6.15
2
2
d
d
t
v
i depind
reciproc unul de cellalt i ne ofera caracteristica ( ) v f
t
v
=
2
2
d
d
, cu ajutorul creia se
poate calcula numitorul relaiilor (8.23) corespunztor sarcinii pe roata
2 1
,R R
R
raportat la greutatea total
a
G . n figura 8.5.a este aratat dependena dintre
raportul
a R
G Z /
2
i viteza de deplasare v. Din figur rezult c n treapta I,
modificarea sarcinii pe roat datorit influenei maselor n micare de rotaie
exprimat prin ( )
2
2
d
d 1
1
t
v
g L
r
d
nu se poate neglija, n raport cu influena
componentei
2
2
d
d 1
t
v
g L
h
g
. Prima component reprezint influena maselor n
micare de rotaie, iar componenta a doua, influena masei n miscare de translaie.
Dependena dintre fora tangenial specific i viteza de deplasare a
automobilului pentru treptele I i a II-a din cutia de viteze este prezentat n figura
8.5.b. Se observ c n comparaie cu valorile forei tangeniale specifice
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
134
nregistrate la urcarea pantelor (fig.8.4), n cazul micrii accelerate acestea sunt
mai mici att pentru cazul antrenrii punii din fa ct i pentru cazul antrenrii
punii din spate. Acest lucru se datoreaz faptului c din punctul de vedere al
momentului la roata motoare, conform relatiei (6.34) acceleraia.
g t
v 1
d
d
2
2
este mai
mica dect panta p , sau altfel spus, pentru acelai moment la roat (ca mrime)
reaciunea tangenial este mai mic n cazul micrii accelerate dect n cazul
urcrii pantei, din cauz c o parte din moment se consum pentru accelerarea
maselor n micare de rotaie.
Fig.8.5. a) dependena dintre raportul
a R
G Z
2
i viteza de deplasare v
b) dependena dintre fora tangenial specific i videza de deplasare v
0,1
0
2
0,2
0,3
0,4
0,6
0,5
1
v [km/h]
60 50 40 30 20 10 0 70
tr I
tr II
b)
0,7
0,1
0 10 20 30
0
70 40 50 60
v [km/h]
2
0,2
0,3
0,4
tr I
0,6
0,5
1
tr II
a)
a/L
( )
2
2
d
d 1
1
t
x
g
L
r
d
2
2
d
d 1
t
x
g L
h
g
a/L=0,5; hg/L=0,25; rd/L=0,121
Limitarea de ctre aderen a capacitii de micare a automobilelor
135
n general, influena maselor n micare de rotaie asupra modificrii sarcinii
este nesemnificativ att la automobilele cu puntea motoare n spate ct i la cele
cu puntea motoare n fa. Aceasta, deoarece dac invers influena momentelor
de inerie asupra reducerii sarcinii pe roat ar fi mai mare dect asupra forei
tangeniale, atunci fora tangenial specific la puntea din fa ar trebui s fie mai
mare n cazul deplasrii accelerate pe plan orizontal, dect la urcarea pantelor.
8.3. Cazul automobilului cu ambele punti motoare ( 4 4 )
n acest caz toate roile fiind antrenate (motoare) va aprea la puntea din fa
momentul de antrenare
1
R
M i la puntea din spate momentul de antrenare
2
R
M .
mparirea fluxului de putere ntre cele dou puni se face fie ntr-un raport fix
cazul cel mai frecvent fie ntr-un raport variabil. Repartizarea momentului
furnizat de motor la roile amtrenate este:
| |
a d p r d R R R
R R R R r M M M + + + = + =
2 1
Dac la puntea spate momentul este:
R R
M i M =
2
(8.24)
atunci la puntea fa:
( )
R R
M i M = 1
1
(8.25)
Ideal este ca repartizarea momentului la cele dou puni s se fac n mod egal
dac la fiecare dintre acestea exist aceeai aderen.
n continuare se va analiza cum se poate realiza acest lucru. Conform relaiilor
(8.13) reaciunile tangeniale se determin:
1
1 1
d
d
1 R
R
d
R
d
R
R
t r
I
r
M
X =
,
2
2 2
d
d
2 r
R
d
R
d
R
R
t r
I
r
M
X =
respectiv:
( )
2
1
2
1
1
1
2
2
2
2
2
1
d
d
d
d
1
r
r d
R
d
R
r
r d
R
d
R
R
t
v
r r
I
r
M
i X
R
t
v
r r
I
r
M
i X
=
Prin raportarea reaciunilor tangeniale
1
X si
2
X la reaciunile normale
1
R
Z
si
2
R
Z se obin forele tangeniale specifice
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
136
( )| | ( ) ( )
2
2
2
2
1
d
d
d
d
/ 1
2
2
1
1
1 1
1 1 1
t
v
L r
I
r
I
L
h
g
G
P Z
R
t
v
r r I R R R R i
r
R
r
R g
a
a st R
r r d R a d p r
(
(
+ +
+ + +
= (8.26)
| | ( ) ( )
2
2
2
2
2
d
d
d
d
/
2
2
1
1
2 2
2 2 2
t
v
L r
I
r
I
L
h
g
G
P Z
R
t
v
r r I R R R R i
r
R
r
R g
a
a st R
r r d R a d p r
(
(
+ +
+ + +
= (8.27)
n continuare se vor particulariza relaiile obinute mai sus pentru deplasarea
unui automobil cu vitez constant, pe un drum orizontal ( 0 = p ) i pe un drum
nclinat ( 0 p ) .
8.3.1. Deplasarea cu viteza constanta pe un drum orizontal
Cu rezistenele la pant 0 =
p
R i la demarare 0 =
d
R , forele tangeniale
specifice devin:
( ) ( )
1 1
1
1
1
a st R
r r a
P Z
R R R i
+
= ;
( )
2 2
2
2
a st R
r r a
P Z
R R R i
+
= (8.28)
Dupa cum s-a spus, repartizarea ideal a momentului furnizat de motor pe
punile automobilului este atunci cnd
2 1
= i se calculeaz din:
( )
2 1
2 2 2 2
a a a
a st R
a r
a
a r
r
R
R
P P G
P Z
R R
R
R R
R
M
M
i
+
+
+
+
= = (8.29)
Relaia (8.29) se va analiza n dou ipostaze: pentru cazul deplasrii pe
terenuri neamenajate cu vitez mic i pentru cazul deplasrii cu viteze ridicate.
n cazul deplasrii automobilului cu viteze reduse, pe terenuri accidentate,
viteza fiind foarte mic, rezistena aerului se neglijeaz 0
a
R i relaia (8.29)
devine:
r
r
R
R
R
R
M
M
i
2 2
= = (8.30)
Dac se consider c coeficienii de rezisten la rulare la puntea din fa i la
puntea din spate sunt egali (ceea ce n practic la automobilele care ruleaz pe
nisip i la puntea din spate au pneuri duble nu este mereu valabil) se obine cu
aproximaie:
L
a
G
Z
M
M
i
a
st R
R
R
= =
.
2 2
(8.31)
Limitarea de ctre aderen a capacitii de micare a automobilelor
137
Raportul dintre momentul care acioneaz la puntea fa i la puntea spate este:
L
b
Z
Z
R
R
M
M
st R
st R
r
r
R
R
= =
.
.
2
1
2
1
2
1
(8.32)
Momentele vor fi repartizate deci corespunztor rezistenelor la rulare la
cele dou puni sau aproximativ sarcinilor statice pe cele doua punti.
n cazul deplasarii automobilului cu viteze ridicate - conform figurii 8.2 apar
fore tangeniale specifice att de mari nct devine oportun acionarea la toate
roile. Dar n acest caz, rezistenta aerului
a
R este sensibil mai mare dect
rezistena la rulare, din care cauz relaia (8.29) devine:
( )
( )
2
2
2
2
1
2 1
2
2 1
2 2 2
V A c c G
V A c G
L
a
P P G
P Z
M
M
i
a a a
a a
a a a
a st R
R
R
+
=
+
= =
(8.33)
Repartizarea momentelor la diferite puni nu este constant, ci este dependent
de viteza de deplasare. Numai in cazul n care 0
2 1
=
a a
P P , raportul " "i este
constant.
8.3.2. Deplasarea cu viteza constanta pe un drum inclinat longitudinal
Dac se are n vedere c n acest caz deplasarea se face cu viteze mai mici,
forele tangeniale specifice devin:
( ) ( ) ( ) ( )
( ) ( )
st R
st R a
st R
r p r
st R
st R a
st R
r p r
Z
Z f f G i
Z
R R R i
Z
Z f f G i
Z
R R R i
2
2
2
2
1
1
1
1
sin cos
sin cos 1 1
2
1
+
=
+
=
+
=
+
=
(8.34)
Relatiile cu care se calculeaz rezistenele la rulare
st R r
Z f R
1 1
= ,
st R r
Z f R
2 2
= i ( )
st R st R r
Z Z f R
2 1
+ = au n vedere c cei doi coeficieni ai
rezistenei la rulare ai roilor din fa i ai roilor din spate sunt egali f f f = =
2 1
.
Raportul dintre momente n cazul repartizrii ideale a momentului motor cnd
2 1
= este:
tg
cos
2 2
+ =
= =
L
h
L
a
G
Z
M
M
i
g
a
st R
R
R
(8.35)
Relaia (8.35) este identic cu relaia (8.31) dac 0 = i 1 cos = . Rezult
din relaia (8.35) i faptul c distribuirea ideal a momentului pe puni se modific
o dat cu mrimea pantei p .
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
138
Dac se introduce raportul ideal de momente din relaia (8.35) n relaia (8.34)
atunci fora tangenial specific de la puntea din spate tg
2
= respectiv
conform precizrilor fcute mai inainte vom obine:
p = = = tg
2 1
(8.36)
Fa de cele artate, se deduce c n cazul unei raportri ideale a momentelor
panta maxima ce poate fi urcat
max
este dat de coeficientul de aderen
respectiv:
max max
tg p = = (8.37)
iar pentru 1 = ,
0
max
45 = , corespunztor % 100 0 , 1 = = p .
La automobilele cu ambele puni motoare fora tangential specific este mai
mic dect la automobilele cu o singur punte motoare (fig 8.3).
9
DINAMICA FRNRII AUTOMOBILELOR
9.1. Consideraii generale
Spre deosebire de antrenare, frnarea necesit momente negative la roi i prin
acestea, reaciuni tangeniale ndreptate n sensul invers deplasrii automobilului.
n acest caz, la deplasarea unui automobil pe o cale orizontal apare o decelerare
adic acceleraie negativ. Frnarea este important pentru coborrea pantelor, la
fel cum a fost acceleraia pentru urcarea acestora. Din aceast cauz n cele ce
urmeaz se va insista asupra acestor probleme, inclusiv asupra reaciunii
tangeniale specifice dintre roi i calea de rulare.
n general, fenomenele ce apar la antrenare i la frnare sunt asemntoare; dar
se deosebesc prin efectul lor ntruct la frnare (cu excepia frnei de motor i a
celei de staionare) momentele acioneaz la toate roile automobilului i ca urmare
mrimea momentelor absolute i a forelor tangeniale sunt mai mari dect la
antrenare i deci decelerarea este mai mare dect accelerarea.
n cadrul paragrafului (9.2) se va prezenta o revedere asupra rolului ndeplinit
de frne i o privire de ansamblu asupra transformrii energiei mecanice n cldur,
iar ncepnd cu paragraful (9.3) se va ncepe analiza procesului de frnare din
punct de vedere dinamic.
9.2 Rolul sistemului de frnare; Transformarea energiei mecanice n cldur
Sistemul de frnare servete ndepliniri urmtoarelor scopuri:
a) Frnarea de decelerare: reducerea sau anularea vitezei de deplasare;
b) Frnarea de stabilizare: elimin acceleraia nedorit n timpul coborrii
pantelor;
c) Frnarea de staionare: previne deplasri nedorite ale automobilului aflat
n repaus.
Frnarea de staionare constituie o problem de for, adic automobilul
trebuie s se fixeze n raport cu suprafaa de rulare, cu o anumit for tangenial,
pentru a nu rula fr acionare pe un drum nclinat, sau pentru a nu putea fi deplasat
n mod nedorit pe un drum orizontal.
Frnarea de decelerare i de stabilizare, constituie pe lng raporturile dintre
fore, momente i deceleraii, respectiv dintre forele tangeniale specifice i o
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
140
problem energetic. Energia mecanic a automobilului sub forma energiei
poteniale sau cinetice trebuie s se transforme ntr-o alt form de energie
energia caloric ce apare n frne din cauza momentelor de frecare (nu se ine
seama de influena rezistenei aerului i a rezistenei la rulare).
9.2.1. Lucrul mecanic i puterea la frnarea de decelerare
Dac un automobil cu masa m
a
, respectiv greutatea G
a
= m
a
g, se deplaseaz
pe un drum orizontal cu o vitez iniial V
i
i urmeaz s se frneze pn la viteza
final V
f
atunci energia mecanic
) (
2
) (
2
2 2 2 2
f i
R R
R
f i
a
I
V V
m
A + = (9.1)
trebuie s se transforme n cldur (cu neglijarea rezistenei aerului)
n cazul frnrii pn la oprire V
f
=0 se obine
2 2
2 2
i
R
R
i
a
I
v
m
A + = (9.2)
Dac piesele n micare de rotaie se exprim prin viteza v, atunci cu relaia
r r
r v = se obine:
2 2
2
2
1
2
i
a
i
a r
R a
v
m
V
m r
I m
A
+ =
(9.3)
n care expresia din parantez se consider c reprezint aproximativ
coeficientul de influen al maselor n micarea de rotaie .
Exemplu numeric. Se consider un automobil cu G
a
=1000 daN care urmeaz
s fie frnat pn la oprire de la vitez iniial Vi=30m/s108km/h. Lucrul mecanic
pentru 1, A1/2100900=4,810
4
daNm100 kcal. Acesta nseamn c, n cazul
exemplificat cu lucrul mecanic obinut prin frnare se poate nclzi 1 litru de ap,
de la temperatura de 0 C la 100 C. Puterea produs la frn P sau cldura produs
n unitatea de timp este
t A P d d = (9.4)
Dac n timpul frnrii deceleraia
2
2
d
d
t
x
= const., atunci viteza se reduce
astfel:
t
t
x
v
t
x
v v
t
x
t
i i
+ = + = =
2
2
0
2
2
d
d
d
d
d
d
(9.5)
s-a considerat c momentul nceperii frnrii (pentru simplificare) a fost t=0. n
aceast situaie, la acceleraia
2
2
d
d
t
x
(deceleraia) se va introduce semnul minus i
Dinamica frnrii autovehiculelor
141
ultimele trei relaii, rezult puterea de frnare (de asemenea ca valoare negativ)
dup cum urmeaz
+ = t
t
x
v
t
x
m P
i a
2
2
2
2
d
d
d
d
(9.6)
Puterea de frnare se modific odat cu puterea care determin deplasarea i
are o valoare maxim la viteza de deplasare maxim, adic n timpul nceperii
frnrii i descrete odat cu durata frnrii.
Puterea de frnare este zero, atunci cnd viteza de deplasare este zero i se
ajunge dup trecerea timpului t
f
ce rezult din
0
d
d
2
2
= + =
f i
t
t
x
V V
2
2
d
d
t
x
V
t
i
f
=
Puterea medie de frnare n durata de timp t
f
, n cazul unei frnri pn la
oprire este
i a med
v
t
x
m P =
2
2
d
d
2
1
(9.7)
Aria de sub curba din figura 9.1 reprezint lucrul mecanic de frnare conform
relaiei (9.3). Pentru a se obine
i o reprezentare a mrimii
puterii ne vom folosi din nou de
exemplul mecanic prezentat mai
sus, n care un automobil cu
greutatea total de G
a
=1000daN,
urmeaz s fie frnat pn la
oprire, de la viteza iniial
v
i
=30m/s. n acest caz,
deceleraia trebuie s fie
2
2
2
5
d
d
s m
t
x
= -0,5g; rezult
de aici o putere medie:
( ) 7500 30 5 100
2
1
= =
med
P
daN[m/s] 100 = C.P.
Aceast putere medie de
frnare apare n timpul duratei de
frnare t
f
=30/5=6 secunde.
P
P
max
= m v
a
dx
dt
i
= m v P
max
dt
dx
a i
1
2
t
f
= - v
dx
i
1
t
Fig.9.1. Lucrul mecanic de frnare
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
142
9.2.2. Lucrul mecanic i puterea n cazul frnrii de stabilizare
Dac un automobil aa cum este prezentat n figura 9.2 ncepe s coboare
cu viteza iniial v
i
, o pant cu nlimea h=h
i
-h
f
i dac la baza pantei are viteza v
f
,
lucrul mecanic de frnare A se calculeaz din diferena sumei energiei poteniale
E
pot
i energia cinetic E
cin
de la nceputul i la sfritul operaiei de frnare, dup
cum urmeaz:
[ ]
( )
2 2
2 2
2
,
2 2
, ) (
f i a a
f a f a i a i a
f
cin pot cin pot
v v m
h G A
A v m
h G v m
h G
A E E E E
+ =
+ + = +
+ + = +
(9.8)
Fig.9.2.
Deplasarea automobilului este stabilizat atunci cnd viteza de deplasare este
constant, deci
h G A
a
= (9.9)
Puterea este conform relaiei (9.4)
t
h
h
A
t
A
P
d
d
d
d
d
d
= = (9.10)
n care (fig. 9.2) x h = d d
v
f
f
h
i
v
i
h
h
dx
dh
Dinamica frnrii autovehiculelor
143
Dac conform relaiei p tg sin se consider 0 sin = atunci puterea de
frnare se obine
V p G P
a
= (9.11)
Dac lum ca exemplu, din nou automobilul cu greutatea G
a
=1550daN, care
urmeaz s coboare o pant de 8% cu o vitez v=20m/s, atunci trebuie s se asigure
o putere de frnare:
( ) 1550 20 08 . 0 1000 = = P daN[m/s] -20C.P.
Dac se compar cei 20C.P., ce trebuie asigurai n timpul coborrii pantei, cu
cei 100C.P., puterea medie de frnare pn la oprire, atunci coborrea pantei apare
ca o problem de frnare ceva mai simpl.
Frnarea pentru oprirea automobilului a durat n exemplul nostru t
f
= 6s, timp
n care cldura mai poate fi nmagazinat n mare parte n frne i se evacueaz
ntr-o msur mai mic n aerul care circul pe lng automobil. Cldura
nmagazinat n frn este schimbat cu aerul, doar dup frnare i frna se rcete.
n timpul coborrii pantei, deci n cazul unei frnri de stabilizare, echilibrul apare
mai repede. Piesele mecanismului de frnare au deja o anumit temperatur iar
cldura care se produce n continuare (= puterea de frnare), trebuie s se schimbe
cu aerul care circul n jurul automobilului. Dac acest lucru nu se produce, atunci
temperatura pieselor componente ale frnei crete, frna se nclzete progresiv,
ceea ce aduce efectul de frnare i n plus apar suprasolicitri termice. Prin
folosirea unei viteze mai reduse, se poate micora puterea de frnare i prin aceasta
i cldura produs n unitatea de timp. Putem deduce de aici c viteza de deplasare
a automobilului la coborrea pantelor este condiionat de rezistena termic a
frnelor.
Schimbul de cldur n unitatea de timp se poate aprecia comparativ cu un
motor. Automobilul de 1000daN greutate, are de exemplu un motor de 30 C.P.
Aceasta nseamn, n cazul motorului exemplificat, o cantitate de cldur n
unitatea de timp, corespunztor a 30 C.P. ce trebuie disipat n aerul nconjurtor.
Dac se compar acum sistemul de rcire al unui motor rcit cu aer (nervuri pe
cilindri, pe chiulas, ventilator, canale de aer de rcire etc.) cu sistemul de rcire al
unei frne, care este montat practic ascuns n jant, rcirea fcndu-se numai de
aerul care circul n jurul roii (cu excepia automobilelor sport), rezult deosebirea
de ncrcare termica a unei frne. Din aceast cauza trebuie s se gseasc soluii
pentru reducerea pe ct se poate a producerii de cldur n mecanismul frnelor. O
soluie frecvent aplicat este de aceea de a cobor panta cu viteza cu care se i
urc panta respectiv. n acest caz, se folosete motorul ca frna, respectiv motorul
lucreaz ca un compresor, deci ca o main care consum lucrul mecanic. De
asemenea, se pot folosi i frne suplimentare hidraulice i electrice, ce pot schimba
cu mediul nconjurtor o cantitate mai mare de energie mecanic sub form de
cldur, dect frnele cu friciune.
Mai trebuie subliniat i faptul c frnrile repetate ale automobilului pn la
oprire, conduce la o supranclzire a elementelor componente ale frnei.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
144
9.3 Momentele i forele de frnare, capacitatea de frnare
n continuare vom folosi ecuaiile de micare deduse la capitolul 4 i aplicate
la capitolul 5 pentru antrenare la studiul frnrii unui automobil.
Dac analizm n acest sens relaiile (4.14) i (4.17) observm c suma
momentelor la roi este
2
2
2
2
1
d
d
2 1
v A c f p
t
x
g
G
R R R R
r
M M
r
M
x a
d a p r
d
R R
d
R
+
+ + =
= + + + =
+
=
(9.12)
Dac la roi vor aciona momente de frnare, adic M
R
cu semnul negativ,
atunci, dat fiind faptul c rezistena la rulare i rezistena aerului nu poate fi mai
mic de zero, expresia
+ p
t
x
g
G
a
2
2
d
d
trebuie s fie negativ i n valoare
absolut mai mare dect expresia
2
2
1
v A c f G
x a
+ . Exemplificnd pentru
dou cazuri speciale; datorit momentului de frnare, n cazul deplasrii n plan
orizontal (p=0) automobilul ncetinete (
2
2
d
d
t
x
negativ), sau poate cobor o pant (p
negativ) cu vitez constant
= = 0
d
d
d
d
2
2
t
v
t
t
.
Valorile mici ale ncetinirii i ale pantei ce apar n cazul absenei momentului,
se pot calcula din relaia (9.12)
+ = +
2
2
2
2
v
G
A c
f p
dt
x d
g
a
x
(9.13)
Exemplele urmtoare arat c aceste valori sunt mici. Dac coeficientul
rezistenei la rulare f=0,01 i se neglijeaz rezistena aerului, rularea este posibil la
coborrea pantei cu vitez constant dac p=-0,01=-1% sau, n plan orizontal se
atinge o ncetinire de
2
2
2
s m 1 , 0 g 01 , 0
d
d
=
t
x
. pentru 1 . Dac se ia n
considerare rezistena aerului la viteza v=20m/s, A c
x
=0,8m
2
, G
a
=1000daN,
Dinamica frnrii autovehiculelor
145
4 2
m daNs
8
1
= (1,225 kg/m
3
) valorile cresc la p=-(0,01+0,8/10001/16*400)=-
(0,01+0,02)=-3% respectiv
2
2
2
s m 3 , 0
d
d
t
x
.
Aceste valori mici sunt importante n practic, deoarece conform paragrafului
9.2, cantitatea de cldur dezvoltat scade corespunztor acestor valori. Fenomenul
este important n special la coborrea unei pante, deoarece nclinrii longitudinale
ale drumurilor se ntlnesc frecvent.
Pentru calculul forei tangeniale specifice (n cazul frnrii) este necesar s se
cunoasc reaciunile tangeniale i reaciunile normale. Reaciunile normale pot fi
luate de la capitolul 8, iar forele (reaciunile) tangeniale se vor determina n cadrul
acestui capitol.
n comparaie cu figura 4.1, reaciunile tangeniale apar ca fore de frnare
orientate n sens invers micrii automobilului i se noteaz cu
1
1
X F
f
=
2
1
X F
f
= (9.13)
Suma forelor tangeniale conform relaiei (8.14) este acum
2
2
2
2 1
2
1
d
d 1
v A c p
t
x
g
G X X
x a
+
+ = + (9.14)
Un parametru uzual pentru aprecierea capacitii de frnare, l constituie
raportul dintre deceleraia absolut
2
2
d
d
t
x
i acceleraia gravitaional, numit
deceleraie relativ sau coeficient de frnare i este notat cu litera a, deci
2
2
2
2
d
d 1
d
d 1
t
x
g t
x
g
a
rel
=
= (9.15)
Coeficientul de frnare este adimensional i are avantajul c n calcule se
elimin semnul negativ al deceleraiei.
Revenind la momentele de frnare, acestea pot fi din punctul de vedere al
conducerii unui automobil mprite n patru categorii:
1. conductorul auto ridic piciorul de pe pedala de acceleraie; n aceast
situaie, roile motoare trebuie s antreneze att transmisia ct i motorul
apare la aceste un moment de frnare, care poate fi modificat ca mrime n
funcie de alegerea treptei din cutia de viteze.
2. conductorul auto ridic piciorul de pe pedala de acceleraie i acioneaz
ambreiajul. n aceast situaie motorul este decuplat, iar roile motoare nu
mai antreneaz dect transmisia ceea ce face ca momentul de frnare
rezultat s fie mult mai mic.
3. conductorul auto acioneaz n acelai timp i ambreiajul i frna. Prin
aceasta se acioneaz asupra frnei propriu-zise i ca urmare se produc
deceleraii i ncetiniri mari; astfel se reduce nu numai viteza automobilului
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
146
aflat n micare de translaie ci sunt frnate i masele n micare de rotaie
(roile, tamburii de frn, transmisia longitudinal, cutia de viteze etc.)
exprimate prin coeficientul de influen al acestor mase (relaia 9.13). n
apsarea pedalei de frn se frneaz toate roile, n timp ce n cazurile 1 i
2 se aplic un moment de frnare numai pe roile motoare.
4. conductorul auto acioneaz pedala de frn i las motorul cuplat. n
acest caz, la momentul de frnare generat de frna propriu-zis se adaug
i momentul de frnare generat de ctre motor. Dei momentul total este
mai mare, ncetinirea nu crete ntotdeauna i anume n cazul n care
momentul total de frnare (frne + motor) nu este mai mare dect
momentul de traciune al motorului.
n paragrafele urmtoare vor fi tratate cazurile 1 i 3. Cazul 1 este important la
coborrea pantelor; mrimea pantei pe care se poate deplasa automobilul cu vitez
constant fr a utiliza frna propriu-zis i deci fr dezvoltare de cldur prin
frecare poate fi sporit conform relaiei (9.13) datorit pierderilor din motor i
transmisie. Cazul 3 este foarte important pentru frnarea normal la care se ine
seama de aderena dintre roi i calea de rulare.
9.4 Frnarea de stabilizare cu motorul
n cadrul acestui paragraf se va analiza puterea de frnare a motorului n
comparaie cu rezistenele negative ale
automobilului, adic, cu antrenarea n
timpul coborrii unei pante. n figura
9.3 s-au reprezentat unele rezultate
obinute prin ncercarea motoarelor cu
aprindere prin scnteie i a celor cu
aprindere prin comprimare, de unde se
observ creterea presiunilor medii
negative p
r
(prin frnarea cu motorul)
n funcie de pierderile prin frecare i
pompare a motorului, exprimate prin
viteza medie a pistonului c
m
.
Momentul de frnare pentru
motoarele n patru timpi este
l
V
cm daN
pr
daNm
M
h M
=
2
/
796 , 0
n care V
h
este capacitatea
cilindric a motorului. Turaia
motorului n
M
este legat de viteza
medie a pistonului c
m
i cursa s prin
Pierderi prin
antrenarea
motorului
p
[daN/cm]
c [m/s]
6
7
5
4
3
2
1
0 1 2 3 4 5 6 7 8 9 10
m
r
Fig.9.3
Dinamica frnrii autovehiculelor
147
relaia:
min / 30
1
/ rot
n
m
s
s m
cm
M
=
Momentul de frnare disponibil la roile motoare M
R
este egal cu
fM M t
t
M M i
i s m
cm
= =
1
/
(9.16)
Dup cum se vede n relaia (9.16) momentul de frnare care apare la roile
motoare este direct proporional cu raportul de transmitere i invers proporional cu
randamentul transmisiei, deci pierderile de putere n transmisie ajut la frnare.
Viteza de deplasare se determin n funcie de turaia motorului n
M
(neglijnd
alunecarea) cu relaia
) / (
30
s m n
i
r
v
M
t
r
=
n acest fel se poate cunoate momentul de frnare disponibil, n funcie de
viteza de deplasare. Momentul de frnare necesar la coborrea unei pante p cu
vitez constant se obine conform relaiei (9.12) din
2
2
1
) ( v A c f p G
r
M
x a
d
R
+ + = (9.17)
Folosind relaiile (9.16) i (9.17) se obine un cmp de caracteristici aa cum
se arat n figura 9.4 de unde se poate deduce ce anume pant poate fi cobort i
cu ce vitez, folosind doar frnarea cu motorul i transmisia.
Fig.9.5.
F
tr IV
tr III
tr II
tr I
v
r
F
r
tr II
tr III
v
fara frana de motor
cu frana de motor
R +R pt p=0
r a
P const.
r
Panta p<0
0
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
148
Cmpul de caracteristici este trasat fa de axa de ordonat negativ, deoarece
avem de a face cu momente de frnare i poate fi comparat cu graficele referitoare
la capacitatea de micare a automobilelor studiat n capitolele anterioare.
Cmpul de caracteristici al motorului echipat cu cutie de viteze n trepte, se
ntinde de la linia de sarcin total pn la linia caracteristic a frnrii. Dac
conductorul auto ridic piciorul de pe pedala de acceleraie, atunci, n domeniul
frnrii nu mai exist un cmp de caracteristici, cu numai o linie. O anumit pant
poate fi cobort de exemplu n treapta a 4-a a cutiei de viteze numai cu o
anumit mrime a vitezei. Dac viteza este prea mare, atunci trebuie printr-o
frnare suplimentar s se apeleze la frna propriu-zis cu friciune, sau s se
cupleze o treapt inferioar n cutia de viteze. n aceast situaie, dac se produce
stabilizarea, n treapta a 3-a i viteza de deplasare va fi mai mic ns precis
determinat.
n paragraful (9.2) s-a artat c pot fi coborte pante mari fr folosirea frnei
propriu-zise (cu frecare) dac se folosete frnarea permanent. n figura 9.3 este
prezentat creterea presiunii medii a motorului, acionat de ctre roile motoare ale
automobilului n cazul folosirii frnrii permanente (de durat). Se pune n eviden
faptul c prin aceast metod, momentul de frnare aproximativ dubla datorit
pierderilor prin frecare i pompare.
Din figura 9.5 rezult faptul c, utiliznd frna de motor se poate deplasa
automobilul pe o pant mai mare i c o anumit pant poate fi cobort n treapta
de viteze ce asigur o vitez mai mare. nseamn c frnarea cu motorul pe lng
faptul c protejeaz frna propriu-zis cu friciune, face posibil i realizarea unei
viteze medii mai ridicate.
9.5 Distana de frnare, n cazul frnrii propriu-zise
Dac un automobil trebuie s fie frnat rapid, eficiena operaiei de frnare se
poate evalua prin cunoaterea distanei de frnare. Asupra distanei de frnare
acioneaz o serie de influene ce vor fi analizate n continuare.
9.5.1 Procesul de frnare
n figura 9.6 se prezint etapele procesului de frnare n funcie de durata
acestora, dup cum urmeaz:
ntre momentul identificrii obstacolului care cere redudecera sau anularea
vitezei i momentul n care ncepe s acioneze fora piciorului asupra pedalei de
frn F
p
se consum timpul de reacie t
r
. Acest timp se compune din timpul necesar
ridicrii piciorului de pe pedala de acceleraie i aezarea pe pedala de frn i
durata necesar pentru nvingerea jocului existent n articulaia pedalei de frn. n
timpul acionrii pedalei de frn t
b
, fora la pedal crete de la 0 la valoarea
Dinamica frnrii autovehiculelor
149
maxim F
p
(fig. 9.6 a). De la apariia forei la pedal la apariia forei de frnare i,
deci, la apariia decelerrii se scurge un
timp t
a
(fig. 9.6 b). n contiunare trebuie
consumat un timp pentru nvingerea
jocurilor existente n sistemul de frnare
(articulaii, lagre etc.) pn la contactul
nemijlocit dintre elemente de friciune.
n perioada t
r
+t
a
viteza de deplasare
a automobilului este constant, dac nu
se ine seama de influena motorului i
transmisiei (motorul este cuplat) i este
egal cu viteza iniial V
i
astfel c n
acest timp automobilul parcurge un
drum relativ lung.
Pn n momentul n care
accelerarea atinge valoarea maxim,
trece timpul t
s
, care este mai mare dect
timpul de cretere a forei la pedal la
valoarea maxim t
b
.
n continuarea procesului de frnare
s-a considerat c att fora la pedal F
p
ct i timpul t
v
i deceleraia
2
2
d
d
t
x
sunt
constante.
Dependena dintre deceleraia
2
2
d
d
t
x
i momentele de frnare
2 1
,
R R
M M i
forele de frnare
2 1
,
f f
F F rezult din
relaiile (9.12), (9.13) i (9.14).
Din desfurarea n timp a
procesului de frnare conform figurii
9.6 b se poate obine prin integrare
variaia vitezei (fig. 9.6 c) i a distanei
de frnare (fig. 9.6 d).
9.5.2. Distana frn la oprire
Distana de oprire conform figurii 9.6 d se compune din:
a) distana parcurs de automobil n timpul t
r
+t
a
:
( )
a r i
t t v S + =
1
(9.18)
F
o
r
t
a
l
a
p
e
d
a
l
a
F
p
t t
t
r b
t
2
1
t
a
s
t
v
t
1
2
v
t
v
2
v
i
dt
dx
F
+
F
f
1
f
2
D
i
s
t
a
n
t
a
d
e
f
r
a
n
a
r
e
D
i
s
t
a
n
t
a
d
e
o
p
r
i
r
e
s
v
Durata de franare
Durata de oprire
a
b
c
d
Fig.9.6.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
150
b) distana parcurs de automobil n timpul t
s
; acesta se calculeaz n funcie
de deceleraie care se modific (conform figurii 9.6 b) din relaia:
s
i
v
t
t
t
x
t
x
=
2
2
2
2
d
d
d
d
(9.19)
(la ncetinire se ia pentru
v
dt
x d
2
2
o valoare negativ) i n funcie de viteza de
deplasare:
s
i
v
s
i
v
i
t
t
t
x
t
t
t
t
x
v v
+ =
2
2
2
2
d
d
d
d
d
(9.20)
obinndu-se:
6 d
d
d
2
2
2
0
2
s
v
s i
t
t
t
x
t v t v S
s
+ =
= (9.21)
distana parcurs de automobil n timpul t
v
:
Deoarece conform figurii 9.6 b deceleraia . const
d
d
d
d
2
2
2
2
=
=
v
t
x
t
x
, viteza
de deplasare este:
+ =
+ = t
dt
x
v t
t
x
v v
V V
2
2
2
2
2
2
d
d
d
d
(9.22)
n care v
2
reprezint viteza de deplasare dup scurgerea timpului t
s
i se calculeaz
din relaia (9.20)
2 d
d
2
2
1 2
s
V
t
t
x
v v
+ = (9.23)
Timpul t
v
, dup scurgerea cruia viteza a sczut la zero, rezult din relaiile
(9.22) i (9.23)
2
d
d
d
d
2
2
2
2
2 s
v
i
v
v
t
t
x
v
t
x
v
t
= (9.24)
Spaiul (distana) de frnare S
3
corespunztor timpului t
v
se obine cu relaia:
=
=
+ =
=
s
v
i
s
v
i
v
v
v
v
t
t
t
x
v
t
t
x
v
t
x
t
x v t
t
x
t v t v S
v
2
2 2
2
2
2
2
2
2
2
2 2
2
2
2
2
2
0
3
d
d
4 d
d
d
d
2
1
d
d
2 2 d
d
d
(9.25)
Dinamica frnrii autovehiculelor
151
Distana de oprire, conform relaiilor (9.18), (9.21) i (9.25) va fi:
2
2
2
2
2
2
3 2 1
24
d
d
d
d
2
2
s
v
v
i s
a r i op
t
t
x
t
x
v t
t t v S S S S
+ + = + + = (9.26)
Pentru ilustrarea celor artate mai sus se vaprezenta urmtorul exemplu:
[ ] [ ] [ ]
2
2
2
/ 5
d
d
/ 108 / 30 s m
t
x
h km s m v
v
i
=
= = ; [ ] s t
r
1 = ; [ ] s t
a
2 . 0 = ; [ ] s t
a
3 . 0 =
[ ] m S
op
52 , 130 02 , 0 90 5 , 40 10 9
24
5
10
900
35 , 1 30
2
= + = + =
Aa cum se rezult din exemplu dat, n cazul timpilor limit, se poate neglija
cel de-al treilea element din
relaia (9.26). n aceast situaie
este valabil cu aproximaie
relaia:
v
i
s
a r i op
t
x
v
t
t t v S
+ +
2
2
2
d
d
1
2
2
(9.27)
Pe baza relaiei (9.27),
variaia acceleraiei conform
figurii 9.6 b se poate reprezenta
simplificat (figura 9.7 a). n locul
celor trei perioade t
r
+t
a
, t
s
i t
v
vom avea numai dou i anume
t
r
+t
a
+t
s
/2 i t
s
/2+t
v
. Pe parcursul
primei perioade deceleraia este
zero (fig. 9.7 b) i apoi crete
brusc la mrimea
v
t
x
2
2
d
d
.
innd seama de relaia (9.15) din care rezult c deceleraia relativ este
notat cu a respectiv
0
t
t
r
t + t
s
t
v
t
s
(t /2) + t
r
t + t + t /2
s
a s v
d
x
d
t
d
t
x
dt
dx
v
dt
dx
v
a
b
Fig.9.7.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
152
V
rel
t
x
g a
=
2
2
d
d
atunci relaia (9.27) devine
g a
v t
t t v S
rel
i s
a r i op
+
+ + =
2 2
2
(9.28)
Timpul pn la oprire
v s a r op
t t t t t + + + =
rezult, avnd n vedere relaia (9.24) dup cum urmeaz
g a
v t
t t
t
x
v t
t t t
rel
i s
a r
i s
a r op
+
+ + =
+ + =
2 2
d
d 2
2
2
(9.29)
Introducnd datele din exemplul numeric menionat mai sus, obinem
( ) s t
op
35 , 7 5 30 15 , 0 2 , 0 0 , 1 = + + + =
9.5.3. Distana de frnare minim i distana de frnare suplimentar
n cazul unei frnri puternice urmarea apariiei unui pericol distana de
frnare trebuie s fie ct mai scurt posibil i prin urmare conductorul
automobilului va ncerca s frneze automobilul cu deceleraia maxim
max
2
2
d
d
t
x
, respectiv cu deceleraia relativ maxim ( )
max
2
2
max
d
d 1
=
t
x
g
a
rel
. n
aceast situaie trebuie s se obin o distan de oprire minim
( )
max
2
min
2 2
rel
i s
a r i
a g
v t
t t v S
+
+ + = (9.30)
S-a considerat ca acceleraia maxim (a
rel
)
max
este este acea deceleraie care se
obine cnd roile unei puni nu sunt nc blocate adic nu patineaz i mai pot
prelua nc fore de ghidare lateral.
n general aceast deceleraie nu este identic cu deceleraia ideal
id
t
x
2
2
d
d
, sau
deceleraia relativ ideal
id
id rel
t
x
g
a
=
2
2
.
d
d 1
care se poate obine n cazul
ideal pentru o anumit stare de ncrcare i pentru o anumit stare a cii de rulare;
deoarece n mod normal roile nu se blovheaz n acelai timp, de exemplu roile
punii din spate se blocheaz mai repede dect cele ale punii din fa. n puntea din
spate, fora maxim de frnare se atinge mai devreme dect la puntea din fa; n
aceast situaie se cresc fore de frnare i deci deceleraiile.
Dinamica frnrii autovehiculelor
153
Prin urmare
id
t
x
t
x
2
2
max
2
2
d
d
d
d
respectiv
id rel max rel
a a .
De asemesea, la un automobil echipat cu o frn ideal, timpul de reacie t
a
=0,
iar timpul t
s
n care deceleraia atinge valoarea maxim este egal cu timpul t
b
de
cretere a forei la pedal la valoarea maxim. n acest automobil aa zis ideal
distana de oprire ideal poate fi
g a
v t
t v S
id rel
i b
r i id op
+
+ =
.
2
.
2 2
(9.31)
Cele dou distane de frnare S
op.id
i S
rel.in
s-ar putea una la cealalt, obinndu-
se un coeficient adimensional S
min
/S
op.id
. n practic se folosete ns distana ca
valoare calitativ, respectiv se determin diferena dintre distanele de frnare,
adic
+ = = 1
2
) (
2
1
max .
.
.
2
. min
rel
id rel
id rel
i
b s a i id op
a
a
a g
v
t t t v S S S (9.32)
Deceleraia ideal
v
t
x
2
2
d
d
, respectiv coeficientul de frnare (deceleraia
relativ) a
rel id
care se ating la limita de aderen, se pot calcula n cazul deplasrii
pe un drum orizontal i cu neglijarea rezistenei aerului cu relaiile (9.13), (9.14) i
(9.15).
n practic nu toate roile trebuie s se blocheze exact n acelai timp, ci cu o
oarecare aproximaie, deoarece este chiar mai avantajos ca roile unei puni s se
blocheze ceva mai trziu; n acest fel automobilul cu roile unei singure puni
blocate poate fi stpnit mai uor de ctre conductorul auto.
n aceast situaie:
( )
id rel a
id
a
f f
a G
t
x
g
G
X X F F
.
2
2
2 1
d
d
2 1
=
= + = + (9.33)
Fora de frnare maxim ce se poate obine la fiecare roat n parte este la
limita aderenei
1 1
1
Z F X
f
= =
2 2
2
Z F X
f
= =
Suma forelor de frnare maxime poate fi
( )
a R R f f
G Z Z F F = + = +
2 1 2 1
(9.34)
n care s-a neglijat influena forei portante.
Egalnd relaiile (9.33) cu (9.34) se obine deceleraia relativ ideal
= =
id rel
id
a
t
x
g
.
2
2
d
d 1
(9.35)
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
154
Dac se introduce aceast expresie n relaia (9.32) atunci distana de frnare
suplimentar se obine relaia
( )
+ = 1
2 2
1
max .
2
rel
i
b s a i
a g
v
t t t v DS
(9.36)
n continuare printr-un exemplu numeric vom calcula distana de frnare
suplimentar folosind datele: 7 , 0 = ,
2
max
2
2
/ 5
d
d
s m
t
x
=
, corespunztor unei
a
rel max
0,5, t
a
=0,2 s, t
s
=0,3 s pentru t
b
= 0,2 S, v
i
=30m/s.
m DS 3 , 33 8 , 25 75 1
5 , 0
7 , 0
81 , 9 7 , 0 2
900
) 05 , 0 2 , 0 ( 30 = + =
+ + =
Pentru viteza iniial v
i
=20 m/s DS=5+11,5=16,5m.
Suplimentarea distanei de frnare fa de cazul ideal de frnare este format
din dou componente (la fel ca i distana total de frnare) i anume: dintr-o
component format din timpi ( )
+
b s a
t t t
2
1
i o component care cuprinde
raportul dintre dou decelerri
max .
max
2
2
2
2
d
d
d
d
rel
id
a
t
x
t
x
, respectiv deceleraia ideal
supra deceleraia maxim.
n tabelul 9.1 sunt prezentate valorile timpilor suplimentari, de frnare obinute
prin msurtori de frnare obinute prin msurtori de la Institutul pentru tehnica
autovehiculelor a Universitii din Braunschweig.
Pentru a se menine o distan de frnare ct mai mic, trebuie redus la maximum
posibil componenta timpilor de reacie (cel mai bine zero) iar ctul raportului
deceleraiilor s se apropie de valoarea unu.
Tabelul 9.1
a) Timpul de reacie, valori medii din ncercri n micare i n repaus A=70mm
Procentajul persoanelor
care au efectuat
Timpii de reacie
tr
10% 0,44s
50% 0,52s
90% 0,65s
b) Timpul de declanare a reaciei i de ridicare a piciorului de pe pedala de acceleraie i
aezarea pe pedala de frn. Valori medii determinate din ncercri n micare i n repaus.
Timpul de neutrare a piciorului mai mic de Procentul persoanelor
care au realizat valorile
Timpul de declanare a
reaciei mai mic de A=130 mm A= 70 mm A=0 mm
Pedala de
Frn
Pedala de
acceleraie
Dinamica frnrii autovehiculelor
155
10% 0,28s 0,17s 0,16s 0,13s
50% 0,33s 0,21s 0,19s 0,16s
90% 0,41s 0,26s 0,21s 0,18
c) Timpul de acionare a pedalei de frn: valori medii determinate din ncercri n repaus.
Timpii de acionare tb
Procentul persoanelor
supuse testului
Acionare puternic
a frnei
(37daH/0,5g)
Acionare medie a frnei
(21daH/0,5g)
Acionare
uoar a
frnei
(1daH/0,5g)
10% 0,06s 0,05s 0,06s
50% 0,13s 0,09s 0,09s
90% 0,36s 0,35s 0,36s
9.6 Fora tangenial specific de frnare n cazul frnrii propriu-zise
Ca urmare a acionrii pedalei de frn cu fora F
p
, la roile automobilului apar
momente de frnare aa cum se vede i n figura 9.8. Aceste momente negative
acioneaz numai atunci cnd fora la pedala de frn atinge o anumit valoare,
ntruct n sistemul de frnare trebuie mai nti nvinse unele rezistente cum sunt
forele elastice ale arcurilor de reducere, forele de frecare etc.
Fig. 9.8.
Creterea momentului de frnare n funcie de fora la pedal dei de regul
este liniar exist i situaii cnd aceast liniaritate nu se mai respect. Suma
momentelor de frnare, determin, n conformitate cu relaia (9.12) o acceleraie
relativ:
Fp
M
f
M
f1
f2
M
M + M
f1 f2
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
156
+ + +
= =
a
x
a d
R
rel
G
v A c
f p G r
M
t
x
g
a
2 2
2
2
1
) ( 1
d
d 1
(9.37)
(M
R
se introduce cu semnul minus deoarece reprezint moment de frnare).
Momentele de frnare la roi, produc reaciunile tangeniale (forele de frnare)
deosebit de importante pentru aderena dintre roi i drum.
innd seama de relaiile (4.6) i (4.9) i de notaiile F
fi
i F
f2
ce au fost introduse
pentru forele de frnare prin relaiile (9.13) vom avea:
1
1
1 2
1
2
1
1
d
d
) (
r
d
R
d
R
f
R
t r
I
r
M
F X +
= =
(9.38)
2
2 2
2 2
2
2
2
d
d
) (
r
d
R
d
R
f
R
t r
I
r
M
F X +
= =
(9.39)
(Deoarece momentele M i acceleraiile unghiulare
2
2
d
d
t
x
sunt negative,
expresiile dintre paranteze devin pozitive).
Pentru a se obine forele de frnare specifice, trebuie s se mpart forele de
frnare la reaciunile normale. Dar reaciunile normale sunt dependente de procesul
de ncetinire, adic de mrimea momentelor de frnare (relaia 9.37).
Corelaia dintre fora la pedal, momentele de frnare, deceleraia relativ,
forele de frnare, reaciunile normale i forele tangeniale specifice este mai
complex i pentru a simplifica calculele se neglijeaz influena rezistenelor la
rulare i a aerului, deplasarea se consider c se face pe un drum orizontal i se
neglijeaz de asemenea influena maselor n micare de rotaie i a alunecrii.
Cu aceste simplificri relaiile (9.38) i (9.39) devin:
d
R
f
r
M
F
1
1
,
d
R
f
r
M
F
2
2
(9.39)
iar din figura 9.8 neglijnd i forele arcurilor de reducere i forele de frecare
din sistemul de frnare obinem reprezentarea din figura 9.9.
Din suma celor dou fore de frnare conform relaiilor (9.13) i (9.14) se
calculeaz
rel a a f f
a G
t
x
g
G F F =
= +
2
2
d
d 1
2 1
(9.40)
deceleraia absolut
2
2
d
d
t
x
respectiv deceleraia relativ a
rel
, (coeficientul de
frnare) care reprezint n figura 9.9 b ordonat.
Dinamica frnrii autovehiculelor
157
Fig. 9.9.
Mrimea reaciunilor normale ce acioneaz asupra punilor devine dac se
iau n vedere simplificrile menionate i n plus se neglijeaz i fora portant a
aerului conform relaiilor (8.7) i (8.9)
rel
g
a R R
a
L
h
G Z Z
st
+ =
1 1
(9.41)
rel
g
a R R
a
L
h
G Z Z
st
+ =
2 2
(9.42)
Figura 9.9 b arat c odat cu creterea intensitii frnrii crete i sarcina pe
puntea din fa i scade n acelai timp sarcina pe puntea din spate.
Prin urmare forele de frnare specifice se calculeaz cu expresiile
1
1
R
si
f
Z
F
=
2
2
2
R
s
f
Z
F
= (9.43)
Trebuie s se mpart valorile lui F
f
i Z ce corespund aceleiai deceleraie
negativ a
rel
ntre ele. Rezultatele sunt prezentate n figura 9.9 b. Ele sunt diferite
coeficientul de aderenta
1,2
1200 1400
1,4
400 600 800 1000
1,0 0,8 0,6 0,4
Se blocheaza intai
puntea fata
1,0
0,8
200
0,4
0,6
0,2
0,2 0 10 20
200 0,2
[daN]
40 30
0,4 400
0,6 600
800 0,8
daN
1
2
3
4
f2 f1
F + F
F
f1
F
f2
p
F
Se blocheaza intai puntea spate
a
rel.id
Z
R1
R2
Z
f2
f1
Z
R1 R2
,Z
a
b
c
0
,7 0,2
0
,1
0
0,1
0,8 0,6 0,4 0,2
ideal
0
,4
0
,3
0
,2
0
,6
0
,5
0,3
linear
1
,1
1
0
,9
0
,8
1
,2
f2
F /G
a
F /G
f1 a
G
a
=1000 daN; Z
R1st
=500 daN; Z
R2sr
=500 daN;
L=2,4 m; a=1,20 m; b=1,20m; h
g
=0,6 m
(1) drum acoperit cu ghea; (2)-drum acoperit
cu zpad bttorit, (3)-drum ud; (4)-drum uscat.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
158
pn la un anumit punct pentru puntea fa i pentru puntea spate. Pe baza celor
menionate, n cazul unei frnri de pn la 50% fora de frnare specific la puntea
din fa este mai mic dect cea de la puntea din spate ( )
2 1
f f
< , acestea devin
egale la frnarea de 50% i se inverseaz valorile (adic ( )
2 1
f f
> ) la frnri mai
mari de 50%.
Pe abscis se poate specifica pe lng fora de frnare specific
f
i
coeficientul de aderen deci valoarea maxim a forei de frnare specifice
( ) =
max f
. n situaie se arat faptul c pe un drum acoperit de ghea cu 1 , 0 =
este posibil doar o frnare maxim de a
rel max
= 0,085 cu roile nc neblocate.
Dac se ncearc o cretere a intensitii frnrii atunci roile punii din fa
patineaz n timp ce roile punii spate nc mai ruleaz adic puntea din fa are
roile blocate prin suprafrnare.
Pe un drum de beton cu suprafaa uscat, cu 8 , 0 = , se blocheaz mai nti
puntea din spate. n figura 9.9 b sunt haurate diferitele domenii ale blocrii roilor
prin frnare. Din diagrama mai putem afla ct de mare pentru o anumit valoare a
coeficientului de aderen este deceleraia relativ maxim posibil a
rel max
dac
nici o roat nu a nceput s fie blocat, aa cum s-a exemplificat pentru 1 , 0 = .
Dar, avnd n vedere n conformitate cu relaia (9.35) ntre coeficientul de aderen
, deceleraia ideal
id
t
x
2
2
d
d
i deceleraia relativ ideal a
rel id
exist un raport
de interdependen se poate determina raportul
max .
.
max .
2
2
max
2
2
d
d
d
d
rel
id rel
rel
id
a
a
a
t
x
t
x
= =
. n
acest fel s-a obinut una din mrimile (ce sunt) determinate pentru creterea
lungimii spaiului de frnare din relaia (9.3.2). Raportul a fost introdus n figura
9.9 c i se afl n acest exemplu, precum i n cazul coeficienilor uzuali de
aderen pe osea, ntre 0,8 i 1.
Raportul
max .
.
max . rel
id rel
rel
a
a
a
= este considerat de regul ca o msur a
eficienei sistemului de frnare. Despre acest lucru se va mai discuta n paragraful
9.7 cnd se vor cuta soluii apropiate de cazul ideal, adic raportul a
rel max
/ a
rel.id
s
fie ct mai aproape de 1 pentru toate valorile existente ale coeficientului de
aderen .
9.6.1 Variaia deceleraiei negative n funcie de viteza de deplasare a
automobilului
Dinamica frnrii autovehiculelor
159
n cadrul acestui paragraf se vor analiza procesele de micare cnd vitezele de
deplasare sunt variabile. Deoarece, coeficientul de aderen depinde de viteza de
deplasare, atunci trebuie ca i deceleraia maxim a
rel max
s fie o funcie de vitez.
Pentru a exemplifica, s analizm figura 9.10, n care a fost trasat nc o dat
diagrama din figura 9.9 c (fig. 9.10 a) i s-a reprezentat reducerea coeficientului de
aderen n raport cu viteza v pentru cazul unor osele uscate i umede (fig. 9.10
b). De aici s-a calculat deceleraia relativ maxim pentru cele dou stri ale
drumului (uscat i umed) n funcie de viteza de deplasare v (fig. 9.10 c).
Deceleraiile relative maxime a
rel max
pentru oselele uscate i umede, cresc odat cu
scderea vitezei de deplasare, sau pot crete atunci cnd fora de acionare a pedalei
de frn este att de mase nct n permanen forele de frnare specifice s fie
identice cu coeficientul de aderen .
Fig.9.10.
Din figura 9.10 c se observ c pentru o eficien corespunztoare a frnrii
(rezultatele din figura 9.10 a) pe osea uscat, roile din spate ajung mai repede la
valoarea coeficientului de aderen . Acest lucru este valabil pentru ntreg
domeniul de viteze. Pe osele umede exist ns pericolul ca roile punii din spate
s se blocheze primele numai pentru viteze de deplasare cuprinse ntre 0 90 km/h,
iar la viteze de peste 90 km/h se blocheaz mai nti roile punii din fa. Cu linii
ntrerupte este reprezentat n figura 9.10c dependena deceleraiei relative ideale
(a
rel.id
) de viteza de deplasare, adic frnarea ce ar fi posibil dac fora de frnare
umed r
o
t
i
le
s
p
a
t
e
umed
120
60 20 40 0
0,4
60
20
b
0
0,2
40
80
v
[
k
m
/
h
]
100
0,6 0,8
c
1,0
0,2
0,4
a
t
in
g
100 80 120 0 20 60 40 80 100 120
v[km/h]
v[km/h]
d
r
o
t
il
e
f
a
t
a
a
t
i
n
g
10
a / =1
real.max
a
/
r
e
a
l
.
m
a
x
0,8
a
0
0,4
0,6
1,0
a
r
e
a
l
.
m
a
x
0,6
0,8
1,0
uscat
[
d
a
N
]
20
F
p
uscat
30
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
160
se specific ar fi la fel pentru ambele puni, la orice valoare a coeficientului de
aderen .
n figura 9.10 d este reprezentat, variaia forei la pedal F
p
, a unui
conductor auto ideal care apas exact att nct s apar la roile punii
determinante valoarea coeficientului , corespunztor frnrii automobilului cu
deceleraia relativ maxim (a
rel max
) fr ns s se blocheze roile i automobilul s
alunece lateral. Conform figurii 9.10 d, conductorul auto, trebuie s modifice fora
de acionare a pedalei n funcie de viteza de deplasare i de starea drumului. Cu
alte cuvinte conductorul auto trebuie s calculeze totul ca de exemplu, anvelope
diferite, ncrcare variabil, corelarea forei la pedal cu forele de frnare etc.; ceea
ce nseamn prea mult i deci el trebuie ajutat. Acest lucru s-ar putea realiza, dac
valorile coeficientului ar deveni independente de vitez, sau chiar de tipul
drumului (beton, asfalt) i de starea acestuia (uscat, umed, zpad, ghea). Dac
acest lucru ar fi posibil, nu ar mai fi necesar modificarea forei la pedala de frn
odat cu viteza de deplasare sau cu starea i tipul drumului. Totui conductorul ar
putea s fac greeala n acest caz, de a bloca roile printr-o frnare prea puternic
i de a provoca deraparea automobilului sau de a prelungi distana de frnare
printr-o frnare insuficient i prin aceasta s se produc o eventual coliziune.
Urmrile unei frnri excesive ar putea s fie diminuate de un corector de frnare,
care nu ar putea permite blocarea roilor.
n concluzie trebuie s se rein c reprezentrile din figura 9.6 a i 9.6 b sunt
valabile numai pentru situaiile de frnare n care deceleraia relativ se situeaz
sub valoarea ei maxim adic sub a
rel max
.
9.6.2 Variaia distribuiei forelor de frnare
Dup tratarea concomitent a factorilor om frn pneu calea de rulare sau
fora la pedala de frn deceleraia relativ fora de frnare specific
coeficient de aderen viteza de deplasare, revenim la diagramele din figura 9.9.
Dependena forelor de frnare specifice
1
f
i
2
f
de deceleraia relativ din
figura 9.9.6 i dependena eficienei frnrii exprimate prin raportul
max rel
a de
coeficientul de aderen pot fi modificate printr-o alt repartizare a momentelor
de frnare
1
f
M i
2
f
M (
1
R
M i
2
R
M ) la puntea din fa i puntea din spate.
Pentru a evidenia acest lucru, se definete aa cum s-a fcut n paragrafele
anterioare raportul dintre momente
2 1
2
R R
R
M M
M
i
+
=
2 1
1
1
R R
R
M M
M
i
+
= (9.44)
cu simplificrile fcute la paragraful (9.6) i innd seama de relaia (9.40) se
formeaz din raportul dintre momentele de frnare un raport dintre forele de
frnare:
Dinamica frnrii autovehiculelor
161
rel a
f
f f
f
a G
F
F F
F
i
=
+
=
2
2 1
2
rel a
f
f f
f
a G
F
F F
F
i
=
+
=
1
2 1
1
1 (9.45)
Dei constructiv, momentele de frnare se repartizeaz la roile automobilului,
uzual se folosete raportul forelor de frnare sau repartizarea acestora la rpi. Aa
se va proceda i n analiza de fa dei nu este tocmai corect dac se ine seama de
simplificrile fcute la relaiile (9.3.9).
n figura 9.9 a raportul este constant i reprezint I=3/8. Dac raportul se modific,
se urmrete prin creterea lui F
f2
i reducerea lui F
fi
n aa fel nct suma F
fi
+F
f2
s
rmn aceeai i prin acesta i deceleraia relativ, atunci domeniul suprafrnrii
roilor din spate va crete i domeniul suprafrnrii roilor din fa se va reduce.
Punctul de intersecie al curbelor
1
f
i
2
f
, respectiv 1 =
max rel
a , se deplaseaz
ctre valori mai mici ale coeficientului de aderen . Dac, ns, raportul i se
micoreaz, atunci punctul de intersecie al curbelor
1
f
i
2
f
se situeaz ctre
valori mai mari ale coeficientului de aderen.
Matematic, acest lucru poate fi exprimat, introducnd n ecuaia (9.43) relaiile
(9.45), (9.41) i (9.42). n aceast situaie se obine:
L
h
a L
b
i
g
rel
f
+
=
1
1
1
L
h
a L
a
i
g
rel
f
+
=
1
1
2
(9.46)
Dac
2 1
f f
= , atunci a
rel
=a
rel.id
i deci a
rel.id
= i putem cu ajutorul expresiilor
(9.46) s obinem condiia:
1
max .
=
rel
a
pentru
=
L
h
L
a
i
g
(9.47)
Printr-un exemplu numeric vom modifica figura 9.9:
1
max .
=
rel
a
la 5 , 0 =
Cu 5 , 0 =
L
a
i 25 , 0 =
L
h
g
rezult i=0,5 - 0,125 = 0,375 =
8
3
Conform figurii 9.9 a la valoarea forei la pedal F
p
=27 daN, ntr-adevr
raportul ( ) 8 3 800 300
2 1 1
= = +
f f f
F F F .
Comportarea gradului de calitate al instalaiei de frnare
max rel
a n funcie
de se calculeaz pentru dou domenii i anume:
pentru domeniul suprafrnrii roilor din fa cu relaia (9.46)
=
+
=
L
h
a L
b
i
g
max rel
f
1
1
1
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
162
sau
=
L
h
i
L
b
a
g
rel
1
max .
(9.48a)
pentru domeniul suprafrnrii roilor din spate
+
=
L
h
i
L
a
a
g
max rel
(9.48b)
Pentru a trasa cu o oarecare aproximaie curba gradului de calitate al instalaiei de
frnare ( )
max rel
a sunt suficiente trei puncte. Unul este dat de relaia (9.4.7.), iar
celelalte dou se calculeaz din relaiile (9.48a) i (9.48b).
i
L
b
a
max rel
= =
1
) 0 (
(9.49a)
L
h
i
L
a
a
g
max rel
+
= = ) 1 (
(9.49b)
care s-a considerat c pentru 1 = se suprafrneaz roile din spate, iar pentru
0 = se suprafrneaz roile din fa. Dac se micoreaz raportul dintre forele de
frnare, distribuia ideal se deplaseaz ctre valorile mai mari ale coeficientului
i se nrautete gradul de calitate pentru valorile mai mici ale lui ; adic
deceleraia maxim posibil pe drumurile acoperite de polei sau de zpad bttorit
descrete. n creterea raportului i frnarea se mbuntete pe acest fel de
drumuri, dar se nrutete pe drumuri cu valori mari pentru .
Trebuie fcut precizarea c n exploatare, distribuia forelor de frnare se
paote modifica, ca urmare a reducerii capacitii de frecare dintre elementele
componente sistemului de frnare. De exemplu, coeficientul de alunecare dintre
ferodon i tambur i corpul frnelor cu tambur, sau ntre ferodon i disc n cazul
frnelor cu disc, nu se pstreaz constant n funcie de viteza de alunecare i
este dependent de viteza de deplasare i, deci, de temperatur. Dac forele de
frnare se modific astfel nct raportul i s rmn constant aceast modificare nu
are influent asupra forelor de frnare specifice, ci numai asupra forei de pedal.
Dac n schimb, forele de frnare F
fi
i F
f2
se modific ca mrimi procentuale
diferite, atunci se poate produce i o deplasare a comportamentului gradului de
calitate al frnrii.
Dinamica frnrii autovehiculelor
163
9.6.3. Limitarea forelor la frnare
n cadrul acestui subparagraf se va analiza raportul existent ntre forele cu
care se acioneaz asupra pedalei de frn i forele de frnare propriu zise. n cazul
sistemelor de frnare, la care forele cu care acioneaz piciorul se transmite
mecanic sau, de cele mai multe ori hidraulic fr amplificare suplimentar prin
mecanisme servo se nregistreaz o funcie liniar:
rel a f f p
a G F F F = +
2 1
(9.50)
Sistemul de frnare trebuie ns s fie astfel conceput i construit nct, cu
fore reduse la pedal s se obin un efect de frnare mai mare, corespunztor
limitelor impuse de aderen.
Dar, innd seama de relaia 9.50, care ne spune c odat cu creterea greutii
automobilului, G
a
, trebuie s
creasc i fora la pedal, este
necesar ca fora muscular a
conductorului s fie ajutat de
fore suplimentare auxiliare
(sub presiune n cazul
autoturismelor). Forele
auxiliare, pot aciona numai
pn la o anumit mrime, peste
care fora de frnare sumar,
2 1
f f
F F + , poate s creasc
numai prin fora muscular. n
figura 9.11, se prezint
dependena dintre fora la
pedal, F
p
, i forele de frnare
a unui sistem de frnare cu
acionare hidraulic.
Exist aa zisa frnare cu
fora exterioar la care nu exist
nici o legtur prin for
ntre pedala de frn i frna
propriu zis; piciorul conductorului auto acioneaz asupra unui dispozitiv de
comand. Caracteristica unui asemenea sistem de frnare este reprezentat tot n
figura 9.11, n funcie de presiunea hidraulic din sistem. Dac se atinge presiunea
maxim, nu se poate obine o ncetinire mai mare a automobilului chiar dac va
crete fora de acionare a pedalei cu piciorul.
9.7. Distribuia ideal a forelor de frnare
franare cu
forte exterioare
momentul in
care forta
auxiliara nu
mai poate fi
crescuta
forta
auxiliara
forta
musculara
forta musculara maxima
F
p
f1 f2
F + F
f1
F
f2
F
f1 f2
F + F
f1
F
f2
F
Fig.9.11.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
164
Dup cum rezult din figura 9.9, gradul de calitate al frnei
max rel
a este
egal cu 1, numai pentru anumite valori ale coeficientului de aderen, , i pentru
un raport constant al forelor de frnare; pentru alte valori ale lui nu se mai
asigur spaiul de frnare cel mai mic posibil. n acest caz, apare ntrebarea cum ar
trebui s fie repartizate forele de frnare pe puni, pentru ca gradul de calitate,
max rel
a s fie egal cu 1, pentru orice valoare a coeficientului de aderen.
Aceast condiie este ndeplinit atunci cnd raportul dintre fora de frnare i
sarcina pe punte este acelai; la ambele puni, pentru orice deceleraia i prin
aceasta, pentru orice valoare a coeficientului de aderen, .
f f f
R
f
R
f
Z
F
Z
F
id id
= =
=
2 1
2
2
1
1
(9.51)
ntruct, sarcinile pe puni
1
R
Z i
2
R
Z , sunt cunoscute sub o form simplificat
conform relaiilor 9.41 i 9.42 ntre cele dou fore de frnare exist
urmtoarea relaia:
rel
g
rel
g
rel
g
a R
rel
g
a R
f
f
a
L
h
L
a
a
L
h
L
b
a
L
h
G Z
a
L
h
G Z
F
F
st
st
id
id
+
=
+
=
2
1
2
1
(9.52)
n figura 9.12 aceast corelaie este reprezentat printr-un exemplu concret. Se
observ c puntea din fa este frnat mai puternic, dect puntea din spate, n
msura n care crete deceleraia. Aceast distribuie a forelor de frnare pe puni
se numete distribuie ideal. Nu nseamn ns c, n funcie de fora la pedal
exist o singur soluie de repartizare ideal, pentru c teoretic se pot imagina o
infinitate de soluii.
Variaia forei de frnare ce acioneaz la puntea din spate,
2
f
F , n funcie de
fora la pedal, F
p
, poate fi i o dreapt ca n figura 9.9, dar n acest caz, fora de
frnare ce acioneaz la puntea din fa,
1
f
F , reprezint o curb progresiv (fig.
9.13a), sau
1
f
F , variaz n funcie de F
p
, dup o dreapt, i atunci
2
f
F capt o
form curb progresiv (fig.9.13). n primul caz, prin creterea forei de frnare la
puntea fa,
1
f
F , se confer i forei totale de frnare,
2 1
f f
F F + , i ca urmare i
deceleraiei a variaiei progresiv, n funcie de fora la pedal. Rezult c la valori
mici ale forei la pedal, modificarea acestei fore determin variaii mici ale forei
de frnare specific, . Aceasta ar putea nsemna c un automobil astfel conceput,
poate fi frnat n mod corespunztor, chiar i pe ghea neted. Atunci cnd fora la
pedal este mare situaia se inverseaz. n cel de-al doilea caz, fora de frnare la
puntea din fa crete liniar cu fora la pedal, F
p
, iar fora de frnare la puntea din
Dinamica frnrii autovehiculelor
165
spate,
2
f
F , i suma
2 1
f f
F F + , variaz
regresiv. nseamn c se poate obine o
deceleraie mai mare i deci i o utilizare
mai eficient a aderenei chiar la valori
mici ale forei la pedal.
Se poate imagina i un al treilea caz
al repartiiei ideale a forelor de frnare,
respectiv o variaie liniar a forei de
frnare specifice, , a deceleraiei sau a
sumei
2 1
f f
F F + n raport cu fora la
pedal. n acest caz cele dou fore
1
f
F ,
2
f
F , nu sunt liniare, variaia forei de
frnare la puntea din fa,
1
f
F , trebuie s
fie cresctoare, iar fora de frnare la
puntea din spate,
2
f
F , descresctoare.
Cazurile prezentate mai sus sunt
speciale; dar se poate imagina o
desfurare oarecare a uneia dintre forele
de frnare, variaia celeilalte fiind
reprezentat corespunztor n fig.9.12.
Cnd se trateaz ns, n ansamblu
automobilul, este important s se
cunoasc corelaiile dintre fora la pedal,
forele de frnare i deceleraia. Pentru
distribuia ideal a forei de frnare, la
care forele de frnare specifice trebuie s
fie egale la toate roile, pentru orice
valoare a deceleraiei trebuie s se
respecte relaia 9.52., care coreleaz
raportul dintre
id
f
F
1
i
id
f
F
1
. De aceea
este util reprezentarea din figura 9.14, n
care forele de frnare sunt trecute pe
axele de coordonate, iar ca parametru
variabil este folosit deceleraia relativ.
n aceast diagram s-a inclus i
repartiia constant a forei de frnare
(adic distribuia liniar) ca n figura 9.9,
i se poate determina prin compararea cu
Ga=1000daN, ZR1st=500daN,
Zr2st=500daN
L=2,4m, a=1,2m, b=1,2m,
hg=0,6m
0
0,2
0,4
0,6
0,8
1,0
0
200
400
600
800
1000
0
0,2
30
200
0,4
0,6
0,8
1,0
400
600
800
1000
10 20
0,2 0,4 0,6 0,8 1,0
0,5
0
2.0
1,0
1,5
2,5
3,0
F / F
f1 id f2 id
f1
F
f2
F
F + F
f1 f2
a
rel
F
f2
f1
F
F + F
f1 f2
Fig.9.13.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
166
curba ideal, la care din puni exist pericolul de suprafrnare, adic de blocare a
roilor respective.
n ultimul timp se
caut tot mai mult ca la
automobilele de
persoane s se apropie
repartizarea forelor de
frnare de o
caracteristic liniar
frnat, aa cum este
reprezentat n
fig.9.15.a, i anume,
prin folosirea unor
dispozitive numite
corectarea de frnare,
2
f
F , la puntea din spate
n comparaie cu forele
de frnare,
1
f
F , de la
roile punii din fa
(fig.9.15.b). trecerea de la o cretere la alta, n raport cu punctul de frnare, poate fi
controlat prin modificarea presiunii hidraulice sau se poate produce automat,
corespunztor unei anumite deceleraii.
Fig.9.15.
0
,
1
0
,
2
0
,
3
0
,
4
0
,
5
0
,
6
0
,
7
0
,
8
0
,
9
1
,
0
d
e
c
e
l
e
r
a
t
i
e
r
e
l
a
t
i
v
a
d
i
s
t
r
i
b
u
t
i
e
l
i
n
i
a
r
a s
e
b
l
o
c
h
e
a
z
a
m
a
i
i
n
t
a
i
p
u
n
t
e
a
f
a
t
a
distributie
ideala
0,8 0,6 0,4 0,2
0
0,1
0,2
0,3
f2 a
F / G
f1 a
F / G
Fig.9.14.
d
e
c
e
le
r
a
t
ie
r
e
la
t
iv
a
d
is
t
r
ib
u
t
ie
lin
ia
r
a
0
,
7
distributie
ideala
0,1
0
0,2
0,3
0
,
3
0
,
1
0
,
2
0,2 0,4
0
,
6
0
,
5
0
,
4
1
0
0,8 0,6
0
,
8
0
,
9
distributie
liniar-franata
daN
F / G
f1 a
F / G
f2 a
30
20 10 0
400
200
800
600
f2
F
f1
F
F + F
f1 f2
p
F
punct de frangere
a
b
Dinamica frnrii autovehiculelor
167
9.8. Proiectarea distribuiei forelor de frnare
Revenind la repartiia liniar (constant) a forelor de frnare analizate n
paragraful 9.7, aa cum este prezentat n fig.9.14, ne punem ntrebarea dup ce
criterii se stabilete valoarea raportului i.
n general, raportul forelor de frnare la autoturisme este astfel ales, nct la o
anumit deceleraie relativ, 85 , 0 8 , 0 K =
rel
a , s se obin gradul de calitate egal
cu unu ( ) 1 =
max rel
a pentru automobilul echipat la plecare numai cu ofer, adic
s existe la ambele puni aceeai for de frnare specific, la deceleraia
menionat mai sus. Pentru calculul raportului i se poate folosi i relaia empiric
17 . 0 =
L
a
i
rel
(9.53)
care corespunde relaiei 9.47, cnd 85 , 0 8 , 0 K = , i 20 , 0 21 , 0 K = L h
g
.
Cu un astfel de raport al forelor de frnare, care este mai mic dect cel din
figura 9.9, se obine blocarea roilor din spate, pentru valori mai ale coeficientului
de aderen; de exemplu, n cazul caracteristicilor frnare vitez, artate n figura
9.10.b, c pe un drum uscat la viteze mai mari de 50 km/h se vor bloca mai nti
roile punii din fa.
Aceast concepie care evit blocarea roilor punii spate ntr-un anumit
domeniu destul de mare al coeficientului de aderen, , este preferat, deoarece
blocarea roilor din spate produce o instabilitate a automobilului (rotirea n jurul
axei verticale) greu de redresat de ctre un conductor auto obinuit.
n fig.9.16., se va arta cum se produce instabilitatea menionat mai nainte.
Prin urmare, n fig.9.16.a, roile din fa, frnate cu fora,
1
f
F , se mai rotesc i fora
de frnare specific, nc nu ajuns la valoarea specific coeficientului de aderen,
, (valoarea maxim), n timp ce la roile din spate, s-a depit valoarea acestuia i
alunec. Dac, dintr-un motiv oarecare, fora de inerie,
a a
m G
t
x
m =
2
2
0
d
d
, nu mai
acioneaz n direcia longitudinal a automobilului, ci formeaz un unghi ,cu axa
longitudinal, apare o component F
y
, care este dispus perpendicular fa de axa
longitudinal i este echilibrat de forele de ghidare lateral, Y
1
, ce acioneaz la
roi.
Deoarece roile din spate alunec, fora de ghidare lateral poate s acioneze
practic numai la roile din fa. Momentul acestor fore:
a F a Y
y
=
1
,
accelereaz automobilul, n micarea de rotaie, n jurul axei verticale i sporete
prin aceasta, micarea de rotaie iniial produs prin apariia unghiului . Dac,
ns, sunt blocate roile din fa (fig.9.16.b) la aceeai perturbaie, rezult un
moment, b Y
2
, ce rotete automobilul n sens invers, i ca urmare micoreaz
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
168
unghiul , iar automobilul se va deplasa cu roile din fa alunecnd n direcia
iniial de micare.
a) b)
Fig.9.16.
Pentru deplasarea automobilului n linie dreapt, (rectilinie) este deci,
preferat blocarea roilor din fa. Dac, n schimb, n timpul deplasrii ntr-o
curb, se blocheaz roile punii din fa, automobilul va derapa i va iei din
traiectoria impus de conductorul auto. n aceast situaie, trebuie s se blocheze
mai nti roile de la puntea din spate pentru a menine capacitatea de control a
roilor din fa, directoare. n bibliografia de specialitate se susine c i la
deplasarea rectilinie s-ar putea corecta derapajul prii din spate a automobilului
prin acionarea corespunztoare a sistemului de direcie.
Cercetrile au artat ns, c un ofer care frneaz brusc i puternic, obligat de
situaii neprevzute, astfel nct roile se blocheaz, nu reuete de cele mai multe
ori n momentul n care ncepe deraparea - contracareaz aceast derapare prin
acionarea direciei; sau nu reuete s acioneze suficient de rapid, ba chiar
acioneaz n sens corect. La fel se ntmpl i cnd n schema situaiei n loc s
elibereze dup acionare, pedala de frn continu s o in apsat. Eliberarea
pedalei de frn, sau o apsare uoar este lucrul cel mai simplu, pentru c n acest
caz roile care nainte s-au blocat ar putea prelua din nou fore laterale i s-ar putea
nltura sau prentmpina deraparea.
f2
F
f2
F
f1
F
f1
F
1
Y
F
y
dt
dx
m
g
c c
g
y
F
a
b
m
dt
dx
Y
2
Dinamica frnrii autovehiculelor
169
Fig.9.17.
n fig.9.17 s-a modificat repartizarea forelor de frnare ale automobilului din
fig.9.9, astfel nct puntea din spate s se blocheze numai pentru >0,85. conform
relaiei 9.47, raportul constant va fi:
29 , 0 85 , 0 25 , 0 5 , 0 = i
Avantajul obinut n aceast concepie are ns, i dou dezavantaje, i anume:
pe de o parte, se micoreaz deceleraia relativ maxim, a
rel max
, n raport cu
deceleraia ideal, a
rel id
= , la raporturi de valori mici ale forei de frnare
specifice (deci, aderena nu este bine utilizat), iar pe de alt parte, la frnrile cele
mai frecvente ntlnite n domeniul deceleraiilor reduse, se utilizeaz, n principal,
frnele roilor din fa. Aceste dezavantaje pot fi nlturate dac se realizeaz
caracteristica liniar frnat artat, n fig.9.15.
Conform fig.9.17.d, gradul de frnare ideal se atinge la =0,85, iar punctul de
frngere al caracteristicii se deplaseaz la a
rel
=0,4, n aa fel, nct n domeniul >
0,85, s se blocheze ntotdeauna mai nti roile punii din fa. Aa cum se arat n
fig.9.17.a, la deceleraiile de intensitate medie sunt mai mult solicitate frnele
roilor din spate, iar n figurile 9.17.b i c, se observ c forele de frnare specifice
sunt egale la roi.
1000
dr. uscat
1,0
c
1200
1,2
b
blocheaza
puntea spate
0,2
dr. ghiata
800
0,8
600
0,6
zapada
tare
400
0,4
200
0,2
blocheaza
puntea fata
rel_max
a
f1
R1
Z
0,6
0,4
f2
Z
R2
0,8
0
,4 0
,5
d
e
c
e
le
ra
tie
re
la
tiv
a
0,1
0,6 0
,1 0
0,2
0
,3
0
,2
0,4
F / G
f1 a
0,8
f1
linear
franata
0
,9
200
d
F / G
f2 a
0,4
0,8
1,0
0,6
0,2
0,3
0,2
0 10
ideal
0
,7
0
,6
0
,8
20 30
600
400
a
800
daN
f1 f2
F
F + F
1
,2
1
,1
1
,0
F [daN]
p
f2
F
G
a
=1000 daN; Z
R1st
=500 daN; Z
R2sr
=500 daN;
L=2,4 m; a=1,20 m; b=1,20m; h
g
=0,6 m
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
170
9.9. Forele de frnare specifice la sarcin variabil
Analizele fcute pn acum, au avut n vedere o anumit stare de ncrcare a
automobilului i a roilor. Deoarece ncrcarea automobilelor este variabil, trebuie
s avem n vedere i influena acesteia asupra procesului de frnare. Se pornete de
la exemplul prezentat n fig.9.17, adic automobilul exemplificat este gol, doar cu
oferul.
Fig.9.18.
Se va ncrca automobilul, n aa fel nct poziia centrului de greutate s nu se
modifice nici n direcia longitudinal (a/L=const) i nici pe vertical(h
g
/L =const).
O astfel de situaie se poate imagina la un autoturism cu 5 locuri, cu motorul dispus
n fa. De asemenea, nu se modific nici forele de frnare, att una fa de cealalt
ct i un raport cu fora la pedal (fig.9.18). Datorit faptului c, centrul de greutate
i menine poziia, variaia gradului de calitate al frnei: a
rel max
/ nu se modific n
raport cu coeficientul de aderen, , fiind acelai att pentru automobilul gol, ct
d
e
c
e
le
ra
tie
re
la
tiv
a
0
,5
0
,4
0
,1 0
0,4
0
,3
0
,2
0,2 0,6
f1 a
F / G
0,8
0
1,0
0,6
0,8
0,2
0,4
R2
R1
blocheaza
puntea spate
blocheaza
puntea fata
dr. uscat
1000
c
1200
1,2 1,4 1,0
b
0,8
dr. ghiata
800
0,6
600
zapada
tare
200
0,2 0,4
400
f1
0,2
0,4
f2
0,6
0,8
Z
Z
1
,0
0,2
0,1
d
0,3
10
f2 a
F / G
linear
franata
ideal
0
,8
0
,7
0
,6
0
,9
20 30
a
F
f1
f1 f2
F + F
1
,1
1
,2
F [daN]
p
F
f2
200
400
600
800
1000
1200
1400
1600
1800
1,0
1,2
G
a
=1500 daN; Z
R1st
=500 daN; Z
R2sr
=500 daN;
L=2,4 m; a=1,20 m; b=1,20m; h
g
=0,6 m
Dinamica frnrii autovehiculelor
171
i pentru cel ncrcat. S-a modificat ns, sensibil, dependena deceleraiei, a
rel
, fa
de fora la pedal, F
p
.
Datorit greutii mai mari a automobilului ncrcat, conductorul auto trebuie
s apese pe pedala de frn la automobilul ncrcat nu este prea mare, la
automobilul gol se acioneaz mai slab. n mod normal ns, se modific poziia
centrului de greutate n urma ncrcrii automobilului, mai ales n direcia
longitudinal. n fig.9.19 sunt prezentate diagramele pentru un automobil la care
fora de exemplul din fig.9.18 ncrctura de 500 [daN] este dispus n proporie
de 80% n partea din spate a automobilului, adic ncarc puntea din spate.
Fig.9.19.
Aceast situaie este ntlnit la autoturismele cu 5 locuri, cu motorul n fa i
cu portbagajul n spate. Prin deplasarea spre partea din spate a centrului de
greutate, raportul a/L devine mai mare, h
g
/L se consider constant, se realizeaz,
conform relaiei 9.47 i a figurii 9.19.c, deceleraia relativ ideal la =1,24.
aceasta nseamn c, la automobilul ncrcat se vor bloca ntotdeauna mai nti
puntea din fa, i ca urmare automobilul va fi stabil. n schimb, frnele roilor din
fa vor fi mai solicitate dect frnele roilor din spate, iar deceleraia maxim
posibil este destul de redus ntr-un domeniu larg al coeficientului de aderen .
1600
blocheaza
puntea spate
1400
1,0
1000
dr. uscat
c
1400
1,4 1,2
1200
b
Z
R1
dr. ghiata
800
0,8
600
0,6
zapada
tare
400
0,4 0,2
200
0,2
blocheaza
puntea fata
f1
0,4
0,6
f2
Z
R2
0,8
1,0
0
,6
0
,7
0
,8
d
e
c
e
le
ra
tie
re
la
tiv
a
0,6 0
,1 0
0,1
0
,5
0,2
0
,3
0
,2
0
,4
0,4 0,8
F / G
f1 a
f1
0
,9
linear
franata
400
d
0,2
0,8
1,0
0,4
0,6
0,2
F / G
f2 a
0,3
0
200
10
ideal
20 30
1000
600
a
800
1200
F + F
f1 f2
F
1
,1
1
,0
1
,2
F [daN]
p
f2
F
1,2 1800
40 50
G
a
=1500 daN; Z
R1st
=500 daN; Z
R2sr
=500 daN;
L=2,4 m; a=1,20 m; b=1,20m; h
g
=0,6 m
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
172
n mod normal, n cazul unei distribuii fixe a forelor de frnare i cu poziia
centrului de greutate deplasabil, caracteristica de greutate deplasabil,
caracteristica de calitate a instalaiei de frnare se va modifica:
( )
f
a
rel
=
deci, va trebui s vedem n continuare cum se poate adopta n condiii optime,
repartizarea forelor de frnare la starea de ncrcare a automobilului. n acest sens,
va trebui ca forele de frnare s poat fi reglate (corectate) proporional cu
sarcinile dinamice ale roilor, deci:
rel
g
a R R f
rel
g
a R R f
a
L
h
G Z Z F
a
L
h
G Z Z F
st id
st id
=
+ =
2 2 2
1 1 1
(9.54)
Se are n vedere n acest mod, nu numai modificrile statice de sarcin,
st
R
Z
1
,
i ca urmare modificarea greutii G
a
, ci i modificarea h
g
, a nlimii centrului de
greutate, precum i ncrcarea variabil a punilor datorit decelerrii
automobilului. Despre aceast distribuie a forelor de frnare s-a mai aminti i prin
relaia 9.52.
Acest mod de modificare a forelor de frnare este denumit corectare
dinamic a forelor de frnare deoarece are n vedere i fenomenul dinamic , nu
numai cel static. Corectarea sau reglarea dinamic a forelor de frnare nu este o
problem uoar, deoarece, n timpul creterii forei de frnare, corectorul trebuie
s reacioneze la decelerrile variabile, respectiv la efectele acestora i s le
compenseze n mod corect. De aceea, se apeleaz la o cale tehnic mai simpl,
reglndu-se distribuia forei de frnare numai static. n reglarea static, forele de
frnare sunt proporionale cu sarcinile statice ale roilor:
st
R f
Z F
1 1
,
st
R f
Z F
2 2
(9.55)
iar de modificarea nlimii centrului de greutate nu se va ine seam. Rezultatele
sunt exemplificate n fig.9.20.
Fora de frnare la puntea fa de cea corespunztoare automobilului gol;
sarcina la puntea fa n raport cu automobilul nencrcat a devenit 600/500 adic
9/5. Prin aceasta, se obine o variaie a gradului de calitate a frnei n raport cu
coeficientul de aderen , apropiindu-se foarte mult de situaia obinuit la
autovehiculul gol din fig.9.17.c. Prin urmare se poate stabili cu ajutorul reglrii
statice a forelor de frnare, se egalizeaz modificarea ncrcrii, respectiv
deplasarea centrului de greutate n aa fel nct raporturile forelor de frnare
specifice s rmn aproximativ aceleai. n exemplu prezentat mai sus, la care se
modific n principal sarcina pe puntea din spate n scopul economisirii instalaiei
de corectare se modific probabil numai fora de frnare la puntea din spate.
Corectarea frnrii n funcie de sarcin se poate realiza i dup caracteristici
Dinamica frnrii autovehiculelor
173
liniare frnte. Cu ajutorul corectrii n funcie de sarcin a forelor de frnare,
1
f
F i
2
f
F , se poate ncerca obinerea unei astfel de variaie a forelor de frnare n
raport cu fora la pedal, F
p,
nct independent de starea de ncrcare, fora la
pedal s fie proporional cu deceleraia(vezi fig.9.20 i 9.17). Avantajul acestui
fapt, este c dac fora la pedal este proporional cu forele de frnare,
2 1
f f
F F = ,
atunci la automobilul gol este necesar o for la pedal mai mic dect la
automobilul ncrcat, n condiiile obinerii aceleai deceleraii. Cu ct diferenele
de sarcini sunt mai mari (de exemplu de 2 ori) cu att este mai mare i raportul
dintre forele la pedal (adic tot de dou ori) la care se adaug i diferenele dintre
deceleraiile maxime posibile, determinate de starea cii de rulare i a pneurilor de
tipul instalaiei de frnare i de deceleraia dorit de ofer.
Fig.9.20.
9.10. Corelarea deceleraiei dintre automobilul ce tracteaz i remorc
Pn acum s-a realizat corelarea forelor de frnare la automobilele cu dou
puni. n continuare se va trata, pe scurt, problema frnrii la un automobil ce
0,2
dr. uscat
1000
1,0
c
1,4
1200
1,2
dr. ghiata
800
0,8
600
0,6
zapada
tare
400
0,4
200
0,2
0
,9
0,6
0
,4 0
,5
0,1
d
e
c
e
le
ra
tie
re
la
tiv
a
0
,1 0
0
,3
0,2
0
,2
0,4
d
f2 a
0,4
1,0
0,6
0,8
0,2
0,3
0
0,2
200
F / G
10
linear
franata
ideal
0
,7
0
,6
0
,8
20 30
f1 a
F / G
0,8
1
,0
1
,1
1
,2
40
F [daN]
p
50
1400
b
f1
R1
Z
blocheaza
puntea fata
0,6
0,4
f2
R2
Z
0,8
blocheaza
puntea spate
1,0
1,2
F + F
f1 f2
400
a
800
600
1200
1000
1600
1800
f2
F
F
f1
G
a
=1500 daN; Z
R1st
=500 daN; Z
R2sr
=500 daN;
L=2,4 m; a=1,20 m; b=1,20m; h
g
=0,6 m
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
174
tracteaz i remorc, deci a dou vehicule. oferul din automobil frneaz att
acest automobil de greutate G
a
, ct i remorca, de greutate G
r
. Suma forelor de
frnare, F
f
, la automobilul ce tracteaz, dar ruleaz singur, ofer o deceleraie:
a
f f
a
f
rel
G
F F
G
F
a
a
2 1
+
= = (9.56)
iar forele de frnare pentru remorc, F
fr
, dac ar rula singure ar oferi o deceleraie:
r
fr fr
r
fr
rel
G
F F
G
F
a
r
2 1
+
= = (9.57)
n fig.9.21. sunt ilustrate forele de frnare la automobilul ce tracteaz i la
remorc, cu greutile corespunztoare, G
a
i G
r
.
Fig.9.21.
Deceleraia total a convoiului automobil +remorc este:
r a
a
rel
r a
a
rel
r a
fr f
rel
G G
G
a
G G
G
a
G G
F F
a
r a
+
+
+
=
+
+
= (9.58)
O frnare diferit ntre automobilul ce tracteaz i remorc este nedorit,
deoarece n acest caz automobilul ce tracteaz ar trebui s preia o parte a forelor
de frnare ale remorcii sau invers. Aceasta ar nsemna s se manifeste ntre cele
dou vehicule o for de reaciune, D. Dac remorca este frnat mai puin, atunci
fora se deplaseaz lateral n cazul unei curbe sau a modificrii deplasrii
rectilinii automobilul ce tracteaz (vezi fig.9.22) i ntregul convoi se nclin spre
rsturnare. De aceea, este necesar s se asigure
r a
rel rel
a a = ,
r
fr
a
f
G
F
G
F
= (9.59)
adic, forele de frnare trebuie s fie repartizate proporional cu greutatea
automobilului ce tracteaz i respectiv, cu greutatea remorcii.
Modificarea greutii celor dou componente ale convoiului datorit variaiei
sarcinii trebuie astfel realizat (vezi fig.9.22), nct:
fr f
a
r
F F
G
G
= (9.60)
v
f2
F F
f1
F
fr1
F
fr2
G
a
G
r
Dinamica frnrii autovehiculelor
175
Fa de cele prezentate mai sus, trebuie s se rein dou aspecte importante:
1. ntre fora de frnare ce acioneaz la remorc i fora de frnare a
automobilului ce tracteaz, trebuie s existe un raport de proporionalitate;
2. dac, aa cum este uzual, numai remorca are dispozitiv de corectare a
frnrii n raport cu ncrcarea, atunci corectarea sa este dependent nu
numai de greutatea remorcii, ci i de raportul dintre greutile
automobilului ce tracteaz i remorci. Dac reglarea este independent de
ncrcarea automobilului ce tracteaz, trebuie corelate pentru aceasta,
forele de frnare cu sarcin.
Fig.9.22.
Dispozitivele de corectare automat sunt utile numai dac se utilizeaz la
ambele vehicule, care formeaz convoiul. n fig.9.23, se arat dependena ideal a
forei de frnare a remorcii, de fora de frnare a automobilului tractat, pentru
diferite raporturi ale greutilor G
a
i G
r
.
9.11. Roata blocat
n analiza procesului de frnare fcut pn acum, s-a considerat ca parametrii,
precum: fora la pedal, forele de frnare, deceleraia relativ (att n micarea de
translaie, ct i n cea de rotaie), sarcinile pe roi i forele de frnare specifice
sunt constante n timp.
Cu toate acestea, s-a menionat deseori despre suprafrnare i blocare,
deci despre fore la pedal i accelerri ce se modific n raport cu timpul, acestea
cu scopul de a evidenia faptul c deraparea i alunecarea roilor pot duce la situaii
periculoase. n acest paragraf, se va prezenta trecerea de la situaia roii care nc
mai ruleaz la situaia cnd roata alunec. Pentru aceasta, trebuie s avem n vedere
urmtoarele:
Gr/Ga
D
fr
F
F
f
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
176
1. ne sunt necesare ecuaiile de micare ale roii (capitolul 4), n special
relaiile ntre momentul forelor de micare,
2
2
d
d
t
I
R
, momentul de
frnare, M
f
, reaciunile tangeniale, X sau F
f
, i sarcina pe roat, Z
R
;
2. sunt necesare curbele de dependen dintre forele tangeniale specifice i
alunecare, care ne ofer definirea alunecrii, precum i raportul dintre
viteza de deplasare a automobilului i viteza unghiular a roii;
3. trebuie evideniat dependena dintre fora la pedal F
p
respectiv a
momentului de frnare M
f
i timpul t;
4. din ecuaiile de micare ale automobilului ntreg, rezult din modificarea
momentelor de frnare n timp i modificarea deceleraiilor,
2
2
d
d
t
x
i
2
2
d
d
t
ca urmare a precizrilor fcute mai sus, se modific i sarcina pe
roat, Z
R
.
Din aceast niruire, rezult c tratarea prin relaii matematice a automobilului
cu roata blocat nu este uoar. Pentru a putea ajunge la o concluzie cu metode mai
simplificate, vom apela la unele simplificri care nu influeneaz utilitatea
rezultatelor. Se va obine n acest fel, o imagine destul de bun asupra mririi
deceleraiilor unghiulare i a duratei lor n timpul n care roata trece de la rulare la
alunecare. n acest fel, vor fi posibile i aprecierile cu privire la cerinele impuse
dispozitivelor de mpiedicare a blocrii roilor frnate.
Simplificrile sunt urmtoarele:
a) deceleraia n micarea de translaie se consider zero, 0
d
d
2
2
=
t
x
const v
t
x
= =
d
d
avnd n vedere c fenomenul de blocare a roii are loc n
timp foarte scurt, eroarea produs de aceast simplificare nu este prea
mare;
b) sarcina pe roat, Z
R
= constant;
c) curba care indic dependena dintre fora tangenial specific, , i
alunecarea, a, este mprit n dou poriuni drepte (fig.9.24) pentru a se
permite tratarea matematic a problemei, respectiv
Domeniul
c
a a 0 :
a
a Z
F
c R
f
f
= = (9.61)
i domeniul 1
c
a a :
a
a Z
F
c R
f
f
= = (9.62)
Dinamica frnrii autovehiculelor
177
n relaiile 9.62 i 9.62, pentru reaciunea tangenial negativ, conform
relaiilor 9.13 s-a introdus fora de frnare.
d) se consider faptul c n fig.9.24, curba este valabil i pentru valori
variabile n timp
ale alunecrii.
Creterea forei la
pedal, respectiv
creterea
momentelor de
frnare este
proporional cu
timpul (fig.9.25).
t c M
f
= (9.63)
Aceste trei relaii se
ntrunesc n ecuaia de
micare a roii 1.3 (tratat la
capitolul 1):
d f f R
r F M
t
I + =
2
2
d
d
(9.64)
n care s-a introdus din fora de frnare, F
f
, n locul reaciunii tangeniale negative,
X, i n care s-a neglijat momentul rezistenei la rulare, M
r
.
Pentru alunecare, trebuia s mai folosim i relaia alunecrii:
0
1
R
R
a
= (9.65)
precum i relaia dintre viteza de deplasare i viteza unghiular a roii:
0 0
d
d
R r
r
t
x
v = = (9.66)
nainte de a cuta soluia
ecuaiilor, vom analiza, mai nti,
curbele regulate din fig.9.26. conform
fig.6.26.a, viteza de translaie a
automobilului este constant n timp,
iar conform fig.6.26.b, momentul de
frnare crete liniar.
n fig.9.26 este prezentat, printr-
un exemplu numeric, dependena unor
parametrii ai procesului de frnare n
timp, n cazul unei roi blocate:
a) viteza de deplasare;
a
1
c
a
a
Fig.9.24.
t
f
M
Fig.9.25.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
178
b) creterea momentului de frnare;
c) descreterea vitezei unghiulare a roii;
d) alunecarea;
e) deceleraia unghiular a roii.
Dup timpul t
c
se depete coeficientul de aderen, iar dup timpul t
c
+t
o
*
roata se blocheaz, viteza
unghiular a roii,
R
, (fig.9.26.c)
scade de la valoarea iniial,
0
R
,
i atinge dup timpul t
c
, valoarea
c
R
, la care se obine valoarea
maxim a coeficientului de
aderen, pe curba din fig.9.24.
Alunecarea corespunztoare
coeficientului , de valoare
maxim a
c
, ne indic, c din acest
moment, roata ncepe s fie blocat
i coeficientul de aderen ncepe
s scad de la la
a
(fig.9.24) i,
n plus, oferul, care nu sesizeaz
blocarea, continu s acioneze pe
pedala frn (fig.9.26.d i 9.26.b)
i, ca urmare, viteza unghiular a
roii se reduce rapid la valoarea 0
i alunecarea la valoarea 1.
Deceleraia unghiular atinge
conform fig.9.26.c n primul
domeniu al alunecrii, rapid
valoarea
c
t
2
2
d
d
, n domeniul al
doilea crete n continuare, i
atinge ca mrime absolut
valori foarte mari. n roata care nu
se mai rotete ( 0 =
R
, 0
d
d
2
2
=
t
),
momentul de frnare este conform
relaiei 9.64:
d R a d f f
r Z r F M = =
0
36
72
108
-200
-100
0
0
20
40
60
80
0
0,2
0,4
0,6
0,8
1,0
-800
-700
-600
-500
-400
-300
-200
-100
0
0 0,1 0,2 0,3 0,4 0,5
t[s]
a
b
c
d
e
[km/h]
[daNm]
a
r
dt
d
[rad/sec]
[rad/sec]
M
f
Fig.9.26.
Dinamica frnrii autovehiculelor
179
9.11.1. Domeniul n care alunecarea este
c
a a 0
Folosind relaiile 9.61, 9.63, 9.64 i 9.65 se obine ecuaia diferenial:
t
I
c
I a
r Z
I a
r Z
t
R R c
d R
R R c
d R
=
+
0
2
2
d
d
(9.67)
iar soluia este:
( )
=
0
0
0 exp
1
1 1
R R c
d R
d R
R R c
d R
c
R
R
I a
r Z
r Z
I a
t
r Z
a c t
(9.68)
Funcia exponenial este important ntr-un timp foarte mic, respectiv n timpul
trecerii de la viteza unghiular,
R0
, la
R
, n descretere liniar, fig.9.26.c, deci
relaia 9.68 devine:
( )
d R
c
d R
R R c
R
R
r Z
a c
t
r Z
I a c
t
+ =
2 2 2
2
0
0
1 (9.69)
Dependena temporal a alunecrii se poate obine din relaia 9.65, iar dependena
temporal a deceleraiei unghiulare se poate obine prin diferenierea expresiei
9.68, care, n momentul trecerii prin funcia exponenial (relaia 9.69) este o
constant:
( )
d R
c
R
r Z
c a
t
t
0
2
2
d
d
(9.70)
Timpul t
c
, pn la atingerea valorii maxime a coeficientului de aderen, ,
respectiv a alunecrii corespunztoare:
0
1
R
R
c
a
= (9.71)
se calculeaz din ecuaia 9.69 cu o bun aproximaie:
a
r Z
r Z
I a
t
d R
d R
R R c
c
+
0
(9.72)
n acest timp, momentul a crescut la:
c c
t c M = (9.73)
iar deceleraia la:
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
180
d R
c
R
c
r Z
c a
t
=
0
2
2
d
d
(9.74)
9.11.2. Domeniul n care alunecarea este 1
c
a a
Prin introducerea n acest domeniu a variabilei t
*
, care se calculeaz cu
relaia:
c
t t t =
*
(9.75)
i folosind relaiile 9.62, 9.63, 9.64, 9.65 i 9.73, rezult o ecuaie diferenial, care
n ceea ce privete construcia sa, este identic cu ecuaia 9.67:
*
2
2
) (
) 1 (
) (
d
d
0
0
t
I
c
I
r Z
r Z
a c
I a
r Z
t
R R
d R a
d R
R c
R
R R c
d R a
+
+
=
+
(9.76)
soluia fiind:
( ) ( )
( )
( )
( )
( )
( )
( )
+ +
=
*
*
*
0
0
0
1
exp 1
1
t
I a
r Z
r Z
a I
t
c
r Z
r Z
c a t
R R c
d R a
d R a
a c R R
d R a
d R a
c
R
r
(9.77.a)
sau raportat la viteza unghiular,
c
R
se atinge la alunecarea a
c
i pentru
coeficientul de aderen (
max
):
( )
( )
( )
( ) ( )
( )
+
+ =
*
2 2 2
*
*
exp 1
1
1
t
I
r Z
r Z a
a I
t
r Z
c t
c
c
c
R R
d R a
d R c a
a c R R
d R a R
r
(9.77.b)
Deceleraia unghiular rezult din expresia 9.77.a:
( )
( )
( )
( )
( )
+
=
*
*
2
2
1
exp 1
d
d
0
t
I a
r Z
r Z
a c
r Z
a c
t
t
c
R R c
d R a
d R a
a c
d R
c
R
(9.78.a)
i prin introducerea deceleraiei unghiulare
c
t
2
2
d
d
i a vitezei unghiulare
c
R
n
relaia 9.78.a, se obine:
Dinamica frnrii autovehiculelor
181
( )
( )
( )
*
2
2
*
2
2
exp 1 1
d
d
d
d
t
I
r Z
a
a
t
t
t
c
R R
d R a
a c
a c
c
(9.78.b)
n acest al doilea domeniu, funcia exponenial are un rol mai important, din
care cauz nu se mai poate opera simplificarea fcut la relaia 9.68, ce
caracterizeaz primul domeniu. Datorit acestui fapt, nu se poate spune cu precizie
nici durata
*
0
t , n care se parcurge domeniul de alunecare de la a=a
c
, pn la a=1,
respectiv, n care viteza unghiular scade de la
c
R R
= , pn la 0 =
R
. Cu o
oarecare aproximare, se poate determina timpul
*
0
t , din relaia 9.77.b, cnd funcia
exponenial a fost dezvoltat. n aceast situaia, cu ( ) 0
*
0
*
= = t t
R
, timpul se
obine cu relaia:
( ) ( ) ( )
a c
R R
d R a c
R R c
d R a c
R R c
a c
I
r Z a
I a
r Z a
I a
t
c c c
+
+
2
2
*
0
(9.79)
9.11.3. Parametrii importani pentru fenomenul de blocare
n continuare, se va prezenta principalii parametrii ai blocrii roii, dup ce am
vzut cum variaz n timp viteza i deceleraia conform fig.9.26. este cunoscut
faptul c dispozitivele folosite pentru evitarea blocrii, ncep s lucreze n timpul
creterii momentului de frnare, atunci cnd se depete un anumit prag de
deceleraie. Pentru a reduce blocarea roii, momentul de frnare trebuie s fie redus
foarte repede. Pentru aceasta se va analiza diagrama deceleraiei din fig.9.26.c i se
va reine dou valori caracteristice i anume:
a) deceleraia unghiular,
c
t
2
2
d
d
, la care se atinge coeficientul de aderen,
respectiv la care tocmai se depete acest coeficient i cnd dispozitivul
antiblocare urmeaz s primeasc impulsuri pentru a aciona;
b) durata de timp, t
0
*
,
n care dispozitivul antiblocare trebuie s fi reacionat,
pentru evitarea sigur a alunecrii roii pe calea de rulare.
Deceleraia unghiular,
c
t
2
2
d
d
, depinde (vezi relaia 9.74) pe lng
caracteristicile roilor, Z
R
i r
d
, i de alte trei mrimi, i anume:
a) viteza unghiular iniial,
R0
;
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
182
b) variaia curbei de dependen a forei de frnare specific, (=
max
), de
alunecare, /a
c
, (mrimi date de caracteristicile pneurilor i a suprafeei
drumului);
c) de creterea momentului c, provocat de mrirea forei la pedala de frn.
Datorit acestui fapt, valoarea
c
t
2
2
d
d
oscileaz ntr-un domeniu foarte larg,
fenomen ce va fi explicat printr-un exemplu numeric ce se refer la o roat de
autoturism cu Z
R
=300[daN] i r
d
=0,3[m].
Viteza iniial
0
R
poate s varieze corespunztor vitezelor de deplasare de la
10 pn la 50[m/s], creterea momentului t r Z t r F t M c
d R d f
=
este cuprins ntre 100 i 500[daNm/s] (corespunztor unui moment de frnare
M=150[daN], dup timpul 25 , 0 0 , 1 K t ), iar din curbele cunoscute a forei de
frnare specifice, funcie de alunecare, putem afla pentru diferite suprafee ale
drumului, cuprinse n domeniul dintre suprafaa acoperit cu polei pn la suprafaa
uscat, adic 7 1K
c
a . dac se consider c aceste valori pot fi combinate ntre
ele fr nici o alt ngrdire, atunci rezult alte valori extreme:
75 , 1
d
d
d
d
min
2
2
max
2
2
=
c
c
t
t
Dac la combinare se ine seama de calitatea drumurilor ude sau uscate (
c
a este
n medie de 4,5) ca n cazul deplasrii cu viteze mari, frnarea se face cu grij,
alegndu-se creteri mici ale momentului de frnare prin fore la pedal potrivite) i
la deplasarea cu viteze mici, frnarea se face rapid, ca i n cazul deplasrii pe
drumuri acoperite cu polei sau cu zpad bttorit ( 1
c
a ), viteza s fie mic
prin meninerea lui c la valori reduse, atunci pentru ambele cazuri,
[ ]
2
2
2
s rad 40
d
d
c
t
.
Deoarece aceast valoare este greu de crezut, se calculeaz deceleraia
c
t
2
2
d
d
, n
aa fel nct s se obin deceleraia n micare de translaie (aceast deceleraie nu
are legtur cu deceleraia automobilului), astfel:
[ ] ] [ 2 , 1 s m 12
d
d
d
d
2
2
2
2
2
g
t
r
t
x
c
r
c
= =
pentru ] [ 3 , 0 m r
r
Dinamica frnrii autovehiculelor
183
Timpul
*
0
t , se poate calcula cu aproximaie din ecuaia 9.79, fiind de cteva
sutimi pn la zecimi de secund. Aceast mrime depinde n principal de viteza de
deplasare, respectiv de viteza unghiular,
0
R
, i de alunecarea a
c
.
10
MANIABILITATEA AUTOVEHICULELOR
10.1. Consideraii generale.
Sistemul alctuit din conductor-automobil formeaz un circuit de reglare.
Conductorul auto primete informaii de la automobil i calea de rulare, care, dup
prelucrarea informaiilor primite, impune automobilului prin intermediul direciei
traiectoria necesar. n circuitul de reglare cele mai importante componente sunt:
conductorul auto care recepioneaz informaiile, le prelucreaz i le transform n
mrimi de reglaj; sistemul de direcie care transmite mrimile de reglaj, ntr-un
mod ct mai potrivit, la roi i roile de direcie care orienteaz automobilul n
sensul dorit.
Manevrabilitatea reprezint capacitatea automobilului de a se deplasa n
direcia comandat, respectiv de a executa virajele dorite i de a menine mersul
rectiliniu, atunci cnd virajele nu sunt necesare. Maniabilitatea este capacitatea
automobilului de a fi uor manevrabil. n terminologia actual, noiunea de
manevrabilitate este nlocuit aproape n totalitate prin cea de maniabilitate,
punndu-se n eviden aspectul calitativ al manevrabilitii.
Maniabilitatea este influenat de caracteristicile mecanismelor direciei, de
parametrii principali ai automobilului (ecartament, ampatament, poziia centrului
de greutate, momente de inerie, suspensie), de profilul, natura i starea cii de
rulare, de condiiile atmosferice, de viteza de deplasare, etc. Numrul mare de
factori care influeneaz maniabilitatea face ca aprecierea acesteia s constituie o
problem extrem de complex. Acest lucru solicit impunerea unor ipoteze
simplificatoare, att pentru automobilul aflat n mers rectiliniu ct i pentru cel
aflat n viraj. Dac se ine seama numai de caracteristicile cii de rulare,
automobilul poate fi modelat ca n figura 10.1.
Acest model consider c rularea este identic att pentru roile din fa ct i
pentru cele din spate. Roata din spate 2 avnd tot timpul direcia cadrului
automobilului este legat de acesta printr-o cupl de rotaie, iar roata directoare 1
executnd i micare de pivotare se consider legat de cadru printr-o cupl
sferic.
Razele de virare sunt date de relaia:
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
184
max
min
tg tg
L
R
L
R = = (10.1)
n timpul deplasrii, n special la viraje, asupra automobilului acioneaz o
for transversal cauzat de vntul lateral, acceleraia centripet, nclinarea
transversal a cii de rulare (problem analizat la capitolul 3). Dup cum se tie,
pneul automobilului, fiind elastic, se va deforma sub aciunea forei transversale cu
unghiul de deviere lateral . Luarea n considerare a unghiurilor de deviere
lateral, face ca fenomenul maniabilitii s devin complex cu influene i asupra
stabilitii.
Pstrnd notaiile folosite la
capitolul 3, respectiv
1
unghiul de
deciere lateral al roii din fa i cu
2
unghiul de deviere lateral al
roii din spate, n funcie de poziia
centrului de virare
O , innd seama
de devierea lateral, pot aprea
urmtoarele cazuri (fig. 10.2.):
a) 0
2 1
= = ;
tg
L
R = ,
automobilul urmrete traiectoria
comandat i este cazul roilor
rigide n sens transversal;
b) 0
2 1
= ; unghiul sub care se
vede ampatamentul L din centrul
O este , deci
O aparine
cercului de diametru
0
OE , care
trece prin O ,
0
E i
0
F ; acest caz
poart denumirea de virare
corect sau virare neutr;
c)
2 1
> , centrul O se deplaseaz n
1
O n afara cercului de diametru
0
OE iar raza de virare crete; este cazul virrii insuficiente sau subvirrii,
cnd automobilul parcurge o traiectorie cu raz mai mare dect cea
comandat; pentru nscrierea automobilului pe traiectoria impus, este
necesar bracarea roii directoare cu un unghi mai mare ca , deoarece
puntea din fa are tendina de deplasare spre exteriorul curbei;
automobilul are deci tendina de meninere a traiectoriei iniiale, opunndu-
se nscrierii n viraj;
v
v
2
2
1
L
c
O
R
1
g
q
q
x
Fig.10.1.
Maniabilitatea autovehiculelor
185
d)
2 1
< , centrul O se deplaseaz n
2
O , n interiorul cercului, iar raza de
virare scade; este cazul virrii n exces sau supravirrii, cnd automobilul
parcurge o traiectorie cu raz mai mic dect cea comandat. Pentru
micarea pe traiectoria impus este necesar baracarea roii cu un unghi
mai mic dect , deoarece puntea din spate are tendina de a se deplasa
spre exteriorul curbei; automobilul are deci tendina de accentuare a
virajului.
Fig.10.2.
Raza de virare corespunztoare (fig. 10.2.):
( ) ( )
1 2 2 1
tg tg
+
=
L L
R , (10.2)
astfel c, dup cum
1 2
>
<
, rezult R R
<
>
, iar aproximaia din relaia (10.2) se
poate face doar pentru unghiuri de bracare mici. Se tie c automobilul cu puntea
motoare dispus n fa, n aceleai condiii de mers, are att maniabilitatea ct i
2
L
Fy
1
v
2
v
g
c
1
q
1
O
O
2
E
0
1
O
R
R
1
q
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
186
stabilitatea superioare automobilului cu puntea motoare dispus n spate, deoarece
fora de traciune acioneaz n planul longitudinal al roii i deci nu creeaz o for
transversal suplimentar.
Subvirarea i supravirarea pune n eviden fenomene interesante i n cazul
mersului rectiliniu sub aciunea unei fore transversale, cauzat de nclinarea
transversal a drumului sau de vntul lateral (
v
F ). Dup cum metacentrul
v
C
(punctul de aplicaie al forei vntului
v
F ) este naintea sau n spatele centrului
reaciunilor laterale
C (unde ar trebui s fie situat metacentrul pentru a avea virare
neutr, adic
2 1
= ) rezult cazurile
2 1
>
<
(fig. 10.3.).
Fig.10.3.
a) Metacentrul
v
C i centrul reaciunilor laterale
C se suprapun (fig. 10.3a).
n acest caz, automobilul se gsete n situaia de virare neutr
2 1
= , iar centrul
O se gsete la infinit pe o perpendicular la vitezele
2 1
v v . Nu se nregistraz
nici o schimbare a direciei axei longitudinale a automobilului, i, ca urmare, acesta
se va deplasa rectiliniu, dar nclinat fa de direcia iniial.
b) Metacentrul
v
C se afl naintea centrului reaciunilor laterale
C . Unghiul
de deviere lateral al roilor din fa este mai mare dect ce al roilor sin spate adic
2 1
> , auto-mobilul se afl n situaia de virare insuficient (fig. 10.3b). Punctul
0
E
v
2
v
F
0
c
v
c
1
1
2
E
0
0
F
v
1
v
2
O
c
v
g
c
c
F
v
F
F
c
v
1
v
O
c
F
F
v
F
0
c
g
y
x
v
2
v
c
c
0
E
Maniabilitatea autovehiculelor
187
O fiind pe partea opus vntului, de-plasarea automobilului este curbilinie n
sensul indicat de for.
c) Metacentrul
v
C se afl n spatele centrului reaciunilor laterale
C . Unghiul
de deviere lateral al roilor din fa este mai mic dect cel al roilor din spate adic
2 1
< , fiind cazul virrii n exces (fig. 10.3c). Punctul
O fiind nspre partea din
care acioneaz vntul, deplasarea curbilinie a automobilului va fi n sens invers
celui indicat de for.
Dac la automobilul cu virare insuficient (fig. 10.3b), fora de inerie
centrifug
c
F micoreaz efectul forei vntului
v
F , la automobilul cu virare n
exces (fig. 10.3c), fora centrifug
c
F mrete deformaiile laterale, putnd duce la
pierderea stabilitii. Deci automobilul subvirant va reveni automat la direcia
iniial iar la automobilul supravirant, care nu este stabil, pentru revenirea la mersul
rectiliniu, conductorul trebuie s bracheze scurt i rapid roile n sensul de virare
(mutnd metacentrul
v
C n faa lui
C ) i apoi s le readuc lent la poziia de mers
rectiliniu.
Revenind la automobilul cu virare insuficient, nu trebuie ns supraevaluate
proprietile de da stabilitate, din cauza momentului format de forele
v
F i
c
F ,
atunci cnd centrul de greutate
g
C se gsete n spatele metacentrului
v
C . Din
aceast cauz, la aceste automobile, pentru revenirea la poziia iniial,
conductorul auto trebuie s bracheze lent roile directoare n sensul de revenire.
10.2. Virarea automobilelor echipate cu roi rigide i pivoi verticali.
Virajul unui automobil este considerat corect atunci cnd roile de direcie
ruleaz fr alunecri i patinri. Pentru aceasta este necesar ca roile automobilului
s ruleze pe traiectorii concentrice n jurul aceluiai centru de virare. n cazul
roilor directoare la puntea din fa (fig. 10.4.), centrul de virare O trebuie situat pe
prelungirea axei punii din spate.
Se folosesc notaiile:
e
,
i
unghiurile de virare (bracare) ale roilor
directoare din exteriorul, respectiv interiorul traiectoriei;
e
R ,
i
R razele
exterioar, respectiv interioar de virare;
0 0
B A b = distana dintre pivoii roilor
directoare; B ecartamentul automobilului; unghiul mediu de bracare;
a
v
viteza de deplasare a automobilului;
2 , 1
v vitezele punctelor centrale ale punilor.
Se mai definesc m-rimile: urma virajului limea fiei de drum necesar vir-
rii; cerc de virare cercul de raz
max e
R descris, la virarea cu raza minim, de roata
automobilului; cerc de gabarit cercul maxim descris, la virarea cu raza mi-nim,
de punctul cel mai din afara auto-mobilului.
Sunt cunoscute relaiile:
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
188
L
b R
e
2
ctg
+
= ;
L
b R
i
2
ctg
= ;
2
ctg
b
L R
e
= ; (10.3)
2 sin
b B L
R
e
e
+ =
;
2 tg
b B L
R
i
i
. (10.4)
innd seama de relaiile (10.3), condiia virrii geometrice, cunoscut i sub
denumirea de condiia Ackermann, este dat de ecuaia:
Fig.10.4.
L
b
i e
= ctg ctg (10.5)
La unele automobile cu capacitate de trecere mrit, pentru micorarea razei
de virare, a urmei virajului i pentru micorarea rezistenei la rulare prin rularea
roilor din spate pe urmele celor din fa, se folosesc roi directoare la ambele puni
(fig. 10.5.). n acest caz, relaiile artate mai nainte devin:
u
rm
a
v
ira
ju
lu
i
c
e
r
c
d
e
v
i
r
a
j
c
e
r
c
d
e
g
a
b
a
r
i
t
y
R
B
R
O
v
1
x
E
0
b
A
0
B
0
e
i
R
e
L
v
2
Maniabilitatea autovehiculelor
189
2
2
ctg
2
2
ctg
L
b R
L
b R
i
e
=
+
=
; (10.6)
2 tg 2
b L
R
e
; (10.7)
2 sin 2
b B L
R
e
e
;
2 tg 2
b B L
R
i
i
; (10.8)
L
b
i e
2
ctg ctg = . (10.9)
Fig.10.5.
v
2
i
v
1
R
c
e
r
c
d
e
g
a
a
b
r
i
t
c
e
r
c
d
e
v
i
r
a
j
O
R
e
R
y
L
b
i
e
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
190
10.3. Virarea automobilelor echipate cu roi elastice i pivoi nclinai.
Urmare deformrii laterale a pneurilor i poziiei nclinate a pivoilor se
impune corectarea condiiei de virare a lui Ackermann, care are un caracter mai
mult geometric.
n acelai timp, dac se ine seama i de efectul forei centrifuge care apare la
deplasarea automobilului pe o traiectorie curbilinie, ncrcarea roilor nu mai este
egal, roile din exterior sunt mai ncrcate dect cele din interior. Dup cum s-a
mai artat, la capitolele anterioare, transferul de greutate ntre roile aceleiai puni,
ca i ntre cele dou puni, produce deformaii transversale inegale la cele patru
roi. Deformaiile fiind n acelai timp funcii neliniare de sarcina
R
G i fora
transversal
y
F , regimurile de deplasare pe traiectoria curbilinie fiind extrem de
variate, dependenele ntre multitudinea factorilor externi i interni automobilului
fiind complexe, corecia condiiei Ackermann cere anumite simplificri.
Unghiurile de deviere lateral ale celor patru pneuri
e 1
,
i 1
,
e 2
,
i 2
modific poziia centrului de virare O ; intersecia normalelor la traiectoria roilor
delimitnd o zon H (fig. 10.6.), n care se gsete centrul de virare (dinamic)
O , raza de virare (dinamic) fiind
R .
Fig.10.6.
v
2
v
1
i
y
H
O
2e
2i
1e
1i
2e
2
2i
1e
( )
1
1i
R
L
x
Maniabilitatea autovehiculelor
191
Cu privire la condiia virrii corecte a automobilului s-au fcut o serie de
recomandri i propuneri, dintre care cele mai importante sunt:
- recomandarea Eberan, ca unghiurile de bracare a celor dou roi directoare s
fie egale
i e
= , care consider c stabilitatea mrit n viraj, prin pstrarea bazei
de sprijin este esenial;
- recomandarea Gough Shearer, ca unghiurile de deviere lateral ale roilor
din spate s fie neglijate 0
2 2
= =
i e
, iar ale roilor din fa s fie considerate
egale
i e 1 1
= , pe considerentul c distribuirea echilibrat a solicitrii celor dou
roi directoare micoreaz uzura pneurilor;
- recomandarea Fiala, ca raportul dintre forele laterale i sarcinile pe roile
directoare s fie egale
i
i
e
e
R
y
R
y
G
F
G
F
1
1
1
1
= . Fiala consider c limita de aderen trebuie
atins n acelai timp la ambele roi din fa, realizndu-se o mai bun stabilitate n
curb;
- recomandarea Hasselgruber, ca puterea forelor laterale la roile de direcie s
fie egal,
i e
P P
1 1
= , care consider ca eseniale puterile de frecare consumate
datorit deraprii, propunnd ca acestea s fie egale la cele dou roi;
- recomandarea Forkel, ca = = = =
e i e i 1 1 2 2
, rezultnd:
L b L
b
L b
L b
i e
2 ctg
ctg
ctg
2 ctg
2 ctg
ctg
+
=
+
; (10.10)
- relaia Henker, n care se ncearc o generalizare,
2
3 2 1 e e i
c c c + + = ; ( ) 7 , 0 5 , 0
1
K = c ; 1 8 , 0
2
K = c ; 01 , 0
3
= c (10.11)
n figura 10.7. sunt reprezentate grafic dependenele dintre unghiurile de
bracare ale roilor interioare i exterioare
conform recomandrilor menionate mai sus.
n figur se observ c Gough (diagrama G)
propune ca unghiul
i
s fie mai apropiat de
e
dect Ackermann (diagrama A);
Hasselgruber propune accentuarea bracrii
roii interioare (diagrama H); Fiala
(diagrama F) consider c
e i
< pe cnd
Eberan (diagrama E) consider c
mecanismul de direcie trebuie s fie un
paralelogram.
Trebuie avut n vedere c pentru
automobilele care se deplaseaz cu viteze
mici, la care nu apar fore laterale
unghiurile de deviere laterale sunt zero
condiia Ackermann rmne singura
A
G
H F
E
e
i
30
25
20
15
10
5
0 5 10 15 20
Fig.10.7.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
192
valabil, pe cnd la automobilele de vitez mare, la care stabilitatea n curbe este
hotrtoare, sunt preferate recomandrile Gough Eberan.
Considernd cazul avantajos acela la care centrul de virare este apropiat de
linia axei punii din spate i observnd c centrul de virare
O (fig. 10.6.) are
tendina de a se deplasa spre nainte, se apreciaz c mai aproape de realitate este
propunerea Gough (G), dei exist constructori de automobile care prefer
recomandarea Eberan.
Dispersarea propunerilor, cauzate de imposibilitatea ca mecanismul de direcie
al automobilului s fie ideal pentru orice tip de drum, ncrcare, vitez, pneuri duce
la concluzia c sunt necesare anumite compromisuri. Astfel studiile fcute de un
colectiv de la Universitatea din Braov Catedra de Mecanisme, ajung la concluzia
c este bine s fie luat ca baz condiia Ackermann, corectat printr-un coeficient
de deriv 25 , 1 2 , 1 K = k , conform relaiei:
L k
b
i e
= ctg ctg (10.12)
n stabilirea coreciei prin coeficientul k s-a avut n vedere faptul c esena
fenomenului virrii automobilelorechipate cu pneuri elastice este dat de
deplasarea spre nainte a centrului de virare
O . Din acest punct de vedere, chiar se
recomand, ca centrul de virare static ) 0 ( =
s
O s fie situat n spatele axei punii
nedirectoare, pentru ca odat cu apariia devierii laterale a roilor 0 , centrul de
virare dinamic
O s se deplaseze spre nainte, ocupnd poziii ct mai apropiate
de axa punii din spate (fig. 10.8.). Aceasta face ca roile nedirectoare s aib
devieri laterale minime 0
2
, valorile coeficientului k fiind apreciate pentru
unghiuri de deviere laterale ale roilor din fa cuprinse ntre
o o
K3 1 .
O analiz real nu poate ns neglija efectele devierii roilor din spate, cci
efectele virrii punii din fa sunt conexe cu cele ale punii din spate. Prin urmare,
este mai puin important gsirea unor lanuri cinematice complexe care s
reproduc cu exactitate o anumit condiie de virare. Prin sporul de sarcin pe roile
exterioare, unghiurile de deviere lateral ale acestora cresc, ceea ce micoreaz din
efectul unghiului de virare. n acest caz este necesar ca de la nceput unghiul
e
s
fie mrit fa de condiia Ackermann.
Pe de alt parte, nclinrii pivotului cu unghiul
0
, punctul de contact al
pneului cu calea de rulare, n timpul virrii roii de direcie, nu se mai rotete n
jurul articulaiilor
0 0
B A ci
0 0
B A (fig. 10.9). Distana dintre pivoi, la nivelul
solului, va deveni:
0 0 0 0 0 0
tg 2 tg 2 + + = = r b H B A B A b , (10.13)
n care r este raza roii. Modificarea ampatamentului datorit unghiului de
nclinare n direcia longitudinal a pivotului
0
se neglijeaz, i condiia de virare
Maniabilitatea autovehiculelor
193
corect, innd seama att de devierea lateral a pneurilor ct i de nclinarea
pivoilor, devine:
L k
r b
i e
+
=
0
tg 2
ctg ctg
(10.14)
Aceast condiie reprezint i corelaia care trebuia asigurat ntre unghiurile
de rotire ale levierelor din mecanismul de direcie al automobilului.
Fig.10.8.
Fig.10.9.
4
0
5
0
6
0
5
2
4
0
'
6
7
5
0
'
8
1
4
5
'
b
A
0
e
i
B
0
B
E
A
y
x
i
1i
=1
=2
1i
( )
1i
( )
1i i
( )
e 1e
L
L
'
=
k
L
b/L=0,54
k=1,25
e
i
v
x
O
O
O
s
A-Ackerman
E-Eberan
B- U. Bv
K K
r
P
0
A
A
0
' ' B
0
b'
B-ecartament
0
0
0
B
0
H
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
194
10.4. Capacitatea de virare a automobilelor.
Aprecierea cantitativ a caracteristicilor de virare este destul de dificil
datorit modelului static nedeterminat al automobilului. Unghiurile de deviere
laterale ale celor patru roi
e 1
,
i 1
,
e 2
i
i 2
, fiecare funcie de mai muli factori,
fac ca localizarea zonei de virare, n care se gsete centrul de virare dinamic s fie
extrem de dificil. Cu toate acestea, pe baz de cercetri experimentale, n
literatura de specialitate se fac o serie de precizri cu privire la caracteristicile de
virare.
Pe lng cazurile clasice de virare insuficient sau virare n exces, se folosete
aa zisa comand proprie (subcomand, supracomand), care caracterizeaz
schimbarea vitezei de rotaie a automobilului n jurul axei verticale, n funcie de
acceleraia normal a automobilului, pentru deplasarea pe o traiectorie cicular.
Parametrul principal de apreciere a capacitii automobilului de a suferi
modificri ale traiectoriei devine raportul dintre viteza unghiular a axei
longitudinale a automobilului i unghiul de bracare al roilor de direcie, punndu-
se astfel n eviden ntrzierea sau avansul reaciei automobilului fa de bracarea
roilor.
Pentru deplasarea pe un cerc de raz
c
R (fig. 10.10), automobilul cu capacitate
de virare normal corespunde cazului roilor rigide (fig. 10.10a). odat cu creterea
acceleraiei normale, datorit forei centrifuge, cresc n aceeai msur i unghiurile
de deviere lateral
1
i
2
.
Fig.10.10
1
v
=0
2
v
c
g
c
g
c
g
2
v
2
v
1
v
1
v
( )
2
1 I
( )
II 1
2
II
I
I >0
<
1 2
2 1
<
<0 II
O
O
O
I
II
Rc
a
b
c
v
a
Maniabilitatea autovehiculelor
195
La automobilele cu caracteristic de virare insuficient, puntea din fa va avea
micarea de deviere spre exteriorul curbei, automobilul nu se nscrie n viraj i
tinde s-i menin traiectoria rectilinie (fig. 10.10b). Viteza de rotaie n jurul axei
verticale scade odat cu creterea acceleraiei nirmale, iar pentru meninerea razei
de virare
c
R , trebuie bracate cu unghiul >
I
.
La automobilele cu caracteristic de virare n exces, puntea din spate
derapeaz spre exteriorul curbei, automobilul tinde s prseasc traiectoria impus
spre exteriorul curbei (fig. 10.10c). Viteza de rotaie crete cu acceleraia normal a
automobilului iar pentru meninerea razei de virare
c
R , trebuie ca unghiul de
bracare <
II
.
Sensibilitatea automobilului la bracarea roilor scade pentru automobilele
subvirate, subvirarea critic caracteriznd refuzul definitiv de a se nscrie n viraj i
crete la automobilele supravirate supravirarea critic aprnd la descreterea
continu a razei de virare dup o spiral. Se poate afirma c automobilele ce
vireaz n exces au o vitez critic a crei depire duce la o insta-bilitate de
direcie, pe cnd automobilele subvirate au o vitez caracte-ristic dar nu este
critic.
Fig.10.11.
2
v
0
A
1
1
v
c
c
g
E
0
v2
c
v1
c
v
a
F
v
F
v
F
12
F
0
F
11
v
F
9
0
2
O
>
2 1
=
2 1
O
I
1
<
2
II
O
=
1 2
<
2 1
1 2
>
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
196
Dac la un automobil aflat n deplasare rectili-nie apare o for transversal
(fig. 10.11.) care poate fi fora vntului
v
F , n cazul virrii neutre, automobi-lul se
deplaseaz tot rectiliniu, dar nclinat fa de direcia iniial cu unghiul de deviere
lateral ; n cazul subvirrii, deplasarea devine curbilinie, curba fiind de acelai
sens cu fora (unghiul dintre vitez i fora transversal va fi mai mic de
o
90 ),
centrul de curbur devenind
I
O
; n cazul supravirrii, deplasarea curbilinie se face
pe o traiectorie cu curbur invers forei (unghiul dintre vitez i fora transversal
va fi mai mare dect
o
90 ), centrul de curbur devenind
II
O
.
Viteza critic se determin plecnd de la raza de virare dinamic
R (10.2).
Din relaia acceleraiei normale
c
a
a n
R
v
R a
2
2
= = ,
n care
a
v este viteza automobilului;
a
viteza unghiular de parcurgere a
traiectoriei de ctre automobil, se determin raza traiectoriei circulare:
n
a
c
a
v
R
2
= (10.15)
Dup egalarea razelor date de relaiile (10.15) i (10.2) rezult:
( )
1 2
2
+
=
L
a
v
n
a
(10.16)
Pentru traiectoria circular de raz
c
R , n cazul virrii n exces, viteza critic
reprezint acea vitez la care unghiul de bracare necesar parcurgerii traiectoriei
este nul, 0 = , deci:
1 2
=
L a
v
n
cr
(10.17)
Admind c variaia devierii laterale este liniar cu fora, folosind coeficienii
de deviere lateral
1
k i
2
k
1 1
1
= k F
y
;
2 2
2
= k F
y
(10.18)
din echilibrul automobilului, respectiv din ecuaia de momente n jurul centrului de
greutate, rezult:
b
a
F
F
c
y
+
=
1
1
;
a
b
F
F
c
y
+
=
1
2
(10.19)
n care
c
F este for transversal centrifug, a i b coordonatele centrului de
greutate fa de axa punii din fa, respectiv din spate. Astfel unghiurile de deviere
lateral:
Maniabilitatea autovehiculelor
197
( ) b a k
F a
k
F
c
y
+
= =
1
2
1
1
1
;
( ) b a k
F a
k
F
c
y
+
= =
2
1
2
2
2
(10.20)
Acceleraia normal fiind:
a
c
n
m
F
a = , (10.21)
n care
a
m este masa automobilului, rezult viteza critic:
( )
2 1
2 1
2
1 2
k b k a
k k
m
L
k
b
k
a
m
b a L
v
a
a
cr
=
+
= (10.22)
Trebuie fcut precizarea c relaia (10.22) s-a determinat n ipoteza
neacionrii volanului i c rmne posibil deplasarea cu viteze superioare celei
critice i c variaia liniar din relaiile (10.18) este valabil numai pentru unghiuri
de deviere lateral de valori mici. n literatura de specialitate se recomand ca
virarea insuficient i virarea n exces s fie definite n funcie de raportul vitezei
de alunecare lateral i unghiul de bracare.
ncercrile automobilelor, n ceea ce privete maniabilitatea se pot face pe
traiectorie rectilinie i curbilinie, cu raza constant sau variabil, cu vitez
constant sau variabil, condus de un conductor sau automat. Astfel c i
metodele de apreciere a maniabilitii sunt diferite. Acestea se fac att n funcie de
condiiile de circulaie ct i n funcie de comanda automobilului. Metodele de
apreciere n funcie de condiiile de circulaie au n vedere micrile rectilinii,
curbilinii (stabilizate sau nestabilizate) i trecerea de la micarea rectilinie la cea
curbilinie.
Micarea curbilinie nestabilizat fiind des ntlnit n circulaia
automobilelor aprecierea maniabilitii se poate face i pe traseu n serpentin
(ntre jaloane). Pentru msurarea unghiului de deriv se folosete teodolitul,
aparatul de fotografiat sau filmat montate cu axa optic perpendicular pe calea de
rulare cu marginea cadrului paralel cu axa longitudinal a automobilului.
Aparatele montate pe automobil trebuie s nregistreze unghiul de bracare al roilor
de direcie, acceleraiile normale la cele dou puni, nclinarea caroseriei, abaterea
axei longitudinale a automobilului i viteza de deplasare.
Msurarea unghiului de deviere lateral al roilor se poate face cu un giroscop
pentru msurarea nclinrii caroseriei n curb aparat de msur a bracrii i
instrumente de nregistrare. Astfel pentru deplasarea pe o traiectorie circular de
raz
c
R , la viteze reduse, bracarea nregistrat corespunde valorilor geometrice ale
lui Ackermann, unghiul de deviere lateral fiind zero. Reparcurgnd traiectoria cu
vitez mrit, se msoar i se calculeaz acceleraia normal (centripet) i
unghiurile de bracare necesare parcurgerii traiectoriei. Fora de inerie centrifug se
redistribuie ca for transversal pe cele patru roi, iar diferena dintre unghiurile de
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
198
bracare necesare parcurgerii traiectoriei circulare, n cazul static (vitez redus) i
dinamic (vitez oarecare constant), indic unghiul de deriv.
10.5. Determinarea reaciunilor laterale totale care apar n timpul
virajului automobilului
Reaciunea lateral total este suma reaciunilor laterale care acioneaz la
ambele roi ale fiecrei puni a automobilului. Se noteaz cu
1
Y reaciunea lateral
total pentru puntea din fa i cu
2
Y reaciunea lateral total pentru puntea din
spate (fig. 10.12.).
Fig.10.12.
Prin nsumare se obine:
e i
e i
Y Y Y
Y Y Y
2 2 2
1 1 1
+ =
+ =
(10.23)
n micarea rectilinie a automobilului pe un drum orizontal, n absena vntului
lateral i la o distribuire egal a forei de traciune pe roile motoare, reaciunile
laterale
1
Y i
2
Y sunt nule.
L
2e
v
2
2
2i
O
1
( )
e
1e
1
v
1i
y
X
2i 2e
X
2e
Y
Y
2i
A
b
a
cy
F
F
j
M
j
O
R
Y
1e
Y
1i
f Z
R1i
f Z
R1e
B
R
a
c
Maniabilitatea autovehiculelor
199
n cazul de fa se determin reaciunile laterale totale
1
Y i
2
Y care apar la
virajul automobilului, n cazul cel mai general, cnd roile sunt elastice iar fora de
traciune nu este distribuit egal la roile motoare.
Pentru determinarea reaciunilor
1
Y i
2
Y , n figura 10.12. s-au reprezentat
toate forele i momentele care acioneaz n plan orizontal aupra automobilului
n timpul virajului. Reaciunile
1
Y i
2
Y acioneaz perpendicular pe planul roilor
din fa i respectiv din spate.
Dac se ine seama de frecarea din diferenial, atunci n viraj reaciunile
tangeniale ale roilor motoare (puntea motoare se consider cea din spate)
i
X
2
i
e
X
2
nu sunt egale, din care cauz apare un moment
z
M care tinde s roteasc
automobilul n plan orizontal:
2 2
2 2
B
X
B
X M
e i z
= (10.24)
Dar
i i
R R i
Z f F X
2
2
= i
e e
R R e
Z f F X
2
2
= ,
n care
i
R
F i
e
R
F sunt forele la roile motare, f coeficientul rezistenei la
rulare,
i
R
Z
2
i
e
R
Z
2
reaciunile normale la roile motoare. n acest caz ecuaia
(10.24) devine:
( ) ( )
2 2
2 21
B
Z f F
B
Z f F M
e e i
R R R R z
= (10.25)
Dac se ine seama de raportul
e
i de distribuire a forelor motoare:
R e R
F i F
i
= ; ( )
R e R
F i F
e
= 1 (10.26)
Prin nlocuirea forelor din relaiile (10.26) n relaia (10.25) se obine:
( ) ( ) [ ]
2
1 2
2 2
B
Z Z f F i M
i e
R R R e z
+ = (10.27)
La determinarea relaiei (10.27), s-a considerat c reaciunea tangenial
i
X
2
,
care acioneaz asupra roii interioare este mai mare dect reaciunea tangenial
e
X
2
care acioneaz la roata exterioar. Acest lucru este ntotdeauna real cu
condiia ca roata din interior s nu patineze.
Dac se nlocuiete aciunea forei de traciune cu momentul
z
M , atunci
trebuie s se in seama de rezistena la rulare a roilor din spate ( )
i e
R R
Z Z f
2 2
i
de rezistena aerului
a
R .
Pentru unghiuri de bracare mici se poate aproxima c forele
a
R ,
i
X
1
i
e
X
1
acioneaz paralel cu axa longitudinal a automobilului AB.
Dac se noteaz suma forelor menionate cu
i
R (fig. 10.13), n cazul micrii
variabile se obine:
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
200
( )
t r
I G f R
t r
I Z Z Z Z f R R
R
d
R a a
R
d
R R R R R a i
e i e i
d
d 1
2
d
d 1
2
1
1 2 2 1 1
+ + =
= + + + + + =
Forele de inerie
cy
F i
j
F sunt egale cu produsul dintre masa automobilului
m i acceleraia centrului de greutate normal
cn
a i tangenial
ct
a . Pentru
determinarea acestor acceleraii considerm micarea automobilului n raport cu un
sistem rectangular de axe x i y (fig. 10.14).
Fig.10.13.
Fig.10.14.
F
t
M
z
Y
2
A B
M
j
F
j
F
cy
R
i
Y
1
b a
L
c
B
a b
L
B
A
v
B
v
Bn
v
v
C
v
Cn
v
A
v
v
An
v
2
( )
1
v
g
O
2
D
x
y
O
Maniabilitatea autovehiculelor
201
Corespunztor figurii 10.14. se poate scrie:
t d
d
= ;
2
2
d
d
d
d
t
a
t
= =
n care este viteza unghiulara a automobilului n viraj; unghiul dintre axa
AB i axa x ;
t d
d
acceleraia unghiular a automobilului. Se nelege c axa
ABnu este paralel cu axa de coordonat Ox aa cum se vede n figura 10.14.
Determinm proieciile
x
v i
y
v ale vitezei
c
v a centrului de greutate al
automobilului pe axele x i y .
Considerm sensul pozitiv al acestor viteze n sensul axelor i dup
descompunerea vitezei
c
v n vitezele
cn
v i v se obine:
sin cos
sin cos
=
+ =
v v v
v v v
cn y
cn x
(10.28)
Dup diferenierea acestor egaliti n raport cu timpul, se obin expresiile
acceleraiilor centrului de greutate dup axele x i y :
cos sin
d
d
sin cos
d
d
d
d
cos sin
d
d
sin cos
d
d
d
d
= =
+ + = =
v
t
v
v
t
v
t
v
a
v
t
v
v
t
v
t
v
a
cn
cn
y
cy
cn
cn x
cx
(10.29)
n acelai timp acceleraiile
cx
a i
cy
a ale centrului de greutate al
automobilului, avnd acelai sens cu ale sistemului de axe, se pot determina direct
ca proiecii ale acceleraiilor
ct
a i
cn
a .
Dac viteza
c
v se micoreaz, atunci:
sin cos
sin cos
=
=
ct cn cy
cn ct cx
a a a
a a a
(10.30)
Dup rezolvarea egalitilor (10.29) i (10.30) se obin expresiile finale pentru
acceleraiile centrului de greutate al automobilului:
t
v
v a
cn
cn
d
d
= (10.31)
cn ct
v
t
v
a + =
d
d
(10.32)
Cunoscnd acceleraiile se pot calcula forele de inerie
cy
F i
j
F care
acioneaz n centrul de greutate al automobilului, pentru ca acesta s fie n
echilibru:
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
202
=
t
v
v m F
cn
cy
d
d
(10.33)
+ =
cn j
v
t
v
m F
d
d
(10.34)
Din condiia de echilibru a sistemului n raport cu o ax vertical ce trece prin
punctul B , rezult:
z j cy
M M a F L Y =
2
(10.35)
Din condiia de echilibru a sistemului n raport cu o ax vertical ce trece prin
punctul A, rezult:
z j cy
M M b F L Y + + = cos
1
(10.36)
Momentul forelor de inerie
j
M se calculeaz cu relaia:
t
m
t
I M
R j
d
d
d
d
2
= = , (10.37)
n care m este masa automobilului;
R
I momentul de inerie masic n raport cu o
ax vertical ce trece prin centrul de greutate; raza de giraie;
t d
d
acceleraia unghiular a micrii automobilului n viraj. Sensul momentului de
inerie
j
M s-a luat corespunztor accelerrii micrii automobilului ( 0
d
d
>
t
).
Prin nlocuirea forei
cy
F i a momentului
j
M cu expresiile gsite anterior, se
obin expresiile reaciunilor laterale totale
1
Y i
2
Y n cazul cel mai general de
micare a automobilului:
L
M
L
t
a
t
v
v
m Y
z
cn
=
d
d
d
d
2
2
(10.38)
L
M
L
t
b
t
v
v
m Y
z
cn
+
+
=
d
d
d
d
cos
2
1
(10.39)
Acceleraia
t
v
cn
d
d
poate fi determinat n funcie de caracterul micrii
automobilului i de elasticitatea lateral a pneurilor.
Dup cum s-a artat pe baza cercetrilor experimentale unghiurile de
deviere lateral
i
ale roilor pot fi considerate proporionale cu reaciunea lateral
i
Y . Acest lucru este valabil i pentru puni, dac raza de viraj R este suficient de
mare i dac niciuna din roile acestei puni nu alunec lateral. Deci, unghiurile
1
Maniabilitatea autovehiculelor
203
i
2
de deviere lateral a punii din fa i din spate a automobilului pot fi
exprimate n funcie de reaciunile laterale totale
1
Y i
2
Y .
=
=
2 2 2
1 1 1
Y k
Y k
y
y
(10.40)
n care
1 y
k i
2 y
k sunt coeficienii de deviere lateral a punii fa i spate, egali cu
unghiul de deviere lateral cnd asupra punii acioneaz o reaciune lateral de 1
daN. Unghiurile de deviere lateral,
1
i
2
pot fi determinate i cu ajutorul
schemei din figura 10.14, respectiv:
AO
AD
v
v
A
An
=
cn g
A
An
v b D C b AD AD
AO
v
v + = + = = = (10.41)
BO
BD
v
v
B
Bn
=
cn
B
Bn
v a CD a BD BD
BO
v
v = = = = (10.42)
n conformitate tot cu figura 10.14. vitezele normale ale punctelor A i B pot
fi determinate i cu relaiile:
2
tg = v v
An
; ( )
1
tg = v v
Bn
de unde:
v
v b
cn
+
=
2
tg (10.43)
( )
v
v a
cn
=
1
tg (10.44)
Pentru valori mici ale unghiurilor de deviere lateral
1
i
2
i de bracare
se poate aproxima:
2 2
tg i ( )
1 1
tg
i din relaiile (10.43) i (10.44) rezult:
v
b v
cn
+
=
2
;
v
v a v
cn
+
=
1
(10.45)
Avnd n vederea relaiile (10.45) i (10.40) se obine:
v k
v a v
Y
y
cn
+
=
1
1
;
v k
b v
Y
y
cn
+
=
2
2
(10.46)
Totodat din condiiile de echiulibru ale forelor care acioneaz lateral i
considernd 1 cos = se obine:
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
204
= = +
t
v
v m F Y Y
cn
cy
d
d
2 1
(10.47)
nlocuind n relaia (10.47) expresiile obinute pentru reaciunile
1
Y i
2
Y din
relaiile (10.46), determinm acceleraia normal a centrului de greutate al
automobilului
t
v
cn
d
d
:
m k
v
v m k k
k k
v m k k
k b k a
v
t
v
y
cn
y y
y y
y y
y y
cn
+
+ =
1 2 1
2 1
2 1
1 2
d
d
(10.48)
Aa dar, relaiile (10.38) i (10.39) mpreun cu expresia (10.48) se folosesc
pentru determinarea reaciunilor laterale totale
1
Y i
2
Y pentru automobilul echipat
cu roi elastice n cazul cel mai general de micare; mai exact se refer la
automobilele ale cror pneuri posed elasticitate lateral.
Dac ns, se consider c roile automobilului sunt elastice doar n direcie
radial i longitudinal, iar n direcie lateral sunt rigide, atunci centrul instantaneu
de viraj va fi dispus n prelungirea axei punii din spate, cum s-a artat n figura
10.12, unde punctul O reprezint centrul instantaneu de viraj a automobilului cu
roi rigide n direcie lateral.
n acest caz, relaia (10.48) care indic dependena dintre acceleraia normal a
centrului de greutate al automobilului
t
v
cn
d
d
i viteza unghiular se simplific
mult.
Mrimea vitezei normale
n
v este egal cu produsul dintre viteza unghiular de
rotire a automobilului i distana de la punctul considerat la punctul D. De
exemplu viteza
cn
v a punctului
g
C centrul de greutate al automobilului este
egal cu produsul CD . n timpul micrii automobilului, la roile care posed
elasticitate lateral, ambii factori ( i CD) sunt variabili, ceea ce determin
dependena complex a acceleraiei
t
v
cn
d
d
de factorii care o influeneaz.
La roile rigide n direcie lateral, centrul instantaneu de viraj, ntotdeauna se
gsete pe prelungirea axei punii din spate, i, de aceea punctul D (obinut de
perpendiculara ridicat din centrul instantaneu de viraj pe axa AB (fig. 10.14.) a
automobilului) are o poziie fix (punctul A). n acest caz segmentul b CD = ,
viteza = b v
cn
, iar acceleraia
t
b
t
v
cn
d
d
d
d
= .
Folosind aceste expredii pentru viteza
cn
v i acceleraia
t
v
cn
d
d
, obinem
relaiile pentru acceleraiile centrului de greutate (relaiile (10.31) i (10.32)):
Maniabilitatea autovehiculelor
205
t
b v a
cn
d
d
+ = (10.49)
2
d
d
= b
t
v
a
ct
(10.50)
forele de inerie, centrifugal
cy
F i longitudinal
j
F se determin n acest
caz cu expresiile:
+ =
t
b v m F
cy
d
d
(10.51)
=
2
d
d
b
t
v
m F
j
(10.52)
n funcie de acestea se schimb i relaiile (10.38) i (10.39) pentru reaciunile
laterale totale:
( )
L
M
L
t
b a a v
m Y
z
+
=
d
d
2
2
(10.53)
( )
L
M
L
t
b b v
m Y
z
+
+ +
=
d
d
cos
2 2
1
(10.54)
n cazul deplasrii automobilului cu vitez constant, raza de viraj R
constant i unghiul de bracare constant, atunci acceleraiile
t
v
cn
d
d
i
t d
d
devin
nule. n acest caz la automobilele cu roi rigide (lateral) sau cu roi elastice,
reaciunile laterale totale se determin cu relaiile:
L
M
R
v
L
a
m
L
M
v
L
a
m Y
z z
= =
2
2
(10.55)
L
M
R
v
L
b
m
L
M
v
L
b
m Y
z z
+ = + =
2
1
cos (10.56)
n aceste expresii momentul
z
M se determin cu relaia (10.27) pentru roile
elastice sau cu relaia:
2
) 1 2 (
B
F i M
R e z
= (10.57)
pentru roile rigide.
Dac se neglijeaz rezistena la rulare de la puntea din spate, adic:
X F F
t R
= =
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
206
fora de traciune care intr n relaiile (10.27) i (10.57) se determin cu ajutorul
forei tangeniale specifice
R
Z
X
= sau pentru ntregul automobil
ad
G
X
= , care la
limita impus de aderen devine
ad
G
X
max
= .
Cu aceste precizri relaiile (10.27) i (10.57) capt urmtoarele forme:
- pentru roi elastice ( ) ( ) [ ]
2
1 2
2 2
2
B
Z Z f g m i M
i e
R R e z
+ = (10.58)
- pentru roi rigide
2
) 1 2 (
2
B
g m i M
e z
= (10.59)
n care
2
m este masa care revine punii motoare din spate i
ad
G greutatea
aderent a automobilului.
Folosind expresiile obinute pn acum pentru reaciunile laterale totale, se
determin n final, relaiile corespunztoare diferitelor situaii.
- n cazul general de micare a automobilului cu roi elastice n toate direciile
(vertical, longitudinal i lateral) conform relaiilor (10.38) i (10.39) se obin
ecuaiile:
( ) ( ) [ ]
L
B
Z Z f i g m
t a t
v
v
L
a
m Y
i e
R R e
cn
=
2
1 2
d
d
d
d
2 2
2
2
2
(10.60)
( ) ( ) [ ]
L
B
Z Z f i g m
t b t
v
v
L
b
m Y
i e
R R e
cn
+ +
+
+ =
2
1 2
d
d
d
d
cos
2 2
2
2
1
(10.61)
- n cazul de micare a automobilului cu roi elastice n direciile vertical i
longitudinal conform relaiilor (10.53) i (10.54) se obin ecuaiile:
( ) ( ) [ ]
L
B
Z Z f i g m
t a
b v
L
a
m Y
i e
R R e
+ =
2
1 2
d
d
2 2
2
2
2
(10.62)
( ) ( ) [ ]
L
B
Z Z f i g m
t b
b v
L
b
m Y
i e
R R e
+ +
+ + =
2
1 2
d
d
cos
2 2
2
2
1
(10.63)
- n cazul de micare a automobilului cu roi rigide:
Maniabilitatea autovehiculelor
207
( )
L
B
i g m
t a
b v
L
a
m Y
e
+ =
2
1 2
d
d
2
2
(10.64)
( )
L
B
i g m
t b
b v
L
b
m Y
e
+ + =
2
1 2
d
d
cos
2
1
(10.65)
- n cazul micrii uniforme a automobilului cu roi elastice conform relaiilor
(10.55) i (10.56) se obin relaiile:
( ) ( ) [ ]
L
B
Z Z f i g m v
L
a
m Y
i e
R R e
+ =
2
1 2
2 2
2 2
(10.66)
( ) ( ) [ ]
L
B
Z Z f i g m v
L
b
m Y
i e
R R e
+ + =
2
1 2 cos
2 2
2 1
(10.67)
- n cazul micrii uniforme a automobilului cu roi rigide:
( )
L
B
i g m v
L
a
m Y
e
=
2
1 2
2 2
(10.68)
( )
L
B
i g m v
L
b
m Y
e
+ =
2
1 2 cos
2 1
(10.69)
Pentru automobilele cu ambele puni motoare 4 4 , n locul lui
2
m se va
introduce masa total a automobilului m.
n cazul cnd transmisia la roile motoare are un diferenial cu roi conice, cu
frecare interioar redus fora de traciune total X F
t
= se distribuie egal la roile
motoare. n acest caz coeficientul i poate fi luat n calcul egal cu 0,5 i ca urmare
membru din partea dreapt a relaiilor (10.60) pn la (10.69) se reduc mult sau
pentru cazul micrii uniforme a automobilului se anuleaz.
Mrimea reaciunii laterale
2
Y care acioneaz la puntea din spate a
automobilului, are o mare influen asupra stabilitii acestuia, deoarece nceperea
alunecrii laterale a punii din spate reprezint un real pericol (supravirare).
Din analiza relaiilor obinute pentru reaciunea lateral
2
Y , care acioneaz la
puntea din spate a automobilului, n cazul general de micare, rezult c reaciunea
2
Y este influenat de urmtorii factori principali:
1) Viteza de deplasare a automobilului ( v ) i raza de virare R ; n relaiile
obinute influena acestori factori apare prin expresiile
R
v
L
a
m v
L
a
m
2
= care
determin fora de inerie ce acioneaz la puntea din spate n timpul micrii
automobilului cu vitez constant pe o curb de raz constant.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
208
2) Acceleraia unghiular a automobilului
t d
d
, care apare n expresia
t a
b
L
a
m
d
d
2
. Acceleraia unghiular
t d
d
se gsete n dependena liniar
de viteza de rotaie
t d
d
a roilor de direcie i are o influen pozitiv la rotirea
roilor de direcie nspre centrul de viraj (reducerea razei de virare R ) i negativ
la rotirea roilor de direcie n sens opus. Acestea se explic prin aceea c
automobilul are tendine de blocare n special n intrarea n curb(reducerea razei
de virare R ). La ieirea automobilului din curb i intrarea n micare rectilinie
stabilitatea lateral a acestuia se mbuntete sensibil. n conformitate cu relaia
menionat, acceleraia unghiular a automobilului
t d
d
provoac mrirea
reaciunii laterale
2
Y numai n cazul cnd diferena
a
b
2
este pozitiv
(
2
> ab ), ceea ce se ntmpl la construciile actuale de automobile. Cnd
2
= ab , acceleraia unghiular
t d
d
nu influeneaz reaciunile
2
Y i
1
Y .
3) Distribuirea n mod inegal a forei de traciune la roile motoare i mrimea
forei de traciune n relaiile obinute este determinat de expresia
( ) 1 2
2
e
i g m
L
B
. n transmisia la roile moroare este inclus diferenialul cel
mai rspndit i simplu, la care coeficientul i este foarte apropiat de 0,5 i de aceea
influena acestui factor asupra mrimii reaciunii laterale
2
Y este destul de redus.
4) Diferena dintre rezistena la rulare a roii motoare din interior fa de roata
motoare din exterior este influent prin intermediul expresiei ( )
i e
R R
Z Z f
L
B
2 2
2
.
Acest factor datorit valorii reduse a coeficientului de rezisten la rulare f , are
de asemenea o influen foarte mic asupra mrimii reaciunii laterale
2
Y .
10.6. Influena forei laterale asupra reaciunilor normale n timpul
virajului automobilului.
Pentru cunoaterea influenei forei laterale asupra reaciunilor normale n
timpul virajului automobilului n literatura de specialitate sunt prezentate
rezultatele unor cercetri experimentale fcute asupra unor autoturisme echipate cu
roi elastice. Influena rigiditii pneului asupra modificrii reaciunilor normale i
laterale a fost marcat prin varierea presiunii interioare a aerului din pneu
i
p . n
Maniabilitatea autovehiculelor
209
figura 10.15. sunt prezentate curbele care ilustreaz rezultatele experienelor
efectuate cu pneuri de dimensiuni apropiate 13 145 SR i 15 165 SR . Din
graficele prezentate n figur rezult c modificarea presiunii aerului n pneuri nu
are o influen prea mare asupra distribuirii reaciunilor normale la roile punii din
spate. Dreapta 4 din ambele grafice ne indic dependena analitic dintre fora
lateral
cy
F i reaciunea normal
e
R
Z
2
.
Fig.10.15.
Aceast dreapt a fost trasat n ipoteza c influena forei laterale
cy
F asupra
reaciunii normale
e
R
Z
2
, corespunde aciunii a dou componente ale sale invers
proporionale cu distanele a i b de la axele punilor la centrul de greutate i care
sunt aplicate la cele dou puni la nlimea centrului de greutate a automobilului.
Aceasta nseamn c la puntea din fa i din spate acioneaz corespunztor forele
1
Y i
2
Y , fiecare din ele n centrul de greutate la nlimea
g
h (fig. 10.16.).
Pentru a corespunde condiiilor experimentale, fora
2
Y este egal cu
reaciunea lateral total, care acioneaz la puntea din spate n absena acceleraiei
unghiulare
t d
d
(micare uniform ct = v , ct = R ) i n cazul absenei momentului
250
300
350
2
1
4
250
300
350
4
3
400
0 100 200 300 400
1. pneu 145SR13 pi=1,8daN/cm
2. pneu 145SR13 pi=2,2daN/cm
3. pneu 155SR15 pi=2 daN/cm
Z
R2e
[daN]
[daN]
Z
R2e
cy
F [daN]
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
210
z
M , condiionat de distribuia inegal a forei motoare
R
F la roile punii motoare.
n aceast situaie reaciunea lateral
2
Y se determin cu relaia (10.66), dac n
aceast relaie, se neglijeaz membru al doilea, care se refer la distribuirea
neuniform a forei la roile punii motoare.
Fig.10.16.
Folosind figura 10.16. putem determina reaciunile normale
e
R
Z
2
i
i
R
Z
2
:
B
h
Y
G m
B
h
Y Z Z
g g
R
i
= =
2
2 2
2 2
2
5 , 0
2
(10.70)
B
h
Y
G m
B
h
Y Z Z
g g
R
e
+
= + =
2
2 2
2 2
2
5 , 0
2
(10.71)
Reaciunea lateral total care apare n aceste relaii conform condiiilor
experienei este:
L
a
F Y
cy
=
2
Dup cum se observ n figura 10.15. dreapta 4 reaciunea
2
R
Z obinut pe
cale analitic are valori ceva mai mici dect cele reale. Aceast diferen se poate
explica prin neconcordana ipotezei admise despre influena forei
cy
F asupra
reaciunii
e
R
Z
2
, ca i prin influena schimbrii centrului de greutate al
automobilului i modificarea ecartamentului B , care au loc n timpul aciunii forei
laterale
cy
F asupra automobilului.
B/2 B/2
B
R2e
Z Z
R2i
y
z
2
2
Y
2
h
g
Maniabilitatea autovehiculelor
211
Pentru determinarea reaciunilor de la puntea din fa se procedeaz la fel,
astfel:
B
h
Y
G m
B
h
Y Z Z
g g
R
i
= =
1
1 1
1 1
2
5 , 0
1
(10.72)
B
h
Y
G m
B
h
Y Z Z
g g
R
e
+
= + =
1
1 1
1 1
2
5 , 0
1
(10.73)
Reaciunea lateral total de la puntea din fa este:
L
b
F Y
cy
=
1
n care
cy
F este fora centrifug care acioneaz pe direcia y cnd automobilul
se deplaseaz pe o traiectorie curbilinie n centrul de greutate al automobilului.
10.7. Influena momentului de inerie care apare la micarea
neuniform a automobilului la deplasarea acestuia pe o traiectorie
curbilinie asupra reaciunilor laterale.
n determinarea relaiilor (10.70), (10.71), (10.72) i (10.73) nu s-a inut seama
i de influena momentului de inerie
j
M care acioneaz asupra automobilului
cnd acesta se deplaseaz n curbe.
Dac raza de viraj R i viteza de
deplasare v a automobilului nu sunt
constante, atunci se modific viteza
unghiular a micrii de rotaie, ceea
ce influeneaz asupra reaciunilor
laterale totale i normale, care
acioneaz la roile interioare i
exterioare ale automobilului.
n figurile 10.12. i 10.13. s-a
indicat momentul de inerie
j
M ,
orientat n aa fel nct s se asigure
echilibru automobilului. Acest moment
se determin cu relaia (10.37). Dac
sensul de momentului
j
M este cel
prevzut n figurile 10.12. i 10.13,
acceleraia unghiular a automobilului
t d
d
are valoare pozitiv i conform
relaiilor (10.38) i (10.39) reaciunea
2
Y se micoreaz, iar reaciunea
1
Y se
Y
0
0
Y
M
z
dt
d
Fig.10.17.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
212
mrete cu aceeai valoare
0
Y care se determin cu expresia:
dt
d
L
M
L
M
Y
z
j
2
0
= = (10.74)
Se obine un cuplu de fore, care rotete automobilul n raport cu axa sa
vertical, aa cum s-a artat schematic n figura 10.17. n acest fel, are loc un
fenomen analog cu cazul distribuirii inegale a forei motoare la roi; respectiv,
datorit momentului
j
M se produce modificarea reaciunilor laterale totale cu
mrimea
0
Y care se determin cu relaia (10.74)
11
STABILITATEA AUTOMOBILULUI
LA ALUNECAREA LATERAL
11.1. Criterii pentru aprecierea stabilitii automobilului la alunecarea
lateral
Alunecarea lateral a automobilului este determinat de nceperea alunecrii
laterale a punii din spate. Alunecarea lateral a punii din fa, dac a aprut dintr-
o cauz oarecare, nu reprezint un pericol prea mare, deoarece se anuleaz repede
sub influena forei centrifuge automobilului n viraj. Pentru ilustrarea situaiei
expuse mai sus n fig. 11.1 s-au reprezentat dou scheme ale autovehiculului; n
figura 11.1.a cazul alunecrii laterale a punii din spate, iar n figura 11.1.b cazul
alunecrii punii din fa. n aceste figuri (v) este viteza de deplasare a
automobilului n direcia axei longitudinale AB iar (v
y
) este viteza de alunecare
lateral a punii. Considernd c roile automobilului sunt rigide, gsim centrul de
viraj al automobilului n punctul O. Fora centrifug (de inerie) F
cy
(componenta
forei centrifuge F
c
pe direcia y) contribuie la sporirea alunecrii laterale a punii
spate i la reducerea sau anularea alunecrii laterale a punii fa.
Fig.11.1.
y
v
v
F
cy
c
g
B A
O
A
y
v
v
O
g
c
F
cy
B
a b
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
214
Din acest motiv, atenia n ceea ce privete stabilitatea automobilului la
alunecarea lateral este ndreptat asupra studierii stabilitii micrii punii spate.
Pentru a caracteriza pierderea stabilitii micrii punii spate a automobilului s-au
stabilit drept criterii urmtoarele:
1) Pentru automobile cu roi rigide:
- nceperea patinrii roii interioare a punii;
- nceperea alunecrii laterale a punii cnd exist patinarea roii ei
interioare;
- nceperea alunecrii laterale a punii spate fr prealabila patinare a roii
ei interioare.
2) Pentru automobilul ale crei roi posed elasticitate latent:
- nceperea patinrii i alunecrii laterale a roii interioare a punii;
- nceperea alunecrii laterale a punii n cazul existenei patinrii i
alunecrii laterale a roii interioare.
Pentru aprecierea stabilitii punii din spate se stabilete ca parametru,
raportul dintre coeficienii
2
i
2
sau raportul dintre viteza de deplasare a
automobilului v i raza de viraj R, care corespund momentului nceperii micrii
instabile a automobilului dup unul din criteriile artate mai sus.
Coeficientul
2
de stabilitate lateral a punii din spate reprezint raportul
dintre reaciunea lateral total Y
2
, care acioneaz la aceast punte i greutatea G
2
a automobilului repartizat pe puntea spate (sau reaciunea normal Z
R2
)
coeficientul reprezint fora tangenial specific i este dup cum s-a mai
artat raportul dintre fora de traciune F
t
i greutatea automobilului G
a
.
Stabilitatea lateral a punii din spate depinde de construcia transmisiei la roi,
n special de construcia diferenialului. Se consider o oarecare aproximare, c
fora de traciune F
t
se distribuie egal la roile motoare (i = 0,5).
11.2. Stabilitatea automobilului cu roi rigide
11.2.1. Cazul nceperii patinrii a roii interioare
nceperea patinrii roii interioare a punii motoare se caracterizeaz prin aceea
c reaciunea rezultant (adic suma geometric a reaciunii laterale i tangeniale)
este egal cu fora de aderen, cnd =. Deoarece la roata interioar a punii
acioneaz ntotdeauna o reaciune normal mai mic, aceast roat ncepe s
patineze naintea roii exterioare.
Pe baza celor artate, se obine pentru roata interioar n momentul nceperii
patinrii ei:
i R i
Z R
2 2
=
Stabilitatea automobilului la alunecarea lateral
215
Deoarece roata care patineaz nu alunec lateral, deci nu transmite fore
laterale, fora lateral total Y
2
se transmite numai prin roata exterioar, iar
reaciunea rezultant R
2i
care acioneaz pe roata interioar este egal cu reaciunea
tangenial X
2i
(fig. 11.2).
innd seama de schema din figura 11.2 se obine
i
R a t i i
Z G F X R
2
5 , 0 5 , 0
2 2
= = = =
Nu s-a luat n considerare rezistena la rulare, ntruct s-a fcut precizarea c
avem de-a face cu roi rigide care
ruleaz pe o cale de rulare
nedeformabil.
Pentru a determina ecuaia care
caracterizeaz nceputul patinrii roii
interioare trebuie s cunoatem
reaciunile normale care acioneaz la
rotile automobilului n astfel de situaii.
Reaciunile normale pentru o
distribuire uniform a forei de
traciune la roile interioare i
exterioare (i = 0,5) se determin cu
relaiile (vezi relaiile 10.7010.73):
B
h
Y
a
h
G Z
B
h
Y
a
h
G Z
g g
R
g g
R
e
i
+
+ =
+ =
2 2
2 2
1 5 , 0
1 5 , 0
2
2
(11.1)
B
h
Y
b
h
Z
B
h
Y
b
h
G Z
g g
R
g g
R
ie
ii
+
=
1
1 1
1 5 , 0
1 5 , 0
(11.2)
n aceste condiii ecuaia care caracterizeaz nceputul patinrii roii interioare:
+ =
B
h
Y
a
h
G G
g g
a 2 2
1 5 , 0 5 , 0
din care se poate calcula coeficientul
i 2
de stabilitate lateral a punii din spate la
nceperea patinrii de ctre roata interioar
2
Z
R2e
y
2
Y
R2i
Z
2
m' g
B
G
2 h
2e
X 2e
R
Y
2
R
2i
Fig.11.2.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
216
=
a
h L
h
B g
g
i
1
2
2
(11.3)
Cu ajutorul relaiei (11.3) s-a trasat dreapta A
1
B
i
din figura (11.3), care
intersecteaz axa ordonatelor n punctul n care fora tangenial specific =0, iar
coeficientul
g
i
h
B
=
2
2
(11.4)
ce corespunde nceperii rsturnrii automobilului, deoarece conform relaiei (11.1)
pentru =0 i
g
i
h
B
2
2
= reaciunea normal 0
2
=
i
R
Z .
Egalnd cu zero coeficientul
i 2
n ecuaia (11.3) determinm valoarea
coeficientului care corespunde punctului B
1
de intersecie a dreptei A
1
B
1
din fig.
11.3 cu axa absciselor
g
h L
a
=
(11.5)
Pentru construirea figurii 11.3, pentru toate mrimile care intr n relaia 11.3
i care caracterizeaz construcia
automobilului, s-au luat urmtoarele
valori: ampatamentul 0 , 3 = L m;
distana de la axa punii din fa la
centrul de greutate 5 , 0 = a ;
ecartamentul automobilului
L B = 5 , 0 , nlimea centrului de
greutate
L h
g
= 3 , 0 , coeficientul de aderen
5 , 0 = . Aceleai valori s-au luat i
la celelalte grafice care ilustreaz
stabilitatea automobilului.
Conform figurii 11.3 patinarea
roii interioare a punii din spate
motoare ncepe la o anumit valoare
a coeficientului (fora tangenial
specific); cu ct este mai mare
reaciunea lateral total care
acioneaz la puntea spate Y
2
(sau
coeficientul
2
), cu att este mai mic
fora tangenial specific.
0,30
0,7
0,8
B
1
1
A
D
1
20
2
0,6
0,5
0,4
0,3
0,2
0,1
0 0,06 0,12 0,18 0,24
Fig.11.3.
Stabilitatea automobilului la alunecarea lateral
217
11.2.2. Cazul alunecrii laterale a punii spate motoare cnd roata interioar
patineaz
Dreapta A
1
B
1
din figura 11.3 are valabilitate numai ntre axa absciselor i
anumite valori ale coeficienilor i
2
, deoarece la alte valori ale coeficienilor
amintii ncepe alunecarea lateral a punii, dup care relaia (11.3) devine nereal.
Pentru determinarea dependenei dintre coeficienii
2
i , corespunztor
nceperii alunecrii laterale a punii cnd roata interioar patineaz se folosete
schema din figura 11.2. n momentul nceperii alunecrii laterale a punii,
reaciunea rezultant R
2e
, care acioneaz la roata exterioar a punii, devine egal
cu fora de aderen
e
R
Z
2
. De aici, folosind figura 11.2 se determin condiia
nceperii alunecrii laterale a punii cnd roata ei interioar patineaz:
( ) ( )
2 2 2
2
2
2
e e
i i
t R
R t
F Z Y
Z F
=
=
(11.6)
Deoarece forele tangeniale (de traciune) la roat F
ti
i F
te
au fost considerate
egale, folosind relaia (11.6) se obine:
( ) ( )
i e i e
R R R R
Z Z Z Z Y
2 2 2 2
2 2
2
+ = (11.7)
Din relaiile (11.7),(11.1) i (11.2) se poate obine relaia care d dependena
dintre coeficienii
20
i
0
, corespunztori nceperii alunecrii laterale a punii cnd
roata ei interioar patineaz:
B
h
a
h
g g
+ =
0
2
20
1 2 (11.8)
Rezolvnd mpreun relaiile (11.3) i (11.8), se obin relaiile pentru
coeficienii
20
i
0
, corespunztori nceperii alunecrii laterale, a punii motoare
din spate, cnd roata ei interioar patineaz:
=
2
2
20
2
1
2
B
h
h L
L
B
h
g
g
g
(11.9)
=
2
2
0
2
1
2
1
B
h
h L
B
h
a
g
g
g
(11.10)
Aceste valori corespund punctului D
1
din figura 11.3.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
218
11.2.3. Cazul alunecrii laterale a punii fr patinarea prealabil a roii ei
interioare
Pn acum s-au obinut ecuaii, care stabilesc raportul ntre parametrii
2
i la
nceputul patinrii roii interioare relaia (11.3) i la nceputul alunecrii ei
laterale cnd roata interioar patineaz, relaia (11.8). Pentru valori ale
coeficientului mai mici dect
0
(punctul D
1
din figura 11.3) alunecarea lateral a
punii din spate a automobilului cu roi rigide ncepe fr patinarea prealabil a
roii ei interioare. Schema forelor i reaciunilor, care acioneaz n acest caz la
puntea din spate a automobilului este artat n figura 11.4.
Fig.11.4.
Alunecarea lateral a roii fr patinarea prealabil a roii ei interioare este
caracterizat prin aceea c ambele reaciuni rezultante R
2i
i R
2e
, care acioneaz la
roata interioar respectiv exterioar a punii, ajungnd simultan la valorile forelor
de aderen
i
R
Z
2
i
e
R
Z
2
. Folosind figura 11.4 se obine:
( ) ( )
( ) ( )
2 2 2
2
2 2 2
2
2
2
e e
i i
t R e
t R i
F Z Y
F Z Y
=
=
(11.11)
Deoarece forele
i
t
F i
e
t
F sunt egale i innd seama de relaiile (11.11)
rezult:
( ) ( ) ( ) ( )
i e i e
R R R R i e i e
Z Z Z Z Y Y Y Y
2 2 2 2
2
2 2 2 2
+ = + (11.12)
h
B
F
te
R2e
Z
g
R2i
2
Y
2e
Y
2e
R = Z
Z
G m'
2
2
y
2
1
2
2i
Y
F
ti R2e
R = Z
2i R2i
Stabilitatea automobilului la alunecarea lateral
219
Rezolvnd ecuaia (11.12), se obine pentru coeficientul de stabilitate lateral a
punii
e 2
, la nceputul alunecrii laterale fr patinarea prealabil a roii
interioare, expresia:
2
2
2
2
2
2
2
1
1
+ =
B
h
a
L
a
h
g
g
e
(11.13)
Cu ajutorul relaiei (11.13) s-a trasat n figura 11.5 curba AD, (dreapta D
1
B
1
s-
a trasat ca n figura 11.3). Graficul din figura 11.5 caracterizeaz stabilitatea punii
motoare din spate a automobilului respectiv a ntregului automobil mpotriva
deraprii, din care cauz se numete caracteristica stabilitii laterale a
automobilului.
Fig.11.5.
Dac se ia 0 = n relaia (11.13), se obine valoarea ordonatei pentru punctul
A de intersecie a curbei AD
1
cu axa ordonatelor. n acest caz =
e 2
, ceea ce
corespunde punii conduse. Dac n relaia (11.13), se ia pentru fora tangenial
specific valoarea determinat de relaia (11.10) atunci se obine pentru
coeficientul
2
relaia (11.9).
0,06
0,3
0,2
0,1
0
0
0,4
2
D
1
0,18 0,12 0,24
1
B
A
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
220
11.2.4. Raportul dintre valorile limit ale razei de virare i viteza de deplasare
a automobilului
Pn acum, stabilitatea punii motoare din spate a automobilului s-a apreciat
prin raportul
2
dintre fora lateral total Y
2
i greutatea ce revine punii spate G
2
i
prin fora tangenial specific . n acelai timp, stabilitatea punii motoare din
spate, poate fi apreciat i prin raportul dintre valorile limit (de stabilitate) ale
razei de viraj R a automobilului i viteza sa uniform de deplasare (v = ct). Pentru
aceasta este necesar ca n relaiile obinute mai nainte, care caracterizeaz
nceputul micrii instabile a punii, s se exprime coeficienii
2
i prin viteza
(v) i prin raza de viraj a automobilului (R).
La micarea automobilului cu roi rigide pe o suprafa rigid, fora de
rezisten la rulare lipsete i pentru c micarea automobilului se consider
uniform i pe un drum orizontal ntreaga for de traciune se consum pentru
nvingerea rezistenei aerului. Atunci:
2 2 2
2
1
v W v A k v A c G F
x a t
= = = =
sau
kA W v
G
W
a
= =
2
(11.14)
Coeficientul
2
de stabilitate lateral a punii reprezint raportul reaciunii
laterale Y
2
la greutatea G
2
, repartizat punii din spate a automobilului. Folosind
relaia (10.64) i lund i = 0,5 se obine:
+ = =
t a
b
R
v
g G
Y
d
d 1
2 2
2
2
2
(11.15)
Conform relaiei (11.15), la aceleai valori ale coeficientului
2
, raportul dintre
raza de viraj (R) i viteza de deplasare a autovehiculului (v) poate fi diferit, n
funcie de valoarea acceleraiei unghiulare
t d
d
.
Pentru micarea uniform a automobilului (R=ct, v=ct) acceleraia unghiular
0 d d = t i n acest caz relaia (11.15) devine:
R
v
g
2
2
1
= (11.16)
Prin rezolvarea mpreun relaiile (11.3), (11.14) i (11.16) se obine:
+
=
a
h L
v
G
W
B g
v h
R
g
g
2
2
min
1
2
(11.17)
Stabilitatea automobilului la alunecarea lateral
221
Aceast relaie corespunde nceputului patinrii roii interioare.
Pentru determinarea R
min
care corespunde nceperii alunecrii laterale a punii
din spate fr patinarea prealabil a roii ei interioare, ne vom folosi de relaiile
(11.13), (11.14) i (11.16) i astfel se va obine:
( )
2
2
2
2
2 2
2
min
2
1
1
+
=
B
h
a L v G W
a
h
v
G
W
g
v
R
g
a
g
a
(11.18)
Aceast analiz poate fi fcut cu ajutorul graficelor, care redau raportul dintre
valorile limit ale coeficienilor
2
i (figura 11.5). n acest scop, dnd vitezei
automobilului v diferite valori, se poate cu ajutorul relaiei (11.14) se determine
valoarea corespunztoare acestei viteze. Mai departe, cu ajutorul fig. 11.5 pe linia
care corespunde unuia sau altuia din criteriile de stabilitate lateral a punii, se
gsete valoarea coeficientului
2
. Dup aceasta cu relaia (11.16) se calculeaz
valoarea razei de viraj (R) a autovehiculului, corespunztoare vitezei de deplasare a
acestuia a autovehiculului, corespunztoare vitezei de deplasare a acestuia (v).
Folosind procedeul indicat, n figura 11.6 s-a reprezentat caracteristica
stabilitii laterale a automobilului R
min
= f(v) pentru micarea uniform.
Construcia s-a fcut pentru acelai automobil, pentru care s-a construit graficul din
figura 11.5. Factorul de rezisten a aerului W care intr n relaia (11.14) s-a luat
egal cu 0,167 kgs
2
/m
2
. Curba D
1
B
1
din figura 11.6 corespunde nceperii patinrii
roii interioare a punii
motoare; ea tinde
asimptotic ctre verticala
care intersecteaz axa
absciselor la acea vitez a
automobilului care
corespunde valorii
coeficientului pentru
punctul B
1
din figura 11.5.
Curba AD
1
din figura 11.6
corespunde nceperii
alunecrii laterale a punii
fr patinarea prealabil a
roii ei interioare. Aceast
curb trece prin originea
axelor i este limitat de
punctul D
1
, intersecia cu
curba D
1
B
1
, analog cu
10
300
600
900
0
1200
20 30 40 50 v [m/s]
1500
R
min
[m]
D
1
A
B
1
R
0 min
v
0
Fig.11.6.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
222
figura 11.5.
Valorile R
0
i v
0
, corespunztoare acestui punct, pot fi determinate prin
rezolvarea mpreun a relaiilor (11.17) i (11.18) sau prin introducerea n relaiile
(11.9) i (11.10) a expresiilor pentru coeficienii
0
i
20
din relaiile (11.14) i
(11.16), deci
( ) [ ]
L g
B h a
W
G
h
B
R
g
a
g
2
0
2 1
2
(11.19)
( ) [ ]
( ) [ ]
2
2
0
2 1
2 1
B h h L
B h a
W
G
v
g g
g
a
=
(11.20)
11.3. Influena caracteristicilor constructive ale automobilului asupra
stabilitii sale la alunecarea lateral
Principalii parametri constructivi care influeneaz stabilitatea la alunecarea
lateral a automobilului sunt: poziia centrului de greutate prin coordonatele a i h
g
,
ecartamentul B i raza de giraie . n plus se va analiza i stabilitatea lateral a
automobilului cu puntea motoare dispus n fa.
Pentru a evidenia influena poziiei centrului de greutate (dimensiunile a i h
g
)
asupra stabilitii automobilului la alunecarea lateral, n figurile 11.7 i 11.8 s-au
trasat caracteristicile de stabilitate lateral pentru un anumit automobil lundu-se
diferite valori pentru coordonatele a i h
g
.
Graficul din figura 11.7
s-a construit pentru trei
valori ale raportului a/L,
adic 0,4, 0,5 i 0,6.
Conform datelor obinute
mrimea coordonatei (a),
crete stabilitatea
automobilului la derapare;
respectiv la aceeai valoare
a forei tangeniale specifice
coeficientul
2
se mrete.
Graficul din figura 11.8
s-a construit pentru trei
valori ale raportului h
g
/L,
adic 0,2, 0,3 i 0,4.
Conform datelor rezult c
mrirea nlimii h
g
,
0,06
0,3
0,2
0,1
0
0,4
2
0,18 0,12 0,24 0,30
1
D
0,5
0,6
a/L=0,4
D
1
D
1
Fig.11.7.
Stabilitatea automobilului la alunecarea lateral
223
micoreaz ntr-o oarecare msur stabilitatea lateral a automobilului.
Fig.11.8.
n figura 11.9 s-a trasat caracteristica stabilitii laterale a automobilului pentru
diferite valori ale ecartamentului B, lundu-se pentru raportul B/L valorile 0,4, 0,5
i 0,6. Mrirea ecartamentului (B) pentru acelai ampatament (L) mbuntete
puin stabilitatea lateral a automobilului ndeosebi pentru valori madii ale forei
tangeniale specifice .
Fig.11.9.
n afar de parametrii indicai (a/L, h
g
/L, B/L), care caracterizeaz construcia
automobilului, asupra stabilitii laterale a acestuia influeneaz i distribuia masei
n lungul automobilului, adic raza de giraie .
D
0,18 0
0,1
0,2
0,3
2
0,4
1
D
h /L=0,4
0,06 0,12
D
1
0,24
1
0,30
0,3
0,2
g
0,12
1
D
B/L=0,4
0
0,1
0,2
0,3
0,06
D
2
0,4
1
0,5
0,24 0,18
1
D
0,6
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
224
Conform relaiei (10.64) influena acceleraiei unghiulare d/dt asupra
mrimii reaciunii laterale totale Y
2
i prin urmare i asupra stabilitii laterale a
automobilului depinde de mrimea diferenei b-(
2
/a). Cu ct aceast diferen este
mai mic cu att influena acceleraiei unghiulare d/dt asupra stabilitii laterale
este mai mic. Dac ab =
2
, acceleraia unghiular d/dt nu influeneaz
stabilitatea lateral a automobilului.
La automobile de regul diferena
a
b
2
este pozitiv, dar nu are valoare
prea mare. n acest fel, pentru aceeai poziie a centrului de greutate (a/L= ct),
creterea razei de giraie () (distribuirea masei automobilului) acioneaz favorabil
asupra stabilitii automobilului la derapare.
Toate concluziile trase pn aici s-au referit la automobilele care au dispus
puntea motoare n spate. Stabilitatea lateral a automobilului se schimb n funcie
de modul de dispunere a punii motoare n fa sau n spate. De aceea n continuare
ne vom referi la stabilitatea la derapare a automobilului cu traciunea la puntea din
fa.
n figura 11.10 este
prezentat schema forelor i
momentelor, care acioneaz
asupra unui automobil n viraj cu
puntea motoare n fa. Deoarece
roile automobilului sunt
considerate rigide, nu se ine
seama de rezistena la rulare, iar
punctul B se deplaseaz sub un
unghi de bracare fa de axa
longitudinal a automobilului.
Suma reaciunilor tangeniale X
1i
i X
1e
care acioneaz la roile
punii din fa este egal cu fora
de traciune a automobilului F
t
.
Aplicnd aceast n punctul B
mijlocul punii fa se obine
schema din figura 11.11.
Momentul M
t
nu apare ca n
figura 10.13, deoarece fora de traciune se distribuie egal la roile motoare.
Reaciunea total Y
2
pentru cazul analizat se determin cu relaia (10.64) pentru i
e
=
0,5. Relaia (10.65) cu care se determin reaciunea lateral total Y
1
se schimb
puin. Din condiia de echilibru a sistemului (fig. 11.11) n raport cu o ax vertical
ce trece prin punctul A se obine:
c
g
F
cy
B
X
1e
X
1i
Y
1
O
F
j
A
Y
2
M
j
R
a
b a
L
B
R
Fig.10.11.
Stabilitatea automobilului la alunecarea lateral
225
( )
L
L F
t
b b v M
Y
t
sin
d
d
cos
2 2
1
+ +
= (11.21)
Din analiza rezultatelor obinute rezult c pentru acelai caracter al micrii
automobilului reaciunea lateral total Y
2
care acioneaz la puntea din spate nu
este influenat de modul de dispunere a punii motoare n spate sau fa. Rezult
ns c la automobilul cu puntea motoare dispus n fa, roile punii din spate
fiind eliberate de fore tangeniale, mrete mult stabilitatea lateral a acestei puni.
Reaciunea lateral total Y
1
, care acioneaz la roile punii din fa, se
micoreaz puin dac
aceste roi sunt
motoare. Datorit
acestui fapt stabilitatea
lateral a punii din
fa nu se nrutete.
n plus de aceasta,
alunecarea lateral a
punii din spate (fig.
11.11); de aceea n
aceleai condiii de
deplasare, automobilul
cu traciunea pe puntea
din fa are o
stabilitate la
alunecarea lateral mai
mare dect
automobilul cu traciunea pe puntea din spate.
11.4. Stabilitatea lateral a automobilului n timpul frnrii
Stabilitatea lateral a automobilului n timpul frnrii este influenat tot de
stabilitatea punii de spate a acestuia, n funcie de patinarea roii sale interioare i
de nceperea alunecrii ei laterale.
Pentru gsirea relaiilor, care caracterizeaz fiecare din fenomenele amintite,
este necesar s se cunoasc expresiile cu care se calculeaz reaciunile normale,
tangeniale i laterale care acioneaz la roile din spate ale automobilului.
Reaciunile normale se determin din ecuaiile 11.1, prin nlocuirea doar fa
de traciunea specific cu fora de frnare specific
f
(vezi capitolul 9), care
apare cu semnul minus datorit schimbrii sensului de acionare a forei de frnare.
Deci:
B
L
a
j
F
1
Y
g
c
Y
2
b
A
cy
F
a
R
B
F
t
Fig.11.11.
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
226
B
h
Y
a
h
G Z
g g
f R
i
=
2 2
1 5 , 0
2
(11.22)
B
h
Y
a
h
G Z
g g
f e R
+
=
2 2 2
1 5 , 0 (11.23)
Reaciunile tangeniale
i
X
2
i
e
X
2
care acioneaz la roata interioar i la
roata exterioar a punii spate sunt egale (datorit construciei transmisiei) pn n
momentul cnd una din roi ncepe s patineze; pn n acest moment coeficientul
de distribuire a forei de frnare (
0 e
i ) la frnele din stnga i din dreapta este egal
cu 0,5.
n acelai timp se consider c distribuirea forei de frnare la roile din fa i
din spate este caracterizat de raportul i (vezi cap.9).
11.4.1. Cazul nceperii patinrii la roata interioar a punii din spate frnate
Reaciunile tangeniale care acioneaz la roile din spate frnate ale
automobilului, pn la nceperea patinrii roii interioare se determin cu relaiile:
( )
a f e i
G i i X =
0 2
1
0
(11.24)
( ) ( )
a f e e
G i i X =
0 2
1 1
0
(11.25)
n momentul nceperii patinrii roii interioare (pstrm noiunea de patinare
dei n realitate este alunecare n direcie longitudinal) reaciunea
i
X
2
devine
egal cu valoarea forei de aderen
i
R
Z
2
. n acest caz:
( )
=
B
h
Y
a
h
G G i i
g g
f a f e 2 2 0
1 5 , 0 1
Din aceast egalitate determinm raportul
i
f
2
(omolog lui
2
din paragrafele
anterioare numai c acum se refer la frnare i a cptat indicele f) dintre
2 2
G Y respectiv:
( )
=
a
h L i i
h
B g e
f
g
f
i
0
1 2
1
2
2
(11.26)
Dac, conform celor afirmate mai nainte, se ia 5 , 0
0
= i se obine:
( )
+
=
a
h L i
h
B g
f
g
f
i
0
1
1
2
2
(11.27)
Dac n relaia (11.27) se ia 0 = i (toat fora de frnare se aplic numai prin
roile punii spate) i se schimb semnul termenului
g
h (ceea ce corespunde
Stabilitatea automobilului la alunecarea lateral
227
momentului trecerii de la automobilul frnat la automobilul n micare nefrnat),
atunci relaia (11.27) se transform n relaia (11.3).
Folosind relaia (11.27) s-a construit figura 11.12, care ilustreaz raportul
dintre coeficienii
i
f
2
i
f
pentru patru valori ale coeficientului i. Graficul s-a
construit pentru automobilul, caracterizat de aceleai date folosite i n graficul din
figura 11.5; coeficientul de aderen a fost luat egal 5 = . Curbele BD intersec-
teaz axa absciselor la valori ale forei de frnare specifice
f
corespunztoare
cazului cnd coeficientul forei laterale 0
2
=
i
f
.
( )
g
f
h L i
a
+
=
0
1
max
(11.28)
Fig.11.12.
Curbele (de fapt aproape drepte) BD reprezint valorile coeficienilor
f
i
f2
,
determinate de relaiile (11.27) i (11.28), pn la valorile la care ncepe simultan
patinarea roii interioare i alunecarea lateral a punii. Acest moment este artat n
figura 11.12 prin punctele D. Valorile
20
f
i
0
f
ale coeficienilor
2
f
i
f
,
corespunztoare acestei condiii, se determin din condiia c acest moment,
reaciunea rezultant, care acioneaz la roata exterioar a punii din spate, atinge
valoarea forei de aderen
e
R
Z
2
. Deoarece, cnd roata interioar patineaz,
toat fora lateral Y
2
se transmite prin roata exterioar, atunci:
( ) ( )
2 2
2
2
2
2e
R e
Z X Y = +
sau, folosind relaiile (11.23) i (11.25) se obine:
0,1
0,2
0,3
0,60
f2i
0,4
0,48 0,54 0,42 0,36 0,30 0,24 0,18 0,12 0,06
f
A
B
1
B
2
B
3 B
4
4
D
D
3
D
2
D
1
i=0
0,25
0,5
0,75
DINAMICA AUTOPROPULSRII AUTOVEHICULELOR PE ROI
228
( ) ( ) [ ]
2
2 2
2 2
0
2
2
0 0 0
1 5 , 0 1 1
= +
B
h
Y
a
h
G G i i Y
g g
f a f e
(11.29)
( ) [ ]
2
2 2
2 2
0
2
2
0 0
1 5 , 0 1 5 , 0
= +
B
h
Y
a
h
G G i Y
g g
f a f
(11.29)
Folosind relaiile (11.27), (11.29) i (11.29) se obin relaiile:
( )
( )
=
2
0
0
2
2
1 1
1
2
20
B
h
h L i
L i
B
h
g
g
g
f
(11.30)
( )
=
2
0
2
2
1 1
2
1
0
B
h
h L i
B
h
a
g
g
g
f
(11.31)
Cu aceste relaii se determin valorile coeficienilor
2
f
i
f
, care corespund
punctelor D din figura 11.12. Rezolvnd mpreun relaiile (11.29) i (11.27) i
eliminnd din aceste relaii raportul i, se obine
=
a
h
B
h
g
f
g
f
0 20
1
2
2
(11.32)
Aceast relaie reprezint curba care trece prin punctele D
1
, D
2
, D
3
i D
4
din
figura 11.12.
11.4.2. Cazul nceperii alunecrii laterale a punii din spatele frnate, cnd
roata interioar s-a blocat
Dreptele BD din figura 11.12 corespund nceperii patinrii roii interioare de la
puntea din spate frnate a automobilului. La o valoare oarecare a coeficientului
i
f
2
, care corespunde acestei drepte, coeficientul (fora de frnare specific)
f
poate fi mrit pn cnd puntea din spate nc nu ncepe s alunece lateral. Acest
lucru este posibil, deoarece la nceperea alunecrii roii interioare a punii, roata sa
exterioar nu alunec pe calea de rulare. n acest fel, chiar la blocarea roii, fora
transmis la frn poate fi mrit pn cnd puntea din spate nc nu a nceput s
alunece lateral. nceperea alunecrii laterale a punii cu roata blocat, este
Stabilitatea automobilului la alunecarea lateral
229
caracterizat tot de relaiile (11.26) i (11.29). Dar n acest caz raporturile i
e0
i i
0
nu mai rmn constante, ci se schimb, din cauz c mrirea forei la pedala de
frn provoac o mrire a forei de frnare numai pentru roata neblocat, roata
blocat avnd aceeai for. n acest fel, pentru determinarea raportului dintre
coeficienii
2 f
i
f
, care corespund nceperii alunecrii punii din spate frnate,
n cazul blocrii roii ei interioare, sunt dou relaii (11.26) i (11.29) cu patru
necunoscute. Pentru obinerea a nc unei relaii se folosete faptul c raportul
dintre reaciunile tangeniale
e
X
1
i
e
X
2
, care acioneaz la roile exterioare ale
punii din fa i din spate, n cazul blocrii roii interioare din spate a punii
frnate, rmne neschimbat i este determinat de raportul i
0
. Deci vom avea:
0
0
2
1
1 i
i
X
X
e
e
= (11.33)
Reaciunea tangenial total X
1
, care acioneaz la ambele roi din fa, este
egal cu
a f
G i i ntruct nici una din roile din fa nu este blocat, aceast
reaciune se distribuie la roi n mod egal (i
e0
= 0,5). Ca rezultat reaciunea
e
X
1
se
determin din expresia:
a f e
G i X = 5 , 0
1
(11.34)
Raportul dintre reaciunile tangeniale
e
X
2
i
i
X
2
se determin din expresia:
e
e
i
e
i
i
X
X
=
1
2
2
Dar deoarece reaciunea
i
X
2
(roata este blocat i alunec) este egal cu fora
de aderen
i
R
Z
2
, atunci din relaia (11.22) rezult:
=
B
h
Y
a
h
G
i
i
X
g g
f
e
e
e 2 2 2
1 5 , 0
1
(11.35)
You might also like
- Studiu de Nivel Privind Sistemul de Directie Al AutocamioanelorDocument20 pagesStudiu de Nivel Privind Sistemul de Directie Al AutocamioanelorEduArd BogdanNo ratings yet
- Laborator 3 Dinamica AutovehiculelorDocument11 pagesLaborator 3 Dinamica AutovehiculelorNiculescu George RobertNo ratings yet
- Punte Rigida Cu Patru BrateDocument9 pagesPunte Rigida Cu Patru BrateStefan IonutNo ratings yet
- Probleme Dinamica ExamenDocument17 pagesProbleme Dinamica Examenbogdan100% (1)
- Curs 1 Tot PDFDocument257 pagesCurs 1 Tot PDFRimniceanu Cornel100% (1)
- Cca2Document28 pagesCca2Demeter AlexandruNo ratings yet
- Mecanismul de Acţionare Si Transmisia DirecţieiDocument2 pagesMecanismul de Acţionare Si Transmisia DirecţieiAnonymous pn6VnENo ratings yet
- Proiectarea Sistemului de Franare PrezentareDocument25 pagesProiectarea Sistemului de Franare PrezentareTimciuc Iacob100% (1)
- AmbreiajDocument35 pagesAmbreiajMaria MiclauNo ratings yet
- Itinerar Tehnologic Disc FranaDocument5 pagesItinerar Tehnologic Disc FranaRobert BiaNo ratings yet
- Mecanism de Ghidare MacPhersonDocument19 pagesMecanism de Ghidare MacPhersonSabianNo ratings yet
- Punte Rigida 3 Brate - Suspensie AutoturismDocument28 pagesPunte Rigida 3 Brate - Suspensie AutoturismionNo ratings yet
- CCA2Document54 pagesCCA2Andrey LaiuNo ratings yet
- CURS 7 8 Sisteme de Franare Frane Saboti Disc 2019Document23 pagesCURS 7 8 Sisteme de Franare Frane Saboti Disc 2019Tiberiu NigaNo ratings yet
- PunteDocument33 pagesPunteRadu IulianNo ratings yet
- Sistem de DirecţieDocument25 pagesSistem de DirecţieCodreanu Petru100% (2)
- Calculul Dinamic: AutobetonieraDocument31 pagesCalculul Dinamic: AutobetonieraLucian CucuNo ratings yet
- Studiul TehnicoDocument134 pagesStudiul TehnicoGeorge DonosaNo ratings yet
- Constructia Si Functionarea Amortizoarelor Hidraulice Telescopice2Document69 pagesConstructia Si Functionarea Amortizoarelor Hidraulice Telescopice2Arcadie Vidrasco100% (1)
- VD2p08 Steering AckermannDocument3 pagesVD2p08 Steering AckermannBogdan NeacsuNo ratings yet
- Maniabilitatea Autovehiculelor ADocument6 pagesManiabilitatea Autovehiculelor AVeres Pal100% (1)
- Proiect SuspensieDocument9 pagesProiect SuspensieAndrei PopNo ratings yet
- Arbori CardaniciDocument7 pagesArbori CardaniciFlorian CiorobaNo ratings yet
- Studiu de Nivel DiferentialeDocument14 pagesStudiu de Nivel DiferentialeBuse Elena Carmina100% (1)
- CCA2 1161 Roncea Suspensie - AutoturismDocument33 pagesCCA2 1161 Roncea Suspensie - AutoturismStefan Roncea100% (1)
- Reglarea Jocului Sistemelor de FranareDocument7 pagesReglarea Jocului Sistemelor de FranareJustlook13No ratings yet
- Calculul Dinamic: AutobetonieraDocument41 pagesCalculul Dinamic: AutobetonieraLucian CucuNo ratings yet
- Transmisia Automata Electro-Hidraulica Secventiala Pentru Autovehicule Rutiere - Cutia de Viteze Automata Cu 6 Trepte de VitezaDocument8 pagesTransmisia Automata Electro-Hidraulica Secventiala Pentru Autovehicule Rutiere - Cutia de Viteze Automata Cu 6 Trepte de VitezaAndu DeaconescuNo ratings yet
- Procesul Autopropulsarii AutovehicululuiDocument18 pagesProcesul Autopropulsarii AutovehicululuibdanutiuNo ratings yet
- Diagnostic Are Auto - Puntea Si Suspensia Din FataDocument23 pagesDiagnostic Are Auto - Puntea Si Suspensia Din FataDragos Ene100% (1)
- Amortizoare MagnetoreologiceDocument16 pagesAmortizoare MagnetoreologiceCorbiiMari0% (1)
- Cutie de Viteza - Autoturisme - de - TerenDocument23 pagesCutie de Viteza - Autoturisme - de - TerenFinna SzabolcsNo ratings yet
- Desen Executie Sistem FranareDocument1 pageDesen Executie Sistem FranareZenoviu GavaNo ratings yet
- Calcul SuspensieDocument10 pagesCalcul SuspensiedantopanNo ratings yet
- AmbreiajDocument45 pagesAmbreiajAndyNo ratings yet
- PROIECT AUTO-suspensiaDocument8 pagesPROIECT AUTO-suspensiaijimia2001No ratings yet
- Servofrana VacuumaticaDocument6 pagesServofrana VacuumaticaAMG65R100% (1)
- 1.mecanism de GhidareDocument12 pages1.mecanism de GhidareBordea AlinNo ratings yet
- CCAR2 Proiect Adam Florin PDFDocument8 pagesCCAR2 Proiect Adam Florin PDFMihai Popescu100% (1)
- Tisa PCCA 2 Suspensie Autofurgonaul CCA 2 Suspensie AutofurgonDocument7 pagesTisa PCCA 2 Suspensie Autofurgonaul CCA 2 Suspensie AutofurgonPaul TisaNo ratings yet
- Variatoare ToroidaleDocument3 pagesVariatoare ToroidaleIgnat CosminNo ratings yet
- Autocisterna 176 KW 2300Document31 pagesAutocisterna 176 KW 2300Andrei123No ratings yet
- Sub 1Document1 pageSub 1Balazs RaymondNo ratings yet
- FranaDocument17 pagesFranaBoti NyaguyNo ratings yet
- Varianta A.2 SFDSDocument13 pagesVarianta A.2 SFDSAxapolis GeorgeNo ratings yet
- Tema 7 Sistemul de DirectieDocument31 pagesTema 7 Sistemul de DirectieCodrin Cuciurean100% (1)
- Scheme Cinematice TractoareDocument8 pagesScheme Cinematice Tractoarenifedan100% (2)
- Diagnosticarea SuspensieiDocument11 pagesDiagnosticarea SuspensieiMary Palade100% (2)
- Tambur de Frână (Proiect)Document6 pagesTambur de Frână (Proiect)Gabriel Podariu0% (1)
- Dinamica Rotii MotoareDocument6 pagesDinamica Rotii MotoareStefan VasiliuNo ratings yet
- 3.. DINAMICA Pe Ro'iDocument13 pages3.. DINAMICA Pe Ro'iIgor BeşleagăNo ratings yet
- Calculul Si Proiectarea PuntiiDocument4 pagesCalculul Si Proiectarea PuntiiDaniel Petcu100% (2)
- Curs 8Document14 pagesCurs 8Iovan Cătălin-DanielNo ratings yet
- Calculul Numeric 2Document9 pagesCalculul Numeric 2trifsebastianNo ratings yet
- Rezistenta La DemarajDocument6 pagesRezistenta La DemarajClaudia MădălinaNo ratings yet
- Dinamica Franarii Autovehiculelor Cu RotiDocument13 pagesDinamica Franarii Autovehiculelor Cu RotiLaurian TomseanuNo ratings yet
- Negoiu Georgian-Iulian T2Document3 pagesNegoiu Georgian-Iulian T2Iulian NgiNo ratings yet
- Cap-7-2 Compactare (Calcul Cilindri)Document7 pagesCap-7-2 Compactare (Calcul Cilindri)Laura-MariaDragomirNo ratings yet
- Proiectarea Preselor Mecanice Cu ManivelaDocument58 pagesProiectarea Preselor Mecanice Cu ManivelaRamiro PetreNo ratings yet
- Curs 10-Deformatii Pe FotogramaDocument5 pagesCurs 10-Deformatii Pe FotogramaAndreea DxNo ratings yet
- Mecanisme de Putere Ale Puntilor MotoareDocument37 pagesMecanisme de Putere Ale Puntilor Motoaregeorgehent0% (1)
- CuprinsDocument4 pagesCuprinsgeorgehentNo ratings yet
- 7transmisia LongitudinalaDocument21 pages7transmisia Longitudinalageorgehent100% (4)
- Cursul 3 Cutia de VitezeccaDocument46 pagesCursul 3 Cutia de VitezeccageorgehentNo ratings yet
- 6 EtansariDocument34 pages6 Etansarigeorgehent100% (2)
- Curs 1. Cinematic A Mecanismului Biela ManivelaDocument8 pagesCurs 1. Cinematic A Mecanismului Biela Manivelageorgehent100% (2)
- 1sistemul de DirectieDocument28 pages1sistemul de Directiegeorgehent100% (1)
- 2 Sistemul de Frânare Al AutomobiluluiDocument22 pages2 Sistemul de Frânare Al Automobiluluigeorgehent100% (1)
- Curs 3 Echilibrarea MotoarelorDocument8 pagesCurs 3 Echilibrarea Motoarelorgeorgehent100% (1)
- Constructia Motoarelor Pentru AutomobileDocument92 pagesConstructia Motoarelor Pentru AutomobilegeorgehentNo ratings yet
- Cursul 2 Dinamica Mecanismului MotoDocument17 pagesCursul 2 Dinamica Mecanismului MotogeorgehentNo ratings yet
- 1 AngrenajeDocument66 pages1 AngrenajeMihaela MoianuNo ratings yet
- Transmisii AutomateDocument34 pagesTransmisii AutomatevladyatorulNo ratings yet
- 5 - Cuplaje Curs Organe de Masini 2Document40 pages5 - Cuplaje Curs Organe de Masini 2EdencoloreNo ratings yet
- 4 RulmentiDocument22 pages4 Rulmenticriss_calinNo ratings yet
- 3 CureleDocument16 pages3 CurelegeorgehentNo ratings yet
- Transmisii AutomateDocument34 pagesTransmisii AutomatevladyatorulNo ratings yet
- 2 TransmisiiDocument16 pages2 TransmisiigeorgehentNo ratings yet
- Autopropulsarea Autovehiculelor Pe RotiDocument230 pagesAutopropulsarea Autovehiculelor Pe RotigeorgehentNo ratings yet
- MecanicaDocument90 pagesMecanicacrdiNo ratings yet
- Dictionar de Termeni TeologiciDocument87 pagesDictionar de Termeni TeologiciDubei VioricaNo ratings yet