Professional Documents
Culture Documents
Méthodes de Monte Carlo Pour La Finance
Uploaded by
Rajita EconomisteOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Méthodes de Monte Carlo Pour La Finance
Uploaded by
Rajita EconomisteCopyright:
Available Formats
Methodes de Monte Carlo pour la nance
DEA Statistiques et Mod`eles Aleatoires en
Economie et
Finance
Universite Paris VII
Emmanuel TEMAM
Universite Paris VII, LPMA
temam@math.jussieu.fr
Avril 2004
2
Table des mati`eres
1 Introduction 5
1.1 Presentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Rappels sur les methodes de Monte Carlo . . . . . . . . . . . . . . . . . . . . 6
1.3 Notations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2 Schemas dapproximation dEDS 9
2.1 Simulation du mouvement Brownien et des processus rattaches . . . . . . . . 9
2.1.1 Simulation du mod`ele de Black Scholes . . . . . . . . . . . . . . . . . 9
2.1.2 Une construction du mouvement Brownien . . . . . . . . . . . . . . . 10
2.2 Discretisation dEDS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1 Le schema dEuler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.2 Le schema de Milshtein . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.3 Schemas dordre superieur . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3 Methodes speciales pour les options exotiques . . . . . . . . . . . . . . . . . . 17
2.3.1 Options asiatiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3.2 Options sur maximum . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.3.3 Options barri`eres . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3 Reduction de variance 29
3.1 Fonctions dimportance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.1 Un exemple en nance . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.2 Generalites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.1.3 Theor`eme de Girsanov et fonctions dimportance pour les diusions . 31
3.2 Variables antithetiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.3 Variables de contr oles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.1 Theorie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.2 Exemples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.3.3 Valeur moyenne et conditionnement . . . . . . . . . . . . . . . . . . . 38
4 Calcul des sensibilites 41
4.1 Rappels sur les sensibilites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.2 Approche par dierences nies . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3 Amelioration des techniques pour Monte Carlo . . . . . . . . . . . . . . . . . 42
4.3.1 Notion de processus tangent . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3.2 Applications aux calculs de couverture . . . . . . . . . . . . . . . . . . 44
4.4 Calcul de Malliavin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3
4 TABLE DES MATI
`
ERES
4.4.1 Introduction au calcul de Malliavin . . . . . . . . . . . . . . . . . . . . 47
4.4.2 Applications aux calculs des sensibilites . . . . . . . . . . . . . . . . . 51
5 Les options americaines 55
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.2 Lalgorithme de Longsta Schwartz . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2.1 Une equation de programmation dynamique pour
. . . . . . . . . . 57
5.2.2 La methode de regression . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.2.3 Du Monte Carlo pour le probl`eme de regression . . . . . . . . . . . . . 58
5.3 Approximation desperances conditionnelles . . . . . . . . . . . . . . . . . . . 59
5.3.1 Calcul de Malliavin : complements . . . . . . . . . . . . . . . . . . . . 60
5.4 Application `a levaluation doptions americaines . . . . . . . . . . . . . . . . . 67
Chapitre 1
Introduction
1.1 Presentation
Dans un mod`ele stochastique, les prix des actifs sont representes comme la solution dune
equation dierentielle stochastique. Le probl`eme essentiel pose les mathematiques nanci`eres
est devaluer les produits derives sur ces actifs.
Dans la plupart des cas, le payo de ces produits est donne par une fonction de lactif sous-
jacent `a une (ou des) date(s) future(s). Le prix, dans un mod`ele complet, est alors lesperance
sous lunique probabilite risque neutre du payo actualise. Linteret numerique est donc de
calculer cette esperance de la mani`ere la plus ecace et la plus rapide possible.
Il existe de nombreux types de methodes pour cela :
Ces esperances peuvent `a laide de la formule de Feynman-Kac secrire comme la solutions
dequations aux derivees partielles. Ainsi, on peut utiliser les methodes existantes de type
elements nis ou dierences nies.
Il existe egalement les methodes dites darbre, qui consistent ` a approcher la solution de
lequation dierentielle stochastique par une chane de Markov discr`ete.
Enn, les methodes de Monte Carlo sur lesquelles nous nous concentrerons. Ces methodes
necessitent de savoir simuler lEDS du sous-jacent. Souvent, il faut recourir ` a des schemas
numeriques, ce sera lobjet du chapitre 1. De plus, meme cette discretisation eectuee, il
peut saverer que la methode ne soit pas ecace, par exemple lorsque la variance est trop
elevee. Les methodes de reduction de variance permettent deviter ce genre de diculte
(voir chapitre 2).
La nance pose dautres probl`emes nettement plus ardus et qui sont encore aujourdhui lobjet
de developpement constant :
levaluation du prix nest pas le plus important et meme un prix ne sert ` a rien si on ne
donne pas une strategie. Levaluation des grecques (les derivees du prix par rapport au
point initial ou `a la volatilite) est un probl`eme complexe du au fait quil sagit dune
dierentielle (voir chapitre 3).
En fait, sur le marche, on ne dispose pas de volatilite. Il faut evaluer les param`etres du
mod`ele `a laide de prix de certaines options tellement liquides quelles sont cotees directe-
ment. Ce type de probl`eme sappelle la calibration.
Enn, il existe des options qui peuvent etre exercees ` a nimporte quel instant. Ce sont les
options americaines et leurs evaluations posent des probl`emes plus complexes (voir chapitre
5
6 CHAPITRE 1. INTRODUCTION
4).
1.2 Rappels sur les methodes de Monte Carlo
Les methodes de Monte Carlo sont nees gr ace ` a Louis Buon mathematicien du XV II
eme
si`ecle. Il a prouve que si lon se donne un parquet dont les lattes sont ecartees dune longueur
d, et que lon jette toujours de la meme hauteur une aiguille de longueur l la probabilite
que laiguille touche deux stries est de ????. Il a ainsi entrevu une possibilite pour calculer le
nombre numeriquement. En eet, en lan cant un grand nombre daiguilles et en comptant
celles qui touchaient deux stries il detenait une valeur approximative de la probabilite. Cette
experience repose sur un theor`eme : la loi forte des grands nombres.
Theor`eme 1.1 (Loi forte des grands nombres). Soit (X
i
, i 1) une suite de variables
aleatoires independantes et identiquement distribuees (i.i.d.) telles que E ([X
1
[) < +, alors
lim
n+
_
1
n
n
i=1
X
i
_
= E(X
1
) .
Ce theor`eme permet dutiliser des algorithmes probabilistes pour calculer nimporte quelle
esperance. Considerons le cas o` u les variables aleatoires suivent une loi uniforme sur [0, 1].
Alors un generateur aleatoire permet de simuler cette loi. Pour approcher son esperance, il
sut donc de simuler n fois cette loi et de faire la moyenne des simulations. Cest aussi pour
cela que le terme de gauche est souvent appele moyenne arithmetique et on le notera
X
n
Il faut remarquer egalement que cette methode permet de calculer un certain nombre dinteg-
rales. Soit I =
_
1
0
f(u)du o` u f est une fonction integrable. On voit immediatement que I se
reecrit comme I = E[(f(U))] o` u U est une variable aleatoire de loi |
[0,1]
. En appliquant
lalgorithme precedant `a X
i
= f(U
i
) on calcule I.
Le probl`eme se pose maintenant devaluer theoriquement lecacite de cette methode. Il
existe des theor`emes qui permettent de calculer la vitesse de convergence dune methode de
Monte Carlo.
Theor`eme 1.2 (Theor`eme de la Limite Centrale). Soit (X
i
, i 1) une suite de variables
aleatoires, independantes et identiquement distribuees telles que E(X
2
i
) < +. On pose
2
=
Var(X
2
i
), alors
2
_
E[(X
1
)]
1
n
(X
1
+. . . +X
n
)
_
L
G o` u G ^(0, 1).
Remarque 1.1. Contrairement aux methodes non probabilistes, la methode de Monte Car-
lo, utilisee pour calculer des integrales, ne necessite pas de fonctions reguli`eres.
Lerreur que donne le Theor`eme de la Limite Centrale nest pas bornee car le support de
la gaussienne est R.
De ce theor`eme on peut deduire des intervalles de conance qui sont des indicateurs im-
portants de la performance dune methode de Monte Carlo.
Il faut egalement noter que levaluation de la variance est cruciale pour mesurer lecacite
de la methode. En eet, en supposant que celle-ci nest pas aleatoire, on peut reecrire le
1.3. NOTATIONS 7
theor`eme de la limite centrale comme :
n
_
E[(X
1
)]
1
n
(X
1
+. . . +X
n
)
_
L
G o` u G ^(0,
2
).
Ainsi, si on veut construire des intervalles de conance, leurs largeurs depend du nombre de
simulations et de la variance. Pour resume, lecacite des methodes de Monte Carlo secrit
n
.
Pour evaluer la variance, on dispose destimateurs. Soit (X
1
, . . . , X
n
), une suite de variables
aleatoires veriant les hypoth`eses du theor`eme de la limite centrale. Lestimateur standard
de la variance est :
n
2
=
1
n
n
i=1
(X
i
X
n
)
2
.
Cet estimateur est construit par la loi forte des grands nombres. En eet, Var(X) = E
_
X
2
(E[X])
2
. En approchant, les deux esperances par leurs moyennes arithmetiques on retombe
sur
n
. Cependant, on peut montrer que cette estimateur est biaise E
_
n
2
_
=
n
n1
Var(X).
Lestimateur sans biais est donc :
2
n
=
1
n 1
n
i=1
(X
i
X
n
)
2
.
Pour plus de details sur les methodes de Monte Carlo on pourra consulter [40, 44]. Par ailleurs,
nous aurons besoin dun theor`eme qui lie les methodes probabilistes et analytiques :
Theor`eme 1.3. (i) Supposons que b et a sont lipschitziennes et quil existe une solution u
C
1,2
p
` a lequation parabolique
0 =
u
t
+
d
j=1
b
j
u
x
j
+
1
2
d
i,j=1
(aa
)
ij
2
u
x
i
x
j
, sur [0, T] R
d
g = u(T, ) sur R
d
, (1.1)
alors
u(t, x) = E[g(X
T
)[X
t
= x] et g(X
T
) = E[g(X
T
)] +
_
T
0
x
u(t, X
t
)a(X
t
)dW
t
. (1.2)
(ii) Si a C
4
b
, b C
2
b
et g C
4
p
, alors la reciproque est vraie et u C
4
p
.
1.3 Notations
Dans la suite on notera S
t
la solution de lequation dierentielle stochastique, X
t
la solution
dune equation dierentielle stochastique generale.
8 CHAPITRE 1. INTRODUCTION
On commence par introduire quelques notations. On identiera un element x de R
d
au vecteur
colonne associe de coordonnees x
j
, j = 1, . . . , d. On notera I
d
la matrice identite de M
d
et e
d
le vecteur unite de R
d
. La norme euclidienne sur R
d
ou M
d
sera notee ||. Pour un element a
de M
d
, on notera a
i
le vecteur ligne correspondant ` a sa i-`eme ligne et a
j
le vecteur colonne
correspondant `a sa j-`eme colonne. La transposee de a M
d
sera notee a
. Pour un ensemble
de point (x
i
)
d
i=1
, on notera Vect[(x
i
)
d
i=1
] le vecteur colonne de composantes x
i
. Pour x
R
d
, on notera diag [x] la matrice diagonale de M
d
dont les elements diagonaux sont les x
i
.
Pour une fonction f : R
d
R
n
, on notera f sa matrice Jacobienne, i.e. (f)
ij
= f
i
/x
j
.
Si f : (R
d
)
k
R
n
, on notera
f, la matrice Jacobienne obtenue en derivant par rapport
`a sa -`eme composante vectorielle, i.e. (
f(x
1
, . . . , x
k
))
ij
= f
i
(x
1
, . . . , x
k
)/x
j
. On ecrira
parfois simplement
x
f. On notera C
k
p
(resp. C
k
b
) lensemble des fonctions C
k
` a croissance
polyn omiale (resp. bornees) dont les derivees sont egalement ` a croissance polyn omiale (resp.
bornees). Lorsque la fonction est seulement denie sur A, on notera C
k
(A), C
k
p
(A) et C
k
b
(A).
^(m, ) designera la loi normale de moyenne m et de matrice de variance-covariance . On
notera souvent par C > 0 une constante generique qui peut changer de valeur dune ligne ` a
lautre.
Chapitre 2
Schemas dapproximation dEDS
Le but de cette partie est de decrire les methodes utilisees pour la simulation trajectorielle
dun processus donne. Cette simulation est necessaire lorsque lon veut calculer une option
dependant de la trajectoire (options asiatiques, barri`eres, etc...) dont le prix peut secrire :
E[f (X
s
, s T)] ,
o` u est la fonctionnelle du processus X.
2.1 Simulation du mouvement Brownien et des processus rat-
taches
Nous commen cons par la simulation du mouvement Brownien. La simulation approximative
dune trajectoire du mouvement Brownien est un algorithme simple. En eet, soit h un
intervalle de discretisation. Soit (G
k
, 0 k N) une realisation dune famille de variables
aleatoires normales de moyenne 0 et de variance 1. Pour obtenir une realisation de (W
ph
, 1
p N), il sut de calculer :
W
h
ph
=
1kp
G
k
.
On peut remarquer que dans ce cas la loi de lapproximation (W
h
ph
, 1 p N) est identique
`a la loi du vecteur (W
ph
, 1 p N) : il ny a donc pas derreur de discretisation.
2.1.1 Simulation du mod`ele de Black Scholes
Soit
S
t
= xexp
__
r
2
2
_
t +W
t
_
.
En utilisant le paragraphe precedent, on construit une simulation exacte en loi du vecteur
(S
ph
, 1 p N) en posant :
S
h
ph
= xexp
__
r
2
2
_
ph +W
h
ph
_
.
9
10 CHAPITRE 2. SCH
EMAS DAPPROXIMATION DEDS
Il faut remarquer que lon peut obtenir une simulation exacte quand la volatilite est une
fonction du temps puisque
_
(p+1)h
ph
s
dW
s
,
reste une suite de variable aleatoire gaussienne de moyenne 0 et de variance
_
(p+1)h
ph
2
s
ds.
2.1.2 Une construction du mouvement Brownien
Dans certains cas nous avons besoin dune methode de simulation qui peut etre ranee en
certains points de la trajectoire. Cela est une des caracteristiques de la methode suivante. Il
faut noter que cet algorithme donne aussi une construction dune trajectoire du mouvement
Brownien.
Cette simulation repose sur le calcul de la loi conditionnelle de Wt+s
2
sachant W
s
et W
t
. Si
s t, le vecteur (W
s
, Wt+s
2
, W
t
) est un vecteur gaussien. On peut donc trouver deux nombres
et tels que la variable aleatoire Z
,
denie par
Z
,
= Wt+s
2
W
s
W
t
,
soit independante de (W
s
, W
t
). Le vecteur (Z
,
, W
s
, W
t
) est encore un vecteur gaussien de
moyenne nulle. Donc, Z
,
est independante de W
s
et de W
t
si et seulement si
Cov(Z
,
, W
s
) = 0 et Cov(Z
,
, W
t
) = 0.
Comme
Cov(Z
,
, W
s
) = E
_
Ws+t
2
W
s
_
E(W
2
s
) E(W
2
t
),
et que t et s
E(W
s
W
t
) = t s = inf(s, t),
on obtient
Cov(Z
,
, W
s
) = s s s,
et :
Cov(Z
,
, W
s
) =
s + t
2
s t.
Il est clair que les deux covariances sannulent si et seulement si = = 1/2. De plus,
comme Z
,
est une combinaison lineaire delements dun vecteur gaussien, cest une variable
gaussienne. Pour determiner enti`erement sa loi, il sut de calculer sa moyenne et sa variance.
Si Z = Z
1/2,1/2
alors
Z = Xt+s
2
1
2
(W
s
+W
t
).
Ainsi E(Z) = 0 et
Var(Z) = E(Z
2
) = E
_
_
Ws+t
2
s +t
2
(W
s
+W
t
)
_
2
_
=
t +s
2
+
t
4
+
s
4
t +s
2
s +
s
2
=
1
4
(t s). (2.1)
2.2. DISCR
ETISATION DEDS 11
Z peut donc secrire :
Z =
1
2
t sG
t,s
,
o` u G
t,s
est une variable aleatoire gaussienne de moyenne nulle et de variance 1, independante
de (W
s
, W
t
).
Remarque 2.1. On peut montrer que G
t,s
est independante de (W
u
, u s) et (W
u
, u t).
On peut resumer ce raisonnement comme suit :
_
Wt+s
2
=
1
2
(W
t
+W
s
) +
1
2
t sG
t,s
G
t,s
est independant de (W
u
, u s) et (W
u
, u t),
(2.2)
Cela permet denvisager une procedure de simulation (ou de construction) de la trajectoire
de (X
s
, 0 s 1)
1. Calculer X
1
avec une variable ^(0, 1),
2. Utiliser 2.2, avec s = 0 et t = 1 pour simuler X
1/2
,
3. Utiliser 2.2, avec s = 0 et t = 1/2 pour simuler X
1/4
,
4. Utiliser 2.2, avec s = 1/2 et t = 1 pour simuler X
3/4
,
5. et ainsi de suite !
Cette methode peut etre utile pour calculer les chemins du processus de Wiener sur des
meshs dont la taille se reduit de plus en plus.
2.2 Discretisation dEDS
La methode de Monte Carlo utilisee pour approcher E[f(X
T
)] suppose que lon sait simuler
la loi de la variable aleatoire X
T
. Or, en general, on ne peut pas resoudre explicitement
lequation dierentielle stochastique associee au processus X. Par exemple, la plupart des
mod`eles de taux dinteret conduisent ` a des equations qui nont pas de solutions explicites.
De plus, meme si on trouve une solution, celle-ci peut etre trop complexe pour etre simulee
directement. Ainsi, par analogie avec les EDP, il est naturel de chercher ` a simuler une solution
`a partir de lequation elle-meme en utilisant des schemas dapproximation. Ainsi, la methode
de Monte Carlo va consister en lapproximation de E[f(X
T
)] par
i
f(
X
n
t
) o` u
X
n
est le
schema. Lerreur de ces methodes a deux causes : une erreur statistique et une erreur liee ` a
la discretisation.
2.2.1 Le schema dEuler
Notre but est de trouver un schema approchant la solution dune equation dierentielle sto-
chastique. Soit (X
t
, t 0) le processus d-dimensionnel solution de
X
t
= X
0
+
_
t
0
b(X
s
)ds +
_
t
0
(X
s
)dW
s
, (2.3)
o` u (W
t
, t 0) est un mouvement Brownien r-dimensionnel.
12 CHAPITRE 2. SCH
EMAS DAPPROXIMATION DEDS
Le schema le plus simple est celui dEuler. Soit n le nombre dintervalles de discretisation
choisi et h = T/n. La solution exacte verie :
X
h
= X
0
+
_
h
0
b(X
s
)ds +
_
h
0
(X
s
)dW
s
.
En se fondant sur la denition dun processus dIt o, une approximation naturelle est X
h
denie par :
X
h
X
0
+b(X
0
)h +(X
0
)(W
h
W
0
).
En procedant par recurrence, on obtient le schema dEuler pour lequation dierentielle sto-
chastique (2.3) :
X
n
0
= X
0
,
X
n
t
k+1
=
X
n
t
k
+b(
X
n
t
k
)h +(
X
n
t
k
)(W
t
k+1
W
t
k
).
(2.4)
Comme lon est en dimension superieur ` a 1, il faut faire attention aux produits matriciels :
X
n
0
= X
0
,
X
n,i
t
k+1
=
X
n,i
t
k
+b
i
(
X
n
t
k
)h +
r
j=1
i,j
(
X
n
t
k
)(W
j
t
k+1
W
j
t
k
) 1 i d
(2.5)
Ce schema est une generalisation naturelle aux EDS des schemas dEuler utilises pour les
equations dierentielles ordinaires. La simulation dun schema dEuler est extremement simple
puisquil sut de simuler la variable gaussienne W
h
W
0
= W
h
.
Le theor`eme suivant donne les resultats de convergence connus pour le schema dEuler. Nous
renvoyons au polycopie sur les methodes de Monte Carlo pour les demonstrations (voir aussi
[22, 23, 55]).
Theor`eme 2.1. Soient b et deux fonctions lipschitziennes. Soit (W
t
, t 0) un mouvement
Brownien r-dimensionnel. On note (X
t
, t 0) lunique solution de
dX
t
= b(X
t
)dt +(X
t
)dW
t
, X
0
= x,
et par (
X
n
kh
, k 0) la suite de variables aleatoires denies par lequation (2.4). Alors, pour
tous q 1 :
Convergence forte :
E
_
sup
k,khT
X
n
kh
X
kh
2q
_
Ch
q
.
De plus, pour tous < 1/2, presque s urement
lim
h0
h
sup
k,khT
X
n
kh
X
kh
= 0,
2.2. DISCR
ETISATION DEDS 13
Convergence faible : Si b et sont des fonctions C
4
avec des derivees bornees jusqu` a
lordre 4 et f est une fonction C
4
` a croissance polyn omiale avec des derivees bornees jusqu` a
lordre 4 si h = T/N, alors il existe une constante C
T
telle que
E(f(X
T
)) E
_
f(
X
n
T
)
_
C
T
(f)
N
.
Remarque 2.2. Ce theor`eme prouve que la vitesse de convergence dans L
2
est de lordre
de h
1/2
et que la vitesse de convergence presque sure est dordre h
1/2
, pour tout > 0. Le
deuxi`eme resultat montre que pour des fonctions reguli`eres, la vitesse de convergence en loi
du schema est dordre h.
2.2.2 Le schema de Milshtein
Pour les equations dierentielles ordinaires, le schema dEuler peut etre ameliore par les
methodes de Runge Kutta. Plusieurs schemas dordre superieur ont ete proposes pour les
EDS. Nous verrons cependant que leur mise en oeuvre reste delicate.
Le plus simple schema dordre 2 est le schema de Milshtein. Il permet de faire converger ` a
une vitesse superieure dans les espaces L
p
mais est dicile ` a simuler quand la dimension est
strictement plus grande que 1 et converge en loi ` a la meme vitesse que le schema dEuler.
Cas de la dimension 1
Nous commen cons par construire le schema de Milshtein quand d = r = 1. Ce schema est
deni par
X
n
0
= x et pour k 1 :
X
n
((k + 1)h) =
X
n
kh
+b
_
X
n
kh
_
h +
_
X
n
kh
_
_
W
(k+1)h
W
kh
_
+
X
n
kh
)(
X
n
kh
)
_
(k+1)h
kh
(W
s
W
kh
) dW
s
.
(2.6)
Remarque 2.3. Il est facile de comprendre comment le nouveau terme apparat en regardant
lequation
dX
t
= (X
t
)dW
t
.
On peut etendre le schema dEuler ` a tous t dans [t
k
, t
k+1
] par interpolation lineaire. Si t
k
= kh
X
n
t
=
X
n
t
k
+
_
X
n
t
k
_
(W
t
W
t
k
) .
X
n
t
donne une approximation de X
t
sur lintervalle [t
k
, t
k+1
] qui est meilleure que
X
n
(t
k
).
On peut esperer que (
X
n
t
) est une meilleure approximation de (X
t
) que (
X
n
t
k
).
Un bon candidat pour un schema dordre superieur est
X
n
t
=
X
n
t
k
+
_
t
t
k
X
n
s
_
dW
s
.
Ce schema peut etre approche en utilisant des developpements de Taylor
X
n
t
_
=
_
X
n
t
k
+
_
X
n
t
k
_
(W
t
W
t
k
)
_
_
X
n
t
k
_
+
X
n
t
k
_
X
n
t
k
_
(W
t
W
t
k
) .
14 CHAPITRE 2. SCH
EMAS DAPPROXIMATION DEDS
Cela conduit au schema suivant
X
n
t
=
X
n
t
k
+
_
X
n
t
k
_
(W
t
W
t
k
) +
_
X
n
t
k
_
X
n
t
k
_
_
t
t
k
(W
t
W
t
k
) dW
s
.
Nous avons retrouve le schema de Milshtein quand b = 0. Les calculs precedents setendent
au cas o` u b ,= 0.
Dun point de vue pratique il est important de noter que par la formule dIt o :
_
(k+1)h
kh
(W
s
W
kh
) dW
s
=
1
2
_
_
W
(k+1)h
W
kh
_
2
h
_
.
Le schema de Milshtein se reecrit donc :
X
n
(k+1)h
=
X
n
kh
+
_
b
_
X
n
kh
_
1
2
X
n
kh
)(
X
n
kh
)
_
h +
_
X
n
kh
_
_
W
(k+1)h
W
kh
_
+
1
2
X
n
kh
)(
X
n
kh
)
_
W
(k+1)h
W
kh
_
2
.
Ce schema est facile `a mettre en oeuvre car les variables aleatoires (W
(k+1)h
W
kh
, k 0)
sont impliquees.
Exemple 2.1. Considerons le cas o` u (S
t
, t 0) est une diusion log-normale denie par :
dS
t
= S
t
(rdt +dW
t
) , S
0
= x.
Soit W
k
= W
(k+1)h
W
kh
. Le schema dEuler secrit
X
n
(k+1)h
=
X
n
kh
(1 +rh +W
k
) ,
et le schema de Milshtein
X
n
(k+1)h
=
X
n
kh
_
1 +
_
r
1
2
2
_
h +W
k
+
1
2
2
(W
k
)
2
_
.
Le schema de Milshtein en dimension superieure Quand le nombre r de mouvements
Brownien impliques dans lequation dierentielle stochastique est plus grand que 1, le schema
de Milshtein secrit comme
X
n
(k+1)h
=
X
n
kh
+b
_
X
n
kh
_
h +
_
X
n
kh
_
_
W
(k+1)h
W
kh
_
+
p
j,l=1
(
j
l
) (
X
n
kh
)
_
(k+1)h
kh
_
W
j
s
W
j
kh
_
dW
l
s
,
(2.7)
avec, pour 1 i n
(
j
l
)
i
(x) =
n
r=1
ij
(x)
x
r
rl
(x).
Ces formules sobtiennent de la formule de Taylor comme ` a lordre 1.
2.2. DISCR
ETISATION DEDS 15
Remarque 2.4. Le schema de Milshtein est dicile ` a implementer car lon doit simuler le
vecteur
_
W
j
(k+1)h
W
j
kh
,
_
(k+1)h
kh
_
W
j
s
W
j
kh
_
dW
l
s
_
,
pour 1 j p, 1 l p. Il est facile de voir que la simulation de
_
(k+1)h
kh
_
W
j
s
W
j
kh
_
dW
l
s
,
ne peut faire intervenir que W
(k+1)h
W
kh
. Il nexiste pas ` a ce jour de methode ecace pour
la simulation de ces lois.
Quand p = 2, il est equivalent de simuler
_
W
1
h
, W
2
h
,
_
h
0
W
1
s
dW
2
s
W
2
s
dW
1
s
_
,
et la methode decrite dans [26] est compliquee.
Le schema de Milshtein peut etre utilise facilement quand il nest pas necessaire de simuler
_
h
0
W
1
s
dW
2
s
W
2
s
dW
1
s
. Cest le cas en dimension 1 ou quand la condition de commutativite
suivante est satisfaite
(C) Pour tous j, k dans 1, . . . , p et pour tous x R
n
:
j
(x)
k
(x) =
k
(x)
j
(x).
Sous lhypoth`ese (C), on peut reecrire le schema de Milshtein comme
X
n
(k+1)h
=
X
n
kh
+
_
_
b
_
X
n
kh
_
1
2
p
j=1
(
j
j
)(
X
n
kh
)
_
_
h +
_
X
n
kh
_
_
W
(k+1)h
W
kh
_
+
1
2
p
j,l=1
(
j
l
) (
X
n
kh
)
_
W
j
(k+1)h
W
j
kh
__
W
l
(k+1)h
W
l
kh
_
.
On a alors seulement besoin de
_
(W
j
(k+1)h
W
j
kh
), k 0, 1 j p
_
.
Le theor`eme suivant donne la vitesse de convergence du schema de Milshtein
Theor`eme 2.2. On suppose que b et sont deux fois continuement dierentiables avec des
derivees bornees. On note (X
t
, t 0) lunique solution de
dX
t
= b(X
t
)dt +(X
t
)dW
t
, X
0
= x,
et par (
X
n
kh
, k 0) la suite de variables aleatoires denis par (2.7). Alors
convergence forte :
pour tous q 1, sup
k,khT
E
_
X
kh
X
n
kh
q
_
Ch
q
,
De plus, pour tous < 1, on a
lim
h0
1
h
sup
k,khT
X
kh
X
n
kh
= 0,
16 CHAPITRE 2. SCH
EMAS DAPPROXIMATION DEDS
Convergence en loi : Si b et sont deux fonctions C
4
avec des derivees bornees jusqu` a
lordre 4 et si f est une fonction ` a croissance polyn omiale C
4
avec des derivees bornees
jusqu` a lordre 4, alors il existe une constante C
T
(f) > 0 telle que
E(f(X
T
)) E
_
f(
X
n
T
)
_
C
T
(f)
N
.
Remarque 2.5. Il faut remarquer que ce resultat ne depend pas de lhypoth`ese de commu-
tativite (C).
Le schema de Milshtein ameliore les vitesses de convergence trajectorielles : il est dordre h
alors que le schema dEuler est dordre
h. Neanmoins, la vitesse de convergence pour des
fonctions reguli`eres est la meme. Or cest ce type de convergence qui est important en nance
pour les methodes de Monte Carlo. De plus, le schema de Milshtein necessite la simulation de
termes supplementaires ce qui nuit ` a sa vitesse dexecution. En consequence, dans la plupart
des cas on utilisera le schema dEuler.
2.2.3 Schemas dordre superieur
Nous avons vu quil etait facile dobtenir des vitesses de convergence trajectorielle dordre
h
(schema dEuler) ou dordre h (schema de Milshtein). Il est naturel dessayer de construire
des schemas dordre superieurs. Toutefois, un resultat de Clark and Cameron (see [16] ou [23])
prouve que, vis `a vis de la norme L
2
le schema dEuler est optimal dans la classe des schemas
nutilisant que les variables W
ph
, p 1. Si on accepte dutiliser plus que ces increments on
peut construire des schemas dordre arbitraire (voir [39]). Ces schemas sont tr`es peu utilises
en nance.
Pour tout developpement supplementaire : [56, 39, 23, 22], [36], [55] et [39].
Methodes de Romberg pour Euler et Milshtein Une meilleure mani`ere dameliorer
sensiblement les vitesses de convergence en loi est dutiliser la methode dextrapolation de
Romberg.
Talay and Tubaro [57] et Bally et Talay [6, 7] ont montre que lerreur faible de discretisation,
du schema dEuler en particulier, peut secrire en developpement limite en fraction
1
n
.
Theor`eme 2.3. On suppose que b et sont deux fonctions de classe C
` a derivees bornees.
On suppose de plus que
Soit f est une fonction de classe C
` a derivees ` a croissance polyn omiales.
Soit f est une fonction mesurable bornee, et loperateur satisfait une condition dellipti-
cite :
tel que x R
d
, |(x)
(x)| > .
Alors, pour tous h =
T
n
lerreur en T secrit
Ef(X
T
) Ef
_
X
h
T
_
= C(f)h +O(h
2
).
o` u C(f) est une constante qui peut etre calculee en fonction de f (voir [6, 7] pour une
expression de C(f)).
2.3. M
ETHODES SP
ECIALES POUR LES OPTIONS EXOTIQUES 17
Nous sommes maintenant capable dappliquer lextrapolation de Romberg.
Corollaire 2.4. On suppose les memes hypoth`eses que pour le theor`eme 2.3. Soit
X
n/2
le
schema dEuler avec pas de n/2. Alors
[Ef(X
T
) 2Ef(
X
h
T
) Ef(
X
2h
T
)[ K
T
h
2
.
Ce resultat est une consequence immediate de 2.3. Le co ut numerique de cette methode est
bien plus faible que celui dun schema dordre 2 (voir [57]).
2.3 Methodes speciales pour les options exotiques
Quand le payo dune option est specie on peut construire des methodes plus ecaces.
2.3.1 Options asiatiques
Dans ce paragraphe, on suppose que le payo secrit
f
_
S
T
,
_
T
0
S
s
ds
_
,
o` u f est une fonction bornee et (S
t
, t 0) est la solution de lEDS de Black et Scholes
S
t
= xe
(r
1
2
2
)t+Wt
.
Si on veut utiliser des methodes de Monte Carlo pour calculer le prix dune de ces options,
on doit simuler la moyenne de S
t
, et donc approcher son integrale. Ici, il nest pas necessaire
dapprocher S
t
car il peut etre simule exactement aux instants kh avec h = T/N, et on
notera alors les instants t
k
= kT/N = kh. Nous introduisons trois schemas pour approcher
Y
T
=
_
T
0
S
u
du (voir [41, 58]).
Le schema standard
Comme il est facile de simuler S
t
` a linstant t, lintegrale peut etre approchee par une somme
de Rieman
Y
r,N
T
= h
N1
k=0
S
t
k
. (2.8)
Si M represente le nombre de simulation de Monte Carlo, une approximation du prix dun
call xe asiatique est donnee par
e
rT
M
M
j=1
_
h
T
N1
k=0
S
t
k
K
_
+
.
La complexite de cet algorithme est en O
_
1
NM
_
(cela est vrai quelque soit lalgorithme Monte
Carlo considere) et il comporte deux types derreurs : lerreur de simulation quantie par
lecart type et lerreur due au schema de discretisation en h.
18 CHAPITRE 2. SCH
EMAS DAPPROXIMATION DEDS
Ce schema (2.8) peut etre interprete ` a laide dune approximation dEuler de lequation
dierentielle stochastique bi-dimensionnelle suivante
dU
t
= B(U
t
)dt + (U
t
)dW
t
avec U
t
=
_
S
t
Y
t
_
, B(U
t
) =
_
rS
t
S
t
_
and (U
t
) =
_
(S
t
)
0
_
Schemas dordre superieur
Une mani`ere de construire des schemas plus precis est de remarquer que dans L
2
, la variable
aleatoire la plus proche de
_
1
T
_
T
0
S
s
ds K
_
+
, quand les (S
t
k
, k = 0, . . . , N) sont connus
est donnee par
E
__
1
T
_
T
0
S
u
du K
_
+
B
h
_
, (2.9)
o` u B
h
est la tribu engendree par les (S
t
k
, k = 0, . . . , N). Bien evidemment, il est impossible
de calculer exactement cette esperance conditionnelle (cela est plus dicile que de calculer
une formule explicite pour V ).
Mais comme la loi conditionnelle de W
u
par rapport ` a B
h
pour u [t
k
, t
k+1
] peut etre
formellement decrite, on peut calculer
_
E
_
1
T
_
T
0
S
u
du
B
h
_
K
_
+
=
_
1
T
_
T
0
E
_
S
u
B
h
_
du K
_
+
(2.10)
en tant que fonction de (W
t
k
, k = 0, . . . , N). Linegalite de Jensen prouve que (2.10) est plus
petit que (2.9), mais on va voir que (2.9) est dej` a une bonne approximation de Y
T
. Utilisant
la loi decrite par
L(W
u
[ W
t
k
= x, W
t
k+1
= y) = ^
_
t
k+1
u
h
x +
u t
k
h
y,
(t
k+1
u)(u t
k
)
h
_
, (2.11)
on obtient
E
_
1
T
_
T
0
S
u
du
B
h
_
=
1
T
N1
k=0
_
t
k+1
t
k
e
(r
2
2
)u
e
t
k+1
u
h
Wt
k
+
ut
k
h
Wt
k+1
+
2
2
(t
k+1
u)(ut
k
)
h
du
=
1
T
N1
k=0
_
t
k+1
t
k
e
ut
k
h
(Wt
k+1
Wt
k
)
2
2
(ut
k
)
2
h
+ru
e
Wt
k
2
2
t
k
du
Dans une methode de Monte Carlo, cette approximation est utilisee dans une double boucle
(en temps et en nombre de simulations). Il est necessaire de simplier cette formule, et, une
application de la formule de Taylor (avec h petit) conduit au schema dapproximation plus
simple suivant
Y
e,N
T
=
h
T
N1
k=0
S
t
k
_
1 +
rh
2
+
W
t
k+1
W
t
k
2
_
. (2.12)
2.3. M
ETHODES SP
ECIALES POUR LES OPTIONS EXOTIQUES 19
Remarque 2.6. Notons que ce schema est equivalent ` a la formule des trap`ezes. En eet
on montre que
E
_
Y
e,N
T
1
T
N1
k=0
h
S
t
k
+S
t
k+1
2
_
2
= O
_
1
N
3
_
.
Or, comme la vitesse de convergence de (2.12) est en 1/N.
Demonstration. Ce resultat peut etre obtenu en utilisant la formule de Taylor
1
T
N1
k=0
h
S
t
k
+S
t
k+1
2
=
1
T
N1
k=0
hS
t
k
2
(e
(Wt
k+1
Wt
k
)
2
2
h+rh
+ 1)
=
1
T
N1
k=0
hS
t
k
2
(2 +(W
t
k+1
W
t
k
) +rh +O(h(W
t
k+1
W
t
k
)))
ce qui est exactement le schema (2.12). Le terme dordre
2
h et la variation quadratique
(W
t
k+1
W
t
k
) sannule. Utilisant Cauchy-Schwarz on obtient le resultat voulu.
Le dernier schema est tr`es semblable. Comme le mouvement Brownien est un processus
gaussien,
_
T
0
W
u
du suit une loi normale sur R et peut etre facilement simule. Il est alors
naturel de chercher des schemas de discretisation de
_
T
0
S
s
ds faisant intervenir
_
T
0
W
s
ds. Par
exemple, on peut proceder de la mani`ere suivante :
Y
T
=
1
T
_
T
0
S
u
du
=
1
T
N1
k=0
S
t
k
_
t
k+1
t
k
e
(WuWt
k
)
2
2
(ut
k
)+r(ut
k
)
du.
En utilisant formellement la formule de Taylor, on obtient
Y
p,N
T
=
1
T
N1
k=0
S
t
k
_
h +
rh
2
2
+
_
t
k+1
t
k
(W
u
W
t
k
)du
_
. (2.13)
Remarque 2.7. En pratique pour simuler ce schema, on doit, ` a chaque etape simuler W
t
k+1
sachant W
t
k
et (
_
t
k+1
t
k
W
u
du [ W
t
k
, W
t
k+1
). Pour la seconde variable on utilise la loi (2.9) et
pour la premi`ere on remarque que (W
t
k+1
W
t
k
, k = 0, . . . , N 1) est une suite de variables
gaussiennes i.i.d.
Remarque 2.8. Ce schema est generalisable ` a une classe plus large de processus. Soit S
t
une diusion de derive b(S
t
), de derive (S
t
), et Y
t
=
_
S
t
dt. On peut utiliser un schema
classique pour approcher S
t
par S
N
t
et poser
Y
N
T
=
N1
k=0
S
n
t
k
_
h +
_
t
k+1
t
k
(S
N
s
S
N
t
k
)ds
_
.
20 CHAPITRE 2. SCH
EMAS DAPPROXIMATION DEDS
Mais si la diusion S
t
est directement simulable aux instants t
k
, il sut dutiliser
Y
N
T
=
N1
k=0
S
t
k
_
h +
_
t
k+1
t
k
(S
N
s
S
t
k
)ds
_
.
Toutefois, si lordre de convergence du schema utilise pour S nest pas meilleur que 1/N
3/2
,
cela na pas dinteret car lerreur globale sera limitee par celle du premier schema.
Convergence dans les espaces L
p
Dans tout ce qui suit on va se ramener ` a S
0
= 1. Si S
0
= s nest pas une variable aleatoire,
il sut de considerer S
t
/s (on note que si s = 0 le probl`eme pose est trivial).
Soit un schema dapproximation de Y
t
. Si on sinteresse ` a des schemas B
h
mesurables alors
on sait que lesperance conditionnelle va etre optimale dans L
2
. Le but est de comparer les
dierents schemas. On commence par rappeler deux resultats importants.
Proposition 2.5. Pour une diusion de type Black et Scholes
E[S
t
S
s
[
2q
C
q
[t s[
q
.
Cette proposition est valable pour toute diusion avec des coecients lipschitziens (cf. [52]).
Le resultat suivant est aussi tr`es utile (voir [23] chapitre 3 pour une preuve) :
Lemme 2.6. Soit Z
t
= Z
0
+
_
t
0
A
s
dW
s
+
_
t
0
B
s
ds o` u B
s
est un vecteur dans R
n
, A
s
une
matrice de R
nd
, et W
t
un mouvement Brownien ddimensionnel. (Z
t
est un processus dIt o
donc A et B sont adaptes,
_
[A
s
[ds < + and E
_
B
2
s
ds < +).
Alors, Z
t
satisfait
E[Z
t
[
p
E[Z
0
[
p
+C
_
t
0
E([Z
s
[
p
+[A
s
[
p
+[B
s
[
p
)ds
On peut maintenant obtenir des resultats precis de convergence pour nos trois schemas
Proposition 2.7. Avec les notations ci-dessus, il existe trois fonctions strictement crois-
santes K
1
(T), K
2
(T), K
3
(T) telles que,
_
E
_
sup
t[0,T]
[Y
r,N
t
Y
t
[
2q
__ 1
2q
K
1
(T)
N
, (2.14)
_
E
_
sup
t[0,T]
[Y
e,N
t
Y
t
[
2q
__ 1
2q
K
2
(T)
N
, (2.15)
_
E
_
sup
t[0,T]
[Y
p,N
t
Y
t
[
2q
__ 1
2q
K
3
(T)
N
3/2
. (2.16)
2.3. M
ETHODES SP
ECIALES POUR LES OPTIONS EXOTIQUES 21
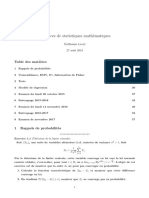
Fig. 2.1 Limites de la methode nave dapproximation
2.3.2 Options sur maximum
Introduction
On consid`ere dans cette partie des payo du type
f(X
T
, M
T
),
o` u (X
t
, t 0) est solution de lEDS en dimension 1,
dX
t
= b(X
t
)dt +(X
t
)dW
t
,
et M
T
= max
sT
X
s
.
Approche nave La methode devaluation la plus simple est de calculer le maximum sur
la trajectoire. On va approcher M
T
par
M
T
= max
0kn
X
n
kh
,
Notons que sous certaines conditions de regularite on montre que (voir [54]) lerreur secrit
comme
E(f(X
T
, M
T
)) E
_
f(
X
n
T
,
M
n
T
)
_
=
C
n
(1 +(n)),
o` u lim
n+
(n) = 0. Ce resultat est surprenant. En eet, si f ne depend pas de M
T
, on a
vu que lordre de convergence etait en h. La gure 2.3.2 montre quen fait le maximum peut
ne pas se situer en un instant de discretisation et etre meme tr`es dierent. Cependant on
peut tr`es facilement ameliorer ce resultat (voir [30, 31, 32], [1, 3, 2]).
Utilisation des ponts browniens
Lidee de base est que lon peut simuler, apr`es discretisation, la loi du maximum du processus
(
X
n
t
, 0 t T) o` u
X
n
t
=
X
n
kh
+b(
X
n
kh
)(t kh) +(
X
n
kh
)(W
t
W
kh
).
conditionnellement `a (
X
n
kh
, 0 k N). Pour cela, nous avons besoin de quelques notions sur
les ponts Browniens :
Proposition 2.8. Soit (W
t
)
t0
un mouvement Brownien. Le processus (Z
t
)
0t<T
deni par
Z
t
= W
t
t
T
W
T
est un processus gaussien independant de W
T
. De plus,
E[Z
t
] = 0 t [0, T]
E[Z
t
Z
s
] = s t
st
T
(s, t) [0, T]
2
22 CHAPITRE 2. SCH
EMAS DAPPROXIMATION DEDS
Enn, le mouvement Brownien conditionne par W
T
= y a meme loi que
Z
y
t
= W
t
t
T
(W
T
y).
Demonstration. Pour tous 0 t
1
< . . . < t
k
< T, le vecteur aleatoire (Z
t
1
, . . . , Z
t
k
, W
T
) est
gaussien centre en tant quimage dun vecteur gaussien centre par une application lineaire.
En particulier, (Z
t
)
t[0,T]
est un processus gaussien centre.
De plus,
Cov(Z
t
i
, W
T
) = E[W
t
i
W
T
]
t
i
T
E
_
W
2
T
= 0.
do` u lindependance de (Z
t
1
, . . . , Z
t
k
) et W
T
puis celle de Z
t
, t [0, T] et W
T
par un argument
de classe monotone.
On a dej` a vu que Z est centre et pour s t
E[Z
s
Z
t
] = E[W
s
W
t
]
t
T
E[W
s
W
T
]
s
T
E[W
t
W
T
] +
st
T
2
E
_
W
2
T
= s
st
T
.
Do` u en symetrisant
E[Z
s
Z
t
] = s t
st
T
.
Pour la derni`ere armation, nous renvoyons ` a [52] p.39.
Appliquons maintenant ce resultat au schema dEuler :
Proposition 2.9. On suppose que ne sannule pas pour tout x R. Alors conditionnelle-
ment ` a (
X
n
t
k
= x
k
,
X
n
t
k+1
= x
k+1
), le processus (
X
n
)
t[t
k
,t
k+1
]
a la loi de (x
k
+ (x
k
)Z
tt
k
)
o` u Z est le pont Brownien
Z
tt
k
= W
tt
k
t t
k
t
k+1
t
k
_
W
t
k+1
t
k
x
k+1
x
k
(x
k
)
_
.
Cest un processus gaussien desperance x
k
t
k+1
t
t
k+1
t
k
+x
k+1
tt
k
t
k+1
t
k
et de variance
(t t
k
)(t
k+1
t)
t
k+1
t
k
(x
k
)
2
.
Demonstration. Immediat dapr`es la proposition precedente.
Finalement il est necessaire davoir des renseignements sur la fonction de repartition du
maximum dun pont Brownien :
Proposition 2.10. Soit Z
t
= W
t
t
T
(W
T
y), le pont Brownien valant y quand t = T.
Alors, pour tout a > y,
P
_
max
t[0,h]
Z
t
a
_
= 1 e
2
h
a(ay)
.
2.3. M
ETHODES SP
ECIALES POUR LES OPTIONS EXOTIQUES 23
Demonstration. Dapr`es la proposition 2.8, Z
t
a meme loi que W
t
[ W
h
= y. Soit
a
:= inft
0 : W
t
= a , le temps datteinte de a par W. On a alors,
P
_
max
t[0,h]
W
t
a , W
h
y
_
= P(
a
h , W
h
y) = P(
a
h , W
h
W
a
y a) .
Comme
a
est T
W
a
mesurable et que W
h
W
a
est independant de T
W
a
par la propriete de
Markov forte du mouvement Brownien, on obtient
P
_
max
t[0,h]
W
t
a , W
h
b
_
= P(
a
h , W
h
W
a
a y)
= P(
a
h , W
h
2a y)
car W
h
W
a
et W
a
W
h
ont la meme loi (propriete de symetrie). Comme 2a y a, on
a donc
P
_
max
t[0,h]
W
t
a , W
h
b
_
= P(W
h
2a y) .
Finalement, comme
P
_
max
t[0,h]
W
t
a [ W
h
= y
_
= 1
y
P
_
max
t[0,h]
W
t
a , W
h
y
_
y
P(W
h
y)
,
un calcul direct donne le resultat.
En couplant les propositions 2.10 et 2.9, on saper coit que la loi du maximum du schema
dEuler entre t
k
et t
k+1
a pour fonction de repartition :
P
_
max
t
k
tt
k+1
X
n
t
a [
X
n
t
k
= x
k
,
X
n
t
k+1
= x
k+1
_
= 1 e
2
h
(ax
k
)(ax
k+1
)
2
(x
k
)
:= F
h
(a, x
k
, x
k+1
).
Son inverse etant
F
1
h
(U, x
k
, x
t
k+1
) =
1
2
_
x
k
+x
k+1
+
_
(x
k+1
x
k
)
2
2
2
(x
k
)hln(U)
_
(2.17)
On peut simuler la loi de m
k
= max
t
k
tt
k+1
X
n
t
par F
1
h
(U
k
, x
k
, x
t
k+1
) o` u les U
k
sont des
variables independantes de loi uniforme sur [0, 1] . On denit une approximation de M
T
en
utilisant
M
T
= sup
1kN
m
k
.
Ce schema est facile `a implementer :
24 CHAPITRE 2. SCH
EMAS DAPPROXIMATION DEDS
For i=1 to n
S(k+1) = S(k) * exp((r-sigma^2/2) h + sigma*sqrt(h)*gauss(k)
G en` ere U
Calcul de mk par (2.17)
end
On peut par ailleurs montrer (voir [32]) que sous certaines conditions de regularite, il est
dordre 1/n. On peut generaliser ce procede quand d > 1 en prenant le maximum sur chaque
composante de X.
2.3.3 Options barri`eres
Dans cette partie, X designera la solution de lequation dierentielle stochastique multi-
dimensionnelle :
dX
t
= b(X
t
)dt +(X
t
)dW
t
, X
0
= x R
d
.
On sinteresse `a levaluation desperance de la forme :
E[g(X
T
)1
>T
] o` u , := inft [0, T] : X
t
/ D, (2.18)
o` u D est un borelien de R
d
. represente le temps de sortie de cet ensemble, avec pour
convention inf = +.
Ces options sont en dimension 1 des cas particuliers des options sur maximum.
Approche nave
On commence par lapproche la plus simple qui consiste ` a approcher (2.18) par son equivalent
discret
E
_
1
n
>T
g(
X
n
T
)
o` u
n
:= inft
i
, i 0, . . . , n :
X
n
t
i
/ D (2.19)
est lequivalent discret de . Cette quantite est facilement simulable et on a le resultat de
convergence suivant demontre dans [32].
Theor`eme 2.11. Si D est borne de fronti`ere D de classe
1
C
3
, b et C
3
avec a strictement
uniformement elliptique
2
sur D, alors, pour toute fonction mesurable g bornee qui sannule
sur un voisinage de D, on a
E
_
1
n
>T
g(
X
n
T
)
E[1
>T
g(X
T
)] = O
_
1
n
_
.
1
i.e. pour tout y D, il existe un voisinage V (y) de y et un dieomorphisme de V (y) B R
d
tels
que
(i) (V (y) D) R
d
+
:=
_
x R
d
: x
1
0
_
(ii) (V (y) D) R
d
+
(iii) C
3
(V (y)) et
1
C
3
(B).
2
i.e. tel que x D |(x)
(x)| > .
2.3. M
ETHODES SP
ECIALES POUR LES OPTIONS EXOTIQUES 25
Il sagit dun resultat assez negatif dans la mesure o` u lon perd la vitesse de convergence
faible obtenue pour les options vanilla.
Approche par les ponts de diusion
Dans cette partie, nous presentons une autre approche qui permet dameliorer la vitesse de
convergence faible du Theor`eme 2.11. Cest lequivalent pour les options barri`eres de ce que
lon a vu au chapitre precedant pour les lookback. Cette fois-ci on approche (2.18) par
E
_
1
n
>T
g(
X
n
T
)
o` u
n
:= inft [0, T] :
X
n
t
/ D (2.20)
cest-` a-dire que lon ecrit le probl`eme sur le schema dEuler continu. On a alors le resultat de
convergence suivant demontre dans [33].
Theor`eme 2.12. Si D est un demi-espace, b et C
5
avec strictement uniformement
elliptique sur D, alors, pour toute fonction mesurable g bornee qui sannule sur un voisinage
de D, on a
E
_
1
n
>T
g(
X
n
T
)
E[1
>T
g(X
T
)] =
C
1
n
+o
_
1
n
_
.
On retrouve ainsi une vitesse de convergence faible en 1/n.
Sur les ponts de diusions An dimplementer cette approximation, on aura besoin
du resultat suivant sur la loi du schema dEuler continu conditionne. Cette proposition est
lanalogue de 2.9 en dimension d > 1.
Lemme 2.13. On suppose que (x) = ((x)
(x))
1/2
est inversible pour tout x R
d
. Alors,
conditionnellement ` a (
X
n
t
i
= x
i
,
X
n
t
i+1
= x
i+1
), le processus (
X
n
t
)
t
i
tt
i+1
a la loi de
_
x
i
+(x
i
)
W
tt
i
_
t
i
tt
i+1
conditionnellement ` a
W
t
i+1
t
i
= (x
i
)
1
(x
i+1
x
i
)
o` u
W est un mouvement brownien. Cest un processus gaussien desperance x
i
t
i+1
t
t
i+1
t
i
+
x
i+1
tt
i
t
i+1
t
i
et de matrice de variance-convariance
(st
i
)(t
i+1
t)
t
i+1
t
i
(x
i
)
2
pour tout t
i
s t
t
i+1
.
Elements de preuve. Conditionellement ` a
X
n
t
i
= x
i
, (
X
n
t
)
t
i
tt
i+1
est un processus de
diusion homog`ene qui admet pour densite de transition
p
h
(x, z) =
exp
_
1
2h
(z x b(x
i
)h)
(
2
(x
i
)) (z x b(x
i
)h)
_
_
(2h)
d
det[
2
(x
i
)]
.
Pour t
i
s t t
i+1
P
_
X
n
s
dx,
X
n
t
dy,
X
n
t
i+1
dx
i+1
[
X
n
t
i
= x
i
_
dxdydx
i+1
= p
st
i
(x
i
, x)p
ts
(x, y)p
t
i+1
t
(y, x
i+1
)
P
_
X
n
s
dx,
X
n
t
i+1
dx
i+1
[
X
n
t
i
= x
i
_
= p
st
i
(x
i
, x)p
t
i+1
s
(x, x
i+1
)dxdx
i+1
.
26 CHAPITRE 2. SCH
EMAS DAPPROXIMATION DEDS
En divisant le premier terme par le second, on obtient :
P
_
X
n
t
dy [
X
n
s
= x,
X
n
t
i
= x
i
,
X
n
t
i+1
= x
i+1
_
=
p
ts
(x, y)p
t
i+1
t
(y, x
i+1
)
p
t
i+1
s
(x, x
i+1
)
dy .
Ceci montre que
p
t
i+1
,x
i+1
t
i
,x
i
(s, x, t, y) :=
p
ts
(x, y)p
t
i+1
t
(y, x
i+1
)
p
t
i+1
s
(x, x
i+1
)
est la densite de transition du processus (
X
n
t
)
t
i
tt
i+1
conditionnellement ` a (
X
n
t
i
= x
i
,
X
n
t
i+1
=
x
i+1
). Le reste en decoule par des calculs directs.
Remarque 2.9. En utilisant la propriete de Markov de
X
n
, on verie facilement que les
processus (
X
n
t
)
t
i
tt
i+1
pour i allant de 0 ` a n 1 sont independants conditionnellement ` a
X
n
t
0
, . . . ,
X
n
tn
.
Implementation On peut maintenant decrire la methode. On commence par simuler le
schema dEuler (
X
n
t
i
)
n
i=1
et on ecrit
E
_
1
n
>T
g(
X
n
T
)
= E
_
E
_
1
n
>T
[ (
X
n
t
i
)
n
i=1
g(
X
n
T
)
ce qui signie quil faut calculer E1
n
>T
[ (
X
n
t
i
)
n
i=1
, une fois la trajectoire discr`ete (
X
n
t
i
)
n
i=1
simulee.
Evidemment si un des
X
n
t
i
nest pas dans D, il ny a rien ` a faire et le payo de
loption donne 0. On ne calcule donc cette probabilite que si les
X
n
t
i
simules sont tous dans
D.
Pour cela, on va utiliser les resultats de la section precedente. Tout dabord, la Remarque 2.9
implique que
E
_
1
n
>T
[ (
X
n
t
i
)
n
i=1
=
n1
i=0
P
_
t [t
i
, t
i+1
],
X
n
t
D [
X
n
t
i
,
X
n
t
i+1
_
.
Nous allons maintenant montrer que, dans le cas o` u D est un demi-espace, le calcul est
explicite. On ecrit D sous la forme
D = y R
d
:
(y ) > 0 (2.21)
i.e.
D est lhyperplan passant par R
d
orthogonal ` a R
d
.
Exemple 2.1. Pour une barri`ere haute U en dimension 1, on a D = (, U), ce qui donne
= U et = 1.
On xe i 0, . . . , n 1. Dapr`es la proposition 2.10, on a
P
_
t [t
i
, t
i+1
],
X
n
t
/ D [
X
n
t
i
= x
i
,
X
n
t
i+1
= x
i+1
_
= P
_
t [t
i
, t
i+1
],
(x
i
)
W
tt
i
( x
i
) [
W
t
i+1
t
i
= (x
i
)
1
(x
i+1
x
i
)
_
.
2.3. M
ETHODES SP
ECIALES POUR LES OPTIONS EXOTIQUES 27
On choisit maintenant une matrice P orthogonale
3
telle que P
1
=
1
(x
i
)
(x
i
). Le pro-
cessus
W
t
i
= (P
W
tt
i
)
t[t
i
,t
i+1
]
a la meme loi que
W. Par ailleurs
(x
i
)
W
tt
i
=
(x
i
)P
W
tt
i
= |(x
i
)|
W
1
tt
i
car le vecteur ligne
(x
i
)P
a seulement sa premi`ere composante non nulle, egale ` a |(x
i
)|.
En re-injectant ce resultat dans les egalites precedentes, on obtient
P
_
t [t
i
, t
i+1
],
X
n
t
/ D [
X
n
t
i
= x
i
,
X
n
t
i+1
= x
i+1
_
= P
_
t [t
i
, t
i+1
],
W
1
tt
i
( x
i
)
|(x
i
)|
[
W
1
t
i+1
t
i
=
(x
i+1
x
i
)
|(x
i
)|
_
= P
_
min
t[t
i
,t
i+1
]
W
1
tt
i
( x
i
)
|(x
i
)|
[
W
1
t
i+1
t
i
=
(x
i+1
x
i
)
|(x
i
)|
_
.
Cette probabilite se calcule facilement en utilisant le principe de reexion du Brownien (voir
proposition 2.10)
P
_
min
t[t
i
,t
i+1
]
W
1
tt
i
a [
W
1
t
i+1
t
i
= b
_
= e
2
n
T
a(ab)
a 0 et b a (2.22)
que lon applique `a b =
(x
i+1
x
i
)
(x
i
)
et a =
(x
i
)
(x
i
)
. Puisque lon ne fait ce calcul que si x
i
D, on verie bien que a 0 et b a. Finalement, on a montre que
Proposition 2.14. Si (x)
2
est inversible pour tout x R
d
et si D est donne par (2.21),
alors pour tout x
i
, x
i+1
D, on a
P
_
t [t
i
, t
i+1
],
X
n
t
D [
X
n
t
i
= x
i
,
X
n
t
i+1
= x
i+1
_
= 1 exp
_
2
n
T
(
( x
i
))
( x
i+1
))
|(x
i
)|
2
_
. (2.23)
Lorsque D nest pas un demi-espace, on na en general plus de forme explicite pour (2.23).
On peut toutefois essayer dapprocher D par son hyperplan tangent en
D
(x
i
), le projete
de x
i
sur la fronti`ere de D. Si D est de classe C
5
, on retrouve la vitesse en 1/n du Theor`eme
2.12, voir [33].
Exemple 2.2. On evalue un call up-and-out
E
_
1
max
t[0,T]
Xt<U
[X
T
K]
+
_
dans le mod`ele de Black-Scholes de param`etres r = 0, = 0.15, T = 1, X
0
= 100, K =
90, U = 130. Le tableau ci-dessous donne les intervalles de conance simules pour les deux
methodes (nave et par pont), le prix reel etant denviron 9.21. On eectue ` a chaque fois
30.000 simulations.
Nombre de pas de temps Methode Nave Methode par pont
10 [9.84 , 9.97] [9.18 , 9.31]
50 [9.46 , 9.60] [9.14 , 9.27]
100 [9.40 , 9.54] [9.16 , 9.30]
3
i.e. PP
= P
P = I
d
.
28 CHAPITRE 2. SCH
EMAS DAPPROXIMATION DEDS
La sur-estimation de la methode nave est agrante : il est absolument necessaire dutiliser
la methode tenant compte de la probabilite de sortie de D entre deux dates de discretisation.
Chapitre 3
Reduction de variance
Nous avons vu que lerreur due ` a une methode de Monte Carlo pour le calcul de E[f(S
T
)]
est liee soit `a la discretisation du processus S
T
soit ` a lapproximation de lesperance par une
moyenne trajectorielle. Nous avons egalement observe que dans certains cas de payo, il etait
possible de reduire considerablement lerreur de discretisation. Dans ce chapitre nous allons
nous interesser au deuxi`eme type derreur.
3.1 Fonctions dimportance
3.1.1 Un exemple en nance
Supposons que le processus S obeit ` a lequation de Black et Scholes ` a 1 dimension
dS
t
= rS
t
dt +S
t
dW
t
, (3.1)
lon et que lon veuille calculer un call :
E[(S
T
)] =
_
S
0
e
W
T
+(r
2
/2)T
K
_
+
,
avec S
0
K (call tr`es en dehors de la monnaie).
Si on eectue une methode de Monte Carlo classique, sur toutes les trajectoires simulees, tr`es
peu seront au dessus de K et donc tr`es peu compteront (car P
_
S
0
e
TG+(r
2
/2)T
> K
_
est tr`es faible). Dans ce cas on simule :
E[f(G)] f(x) =
_
S
0
e
Tx+(r
2
/2)T
K
_
+
.
Au lieu de simuler G, nous allons simuler H = G + m o` u m est reel que lon choisira
ulterieurement. La loi de H a pour densite
h(x) =
e
1
2
(xm)
2
2
.
On a
E[f(G)] = E
_
f(H)
h(G)
h(H)
_
= E
_
f(H)e
mH+
m
2
2
_
.
29
30 CHAPITRE 3. R
EDUCTION DE VARIANCE
Pour choisir un m approprie f doit etre donne. Dans le cas du call tr`es en dehors de la
monnaie, on va sarranger pour que P[S
0
e
TH+(r
2
/2)T
> K] ne soit plus negligeable. Par
exemple, on peut choisir (ce nest pas optimal) m tel que S
0
e
m
T+(r
2
/2)T
= K et donc
P[S
0
e
TH+(r
2
/2)T
> K] =
1
2
.
Application : on donne r = 0, = 0.2, T = 1, K = 100, S
0
= 70. Le vrai prix est de .248.
Methode Nombre de trajectoires Valeur Intervalle de conance
Classique 1000 0.29 [..021 , .57]
Classique 10000 0.288 [.18 , .39]
Classique 100000 0.255 [.23 , .28]
Importance 1000 0.246 [.24 , .25]
Importance 10000 0.239 [.238 , .241]
Importance 100000 0.247 [.247 , .248]
On voit bien quun Monte Carlo classique a une variance trop grande.
3.1.2 Generalites
La methode de fonction dimportance consiste ` a changer la loi de simulation dans le but de
reduire la variance.
Supposons que lon veuille calculer
E(g(X)),
Xest une variable aleatoire de densite f(x) on R, alors
E(g(X)) =
_
R
g(x)f(x)dx.
Soit
fune autre densite telle que
f(x) > 0 et
_
R
f(x)dx = 1. Alors on peut ecrire E(g(X))
comme
E(g(X)) =
_
R
g(x)f(x)
f(x)
f(x)dx = E
_
g(Y )f(Y )
f(Y )
_
,
si Y a pour densite
f(x) sous P. Nous avons obtenu une autre methode pour simuler E(g(X))
en utilisant n trajectoires selon la loi de Y , (Y
1
, . . . , Y
n
)
1
n
_
g(Y
1
)f(Y
1
)
f(Y
1
)
+ +
g(Y
n
)f(Y
n
)
f(Y
n
)
_
.
On pose Z = g(Y )f(Y )/
f(Y ), lalgorithme sera alors plus ecace si Var(Z) < Var (g(X)).
Or la variance de Z vaut
Var(Z) = E(Z
2
) E(Z)
2
=
_
R
g
2
(x)f
2
(x)
f(x)
dx E(g(X))
2
.
Si g(x) > 0, un calcul simple montre que si
f(x) = g(x)f(x)/E(g(X)) alors Var(Z) = 0 ! Bien
sur ce resultat theorique na pas dapplications pratiques car il repose sur la connaissance de
E(g(X)), qui est ce que lon veut calculer.
Neanmoins, cela fournit une approche heuristique : on choisit
f(x) comme une bonne ap-
proximation de [g(x)f(x)[. Apr`es normalisation (i.e. on divise par
_
f(x)dx) on obtient une
densite qui peut etre simple `a simuler.
3.1. FONCTIONS DIMPORTANCE 31
3.1.3 Theor`eme de Girsanov et fonctions dimportance pour les diusions
Theor`eme Suivant la methode de Newton [45], nous allons montrer que sous des hypoth`eses
peu contraignantes, la variance peut etre annulee.
Proposition 3.1. Soit Z une variable aleatoire telle que Z = (W
s
, 0 s T), E
_
Z
2
_
<
+ and P(Z ) = 1, pour un > 0.
Il existe un unique processus (H
t
, 0 t T) tel que
Z = E(Z) +
_
T
0
H
s
dW
s
.
On pose h
t
h
t
=
H
t
E(Z[T
t
)
,
Soit
L
T
= exp
_
_
T
0
h
s
dW
s
1
2
_
T
0
[h
s
[
2
ds
_
.
Alors E(L
T
) = 1 et
E(Z) =
E
_
L
1
T
Z
_
P
_
L
1
T
Z = E(Z)
_
= 1.
Remarque 3.1. Cela signie que sous
P, la variable aleatoire L
1
T
Z a une variance nulle,
i.e. quelle est constante p.s.
Demonstration. Soit
t
=
E(Z|Ft)
E(Z)
. On a
t
= 1 +
_
t
0
H
s
E(Z)
dW
s
= 1
_
t
0
s
h
s
dW
s
.
Cela implique que p.s. sous P, et sous
P
t
= exp
_
_
T
0
h
s
dW
s
1
2
_
T
0
[h
s
[
2
ds
_
= L
T
.
Mais, comme Z est une variable aleatoire T
T
-mesurable,
T
= Z/E(Z).
Bien entendu, le probl`eme reste dicile car il sagit maintenant de calculer h. Supposons
que le prix du sous-jacent peut etre modelise par une diusion X
t
. Le prix dune option
europeenne est alors :
E[e
rT
f(X
T
)].
o` u f est une fonction continue et positive et (X
t
, t 0) une diusion solution de
dX
t
= b(X
t
)dt +(X
t
)dW
t
, X
0
= x. (3.2)
Soit u la fonction denie par u(t, x) = E
x
(e
r(Tt
f(X
Tt
)) (x est le point de depart de la
diusion). Il est connu que u est solution du probl`eme EDP suivant :
_
_
_
u(T, x) = f(x), for x R
n
,
_
u
t
+Au ru
_
(t, x) = 0, for (t, x) [0, T] R
n
,
32 CHAPITRE 3. R
EDUCTION DE VARIANCE
o` u A est le generateur innitesimal de la diusion (X
t
, t 0).
Si on pose Z = e
rT
u(T, X
T
) et
H
t
= e
rt
u
x
(t, X
t
)(X
t
),
alors dapr`es la formule dIt o, on a
e
rT
u(T, X
T
) = u(0, x) +
_
t
0
H
t
dW
t
= E[Z]
_
t
0
H
t
dW
t
.
Le processus h sera alors deni par :
h
t
=
H
t
E[Z[T
t
]
=
u
x
(t, X
t
)(X
t
)
u(t, X
t
)
.
La connaissance dune approximation de u (par des methodes liees aux EDP par exemple)
permet de calculer h (voir [53] pour des approximations de u par des grandes deviations).
3.2 Variables antithetiques
Le principe de cette methode de contr ole est dutiliser des proprietes de symetrie de la loi
simulee pour reduire la variance. Dans le cas de la nance on doit souvent calculer M =
E[(G)] o` u G est une gaussienne centree. Or on sait que G =
loi
G. Donc, un estimateur de
M = E[(G)] est
M
n
=
1
2n
((G
1
) +(G
1
) +. . . +(G
n
) +(G
n
).
o` u G
1
, . . . , G
n
sont n realisations de la loi de G. Si on note M
n
=
1
n
((G
1
) + . . . + (G
n
))
lestimateur Monte Carlo classique, on obtient
Var(M
2n
) =
1
4n
2
Var
_
2n
i=1
(G
i
)
_
G
i
independantes
=
1
2n
2n
i=1
Var((G
i
))
G
i
de meme loi
=
1
2n
Var((G
1
)).
La variance de lestimateur
M est
Var(
M
2n
) =
1
4n
2
Var
_
n
i=1
((G
i
) +(G
i
))
_
G
i
independantes
=
1
4n
2
n
i=1
Var ((G
i
) +(G
i
))
G
i
de meme loi
=
1
4n
(Var((G
1
)) + Var((G
1
)) + 2 Cov((G
1
), (G
1
)))
G
1
loi
=G
1
=
1
2n
(Var((G
1
)) + Cov((G
1
), (G
1
)))
On conclut que Var(
M
2n
Var(M
2n
) si et seulement si Cov((G
1
), (G
1
)) 0. Or, on
dispose du theor`eme :
3.2. VARIABLES ANTITH
ETIQUES 33
Theor`eme 3.2. Soit G une variable aleatoire, T une transformation decroissante de R telle
que T(G)
loi
= G, et une fonction monotone alors
Cov((G), (T(G))) 0,
avec inegalite si est strictement monotone sur un domaine de mesure non nulle.
Demonstration. Nous ferons la preuve dans le cas o` u est croissante et T est decroissante
(les autres cas sobtiennent par symetrie). Soit H une variable aleatoire independante de G
et de meme loi, alors
E[(G)] E[(T(G))] =E[(G)(T(H))] = E[((G) (H))((T(H)) (T(G)))]
+E[(H)((T(H)) (T(G)))] +E[(G)(T(G))]
=E[((G) (H))((T(H)) (T(G)))]
. .
(1)
E[(H)(T(G)))] + 2E[(G)(T(G))] .
En regroupant les termes identiques de part et dautre et en decomposant (1) suivant 1
GH
on a
2E[(G)] E[(T(G))] =E[((G) (H))((T(H)) (T(G)))1
GH
]
+E[((G) (H))((T(H)) (T(G)))1
GH
]
+ 2E[(G)(T(G))]
Or comme est croissante et T decroissante on a
((G) (H))((T(H)) (T(G)))1
GH
0
et
((G) (H))((T(H)) (T(G)))1
GH
0.
Do` u
E[(G)] E[(T(G))] E[(G)(T(G))] .
Il y egalite lorsque ((G)(H))((T(H))(T(G))) est non nulle sur un ensemble de mesure
non nulle, i.e. si est strictement monotone sur un ensemble de mesure non nulle.
Un exemple en nance Considerons le cas du put dans le mod`ele de Black et Scholes.
On cherche `a calculer E[(G)] o` u (x) =
_
K e
Tx+T
_
+
et G est une variable aleatoire
gaussienne centree reduite. est croissante et la transformation T(x) = x est decroissante.
Vu le theor`eme 3.2, lestimateur
M
n
a une variance plus faible que M
2n
. En eet, en prenant
r = 0, = 0.2, T = 1, K = 100, S
0
= 100, le vrai prix est 7.96.
Methode Valeur Intervalle de conance
Classique 8.85 [1.49 , 16.21]
Antithetique 8.28 [3.26 , 16.29]
34 CHAPITRE 3. R
EDUCTION DE VARIANCE
3.3 Variables de controles
Supposons que lon cherche `a calculer E[X] o` u X est une variable aleatoire donnee. Les
methodes de variables de contr oles consistent ` a trouver une variable Y desperance nulle ou
calculable explicitement telle que :
Var(XY) Var(X).
La relation E[X] = E[X Y ] +E[Y ] permet de calculer E[X] en simulant X Y . Comme la
variance est plus faible, lestimateur sera de meilleure qualite.
3.3.1 Theorie
On peut montrer que dans le cas o` u lon cherche ` a calculer E[(X
t
, t 0)] o` u X
t
est une
diusion, une variable de contr ole parfaite existe. Ce resultat theorique na pas toujours
des applications pratiques mais il peut conduire ` a des procedures ecaces. Le theor`eme qui
permet cela est le theor`eme de representation previsible :
Theor`eme 3.3. Soit Z une variable aleatoire telle que E(Z
2
) < +. Supposons que Z est
mesurable par rapport ` a la -alg`ebre engendree par (W
s
, s T). Alors, il existe un processus
stochastique (H
t
, t T) adapte ` a (W
s
, s t), tel que E
_
_
T
0
H
2
s
ds
_
< + et
Z = E(Z) +
_
T
0
H
s
dW
s
.
On peut trouver une preuve dans ce theor`eme dans [52] ou [37].
Remarque 3.2. On peut remarquer que Z doit etre mesurable par rapport ` a la tribu en-
gendree par le mouvement Brownien.
Ce theor`eme prouve quen principe, nous sommes capables dannuler la variance de Z. Mais
le calcul explicite de H nest jamais simple, parfois plus complique que celui de E[Z]. Nous
renvoyons ` a [45] pour des approximations numeriques et des applications en nance.
Supposons que le prix du sous-jacent soit un mod`ele Markovien X
t
et que le payo soit une
fonction de cette diusion au temps T. Alors le processus (H
t
, t T) peut secrire comme
H
t
= v(t, X
t
), v etant une fonction de t et x :
Theor`eme 3.4. Soit b et deux fonctions lipschitziennes. Soit (X
t
, t 0) lunique solution
de
dX
t
= b(X
t
)dt +(X
t
)dW
t
, X
0
= x.
On note A le generateur innitesimal de cette diusion
Af(x) =
1
2
n
i,j=1
a
ij
(x)
2
f
x
i
x
j
(x) +
n
j=1
b
j
(x)
f
x
j
(x),
o` u a
ij
(x) =
p
k=1
ik
(x)
jk
(x).
3.3. VARIABLES DE CONTR
OLES 35
Supposons que u est une fonction C
1,2
avec des derivees bornees en x et quelle est solution
de lEDP :
_
_
_
_
u
t
+Au
_
(t, x) = f(x), (t, x) [0, T] R
n
,
u(T, x) = g(x), x R
n
.
(3.3)
Alors si Z = g(X
T
)
_
T
0
f(X
s
)ds et Y =
_
T
0
u
x
(s, X
s
)(s, X
s
)dW
s
, on a
E(Z) = Z Y.
Cela signie que la variable aleatoire Y est un contr ole parfait de Z.
Demonstration. Gr ace `a la formule dIt o, on a
du(t, X
t
) =
_
u
t
+Au
_
(t, X
t
)dt +
u
x
(t, X
t
)(s, X
s
)dW
t
.
Maintenant, en integrant entre 0 et T, en prenant lesperance et en utilisant le fait que u soit
solution de 3.3, on obtient
u(0, x) = Z Y = E(Z).
Remarque 3.3.
Evidemment, si lon pouvait calculer une approximation susamment ne
de la solution de 3.3, on naurait pas besoin dutiliser de methode de Monte-Carlo. Toutefois,
on peut se restreindre ` a une resolution grossi`ere de 3.3 qui soit susante pour etre utilisee
dans la methode de reduction de variance. On peut egalement approcher le gradient par celui
correspondant ` a un payo/mod`ele proche pour lequel on a une formule explicite. Par exemple,
dans un mod`ele ` a volatilite stochastique, on peut approcher le delta en t
i
par le delta de Black-
Scholes correspondant ` a la valeur de la volatilite en t
i
.
Remarque 3.4. Cette approche par EDP setend aux options asiatiques, lookback ou ` a
barri`ere. Le cas des options asiatiques est traite simplement en augmentant la taille du pro-
cessus X, le resultat est similaire ` a celui du Theor`eme 1.3 pour le processus augmente, voir
egalement [40] Proposition 5.2.11. On pourra consulter [54] pour les options lookback et [33]
pour les options ` a barri`ere.
3.3.2 Exemples
Exemple 3.1. Parite Call/Put On suppose que (S
t
, t 0) suit une diusion log-normale
dS
t
= S
t
(rdt +dW
t
) , S
0
= x.
On note C le prix du Call Europeen
C = E
_
e
rT
(S
T
K)
+
_
,
et P le prix du Put Europeen
P = E
_
e
rT
(K S
T
)
+
_
.
36 CHAPITRE 3. R
EDUCTION DE VARIANCE
Il existe une relation qui lie le prix du Call et du Put et qui ne depend pas du mod`ele. Cette
relation peut setablir par des strategies darbitrage :
C P = E
_
e
rT
(S
T
K)
_
= x Ke
rT
.
Cette formule peut egalement etre utilisee pour reduire la variance :
C = E
_
e
rT
(K S
T
)
+
_
+x Ke
rT
.
Le calcul du Call est alors deduit du calcul du Put. Or la fonction de Payo du Put etant
bornee, on peut sattendre `a une variance plus faible.
Exemple 3.2. Methode de Kemna-Vorst [38] pour les options asiatiques.
On suppose que (S
t
, t 0) suit une diusion log-normale
dS
t
= S
t
(rdt +dW
t
) , S
0
= x.
On cherche `a calculer le prix dune option asiatique de payo
_
1
T
_
T
0
S
u
du K
_
+
.
On peut simuler le processus moyenne de S
T
en utilisant lun des schemas vus dans le premier
chapitre (2.8, 2.12,2.13).
Pour accrotre lecacite des simulations, une technique de reduction de variance peut etre
utilisee. Nous suivons ici la methode de Kemna et Vorst [38]. Cela consiste ` a approcher
1
T
_
T
0
S
u
du par exp
_
1
T
_
T
0
log(S
u
)du
_
. On peut sattendre ` a ce que ces deux variables ale-
atoires soient proches quand r et sont faibles.
La variable aleatoire Z
=
1
T
_
T
0
log(S
u
)du suit visiblement une loi normale
Z
^(T(r/2
2
/4),
3
T/3).
On peut donc calculer explicitement
E(e
rT
(exp(Z
) K)
+
).
En consequence, on choisit la variable Z denie par
Z = e
rT
(xe
(r
2
2
)
T
2
+
T
_
T
0
Wudu
K)
+
,
comme notre variable de contr ole.
Il faut remarquer que la variable de contr ole doit etre calculee avec le chemin du mouvement
Brownien dej` a simule. En consequence, chaque variable de contr ole doit etre adaptee au
schema pour laquelle elle est utilisee. On va donc eectuer la meme approximation pour
_
T
0
W
u
du que pour
_
T
0
S
u
du
Pour (2.8) Z
r,N
T
= e
rT
(xe
(r
2
2
)
T
2
+
T
N1
k=0
hWt
k
K)
+
Pour (2.12) Z
e,n
T
= e
rT
(xe
(r
2
2
)
T
2
+
T
N1
k=0
h
2
(Wt
k
+Wt
k+1
)
K)
+
Pour (2.13) Z
p,N
T
= e
rT
(xe
(r
2
2
)
T
2
+
T
N1
k=0
_ t
k+1
t
k
Wudu
K)
+
3.3. VARIABLES DE CONTR
OLES 37
On teste cette methode pour evaluer un call asiatique de param`etres r = 0.1, = 0.2, T = 1,
X
0
= K = 100. On utilise la discretisation par trap`ezes 2.12 pour approcher
_
T
0
X
t
dt avec n
= 50. La formule de Black-Scholes permet de calculer e
rT
Eg(Z
T
) = 6.77 et on prend pour
variable de contr ole
Y = e
rT
_
Eg(Z
T
)
_
e
(r
2
/2)
T
2
+
2n
n1
i=0
(Wt
i
+Wt
i+1
)
K
_
+
_
.
Le tableau ci-dessous donne les intervalles de conance simules avec et sans cette variable de
contr ole, le prix reel etant denviron 7.04.
Nombre de simulations Avec Sans
10 000 [7.034 , 7.049] [6.957 , 7.296]
20 000 [7.034 , 7.046] [6.970 , 7.207]
50 000 [7.039 , 7.045] [6.974 , 7.124]
100 000 [7.037 , 7.042] [6.980 , 7.086]
Exemple 3.3. Options sur Panier
Une idee similaire peut etre utilisee pour les options sur paniers. On suppose que pour i =
1, . . . , d
S
i
T
= x
i
e
rT+
p
j=1
ij
W
j
T
,
o` u W
1
, . . . , W
p
sont des mouvements Browniens independants. Soit a
i
, 1 i p des reels
strictement positifs veriant a
1
+ +a
d
= 1. Le but ici est de calculer un Put sur panier :
E((K X)
+
) ,
o` u X = a
1
S
1
T
+ +a
d
S
d
T
. Lidee est dapprocher
X
m
=
a
1
x
1
m
e
rT+
p
j=1
1j
W
j
T
+ +
a
d
x
d
m
e
rT+
p
j=1
dj
W
j
T
o` u m = a
1
x
1
+ +a
d
x
d
, par
Y
m
et Y est une variable aleatoire log-normale denie par
Y = me
d
i=1
a
i
x
i
m
(rT+
p
j=1
ij
W
j
T
)
.
Comme Y suit une loi log-normale, par analogie avec la formule de Black et Scholes, on sait
calculer
E
_
(K Y )
+
.
Lutilisation de Z = (K Y )
+
comme variable de contr ole et la simulation de (K X )
+
(K Y )
+
fournissent un algorithme ecace.
38 CHAPITRE 3. R
EDUCTION DE VARIANCE
3.3.3 Valeur moyenne et conditionnement
Cette methode utilise le fait que le conditionnement reduit la variance. Soit Z une variable
aleatoire de carre integrable, on a
E(Z) = E(E(Z[Y )),
o` u Y est nimporte quelle variable aleatoire construite sur le meme espace de probabilite. Il
est connu que E(Z[Y ) peut secrire comme
E(Z[Y ) = (Y ).
De plus, on a E(Z) = E((Y )) et comme lesperance conditionnelle est une projection L
2
,
E
_
(Y )
2
_
E(Z
2
),
donc Var((Y)) Var(Z).
Bien sur, lecacite de la methode repose sur la connaissance de la fonction . Cela est clair
lorsque Z = f(X, Y ), o` u X et Y sont des variables independantes. Dans ce cas,
E(f(X, Y )[Y ) = (Y ),
o` u (y) = E(f(X, y)).
Exemple 3.4. Mod`ele ` a volatilite stochastique
Soit (W
t
, t 0) un mouvement Brownien. On suppose que (S
t
, t 0) suit un mod`ele ` a
volatilite stochastique deni par
dS
t
= S
t
_
rdt +
t
dW
1
t
_
, S
0
= x,
o` u (
t
, t 0) est un processus stochastique independant de (W
t
, t 0). Nous voulons calculer,
en utilisant des techniques de Monte Carlo
E
_
e
rT
f(S
T
)
_
,
o` u f est une fonction de payo. Clairement S
T
sexprime comme
S
T
= xexp
_
rT
_
T
0
2
t
/2dt +
_
T
0
t
dW
1
t
_
.
Mais, comme les processus (
t
, t 0) et (W
t
, t 0) sont independants,
_
T
0
t
dW
t
est egal en loi ` a
1
T
_
T
0
2
t
dt W
T
.
En conditionnant par rapport au processus on obtient
E
_
e
rT
f(S
T
)
_
= E((
t
, 0 t T)) ,
3.3. VARIABLES DE CONTR
OLES 39
o` u pour une trajectoire de volatilite xee (v
t
, 0 t T)
(v
t
, 0 t T) = E
_
e
rT
f
_
xe
rT
_
T
0
v
2
t
2
dt+
_
1
T
_
T
0
v
2
t
dtW
T
__
=
_
_
1
T
_
T
0
v
2
t
dt
_
_
.
Or () est donne par la formule de Black Scholes
() = E
_
e
rT
f
_
xexp
__
r
2
2
_
T +W
T
___
.
Ainsi quand f est le payo du call ou du Put, il peut sexprimer directement en utilisant les
resultats de Black Scholes.
40 CHAPITRE 3. R
EDUCTION DE VARIANCE
Chapitre 4
Calcul des sensibilites
Les sensibilites ou variations du portefeuille par rapport aux param`etres sont importantes
en nance. En eet, ce sont ces calculs qui vont permettre au vendeur dune option de se
couvrir. Par ailleurs, nous avons vu que la connaissance du delta permettait de mettre en
oeuvre des techniques de reduction de variance.
4.1 Rappels sur les sensibilites
Soit X
T
un actif sous jacent uni-dimensionnel solution de
dX
t
= rX
t
dt +(t, X
t
)dW
t
,
o` u est une fonction. On suppose que lon cherche ` a calculer les sensibilites dune option de
payo g(X
t
, 0 t T) par Monte Carlo. Si X
0
= x, on note u(t, x) = E[g(X
s
, 0 s T)].
Les sensibilites que nous allons abordees ici sont :
=
x
E
_
e
rT
g(X
s
, 0 s T)
=
2
x
2
E
_
e
rT
g(X
s
, 0 s T)
1 =
E
_
e
rT
g(X
()+
()
s
, 0 s T)
_
Le est la couverture. Il represente la quantite dactif risque que lon doit detenir pour
repliquer loption. Le est la derivee du et doit rester faible sinon cela signie que le
nombre dinterventions sera trop eleve.
Le 1 (Vega) est la derive par rapport ` a la volatilite. La volatilite est le seul param`etre dicile
`a evaluer. Des methodes de calibration sont necessaires. Connatre la sensibilite du prix par
rapport `a permet de jauger la abilite de son prix par rapport au processus de calibration.
Il existe dautres sensibilites que nous aborderons peu ou pas dans ce chapitre :
=
T
E
_
e
rT
g(X
s
, 0 s T)
=
r
E
_
e
rT
g(X
s
, 0 s T)
41
42 CHAPITRE 4. CALCUL DES SENSIBILIT
ES
4.2 Approche par dierences nies
Lapproche la plus simple pour calculer les Grecques (sensibilites) est de voir que, par exemple,
=
u
x
(0, x). Donc, une methode simple dapproximation sera :
=
u
x
(0, x)
1
2
(u(0, x +) u(0, x +)) =
=
2
u
x
2
(0, x)
1
2
_
(0, x +)
(0, x +)
_
=
Pour le 1, la methode est la meme. On gen`ere une premi`ere trajectoire avec +, une autre
avec et on calcule le taux daccroissement.
Il existe deux possibilites de simulation de ces accroissements :
1. On utilise M simulations pour estimer une approximation u(0, x + ) de u(0, x + ) et
M autres (independantes) pour estimer u(0, x +) approximation de u(0, x ). Dans
ce cas, on a :
Var
_
u(0, x +) u(0, x )
2
_
=
1
4
2
(Var( u(0, x +)) + Var( u(0, x )))
1
4
2
_
Var(g(X
x
T
))
N
+
Var(g(X
x
T
))
N
_
=
1
2N
2
Var(g(X
x
T
)) .
2. On simule N trajectoires du Brownien et on construit X
x+
et X
x
avec les memes
trajectoires. Dans ce cas
Var
_
u(0, x +) u(0, x )
2
_
=
1
N
Var
_
g(X
x+
T
) g(X
x
T
)
2
_
1
N
Var(g
(X
x
T
)) .
Si est petit et g reguli`ere, la seconde methode sera en general preferable ` a la premi`ere.
Cette methode est tr`es simple `a mettre en oeuvre mais le choix du nest pas evident. Si
est trop petit, la variance de lestimateur peut etre tr`es grande, cest le cas si le payo est
tr`es irregulier. Si est trop grand, lapproximation des derivees est mauvaise. Les vitesses de
convergence de ces methodes ont ete etudiees par [27], [28] et [42].
4.3 Amelioration des techniques pour Monte Carlo
4.3.1 Notion de processus tangent
Nous nous pla cons dans un cadre general. Soit X
t
une diusion d-dimensionnelle solution de
lequation
dX
t
= b(X
t
)dt +(X
t
)dW
t
, X
0
= x,
o` u W est un Brownien r dimensionnel, b : R
d
R
d
et : R
d
R
dr
. On etudie la fonction
qui `a x X
t
(x), `a xe.
4.3. AM
ELIORATION DES TECHNIQUES POUR MONTE CARLO 43
Theor`eme 4.1. Si b et sont deux fonctions (
b
, alors lapplication x X
t
(x) est presque
s urement (
et lequation dIt o satisfaite par
X
i
t
(x)
x
j
sobtient par dierentiation sous les
integrales :
X
i
t
(x)
x
j
=
d
k=1
_
T
0
b
i
x
k
(X
s
)
X
k
s
(x)
x
j
ds +
d
k=1
r
l=1
_
T
0
i,l
x
k
(X
s
)
X
k
s
(x)
x
j
dW
l
s
.
que lon peut ecrire :
X
t
(x) =
_
T
0
b(X
s
(x)) X
s
(x)ds +
r
l=1
_
T
0
l
(X
s
(x)) X
s
(x)dW
l
s
,
o` u
l
est la l
`eme
colonne de .
Remarque 4.1. On peut dierentier le processus X indeniment par rapport ` a x, d`es que
les fonctions b et sont assez reguli`eres.
Denition 4.1. Le processus tangent (Y
t
)
t0
est le processus (matriciel) derivee premi`ere de
( X
t
(x) )
t0
par rapport ` a x
Y
t
=
X
t
(x)
x
.
En dimension 1, il satisfait lequation dierentielle stochastique :
X
t
= x +
_
T
0
b(X
s
)ds +
_
T
0
(X
s
)dW
s
(4.1)
Y
t
= 1 +
_
T
0
b
(X
s
)Y
s
ds +
_
T
0
(X
s
)Y
s
dW
s
(4.2)
Remarque 4.2. En dimension 1, lequation dont le processus tangent est solution a une
forme explicite :
Y
t
= exp
_
_
T
0
_
b
(X
s
)
2
2
(X
s
)
_
ds +
_
T
0
(X
s
)dW
s
_
.
Demonstration. On consid`ere tout dabord
Z
t
= log
_
exp
_
_
T
0
_
b
(X
s
)
2
2
(X
s
)
_
ds +
_
T
0
(X
s
)dW
s
__
=
_
t
0
_
b
(X
s
)
2
2
(X
s
)
_
ds +
_
T
0
(X
s
)dW
s
Donc dZ
t
=
_
b
(X
t
)
2
2
(X
t
)
_
dt +
(X
t
)dW
t
. De plus, en appliquant la formule dIt o ` a
log(Y
t
), on a
d(log(Y
t
)) =
dY
t
Y
t
1
2Y
2
t
dY, Y )
t
=
_
t
0
b
(X
s
)ds +
_
T
0
(X
s
)dW
s
_
t
0
2
2
(X
s
)ds = dZ
t
Comme Z
0
= 0 = log(Y
0
) on conclut que Y
t
= exp(Z
t
).
44 CHAPITRE 4. CALCUL DES SENSIBILIT
ES
Remarque 4.3. On peut remarquer quen dimension
x
X
t
(x) est une fonction positive et
donc que X
t
(x) est une fonction croissante en x.
Exemple 4.1. On consid`ere le mod`ele de Black et Scholes, i.e. b(x) = rx et (x) = x.
Alors on sait que
X
t
= xexp
_
(r
2
/2)t +W
t
_
.
On voit alors clairement que
Y
t
=
x
X
t
(x) = exp
_
(r
2
/2)t +W
t
_
=
X
t
(x)
x
.
Exemple 4.2. On consid`ere le processus dOrstein-Ulhenbeck, i.e. b(x) = cx et (x) = .
Alors on sait que
X
t
= xe
ct
+
_
t
0
e
c(ts)
dW
s
.
On voit alors clairement que
Y
t
=
x
X
t
(x) = e
ct
dY
t
= cY
t
dt.
Remarque 4.4. On peut egalement denir le processus derive,
X
n
t
(x)
x
, du schema dEuler
X
n
t
(x) de X
t
(x). Il est obtenu par recurrence
X
n
0
(x)
x
= 1
X
n
t
i
(x)
x
=
X
n
t
i1
(x)
x
+b
(
X
n
t
i1
(x))
X
n
t
i1
(x)
x
dt
+
(
X
n
t
i1
(x))
X
n
t
i1
(x)
x
(W
t
i
W
t
i1
) (4.3)
Lequation 4.1 peut etre vue comme limite de 4.3 quand le pas de temps tend vers 0,
X
n
t
(x)
x
concide avec le schema dEuler de
Xt(x)
x
.
Pour des developpements plus approfondis sur ces notions, nous renvoyons ` a [51].
4.3.2 Applications aux calculs de couverture
Les applications se font essentiellement gr ace ` a la proposition suivante :
Proposition 4.2. Soit g une fonction (
1
b
, et X
t
une diusion veriant les hypoth`eses du
theor`eme 4.1. Alors,
x
E[g(X
T
)] = E
_
g
(X
T
)
X
t
(x)
x
_
.
La demonstration utilise le theor`eme de Lebesgue.
Muni de cet outil pour deriver sous lesperance, on peut maintenant calculer les sensibilites.
Dans la suite, nous supposons que X
T
suit le mod`ele de Black et Scholes (i.e. b(x) = rx et
(x) = x).
Lidee generale est decrire les sensibilites sous la forme E[e
rT
g(X
T
)Z
T
] o` u Z
T
est une
variable aleatoire que lon determinera.
4.3. AM
ELIORATION DES TECHNIQUES POUR MONTE CARLO 45
Proposition 4.3. Lorsque X
t
suit le mod`ele de Black Scholes, pour toute fonction g (
1
b
on a
= E
_
e
rT
g(X
T
)
W
T
xT
_
= E
_
e
rT
g
(X
T
)
X
T
x
_
La premi`ere equation sobtient sans hypoth`eses sur g.
Demonstration. La deuxi`eme equation sobtient immediatement ` a partir de la proposition
4.2 et du fait que dans le mod`ele de Black Scholes, X
t
/x = Y
t
.
La premi`ere equation va utiliser un calcul direct. Pour eviter de deriver la fonction nous allons
utiliser une integration par parties contre la loi du Brownien.
On note p
x
(z) la densite de la loi de X
T
. Cette fonction est reguli`ere par rapport ` a x. De
plus, on a
E
_
e
rT
g(X
T
(x))
_
= e
rT
_
g(z)p
x
(z)dz,
On derive maintenant sous lintegrale (theor`eme de Lebesgue)
H = e
rT
_
g(z)
p
x
(z)
x
dz = E
_
e
rT
g(X
T
(x))
px(X
T
(x))
x
p
x
(X
T
(x))
_
,
ou
H = E
_
e
rT
g(X
T
(x))
log(p
x
)
x
(X
T
(x))
_
.
Dans le cas de Black Scholes, la densite de la loi de X
T
est donnee par
p
x
(z) =
1
z
2
2
T
exp
1
2
2
T
_
log
_
z
x
_
_
r
1
2
2
_
T
_
2
.
Ainsi,
log(p
x
)
x
(z) =
1
x
2
T
_
log
_
z
x
_
_
r
1
2
2
_
T
_
,
et donc,
log(p
x
)
x
(X
T
(x)) =
W
T
xT
.
On conclut que
= E
_
e
rT
g(X
T
(x))
W
T
xT
_
.
On peut egalement trouver des resultats pour le et le 1.
46 CHAPITRE 4. CALCUL DES SENSIBILIT
ES
Proposition 4.4. Lorsque X
t
suit le mod`ele de Black Scholes, pour toute fonction g (
1
b
on a
= E
_
e
rT
_
g
(X
T
)
W
T
X
T
x
2
T
g(X
T
)
W
T
x
2
T
__
(4.4)
= E
_
e
rT
g(X
T
)
x
2
T
_
W
2
T
T
W
T
1
__
(4.5)
1 = E
_
e
rT
g
(X
T
)X
T
(W
T
T)
(4.6)
1 = E
_
e
rT
g(X
T
)
_
W
2
T
T
W
T
1
__
(4.7)
Les egalites (4.5) et (4.7) sont valables sans hypoth`eses de regularite sur g (borelienne bornee).
La demonstration est laissee en exercice.
Exemple 4.3. On utilise le resultat de (4.5) pour estimer
2
x
2
E1
{X
x
T
[a,b]}
.
On prend comme param`etres x = 1, = 0.25, r = 0, a = 0.95 et b = 1.05. On donne les
intervalles de conance obtenus par lapproche par dierences nies avec dierentes valeurs
de et par (4.5). On fait ` a chaque fois 50.000 simulations. La valeur exacte est denviron
2.53.
Methode Intervalle estime
Par (4.5) [2.61 , 2.51]
Di. nies = 0.5 [0.32 , 0.31]
Di. nies = 0.1 [2.47 , 2.06]
Di. nies = 0.05 [3.34 , 1.68]
Di. nies = 0.005 [20.31 , 23.91]
On observe que le resultat est extremement biaise pour = 0.5 et = 0.1. Pour = 0.005,
il est trop volatil. Meme pour = 0.05, le resultat est bien moins precis que celui obtenu par
(4.5).
4.4 Calcul de Malliavin
Les deux derniers resultats donnent une representation precieuse du gradient, puisquelle
fournissent des estimateurs de Monte-Carlo tr`es naturels.
Evidemment, elles sont utiles ` a des
ns de couverture mais peuvent egalement etre employees dans le cadre des techniques de
reduction de variance presentees dans le Chapitre 3. Toutefois, ces formulations imposent
la derivabilite du payo (au moins dans un sens faible) et surtout la connaissance de cette
derivee. Ceci nest pas si evident. Si lon veut calculer le delta dun portefeuille doptions, on ne
connat pas forcement dans le detail la forme exacte de tout les payos (ils sont generalement
fournis par un ordinateur qui agit comme une bote noire). Dans la Proposition 4.3, on a vu
que, dans le cadre particulier du mod`ele de Black-Scholes, on pouvait obtenir une formulation
ne faisant pas intervenir le gradient de g. Pour cela, on avait utilise une idee dintegration par
parties par rapport `a la densite gaussienne. Dans cette section, on va introduire une notion
4.4. CALCUL DE MALLIAVIN 47
de calcul dierentiel par rapport ` a la trajectoire du mouvement Brownien, et une formule
dintegration par parties associee. Nous renvoyons ` a [46], [35] et [47] pour une presentation
compl`ete du calcul de Malliavin.
Dans cette partie pour X
t
une diusion ddimensionnelle satisfaisant
dX
t
= b(X
t
)dt +(X
t
)dW
t
X
0
= x
o` u W est un mouvement Brownien sur R
d
. Si n est le nombre de discretisation, on a h = T/n
et on note
X
n
t
k
(x), k = 0, . . . , n son schema dEuler.
4.4.1 Introduction au calcul de Malliavin
Denition 4.2. On dira quune variable aleatoire F de L
2
est simple sil existe un entier
k
F
, une suite 0 s
F
1
. . . < s
F
k
F
T et une fonction
F
de (R
d
)
k
F
dans R, continue, C
1
par
morceaux, tels que :
F =
F
_
W
s
F
1
, . . . , W
s
F
k
F
_
avec
k
F
j=1
F
(W) 1
[t,T]
(s
F
j
) L
2
pour tout t [0, T] .
On note o lespace de telles fonctions.
Bien quil soit deni sur un espace beaucoup plus gros que o, voir [46] et [48], on nintroduira
ici le calcul de Malliavin que pour des fonctions simples. Il y a trois raisons ` a cela :
1. En general, si on sait simuler parfaitement F, cest que F o.
2. Cest beaucoup plus simple, et nous pourrons mener les preuves jusquau bout.
3. Discretiser des formules obtenues en travaillant sur X ou travailler directement sur le
probl`eme discretise associe ` a
X
n
revient generalement au meme. On ne perd donc rien
en se pla cant tout de suite dans un cadre plus simple ` a gerer.
Denition 4.3. Soit F o, pour tout t [0, T], on denit
D
t
F := lim
0
F
_
W +1
[t,T]
_
F
(W)
=
k
F
j=1
F
(W) 1
[t,T]
(s
F
j
) P-p.s.
Cette denition peut etre comprise comme ceci : on choque leg`erement la trajectoire du
Brownien W en la rempla cant par une trajectoire W
1
[t,T]
= W + 1
[t,T]
, i.e. on shifte le
Brownien de apr`es t. On regarde ensuite limpact de ce choc sur F.
On appelle DF le processus derivee de Malliavin.
Exemple 4.4. On xe s, t [0, T].
1. s est independant de W et donc D
t
s = 0.
2. Si F = W
s
on a
D
t
F = lim
0
W
s
+1
[t,T]
(s) W
s
= 1
[t,T]
(s) .
48 CHAPITRE 4. CALCUL DES SENSIBILIT
ES
3. Dans le mod`ele de Black-Scholes , on a simplement
D
t
xe
(r
2
/2)s+Ws
= xe
(r
2
/2)s+Ws
1
[t,T]
(s) .
Remarque 4.5. D
t
F nest en general pas adapte, voir lexemple 3 ci-dessus.
Les proprietes suivantes decoulent immediatement de la denition.
Proposition 4.5. Soient F et G o et C
1
p
. Alors,
(i) FG et (F) o,
(ii) D(F) =
(F)DF,
(iii) D(FG) = (DF)G+F(DG).
Remarque 4.6. Si b et C
1
b
, alors
X
x,n
t
k
est une fonction deterministe de (W
t
j
, 0 j k),
et
X
x,n
t
k
o. Sa derivee de Malliavin en t peut etre calculee recursivement. Cest une matrice
de taille d d.
(D
t
X
n
t
k
(x))
i,i
= 0 si t
k
< t
(D
t
X
n
t
k
(x))
i,i
=
i,i
(
X
n
t
k1
(x)) si t
k1
< t t
k
(4.8)
(D
t
X
n
t
k
(x))
i,i
= (D
t
X
n
t
k1
(x))
i,i
i
b
i
x
i
(
X
n
t
i1
(x))(D
t
X
n
t
k1
(x))
i,i
h
+
j,i
i,j
x
i
(
X
n
t
k1
(x))(D
t
X
n
t
k1
(x))
i,i
(W
j
t
k
W
j
t
k1
) si t < t
k1
.
Plus simplement, en dimension 1 :
(D
t
X
n
t
k
(x)) = 0 si t
k
< t
(D
t
X
n
t
k
(x)) = (
X
n
t
k1
(x)) si t
k1
< t t
k
(D
t
X
n
t
k
(x)) = (D
t
X
n
t
k1
(x)) +b
(
X
n
t
i1
(x))(D
t
X
n
t
k1
(x))h
+
(
X
n
t
k1
(x))(D
t
X
n
t
k1
(x))(W
t
k
W
t
k1
) si t < t
k1
.
Remarque 4.7. On peut observer que le gradient et la derivee de Malliavin en t de
X
n
suivent la meme equation, voir remarque 4.4, ` a la condition en
n
t
= max t
i
, i = 0 . . . n ,
tel que t
i
< t pr`es
D
t
X
x,n
n
t
= 0 ,=
x
X
x,n
n
t
.
Si (x) est inversible pour tout x R
d
, un calcul direct montre que
x
X
x,n
t
i
= D
t
X
x,n
t
i
(
X
x,n
n
t
)
1
x
X
x,n
n,+
t
pour tout t t
i
T .
o` u
n,+
t
= maxt
i
, i = 0 . . . n, tel que t
i
t
Linteret de cette notion reside dans le fait que la strategie de couverture dune option peut
secrire en fonction de la derivee de Malliavin du payo.
4.4. CALCUL DE MALLIAVIN 49
Theor`eme 4.6. (Formule de Clark-Ocone) Soit F o, alors
F = EF +
_
T
0
E[D
t
F [ T
t
] dW
t
.
Demonstration. Pour simplier, on se place dans le cas o` u d = 1. On suppose egalement que
F
C
2
b
. Le cas general est obtenu par densite. A s
F
i1
< t s
F
i
xe, E[F [ T
t
] est une
fonction (t, W
t
, (W
s
F
j
)
ji1
). On note
sa derivee par rapport au deuxi`eme argument. On
a alors pour s
F
i1
< t s
F
i
(t, w, z) = lim
0
E
_
F
_
z,
i
+w +, . . . ,
n
+w +
_
F
_
z,
i
+w, . . . ,
n
+w
_
o` u est une variable aleatoire ` a valeurs dans R
ni+1
distribuee selon une loi normale ^(0, )
avec
lk
= mins
F
l
t , s
F
k
t .
On a donc par convergence dominee
(t, w, z) = E
_
_
k
F
j=i
F
_
z,
i
+w, . . . ,
n
+w
_
_
_
do` u pour t (s
F
i1
, s
F
i
]
_
t, W
t
, (W
s
F
j
)
ji1
_
= E
_
_
k
F
j=i
F
(W) [ T
t
_
_
= E
_
D
t
F
(W) [ T
t
.
Comme
F
C
2
b
, on peut verier par des arguments similaires que est C
1,2
b
par rapport ` a ces
deux premiers arguments. En appliquant le Lemme dIt o ` a la martingale (t, W
t
, (W
s
F
j
)
ji1
)
sur (s
F
i1
, s
F
i
], on obtient alors
E
_
F [ T
s
F
i
_
= E
_
F [ T
s
F
i1
_
+
_
s
F
i
s
F
i1
_
t, W
t
, (W
s
F
j
)
ji1
_
dW
t
= E
_
F [ T
s
F
i1
_
+
_
s
F
i
s
F
i1
E
_
D
t
F
(W) [ T
t
dW
t
.
Cette relation etant veriee pour tout i 1, . . . , k, en sommant le syst`eme dequations
obtenues, on en deduit que
F = E
_
F [ T
s
F
k
_
= E[F [ T
0
] +
_
s
F
k
0
E
_
D
t
F
(W) [ T
t
dW
t
.
= E[F] +
_
T
0
E
_
D
t
F
(W) [ T
t
dW
t
.
50 CHAPITRE 4. CALCUL DES SENSIBILIT
ES
Theor`eme 4.7. (Formule dintegration par parties) Soit F o et soit un processus
adapte h L
2
([0, T] , dt dP), alors
E
_
F
_
T
0
h
t
dW
t
_
= E
__
T
0
D
t
Fh
t
dt
_
.
Demonstration. On pose X
t
= E[F [ T
t
] et H
t
=
_
t
0
h
s
dW
s
. On remarque que H
0
= 0. Dapr`es
le Theor`eme 4.6, on a donc par le Lemme dIt o :
F
_
T
0
h
t
dW
t
= X
T
H
T
=
_
T
0
(X
t
h
t
+H
t
E[D
t
F [ T
t
]) dW
t
+
_
T
0
E[D
t
F [ T
t
] h
t
dt .
On obtient donc
E
_
F
_
T
0
h
t
dW
t
_
= E
__
T
0
E[D
t
F [ T
t
] h
t
dt
_
= E
__
T
0
D
t
Fh
t
dt
_
o` u lon a utilise le Lemme de Fubini et le fait que h est adapte.
Remarque 4.8. Le Theor`eme 4.7 reste vrai, dans une certaine mesure, meme si h nest pas
adapte. Dans ce cas, lintegrale
_
T
0
h
t
dW
t
est denie en tant quintegrale de Skorohod, voir
[46]. Lorsque h = Fu o` u F est une variable aleatoire T
T
-mesurable et u est un processus
adapte, on obtient, sous certaines hypoth`eses de regularite et dintegrabilite, un lien entre
lintegrale dIt o et de Skorohod :
_
T
0
Fu
t
dW
t
= F
_
T
0
u
t
dW
t
_
T
0
D
t
Fu
t
dt .
Ces resultats setendent au diusion, en particulier le lien entre derivee de Malliavin et pro-
cessus tangent.
Proposition 4.8. Soit (X
t
, t 0) une diusion en dimension 1 dont la dynamique est xee
par lequation dierentielle stochastique
dX
t
= b(X
t
)dt +(X
t
)dW
t
X
0
= x
o` u W est un Brownien, b : R R et : R R sont des fonctions derivables avec des derivees
bornees. Soit Y
t
le processus tangent de X
t
. Y
t
est solution dune equation dierentielle sto-
chastique (voir proposition 4.1). Alors, le processus X
t
est derivable au sens de Malliavin et
sa derivee de Malliavin est donnee par
D
s
X
t
= Y
t
Y
1
s
(X
s
)1
st
, s 0 p.s. (4.9)
De plus, si est une fonction (
1
b
,
D
s
(X
T
) = (X
T
)Y
T
Y
1
s
(X
s
)1
sT
, s 0 p.s.,
et
D
s
_
T
0
(X
t
)dt =
_
T
s
(X
t
)Y
t
Y
1
s
(X
s
)ds, p.s.,
Par ailleurs, on peut reecrire les theor`emes 4.6 et 4.7 pour les diusions.
4.4. CALCUL DE MALLIAVIN 51
4.4.2 Applications aux calculs des sensibilites
Delta pour les variables simples
On commence par utiliser les resultats de la section precedente pour donner une representation
probabiliste du delta. Soit F o. Alors, dapr`es le Theor`eme 4.6
F = E[F] +
_
T
0
E[D
t
F [ T
t
] dW
t
.
On xe maintenant t et i tels que s
F
i1
< t s
F
i
, on a alors
D
t
F =
k
F
j=1
F
(W) 1
[t,T]
(s
F
j
) =
k
F
j=i
F
(W)
qui est independant de t (s
F
i1
, s
F
i
]. On a donc
D
t
F =
_
s
F
i
t
D
s
F
s
F
i
t
ds
do` u, en utilisant le Theor`eme 4.7
E[D
t
F [ T
t
] = E
_
s
F
i
t
D
s
F
s
F
i
t
ds [ T
t
= E
_
F
W
s
F
i
W
t
s
F
i
t
[ T
t
_
.
On obtient nalement le resultat suivant
Proposition 4.9. Soit F o, alors
F = E[F] +
k
F
i=1
_
s
F
i
s
F
i1
E
_
F
W
s
F
i
W
t
s
F
i
t
[ T
t
_
dW
t
.
A s
F
i1
< t s
F
i
xe, la strategie de couverture est donc donnee par la quantite
E
_
F
W
s
F
i
W
t
s
F
i
t
[ T
t
_
, apr`es renormalisation, qui peut etre approchee par Monte-Carlo.
Delta et Gamma pour les fonctions du schema dEuler
On suppose maintenant que F = g(
X
x,n
T
). On suppose egalement que g C
1
p
, que est
inversible sur R
d
et on pose
u(0, x) := E
_
g(
X
x,n
T
)
.
Dapr`es la Proposition 4.2, on a
u(0, x) = E
_
g(
X
x,n
T
)
x
X
x,n
T
,
52 CHAPITRE 4. CALCUL DES SENSIBILIT
ES
ce qui peut se reecrire, en utilisant la remarque 4.7 et la propriete 4.5
u(0, x) =
1
T
E
__
T
0
g(
X
x,n
T
)D
t
X
x,n
T
(
X
x,n
n
t
)
1
x
X
x,n
n
t
dt
_
=
1
T
E
__
T
0
D
t
g(
X
x,n
T
)(
X
x,n
n
t
)
1
x
X
x,n
n
t
dt
_
.
En utilisant le Theor`eme 4.7, on obtient
u(0, x) =
1
T
E
_
g(X
x,n
T
)
__
T
0
_
(
X
x,n
n
t
)
1
x
X
x,n
n
t
_
dW
t
_
_
.
En passant par densite, on obtient
Proposition 4.10. Si (x) est inversible pour tout x R
d
,
1
et g sont ` a croissance
polyn omiale, et b sont C
1
b
, alors
E
_
g(
X
x,n
T
)
=
1
T
E
_
g(X
x,n
T
)
__
T
0
_
(
X
x,n
n
t
)
1
x
X
x,n
n
t
_
dW
t
_
_
.
On retrouve en particulier le resultat de la Proposition 4.3.
Exercice 1. Montrer que sous les conditions de la Proposition 4.10
Eg
_
X
x,n
t
1
, . . . , X
x,n
tn
_
= E
_
g
_
X
x,n
t
1
, . . . , X
x,n
tn
_
__
T
0
h
t
_
(
X
x,n
n
t
)
1
x
X
x,n
n
t
_
dW
t
_
_
,
o` u h L
2
([0, T], dt) verie
_
t
i
0
h
t
dt = 1 pour tout i 1, . . . , n .
On sinteresse maintenant au Gamma de E
_
g(
X
x,n
T
)
. Si on suppose g, ,
1
et b susam-
ment reguli`eres, on obtient en argumentant comme dans la Proposition 4.2 et en utilisant la
Proposition 4.10 que :
2
u
x
i
x
j
(0, x) =
1
T
x
j
E
_
g
_
X
x,n
T
_
_
T
0
_
(
X
x,n
n
t
)
1
x
i
X
x,n
n
t
_
dW
t
_
=
1
T
E
_
g(X
x,n
T
)
x
j
X
x,n
T
_
T
0
_
(
X
x,n
n
t
)
1
x
i
X
x,n
n
t
_
dW
t
_
+
1
T
E
_
g(X
x,n
T
)
_
T
0
_
d
k=1
_
(
X
x,n
n
t
)
1
_
.k
x
j
X
x,n
n
t
_
x
i
X
x,n
n
t
_
k
_
dW
t
_
+
1
T
E
_
g(X
x,n
T
)
_
T
0
_
(
X
x,n
n
t
)
1
x
j
x
i
X
x,n
n
t
_
dW
t
_
,
4.4. CALCUL DE MALLIAVIN 53
o` u
x
est la derivee par rapport ` a x
, i.e.
x
X
x,n
n
t
=
_
x
X
x,n
n
t
_
.
. On sinteresse uniquement
au premier terme qui fait intervenir g. Pour un processus adapte h de carre integrable, on
note maintenant
(h
t
) :=
_
T
0
h
t
dW
t
.
En utilisant la Remarque 4.7 et la Propriete 4.5, on obtient
A := E
_
g(X
x,n
T
)
x
j
X
x,n
T
_
(
X
x,n
n
t
)
1
x
i
X
x,n
n
t
__
=
1
T
E
_
T
0
g(
X
x,n
T
)D
t
X
x,n
T
_
(
X
x,n
n
t
)
1
x
i
X
x,n
n
t
_
(
X
x,n
n
t
)
1
x
j
X
x,n
n
t
dt
=
1
T
E
__
T
0
D
t
_
g(
X
x,n
T
)
_
(
X
x,n
n
t
)
1
x
i
X
x,n
n
t
__
(
X
x,n
n
t
)
1
x
j
X
x,n
n
t
dt
_
1
T
E
__
T
0
g(
X
x,n
T
)D
t
_
(
X
x,n
n
t
)
1
x
i
X
x,n
n
t
_
(
X
x,n
n
t
)
1
x
j
X
x,n
n
t
dt
_
.
Dapr`es le Theor`eme 4.7, ceci implique que
A =
1
T
E
_
g(
X
x,n
T
)
_
(
X
x,n
n
t
)
1
x
i
X
x,n
n
t
_
_
(
X
x,n
n
t
)
1
x
j
X
x,n
n
t
__
1
T
E
__
T
0
g(
X
x,n
T
)D
t
_
(
X
x,n
n
t
)
1
x
i
X
x,n
n
t
_
(
X
x,n
n
t
)
1
x
j
X
x,n
n
t
dt
_
.
En regroupant les termes et en passant par densite, on obtient
Proposition 4.11. Si est inversible sur R
d
, a
1
C
1
p
, g est ` a croissance polyn omiale,
et b sont C
2
b
, alors
x
i
x
j
E
_
g(
X
x,n
T
)
= E
_
g(X
x,n
T
)
ij
,
o` u
ij
:=
1
T
2
_
_
(
X
x,n
n
t
)
1
x
i
X
x,n
n
t
_
_
(
X
x,n
n
t
)
1
x
j
X
x,n
n
t
__
1
T
2
__
T
0
D
t
_
(
X
x,n
n
t
)
1
x
i
X
x,n
n
t
_
(
X
x,n
n
t
)
1
x
j
X
x,n
n
t
dt
_
+
1
T
_
d
k=1
_
(
X
x,n
n
t
)
1
_
.k
x
j
X
x,n
n
t
_
x
i
X
x,n
n
t
_
k
+(
X
x,n
n
t
)
1
x
j
x
i
X
x,n
n
t
_
.
Exercice 2. Verier que dans le mod`ele de Black-Scholes
x
i
x
j X
x
= 0 et retrouver ainsi
la formule (4.4).
Exercice 3.
Etendre la formule de la Proposition 4.11 ` a des payos de la forme
g
_
X
x,n
t
1
, . . . ,
X
x,n
tn
_
sur le mod`ele de lExercice 1.
54 CHAPITRE 4. CALCUL DES SENSIBILIT
ES
Remarque 4.9. Cette approche a ete initiee par [24]. Les formules que nous demontrons ici
correspondent `a la discretisation des formules obtenues en considerant un payo dependant
de X au lieu de
X
n
. Letude de ces methodes a ete poursuivie dans [25], voir egalement [18].
Des extensions au cas des options barri`ere et lookback on ete obtenues par [29]. On pourra
egalement consulter [10, 9, 11] qui traite notamment le cas des options asiatiques et [34] qui
developpe des approches alternatives.
Chapitre 5
Les options americaines
Le calcul du prix et de la couverture dune option americaine est un sujet dactualite en
nance. Le but est dessayer de saranchir du probl`eme de la dimension. En eet, lun des
points forts des methodes de Monte Carlo est detre moins dependant de la dimension du
probl`eme que les methodes liees aux equations aux derivees partielles.
Nous presentons des developpements recents dalgorithmes de Monte Carlo pour calculer le
prix dune option americaine. Il existe trois classes dalgorithme :
1. La premi`ere utilise des approximations de lesperance conditionnelle (Longsta et Sch-
wartz [43] et Tsitsiklis et VanRoy [59]) : nous traiterons uniquement Longsta Scwartz.
2. La deuxi`eme est fondee sur lapproximation du processus de Markov sous-jacent (al-
gorithme de quantication [5, 49] (voir le cours de H. Pham), Broadie et Glasser-
mann [14, 15] et Barraquand et Martineau [8]) que lon nabordera pas ici.
3. La troisi`eme utilise le Calcul de Malliavin pour calculer numeriquement lesperance
conditionnelle [25, 12, 13, 20].
5.1 Introduction
Dans ce chapitre, nous etudierons les options Bermudeennes qui sont des options americaines
ne pouvant etre exercees qu`a certaines dates xes (t
0
, . . . , t
N
= T).
Le sous-jacent au temps (t
n
, 0 n N) est une chane de Markov avec comme matrice de
transition de n `a n + 1 P
n
(x, dy). Cela signie que pour toute fonction f
E(f(X
n+1
)[T
n
) = P
n
f(X
n
) :=
_
R
f(y)P
n
(X
n
, dy),
o` u T
n
= (X
k
, k n).
On suppose que le payo au temps t
n
est donne par (X
n
) o` u est une fonction bornee et
que le facteur dactualisation entre t
j
et t
j+1
sexprime par 1/(1 +r
j
), r
j
etant une constante
strictement positive representant le taux dinteret entre les temps t
j
et t
j+1
. Cela permet de
denir un facteur dactualisation entre les temps j et k, quand j < k, en posant
B(j, k) =
k1
l=j
1
1 +r
l
.
55
56 CHAPITRE 5. LES OPTIONS AM
ERICAINES
On remarque que B(j, j + 1) = 1/(1 + r
j
). Utilisant ces notations, le prix ` a t = 0 de cette
option est
Q
0
= sup
T
0,N
E[B(0, ) (X
)] (5.1)
o` u T
0,N
est lensemble des T
n
-temps darret prenant leurs valeurs dans 0, . . . , N.
Remarque 5.1. Le mod`ele de Black Scholes ` a d dimensions S
x,i
t
, 1 i d, peut secrire
S
x,i
t
= x
i
e
(r
1
2
2
i
)t+
1jp
ij
W
j
t
o` u (W
t
, t 0) est un mouvement Brownien rdimensionel,
2
i
=
1jp
2
ij
et r > 0 le taux
dinteret sans risque. La matrice de transition est denie par
P
n
f(x) = E
_
f(S
x
t
n+1
)[S
tn
= x
_
= E
_
f(S
x
t
n+1
tn
)
_
.
De plus, on a
1 +r
n
= exp(r(t
n+1
t
n
)).
Remarque 5.2. Le schema dEuler dune diusion ddimensionnelle peut secrire
X
n
t
k+1
=
X
n
t
k
+b(
X
n
t
k
)h +(
X
n
t
k
) (W
t
k+1
W
t
k
)
o` u (W
t
, t 0) est un mouvement Brownien rdimensionel et r > 0 le taux dinteret sans
risque. La matrice de transition est denie par
P
k
f(x) = E
_
f(
X
n
t
k+1
)[
X
n
t
k
= x
_
= E
_
f(x +b(x)h +(x) (W
t
k+1
W
t
k
))
_
.
De plus, on a
1 +r
k
= exp(rh).
Attention, nous avons montre que la suite X
t
1
, . . . , X
tn
est une chane de Markov. Mais le
schema dEuler nest pas un processus de Markov.
Les theories de contr ole stochastique montre que Q
0
= u(0, X
0
), o` u u est la solution de
lalgorithme de programmation dynamique
_
u(N, x) = (x)
u(j, x) = max
xR
d ((x), B(j, j + 1)P
j
u(j + 1, x)) , 1 j N.
(5.2)
Le temps darret
= inf j 0, u(j, X
j
) = (X
j
) , (5.3)
est optimal, i.e.
Q
0
= u(0, X
0
) = E(B(0,
) (X
)) .
De plus, le prix Q
j
de loption americaine au temps j donne par
Q
j
= sup
T
j,N
E(B(j, ) (X
) [T
j
) ,
peut etre calcule comme u(j, X
j
) et le temps darret optimal au temps j sera donne par
j
o` u
j
= inf i j; u(i, X
i
) = (X
i
) .
5.2. LALGORITHME DE LONGSTAFF SCHWARTZ 57
5.2 Lalgorithme de Longsta Schwartz
Lalgorithme de Longsta Schwartz consiste en une approximation du temps darret optimal
sur M trajectoires, par les variables aleatoires
(m)
, qui dependent de la trajectoire m. Le
prix est ensuite approche en utilisant une methode de Monte Carlo :
Q
M
0
=
1
M
1iM
B(0,
(m)
)
_
X
(m)
(m)
_
.
5.2.1 Une equation de programmation dynamique pour
La principale caracteristique de cet algorithme est dutiliser un principe de programmation
pour le temps darret optimal lui-meme et non pour la fonction valeur.
Si on remarque que
0
, le temps darret optimal au temps 0, peut etre calcule en utilisant
la suite (
j
, 0 j N) denie par la recurrence suivante :
_
N
= N,
j
= j1
{(X
j
)u(j,X
j
)}
+
j+1
1
{(X
j
)<u(j,X
j
)}
.
(5.4)
De plus, on a
(X
j
) < u(j, X
j
) =
_
(X
j
) < B(j,
j+1
)P
j
u(j + 1, X
j
))
_
=
_
(X
j
) < E
_
B(j,
j+1
)(X
j+1
)
X
j
__
.
Avec cette denition pour
j
, il est facile de verier recursivement que
j
= min i j, (X
i
) = u(i, X
i
) . (5.5)
Ainsi, les
j
(et donc
0
) sont les temps darret optimaux au temps j. An destimer
numeriquement
nous devons trouver une valeur approchee de lesperance conditionnelle
E
_
B
_
j,
j+1
_
_
X
j+1
_
[X
j
_
. (5.6)
Lidee fondamentale de Longsta Schwartz est dintroduire une methode de moindre carre
pour calculer (5.6).
5.2.2 La methode de regression
On note Z
j+1
la variable aleatoire
Z
j+1
= B
_
j,
j+1
_
_
X
j+1
_
.
Comme B et sont bornees, Z
j+1
lest aussi. Lesperance conditionnelle peut aussi etre vue
comme une projection dans L
2
, donc
E(Z
j+1
[X
j
)
58 CHAPITRE 5. LES OPTIONS AM
ERICAINES
peut sexprimer comme
j
(X
j
), o` u
j
minimise
E
_
[X
j+1
f(X
j
)]
2
_
parmi les fonctions f telle que E
_
f(X
j
)
2
_
< +.
On se donne maintenant une suite de fonctions (g
l
, l 1) qui est une base de L
2
j
=
L
2
_
R
d
, loi de X
j
_
pour tous j, 1 j N. Pour tous j,
j
peut sexprimer comme
j
(x) =
l1
l
g
l
(x),
o` u la convergence de la serie seectue dans L
2
. Nous avons donc une mani`ere de calculer le
temps darret optimal en utilisant la procedure :
1. On initialise
N
= N.
2. On denit
j
= (
j
l
, l 0) comme la suite minimisant
E
_
_
B
_
j,
j+1
_
_
X
j+1
_
( g)(X
j
)
_
2
_
o` u g =
l1
l
g
l
.
3. On denit
j
= j1
(X
j
)(
j
g)(X
j
)
+
j+1
1
(X
j
)<(
j
g)(X
j
)
.
Cet algorithme nest pas reellement utilisable car il est impossible de calculer lesperance du
probl`eme de minimisation au pas 2.
Pour implementer cet algorithme, lidee est de tronquer la serie ` a lindice k. Cela conduit ` a
une procedure modiee :
1. On initialise
N
= N. Alors,
2. On denit
j,k
= (
j,k
l
, 0 l k) comme le vecteur minimisant
E
_
_
B(j,
j+1
)
_
X
j+1
_
(
j,k
g)(X
j
)
_
2
_
(5.7)
o` u (
j,k
g)(x) =
k
l=1
j,k
l
g
l
(x).
3. On denit
j
= j1
(X
j
)(
j,k
g)(X
j
)
+
j+1
1
(X
j
)<(
j,k
g)(X
j
)
.
Enn, il reste `a remplacer lesperance de (5.7) par du Monte Carlo.
5.2.3 Du Monte Carlo pour le probl`eme de regression
Soit (X
(m)
n
, 0 n N), pour 1 m M, M trajectoires simulant le processus (X
n
, 0
n N). On remplace le probl`eme de minimisation 5.7 par
1. On initialise
M
N
= N.
2. On denit
j,k
M
= (
j,k
M
, 0 j k) comme le vecteur minimisant
1
M
1mM
_
( g)
_
X
(m)
j
_
B(j,
j+1
)
_
X
(m)
j+1
__
2
(5.8)
5.3. APPROXIMATION DESP
ERANCES CONDITIONNELLES 59
3. On denit pour chaque trajectoire m
(m)
j
= j1
(X
j
)(
j,k
M
g)(X
j
)
+
(m)
j+1
1
(X
j
)<(
j,k
M
g)(X
j
)
.
Cet algorithme est maintenant fonctionnel et lestimateur du prix est donne par
1
M
B(0,
(m)
)(X
(m)
(m)
).
Remarque 5.3. Le probl`eme de minimisation (5.8) est un probl`eme standard destimation
par les moindres carres. Voir par exemple dans [50].
La base (g
k
, k 1) est supposee independante du temps j. Cela est juste par simplicite et
on peut tr`es bien changer de base ` a chaque temps.
Tr`es souvent, en nance, pour le call et le put
P((X
j
) = 0) > 0,
pour tous j. Comme (X
j
) = 0 A
j
, il nest pas necessaire de calculer
E
_
B
_
j,
j+1
_
_
X
j+1
_
X
j
_
sur lensemble (X
j
) = 0 et on peut se restreindre aux trajectoires telles que
_
(X
j
)
> 0
_
.
Une preuve rigoureuse de la convergence de cet algorithme est donnee dans [17].
5.3 Approximation desperances conditionnelles
Lapproximation desperances conditionnelles ` a laide du calcul de Malliavin a ete initiee par
[25], puis par [12, 13, 20]. Nous allons ici essayer de donner un aper cu de ces methodes. Par
souci de simplier lecriture nous nous limiterons au cas d = 1.
Evidemment, linteret de
ces methodes est justement le cas d > 1 car en dimension 1, des methodes deterministes
fournissent de bon moyen pour calculer le prix dune option americaine. Pour plus de details
sur le cas general, on pourra consulter [4].
On consid`ere donc une diusion reelle satisfaisant lequation
dX
t
= b(X
t
)dt +(X
t
)dW
t
X
0
= x R.
On suppose que b et sont dans (
1
b
. On note
n
W
i
= W
t
i+1
W
t
i
. On lui associe son schema
dEuler
X
n
t
(x). Le but est donc de calculer
E
_
f(
X
n
t
k+1
) [
X
n
t
k
= y
_
.
o` u y R et f une fonction `a croissance polyn omiale. Dans ce cas on a le theor`eme
60 CHAPITRE 5. LES OPTIONS AM
ERICAINES
5.3.1 Calcul de Malliavin : complements
Le point central de la theorie du Calcul de Malliavin est la formule dintegration par parties.
Denition 5.1. Soient F et G deux variables aleatoires reelles de carres integrables. On
dit quelles verient la propriete IP(F, G) (Integration by parts) si il existe une variable
aleatoire de carre integrable telle que :
E
_
(F)G
= E[(F)
F
(G)] , (
b
(R, R).
On a alors le lemme suivant
Lemme 5.1. 1. On suppose que IP(F, 1) est vraie. Alors la loi de la variable aleatoire F
a une densite p donnee par
p() = E[H(F )
F
(1)] ,
o` u H(x) = 1
x0
.
2. Si IP(F, 1) et IP(F, G) sont vraies, alors
E[G [ F = ] =
E[H(F )
F
(G)]
E[H(F )
F
(1)]
.
Remarque 5.4. Cette formulation de la densite a ete abondamment utilisee par [46] pour
etudier la regularite des densites de variables aleatoires. Une etude sur les methodes de
reduction de variance de lestimateur ainsi obtenu a ete menee par [21] en dimension 1.
Demonstration. 1. Nous allons employer des techniques de regularisation. Soit une fonc-
tion reguli`ere, symetrique, positive dont le support est contenu dans [1, 1] et telle
que
_
1
1
(t)dt = 1. On consid`ere alors
(x) = (x/)/ et
(x) =
_
x
(t)dt. On
remarque que
(x) =
(x) et que lim
0
(x) =
(x) o` u
(x) = 0 si x < 0
= 1/2 si x = 0
= 1 si x > 0.
Soit maintenant G
une variable aleatoire independante de F telle que sa loi est
(x)dx.
Alors, lim
0
E[f(F G
)] = E[f(F)] pour toute fonction f continue. Ainsi,
E[f(F G
)] =
_
R
E[f(F z)
(z)]dz =
_
R
f(z)E[
(F z)]dz.
Comme la propriete IP(F, 1) est vraie
E[
(F z)] = E
_
(F z)
= E[
(F z)
F
(1)] .
Do` u dapr`es le theor`eme de Lebesgue
lim
0
E[f(F G
)] =
_
R
f(z)E
_
(F z)
F
(1)
_
dz.
5.3. APPROXIMATION DESP
ERANCES CONDITIONNELLES 61
Donc pour toute fonction f continue,
E[f(F)] =
_
R
f(z)E
_
(F z)
F
(1)
_
dz.
ce qui prouve que la densite de F est donnee par
p(z) = E
_
(F z)
F
(1)
_
= E
_
1
[z,+)
(F)
F
(1)
= E[H(F z)
F
(1)] .
On a pu remplacer
(x) par 1
[0,+)
car on sait dej` a que la loi de F est absolument
continue par rapport `a la mesure de Lebesgue.
2. Nous avons juste `a verier que pour toute fonction f continue bornee on a E[f(F)G] =
E[f(F)(G)] o` u
(z) =
E[H(F z)
F
(G)]
E[H(F z)
F
(1)]
.
En utilisant les memes fonctions de regularisation que ci-dessus la propriete IP(F, G)
permet darmer que
E[f(F)G] = E
_
G lim
0
_
R
f(z)
(F z)dz
_
= lim
0
_
R
f(z)E[G
(F z)] dz
= lim
0
_
R
f(z)E
_
G
(F z)
dz
= lim
0
_
R
f(z)E[G
(F z)
F
(G)] dz
=
_
R
f(z)E
_
G1
[0,)
(F z)
F
(G)
dz
=
_
R
f(z)(z)p(z)dz = E[f(F)(F)] .
Nous allons egalement donner une version localisee du lemme ci-dessus.
Denition 5.2. Soient F et G deux variables aleatoires reelles de carres integrables et soit
D R. On dit quelles verient la propriete IP
D
(F, G) (Integration by parts) si il existe
une variable aleatoire de carre integrable telle que :
E
_
(F)G
= E
_
(F)
D
F
(G)
, (
b
(R, R).
On retrouve alors le meme lemme dont la preuve est rigoureusement identique.
Lemme 5.2. 1. On suppose que IP
D
(F, 1) est vraie. Alors la loi de la variable aleatoire
F a une densite p locale sur D donnee par
p
D
() = E
_
H(F )
D
F
(1)
.
62 CHAPITRE 5. LES OPTIONS AM
ERICAINES
2. Si IP
D
(F, 1) et IP
D
(F, G) sont vraies, alors
E[G [ F = ] =
E[H(F )
F
(G)]
E[H(F )
F
(1)]
D.
Nous devons maintenant relier les denitions 5.1 et 5.2 ` a la formule dintegration par parties
etablies precedemment 4.7 et au schema dEuler.
Lemme 5.3. Soit
X
n
t
i
le schema dEuler dune diusion en dimension 1 et g une fonction
R R ` a croissance polyn omiale. Alors
1. La propriete IP(
X
n
t
i
, g(
X
n
t
i+1
)) est vraie, i.e.
E
_
(
X
n
t
i
)g(
X
n
t
i+1
)
_
= E
_
(
X
n
t
i
)
X
n
t
i
[g](
X
n
t
i+1
)
_
,
avec
X
n
t
i
[g](
X
n
t
i+1
) = g(
X
n
t
i+1
)
_
n
W
i
h(
X
n
t
i1
)
1
h(
X
n
t
i
)
__
1 +b
(
X
n
t
i
)h
_
n
W
i+1
+
(
X
n
t
i
)(
n
W
2
i+1
h)
_
_
. (5.9)
2. Pour un > 0 xe, soit (
1
b
(R) telle que Supp(
) B
() = ( , + ), avec
> 0. Soit (
1
b
(R) telle que [
B()
= 1. Alors,
E
_
(
X
n
t
i
)g(
X
n
t
i+1
)
_
= E
_
(
X
n
t
i
)
X
n
t
i
[g](
X
n
t
i+1
)
_
,
avec
X
n
t
i
[g](
X
n
t
i+1
) = g(
X
n
t
i+1
)
_
(
X
n
t
i
) +(
X
n
t
i
)
_
n
W
i
h(
X
n
t
i1
)
1
h(
X
n
t
i
)
__
1 +b
(
X
n
t
i
)h
_
n
W
i+1
+
(
X
n
t
i
)(
n
W
2
i+1
h)
_
__
. (5.10)
En particulier IP
D
(
X
n
t
i
, g(
X
n
t
i+1
)) est vraie avec D = B
()
Demonstration. Nous allons faire la preuve du point 1, celle du point 2 sobtenant avec les
memes arguments (remarquer que
). La preuve va consister en lapplication de la
formule dintegration par parties. Pour cela on doit dabord remarquer que
(
X
n
t
i
)h =
_
t
i+1
t
i
(
X
n
t
i
)dt =
_
t
i+1
t
i
D
t
X
n
t
i
dt. (5.11)
Ensuite, on saper coit que
g(
X
n
t
i+1
) = g(
X
n
t
i
+b(
X
n
t
i
)h +(
X
n
t
i
)
n
W
i+1
) := g((
X
n
t
i
,
n
W
i+1
)).
5.3. APPROXIMATION DESP
ERANCES CONDITIONNELLES 63
Comme
n
W
i+1
est independant de T
t
i
,
E
_
(
X
n
t
i
)g((
X
n
t
i
,
n
W
i+1
))
= E
_
E
_
(
X
n
t
i
)g((
X
n
t
i
, y))
y=
n
W
i+1
_
.
Etape 1 : Nous allons commencer par calculer D
t
_
(
X
n
t
i
)g((
X
n
t
i
, y))
_
.
(
X
n
t
i
)D
t
X
n
t
i
g((
X
n
t
i
, y)) = D
t
_
(
X
n
t
i
)g((
X
n
t
i
, y))
_
(
X
n
t
i
)g
((
X
n
t
i
, y))(1 +b
(
X
n
t
i
)h +
(
X
n
t
i
)y)D
t
X
n
t
i
Utilisant la remarque (5.11) et Fubini, on a
E
_
(
X
n
t
i
)g((
X
n
t
i
, y))
= E
_
D
t
_
(
X
n
t
i
)g((
X
n
t
i
, y))
_
E
_
(
X
n
t
i
)g
((
X
n
t
i
, y))(1 +b
(
X
n
t
i
)h +
(
X
n
t
i
)y)D
t
X
n
t
i
=
1
(
X
n
t
i1
)h
E
_
_
t
i
t
i1
D
t
_
(
X
n
t
i
)g((
X
n
t
i
, y))
_
dt
_
. .
A
E
_
(
X
n
t
i
)g
((
X
n
t
i
, y))(1 +b
(
X
n
t
i
)h)
. .
B
E
_
(
X
n
t
i
)g
((
X
n
t
i
, y))
(
X
n
t
i
)y)D
t
X
n
t
i
. .
C
Etape 2 : le terme A On applique la formule dintegration par parties 4.7 conditionnee ` a
T
t
i1
ce qui donne
A =
1
(
X
n
t
i1
)h
E
_
(
X
n
t
i
)g((
X
n
t
i
, y))
_
t
i
t
i1
dW
t
_
=
1
(
X
n
t
i1
)h
E
_
(
X
n
t
i
)g((
X
n
t
i
, y))
n
W
i
.
On a donc obtenu lidentite :
E
_
(
X
n
t
i
)[T
t
i1
=
1
(
X
n
t
i1
)h
E
_
(
X
n
t
i
)
n
W
i
[T
t
i1
(5.12)
Etape 3 : le terme B En fait ce que lon veut calculer est
E
_
B[
y=
n
W
i+1
= E
_
(
X
n
t
i
)g
(
X
n
t
i+1
)(1 +b
(
X
n
t
i
)h)
_
= E
_
(
X
n
t
i
)(1 +b
(
X
n
t
i
)h)E
_
g
(
X
n
t
i+1
)[T
t
i
__
.
En appliquant (5.12) `a g et au temps t
i
on a
E
_
B[
y=
n
W
i+1
=
1
(
X
n
t
i
)h
E
_
(
X
n
t
i
)(1 +b
(
X
n
t
i
)h)g(
X
n
t
i+1
)
n
W
i+1
_
.
64 CHAPITRE 5. LES OPTIONS AM
ERICAINES
Etape 4 : le terme C On commence comme pour B
E
_
C[
y=
n
W
i+1
= E
_
(
X
n
t
i
)g
(
X
n
t
i+1
)
(
X
n
t
i
)
n
W
i+1
_
= E
_
(
X
n
t
i
)
(
X
n
t
i
)E
_
g
(
X
n
t
i+1
)
n
W
i+1
[T
t
i
__
.
Or D
t
n
W
i+1
= 1 pour t (t
i
, t
i+1
], et
D
t
_
g(
X
n
t
i+1
)
n
W
i+1
_
= g
(
X
n
t
i+1
)
n
W
i+1
D
t
X
n
t
i+1
+g(
X
n
t
i+1
).
La formule dintegration par parties permet alors de dire que
E
_
g
(
X
n
t
i+1
)
n
W
i+1
[T
t
i
_
=
1
(
X
n
t
i
)h
E
__
t
i+1
t
i
D
t
X
n
t
i+1
g
(
X
n
t
i+1
)
n
W
i+1
dt[T
t
i
_
=
1
(
X
n
t
i
)h
E
__
t
i+1
t
i
D
t
_
g(
X
n
t
i+1
)
n
W
i+1
_
dt[T
t
i
_
1
(
X
n
t
i
)
E
_
g(
X
n
t
i+1
)[T
t
i
_
=
1
(
X
n
t
i
)h
E
_
g(
X
n
t
i+1
)
n
W
i+1
_
t
i+1
t
i
dW
t
[T
t
i
_
1
(
X
n
t
i
)
E
_
g(
X
n
t
i+1
)[T
t
i
_
=
1
(
X
n
t
i
)h
_
E
_
g(
X
n
t
i+1
)
n
W
2
i+1
[T
t
i
_
hE
_
g(
X
n
t
i+1
)[T
t
i
__
Ainsi,
E
_
C[
y=
n
W
i+1
=
1
(
X
n
t
i
)h
E
_
(
X
n
t
i
)
(
X
n
t
i
)g(
X
n
t
i+1
)(
n
W
2
i+1
h)
_
.
En rassemblant les trois termes on obtient la preuve du theor`eme.
On peut maintenant enoncer le theor`eme principal
Theor`eme 5.4. 1. Pour tous k = 0, . . . , n 1, et y R, on a
E
_
g(
X
n
t
i+1
) [
X
n
t
i
= y
_
=
E
_
H(
X
n
t
i
y)
X
n
t
i
[g](
X
n
t
i+1
)
_
E
_
H(
X
n
t
i
y)
X
n
t
i
[1](
X
n
t
i+1
)
_.
o` u
X
n
t
i
[g] et
X
n
t
i
[1] sont donnes par (5.9).
2. Pour tous k = 0, . . . , n 1, et y R, on a
E
_
g(
X
n
t
i+1
) [
X
n
t
i
= y
_
=
E
_
H(
X
n
t
i
y)
X
n
t
i
[g](
X
n
t
i+1
)
_
E
_
H(
X
n
t
i
y)
X
n
t
i
[1](
X
n
t
i+1
)
_.
o` u
X
n
t
i
[g] et
X
n
t
i
[1] sont donnes par (5.10).
5.3. APPROXIMATION DESP
ERANCES CONDITIONNELLES 65
Remarque 5.5. Les fonctions et
agissent comme des fonctions de localisation : on
selectionne les trajectoires qui ne sont pas trop eloignees de x. Typiquement, elles atteignent
leur maximum en 0 et decroissent ensuite rapidement. On peut choisir les fonctions et
de mani`ere `a minimiser la variance integree des estimateurs du numerateur et denominateur.
Il est montre dans [12] que les fonctions et
optimales sont de type exponentielle (y) =
e
y
,
(y) = e
y
, o` u
2
= E
_
g(
X
n
t
i+1
)
2
X
n
t
i
[1](
X
n
t
i+1
)
_
/E
_
g(
X
n
t
i+1
)
2
_
2
= E
_
X
n
t
i
[1](
X
n
t
i+1
)
_
.
On peut verier que et ont une evolution avec n de lordre de
n.
Exercice 4. Demontrer un resultat analogue dans le mod`ele de Black et Scholes.
La formulation du Theor`eme 5.4 fournit un estimateur naturel pour lesperance conditionnelle.
On peut ainsi considerer N copies independantes (
X
n
(j)
)
N
j=1
de
X
n
et denir un estimateur
de lesperance conditionnelle par
E
_
g(
X
n
t
i+1
) [
X
n
t
i
_
=
N
j=1
H(
X
n
t
i
+X
n
(j)
t
i
)
X
n
(j)
t
i
[g](
X
n
(j)
t
i+1
)
H(
X
n
t
i
+X
n
(j)
t
i
)
X
n
(j)
t
i
[1](
X
n
(j)
t
i+1
)
o` u
(j)
i
et
(j)
i
sont les operateurs correspondant ` a la j-`eme trajectoire simulee. En pratique ces
estimateurs risquent detre instables ` a cause de la division (ils nont dailleurs aucune raison
detre dans L
1
!). Il faut donc les corriger leg`erement. Si est ` a croissance polyn omiale, il est
assez facile de construire des polyn omes et tels que
(
X
n
t
i
) E
_
g(
X
n
t
i+1
) [
X
n
t
i
_
(
X
n
t
i
) .
On denit alors lestimateur de lesperance conditionnelle par
E
_
g(
X
n
t
i+1
) [
X
n
t
i
_
:= (
X
n
t
i
)
E
_
g(
X
n
t
i+1
) [
X
n
t
i
_
(
X
n
t
i
) .
Comme
X
n
t
i
est dans tous les L
p
, p 1, on obtient ainsi un estimateur avec de bonnes
proprietes dintegrabilite. On a le resultat de convergence suivant.
Theor`eme 5.5. Sous les hypoth`eses du Theor`eme 5.4, si on prend et
de la forme e
n|x|
avec
n
n quand n , alors, pour tout p 1,
_
_
_
E
_
g(
X
n
t
i+1
) [
X
n
t
i
_
E
_
g(
X
n
t
i+1
) [
X
n
t
i
__
_
_
L
p
C
n
1
4p
N
1
2p
o` u C ne depend pas de n et N.
La preuve de ce resultat nest pas tr`es dicile mais un peu longue. Nous renvoyons ` a [13]
pour les details et pour letude du cas general.
66 CHAPITRE 5. LES OPTIONS AM
ERICAINES
Remarque 5.6. Dapr`es le Lemme 5.1, si on connat explicitement la densite f
X
n
t
i
de
X
n
t
i
,
on peut egalement utiliser comme estimateur
E
_
g(
X
n
t
i+1
) [
X
n
t
i
= x
_
=
N
j=1
H(
X
n
t
i
+X
n
(j)
t
i
)
X
n
(j)
t
i
[g](
X
n
(j)
t
i+1
)
f
X
n
t
i
(x)
.
Remarque 5.7. Lorsque d 2, un resultat similaire ` a celui des Theor`emes 5.4 et 5.5 peut
etre obtenu mais lecriture de lestimateur est plus compliquee. Dans [12], vous trouverez une
ecriture en terme dintegrales de Skorohod iterees. Le cas du mod`ele de Black-Scholes a ete
etudie par [20], la formulation est alors plus simple. On peut neanmoins obtenir une forme
elegante de ce resultat dans le cas o` u
X
n
= X = W. A un changement de variable pr`es, il
est souvent possible de se ramener `a ce cas. On a alors sous des conditions analogues ` a celles
du Theor`eme 5.4
E
_
g(W
t
i+1
) [ W
t
i
= x
=
E
_
g(Wt
i+1
)
d
=1
1
x
t
i
e
(W
t
i
x)
n
T
(
n
W
n
W
i+1
)+
_
E
_
d
=1
1
x
t
i
e
(W
t
i
x)
n
T
n
W
i
+
_
.
La convergence de lestimateur L
p
est alors en n
d
4p
/N
1
2p
. Dans ce cas particulier, on peut
simplier la formulation de lestimateur puisque lon connat explicitement la densite des
W
t
i
, voir Remarque 5.6.
Exemple 5.1. On consid`ere le processus suivant
dX
t
= diag [X
t
] dW
t
, X
1
0
= X
2
0
= X
3
0
= 1 .
avec
=
_
_
0.2 0 0
0.08 0.4 0
0.03 0.15 0.32
_
_
.
On estime la densite du processus et lesperance conditionnelle
r(x) = 100 E
_
_
X
1
2
+X
2
2
2
X
3
2
_
+
[ X
1
= x
_
en dierents points. On donne le resultat moyen obtenu ainsi que lecart-type de lestimateur
avec ou sans fonction de localisation.
Densite x
1
= 1.3
x
3
\x
2
0.7 1.0 1.3
Valeur exacte 0.29 0.56 0.48
0.7 Avec localisation 0.30[0.03] 0.56[0.02] 0.48[0.01]
Sans localisation 0.30[0.41] 0.57[0.43] 0.51[0.44]
Valeur exacte 0.59 0.70 0.43
1.0 Avec localisation 0.59[0.02] 0.70[0.01] 0.45[0.27]
Sans localisation 0.60[0.47] 0.72[0.48] 0.47[0.49]
Valeur exacte 0.44 0.38 0.18
1.3 Avec localisation 0.44[0.01] 0.38[0.00] 0.18[0.00]
Sans localisation 0.45[0.48] 0.40[0.49] 0.22[0.51]
5.4. APPLICATION
`
A L
EVALUATION DOPTIONS AM
ERICAINES 67
Esperance conditionnelle x
1
= 0.9
x
3
\x
2
0.9 1.0 1.1
Valeur exacte 17.26 20.56 24.05
0.9 Avec localisation 17.28[1.12] 20.49[1.19] 24.06[1.17]
Sans localisation 16.88[5.01] 20.62[7.14] 25.04[11.52]
Valeur exacte 13.70 16.59 19.61
1.0 Avec localisation 13.72[0.82] 16.59[0.92] 19.73[1.00]
Sans localisation 12.97[6.20] 16.08[10.41] 21.35[25.48]
Valeur exacte 10.88 13.39 16.11
1.1 Avec localisation 10.94[0.85] 13.48[0.90] 16.32[1.05]
Sans localisation 10.58[17.54] 13.81[28.01] 13.19[166.22]
On observe une tr`es forte volatilite de lestimateur en labsence de fonction de localisation. Il
est donc absolument necessaire de lutiliser. Meme avec celle-ci, la variance reste forte. Cette
approche doit donc etre combinee avec dautres techniques de reduction de variance d`es que
cela est possible.
5.4 Application `a levaluation doptions americaines
On revient maintenant au probl`eme devaluation doptions americaines. On consid`ere le
probl`eme discretise
p
n
(t
n
,
X
n
tn
) = g(
X
n
tn
)
p
n
(t
i
,
X
n
t
i
) = max
_
g(
X
n
t
i
) , e
rT/n
E
_
p
n
(t
i+1
,
X
n
t
i+1
) [
X
n
t
i
__
, i 0, . . . , n 1 .
Si g est lipschitzienne, il est facile de construire une suite de polyn omes
i
(x) =
i
+
i
|x|
2
tels que les (
i
,
i
) sont uniformement bornes en i et n et tels que
_
_
_E
_
g(
X
n
tn
) [
X
n
t
n1
__
_
_
n1
(
X
n
t
n1
)
et i
_
_
_E
_
g(
X
n
t
i
) e
rT/n
i
(
X
n
t
i
) [
X
n
t
i1
__
_
_
i1
(
X
n
t
i1
) .
On peut donc utiliser lestimateur du Theor`eme 5.5 pour calculer les esperances condition-
nelles. Lalgorithme utilise est le suivant :
On consid`ere nN copies (
X
n
(1)
, . . . ,
X
n
(nN)
) de
X
n
=:
X
n
(0)
, et on pose ^
i
:= (i 1)N +
1, . . . , iN.
Initialisation : Pour j 0 ^
n
, on pose : p
n
(t
n
,
X
n
(j)
tn
) = g
_
X
n
(j)
tn
_
.
Recurrence retrograde : Pour i = n, . . . , 1, on pose, pour j 0 ^
i1
:
p
n
(t
i1
,
X
n
(j)
t
i1
) = max
_
g(X
n
(j)
t
i1
) , e
rT/n
E
_
p
n
(t
i
,
X
n
(j)
t
i
) [
X
n
(j)
t
i1
__
o` u
E
_
p
n
(t
i
,
X
n
(j)
t
i
) [
X
n
(j)
t
i1
_
=
i1
(
X
n
(j)
t
i1
)
E
_
p
n
(t
i
,
X
n
(j)
t
i
) [
X
n
(j)
t
i1
_
i1
(
X
n
(j)
t
i1
)
E
_
p
n
(t
i
,
X
n
(j)
t
i
) [
X
n
(j)
t
i1
_
:=
N
i
1
X
n
(j)
t
i1
X
n
()
t
i1
p
n
(t
i
,
X
n
()
t
i
)
()
i1
_
(
X
n
()
t
i1
X
n
(j)
t
i1
)
_
N
i
1
X
n
(j)
t
i1
X
n
()
t
i1
()
i1
_
(
X
n
()
t
i1
X
n
(j)
t
i1
)
_
68 CHAPITRE 5. LES OPTIONS AM
ERICAINES
pour i 1 et pour i = 1
E
_
p
n
(t
1
,
X
n
(j)
t
1
)
_
:=
1
N
N
1
p
n
(t
1
,
X
n
()
t
1
) .
Comme on fait n approximations de lesperance conditionnelle, lerreur est de lordre de n
fois celle donnee par le Theor`eme 5.5, i.e.
max
0in
| p
n
(t
i
,
X
n
t
i
) p
n
(t
i
,
X
n
t
i
)|
L
p Cn
_
n
1/4p
/N
1/2p
_
.
Remarque 5.8. On pourra bien evidemment, et cest meme fortement recommande, coupler
cet algorithme avec une methode de reduction de variance de type variable de contr ole.
Remarque 5.9. Tout ceci se generalise ` a une large classe dequations forward-backward. La
presentation generale de la methode et les vitesses de convergence sont dues ` a [13]. Lorsque
le processus
X
n
est de dimension d, la vitesse de convergence devient n
_
n
d/4p
/N
1/2p
_
. Cette
approche a ete initiee par [19] et [43] mais en utilisant des outils dierents pour le calcul des
esperances conditionnelles.
Bibliographie
[1] P. Baldi, L. Caramellino, and M.G. Iovino. Pricing single and double barrier options via
sharp large deviations. Preprint, 1997.
[2] P. Baldi, L. Caramellino, and M.G. Iovino. Pricing complex barrier options with general
features using sharp large deviation estimate. Proceedings of the MCQMC Conference,
Calremont (LA), USA, 1999.
[3] P. Baldi, L. Caramellino, and M.G. Iovino. Pricing general barrier options : a numerical
approach using sharp large deviations. To appear in Mathematical Finance (1999), 1999.
[4] V. Bally, L. Caramellino, and A. Zanette. Pricing and hedging american options by
monte carlo using a malliavin calculus approach. Technical Report 4804, INRIA, 2003.
[5] V. Bally and G. Pag`es. A quantization algorithm for solving multidimensional optimal
stopping problems. Technical report 628, universite Paris 6, 2000.
[6] V. Bally and D. Talay. The law of the Euler scheme for stochastic dierential equations
(I) : convergence rate of the distribution function. Probability Theory and Related Fields,
104(1), 1996.
[7] V. Bally and D. Talay. The law of the Euler scheme for stochastic dierential equations
(II) : convergence rate of the density. Monte Carlo Methods and Applications, 2 :93128,
1996.
[8] J. Barraquand and D. Martineau. Numerical valuation of high dimensional multivariate
american securities. J. of Finance and Quantitative Analysis, 30 :383405, 1995.
[9] E. Benhamou. An application of malliavin calculus to continuous time asian options
greeks. Technical report, Financial Markets Research Centre, London Business School,
2000.
[10] E. Benhamou. Faster greeks for discontinuous payo options (a malliavin calculus ap-
proach in black world. Technical report, Financial Markets Research Centre, London
Business School, 2000.
[11] E. Benhamou. A generalisation of malliavin weighted scheme for fast computation of the
greeks. Technical report, Financial Markets Research Centre, London Business School,
2000.
[12] B. Bouchard, I. Ekeland, and N. Touzi. On the malliavin approach to monte carlo
approximation of conditional expectations. Technical report, preprint, 2002.
[13] B. Bouchard and N. Touzi. Discrete time approximation and monte-carlo simulation of
backward stochastic dierential equations. Technical report, preprint, 2002.
69
70 BIBLIOGRAPHIE
[14] M. Broadie and P. Glassermann. Pricing american-style securities using simulation. J.of
Economic Dynamics and Control, 21 :13231352, 1997.
[15] M. Broadie and P. Glassermann. A stochastic mesh method for pricing high-dimensional
american options. Working Paper, Columbia University :137, 1997.
[16] J.M.C. Clark and R.J. Cameron. The maximum rate of convergence of discrete ap-
proximations for stochastic dierential equations. In B. Grigelionis, editor, Stochastic
Dierential Systems Filtering and Control, volume 25 of Lecture Notes in Control and
Information Sciences. Proceedings of the IFIP Working Conference, Vilnius, Lithuanie,
1978, Springer-Verlag, 1980.
[17] E. Clement, D. Lamberton, and P. Protter. An analysis of the lonsta-schwartz algorithm
for american option pricing. Technical Report 04/2001, University of Marne-La-Vallee,
April 2001.
[18] J. Cvitani`c, J. Ma, and J. J. Zhang. Ecient computation of hedging portfolios for
options with discontinuous payos. to appear in Mathematical Finance, 2001.
[19] Carriere E. Valuation of the early-exercise price for options using simulations and non-
parametric regression. Insurance : mathematics and Economics, 19 :1930, 1996.
[20] Lions P.-L. et H. Regnier. Calcul du prix et des sensibilites dune option americaine par
une methode de monte carlo. Technical report, preprint, 2001.
[21] Kohatsu-Higa A. et R. Pettersson. Variance reduction methods for simulation of densities
on wiener space. SIAM Journal on Numerical Analysis, 2001.
[22] O. Faure. Numerical pathwise approximation of stochastic dierential equation. Applied
Stochastic Models and Data Analysis, 1992.
[23] O. Faure. Simulation du Mouvement Brownien et des Diusions. PhD thesis, Ecole
Nationale des Ponts et Chaussees, 1992.
[24] E. Fournie, J. M. Lasry, J. Lebuchoux, and P. L. Lions. Applications of malliavin calculus
to monte-carlo methods in nance. i. Finance and Stochastics, 3(4) :391412, 1999.
[25] E. Fournie, J. M. Lasry, J. Lebuchoux, and P. L. Lions. Applications of malliavin calculus
to monte-carlo methods in nance. ii. Finance and Stochastics, 5(2) :201236, 2001.
[26] J.G. Gaines and T.J. Lyons. Variable step size control in the numerical solution of
stochastic dierential equations. (submitted), 1991.
[27] Paul Glasserman and David D. Yao. Some guildelines and guarantees for common
random numbers. Manage. Sci., 38(6) :884908, 1992.
[28] P.W. Glynn. Optimization of stochastic systems via simulation. In Proceedings of the
1989 Winter simulation Conference, pages 90105. San Diego, Society for Computer
Simulation, 1989.
[29] A. Gobet, E. et Kohatsu-Higa. Computation of greeks for barrier and lookback options
using malliavin calculus. Mathematical Finance, 2001.
[30] E. Gobet. Schema dEuler continu pour des diusions tuees et options barriere. (Conti-
nuous Euler scheme for killed diusions and barrier options). C. R. Acad. Sci., Paris,
Ser. I, Math., 326(12) :14111414, 1998.
[31] E. Gobet. Schema dEuler discret pour diusion multidimensionnelle tuee. (Discrete
Euler scheme for killed multidimensional diusion). C. R. Acad. Sci., Paris, Ser. I,
Math., 328(6) :515520, 1999.
BIBLIOGRAPHIE 71
[32] E. Gobet. Weak approximation of killed diusion using euler schemes. Stochastic Pro-
cesses and their Applications, 87 :167197, 2000.
[33] E. Gobet. Euler schemes and half-space approximation for the simulation of diusion in
a domain. ESAIM Probability and Statistics, 5 :261297, 2001.
[34] E. Gobet and R. Munos. Sensitivity analysis using it o-malliavin calculus and martingales.
Technical report, preprint CMAP, ecole Polytechnique, 2002.
[35] N. Ikeda and S. Watanabe. Stochastic Dierential Equations and Diusion Processes
(2nd Ed.). North Holland, 1989.
[36] S. Kanagawa. On the rate of convergence for Maruyamas approximate solutions of
stochastic dierential equations. Yokohama Math. J., 36 :7985, 1988.
[37] I. Karatzas and S. E. Shreve. Brownian Motion and Stochastic Calculus. Springer-Verlag,
New York, second edition, 1991.
[38] A.G.Z Kemna and A.C.F. Vorst. A pricing method for options based on average asset
values. J. Banking Finan., pages 113129, March 1990.
[39] P.E. Kloeden and E. Platen. Numerical Solution of Stochastic Dierential Equations.
Springer Verlag, 1992.
[40] B. Lapeyre, E. Pardoux, and R. Sentis. Methodes de Monte Carlo pour les equations de
transport et de diusion. Number 29 in Mathematiques & Applications. Springer-Verlag,
1998.
[41] B. Lapeyre and E. Temam. Competitive monte carlo methods for asian options. Journal
of Computational Finance, 5, 2001.
[42] P. LEcuyer and G. Perron. On the convergence rates of ipa and fdc derivatives estima-
tors. Oper. Res., 42 :643656, 1994.
[43] F.A. Longsta and E.S. Schwartz. Valuing american options by simulations :a simple
least-squares approach. Working Paper Anderson Graduate School of Management Uni-
versity of California, 25, 1998.
[44] Annie Miller. Methodes de monte carlo. Note de Cours.
[45] N.J. Newton. Variance reduction for simulated diusions. SIAM J. Appl. Math.,
54(6) :17801805, 1994.
[46] D. Nualart. The Malliavin Calculus and Related Topics. Springer Verlag, Berlin, 1995.
[47] D. Nualart. Analysis on wiener space and anticipating stochastic calculus. Lect. Notes
Math. 1690, Springer, Berlin, 1998.
[48] B. ksendal. An introduction to malliavin calculus with applications to economics.
Technical report, Lecture Notes from a course given 1996 at the Norwegian School of
Economics and Business Administration (NHH), NHH Preprint Series, 1996.
[49] G. Pages, V. Bally, and Printems. A stochastic optimisation method for nonlinear pro-
blems. Technical report number 02, University Paris XII, 2001.
[50] W. H. Press, Saul A. Teukolsky, W. T. Vetterling, and Brian P. Flannery. Numerical
recipes in C. Cambridge University Press, Cambridge, second edition, 1992. The art of
scientic computing.
72 BIBLIOGRAPHIE
[51] P. Protter. Stochastic Integration and Dierential Equations. Springer-Verlag, Berlin,
1990.
[52] D. Revuz and M. Yor. Continuous Martingales and Brownian Motion. Springer-Verlag,
Berlin, 1991.
[53] L. C. G. (ed.) Rogers and al., editors. Monte Carlo methods for stochastic volatility
models. Cambridge University Press., 1997.
[54] P. Seumen Tonou. Methodes Numeriques Probabilistes pour la
resolution dequations de transport et pour levaluation doptions exotiques. PhD thesis,
Universite de Provence, 1997.
[55] D. Talay. Discretisation dune e.d.s. et calcul approche d esperances de fonctionnelles
de la solution. Mathematical Modelling and Numerical Analysis, 20(1) :141179, 1986.
[56] D. Talay. Simulation and numerical analysis of stochastic dierential systems : a review.
In P. Kree and W. Wedig, editors, Probabilistic Methods in Applied Physics, volume 451
of Lecture Notes in Physics, chapter 3, pages 5496. Springer-Verlag, 1995.
[57] D. Talay and L. Tubaro. Expansion of the global error for numerical schemes solving
stochastic dierential equations. Stochastic Analysis and Applications, 8(4) :94120,
1990.
[58] E. Temam. Couverture doptions exotiques-Pricing des options asiatiques. PhD thesis,
Universite Paris VI, 2001.
[59] J.N. Tsitsiklis and B. Van Roy. Regression methods for pricing complex american-style
options. Working Paper, MIT :122, 2000.
You might also like
- Econométrie Var QualiDocument84 pagesEconométrie Var QualiHervé MUKADINo ratings yet
- Master 1 MMD - Séries Temporelles (Paris-Dauphine)Document196 pagesMaster 1 MMD - Séries Temporelles (Paris-Dauphine)L.CamoNo ratings yet
- Allag LiliaDocument105 pagesAllag Liliahajar elouadihNo ratings yet
- Cours Monte Carlo Michel ROGERDocument134 pagesCours Monte Carlo Michel ROGERPFENo ratings yet
- Thèse - Meriem KOUKI PDFDocument221 pagesThèse - Meriem KOUKI PDFRiadh AlouiNo ratings yet
- Eva BENROS, Solvabilité II Calibrage Des MCR-SCR Dans Le Contexte QIS4 SOLVENCY I & II + QIS 1.2.3.4 PDFDocument104 pagesEva BENROS, Solvabilité II Calibrage Des MCR-SCR Dans Le Contexte QIS4 SOLVENCY I & II + QIS 1.2.3.4 PDFHillel Adem BelaidiNo ratings yet
- Poly RegressionDocument127 pagesPoly RegressionmohamedNo ratings yet
- Régression Sous SASDocument144 pagesRégression Sous SASanibelsoulNo ratings yet
- ThA Se R Buda CorrigA e 15-02-11Document655 pagesThA Se R Buda CorrigA e 15-02-11Barthélemy HoubenNo ratings yet
- Couverture Des Risques Dans Les March Es Nanciers PDFDocument262 pagesCouverture Des Risques Dans Les March Es Nanciers PDFJurcelinho Axel IwangouNo ratings yet
- Value at RiskDocument153 pagesValue at RisksellaouiNo ratings yet
- Méthodes de Monte Carlo Et Chaînes de Markov Pour La SimulationDocument122 pagesMéthodes de Monte Carlo Et Chaînes de Markov Pour La SimulationbouhelalNo ratings yet
- ProjetDocument42 pagesProjetNadia ZoubirNo ratings yet
- d457 Inbrief FR PDFDocument6 pagesd457 Inbrief FR PDFJaffelNo ratings yet
- Poly Maths Fi S7Document63 pagesPoly Maths Fi S7hwl31No ratings yet
- Regles Et Procedures Nationales Du Burkina Faso en Matiere de GPDocument136 pagesRegles Et Procedures Nationales Du Burkina Faso en Matiere de GPDaoudygp7No ratings yet
- Memoire CHEN YanDocument106 pagesMemoire CHEN YanhayatmouNo ratings yet
- Le Rôle de La Cartographie Dans La Gestion Des Risques Technologiques en Milieu UrbainDocument8 pagesLe Rôle de La Cartographie Dans La Gestion Des Risques Technologiques en Milieu UrbainRudic DomencoNo ratings yet
- Probabilité & Statistique - 2 - Pour DEUG - Avner Bar-Hen 335pDocument335 pagesProbabilité & Statistique - 2 - Pour DEUG - Avner Bar-Hen 335pradoniainaNo ratings yet
- PDFDocument72 pagesPDFhuhuhNo ratings yet
- Maths Ing Fin PDFDocument271 pagesMaths Ing Fin PDFLëe PyNo ratings yet
- Theorie Des Jeux Poly ENPCDocument129 pagesTheorie Des Jeux Poly ENPCLhoucine EL Bourki100% (1)
- Modélisation Des Options Asiatiques Sur Le Taux de Change. Auteur: MARIANE Mouhammed, ENSAEDocument47 pagesModélisation Des Options Asiatiques Sur Le Taux de Change. Auteur: MARIANE Mouhammed, ENSAEmariane75% (4)
- ESLSCA Structurs ActionsDocument119 pagesESLSCA Structurs ActionsTarik LamzouriNo ratings yet
- Memoire Actuariat CEA AXA PDFDocument87 pagesMemoire Actuariat CEA AXA PDFbarakaNo ratings yet
- Modèle de Rentabilité D'un Produit de Prévoyance Dans Le Cadre de Solvabilité IIDocument122 pagesModèle de Rentabilité D'un Produit de Prévoyance Dans Le Cadre de Solvabilité IITamara KiddNo ratings yet
- Hadj Lazib - MelissaDocument118 pagesHadj Lazib - MelissaHadjout Said AissaNo ratings yet
- Elai Dies SadikDocument125 pagesElai Dies SadikBIDAOUI MOUHSSINENo ratings yet
- Cours Processus Et Calcul StochastiqueDocument79 pagesCours Processus Et Calcul StochastiqueFatima RafiiNo ratings yet
- M2 ExoDocument181 pagesM2 ExoStéphanie SablonNo ratings yet
- Guide Redaction MémoireDocument101 pagesGuide Redaction MémoireLouis-Marie Ndaw100% (1)
- Emprunts Obligataires Émis Par Les SociétésDocument18 pagesEmprunts Obligataires Émis Par Les SociétésChaymae Koualil100% (2)
- Mathématiques Des Marchés Financiers Modélisation Du Risque Et de L'incertitudeDocument203 pagesMathématiques Des Marchés Financiers Modélisation Du Risque Et de L'incertitudezakaria salhiNo ratings yet
- La Methodologie Detude Evenement 2022 AoutDocument9 pagesLa Methodologie Detude Evenement 2022 AoutAhmed SerrarNo ratings yet
- El KarouiDocument269 pagesEl KarouiaideogameNo ratings yet
- Poly StatDocument120 pagesPoly StatSerge GnamkeyNo ratings yet
- Loi Des Grands Nombres Et Theoreme Central LimiteDocument22 pagesLoi Des Grands Nombres Et Theoreme Central LimiteAnonymous Gh7ZPrNo ratings yet
- ProvisionnementDocument28 pagesProvisionnementWail AlaaNo ratings yet
- Ouvrage Panel 07 v2 3Document235 pagesOuvrage Panel 07 v2 3YamoudouNo ratings yet
- CalcSto15 16Document105 pagesCalcSto15 16Saleh TayyauiNo ratings yet
- Poly Son DageDocument82 pagesPoly Son DageFa KoNo ratings yet
- Que Descriptive Previsionnelle Techniques Enquetes SondageDocument60 pagesQue Descriptive Previsionnelle Techniques Enquetes SondageNabil KhayatNo ratings yet
- Recherche Opérationnelle Et Aide À La Décision - Cours Du Cycle B Du CnamDocument89 pagesRecherche Opérationnelle Et Aide À La Décision - Cours Du Cycle B Du CnamOmali wiam100% (1)
- VERSION FINALE - Etude - Sur - Carburant - CREAMDocument46 pagesVERSION FINALE - Etude - Sur - Carburant - CREAMfahasoavana burleighNo ratings yet
- Cycle Économique Et Cycle de CréditDocument117 pagesCycle Économique Et Cycle de CréditMaxime LOUARDINo ratings yet
- Revue de L'application Des Procédures de Gestion Du Risque Opérationnel Cas de L'activité BancaireDocument55 pagesRevue de L'application Des Procédures de Gestion Du Risque Opérationnel Cas de L'activité BancaireAbdo KarimNo ratings yet
- NEXTEER Automotive France - CIR 2014Document82 pagesNEXTEER Automotive France - CIR 2014otserlottNo ratings yet
- Methodes Quantitatives en FinanceDocument15 pagesMethodes Quantitatives en FinanceMohamed EladnaniNo ratings yet
- CP Controleur de Gestion PDFDocument1 pageCP Controleur de Gestion PDFSidy Semba DagnogoNo ratings yet
- Guide Rex PmeDocument36 pagesGuide Rex PmeStanislasNo ratings yet
- Directives volontaires sur le suivi des forêtsFrom EverandDirectives volontaires sur le suivi des forêtsNo ratings yet
- Acquisition, financement et cessions d'entreprises: Instruments financiers, structures d'acquisition et mécanismes de contrôle sous l'angle fiscal, comptable et financierFrom EverandAcquisition, financement et cessions d'entreprises: Instruments financiers, structures d'acquisition et mécanismes de contrôle sous l'angle fiscal, comptable et financierNo ratings yet
- Méthodes de Monte Carlo Pour La FinanceDocument72 pagesMéthodes de Monte Carlo Pour La FinanceNasserEddineBgNo ratings yet
- Cours M148Document46 pagesCours M148Brahim MohtaremNo ratings yet
- Modele de Monte Carlo en FinanceDocument103 pagesModele de Monte Carlo en Financeⵎⵓⵃⴰⵎⵎⴰⴷ ⵓⴷⴷⵓⵏⵉⵜNo ratings yet
- Proba Stat Fgi 2019 2020Document64 pagesProba Stat Fgi 2019 2020Junior NgoualadjoNo ratings yet
- (Cours) Econometrie HECDocument122 pages(Cours) Econometrie HECPascal GrangeonNo ratings yet
- Polyao 101Document109 pagesPolyao 101TrimakisNo ratings yet
- LecturenotesDocument80 pagesLecturenotesfle92No ratings yet
- Cours Analyse Numérique SMP3Document84 pagesCours Analyse Numérique SMP3medNo ratings yet
- Economie Monétaire Et FinancièreDocument296 pagesEconomie Monétaire Et FinancièreRajita EconomisteNo ratings yet
- Bureau TiqueDocument32 pagesBureau TiqueRajita EconomisteNo ratings yet
- Chapitre 1.L Entreprise Et Son EnvironnementDocument36 pagesChapitre 1.L Entreprise Et Son EnvironnementHaytham ElhamdadiNo ratings yet
- 01 - Management StratégiqueDocument19 pages01 - Management StratégiqueMeringue Galaxicos67% (3)
- Diminution de Taux DirecteurDocument1 pageDiminution de Taux DirecteurRajita EconomisteNo ratings yet
- Cours de Management GénéralDocument259 pagesCours de Management GénéralRajita EconomisteNo ratings yet
- Crises FinancieresDocument71 pagesCrises FinancieresRajita EconomisteNo ratings yet
- Fiche ValeurDocument9 pagesFiche ValeurAzemour MohamedNo ratings yet
- 3ème Partie Les Échanges Éxtérieurs 1 Fondements Théoriquesmesure Et Analyse Des Échanges Extérieurs 2 Bac SEDocument11 pages3ème Partie Les Échanges Éxtérieurs 1 Fondements Théoriquesmesure Et Analyse Des Échanges Extérieurs 2 Bac SERajita EconomisteNo ratings yet
- SSRN Id1080812Document27 pagesSSRN Id1080812Rajita EconomisteNo ratings yet
- 9 La Pratique Gestion Ressources HumainesDocument26 pages9 La Pratique Gestion Ressources HumainesRajita EconomisteNo ratings yet
- 4 InsuffisanceDocument0 pages4 InsuffisanceRajita EconomisteNo ratings yet
- 7 - DeveloppementDocument0 pages7 - DeveloppementRajita EconomisteNo ratings yet
- CGI Maroc 2013Document438 pagesCGI Maroc 2013foxzdNo ratings yet
- Économie GénéraleDocument54 pagesÉconomie GénéraleRajita Economiste0% (1)
- Article Fil Trede KalmanDocument22 pagesArticle Fil Trede KalmanRajita EconomisteNo ratings yet
- 2 - Le CircuitDocument0 pages2 - Le CircuitRajita EconomisteNo ratings yet
- 2ème Partie Lintervention de Letat La Politique Monétaire 2 Bac Science Economie Et Techniques de GestionDocument14 pages2ème Partie Lintervention de Letat La Politique Monétaire 2 Bac Science Economie Et Techniques de GestionRajita EconomisteNo ratings yet
- MemFE03 07 - LBO Financement Acquisition Des Entreprises - PHAM GARCIADocument178 pagesMemFE03 07 - LBO Financement Acquisition Des Entreprises - PHAM GARCIARajita EconomisteNo ratings yet
- Ddoc T 2012 0047 KouameDocument323 pagesDdoc T 2012 0047 KouameRajita EconomisteNo ratings yet
- Prevision EsithDocument80 pagesPrevision EsithAzed91No ratings yet
- Memoire Lbo en Difficulte Antoine PepinDocument94 pagesMemoire Lbo en Difficulte Antoine PepinRajita Economiste100% (1)
- Analyse Critique Du Système de Contrôle de Gestion de La BMCIDocument115 pagesAnalyse Critique Du Système de Contrôle de Gestion de La BMCIImane EmyNo ratings yet
- MPRA Paper 26980Document23 pagesMPRA Paper 26980Rajita EconomisteNo ratings yet
- Nicolas VassauxDocument156 pagesNicolas VassauxRajita EconomisteNo ratings yet
- Méthodologie Recherche Sciences de GestionDocument52 pagesMéthodologie Recherche Sciences de GestionLa Krizi Mohamed100% (1)
- AliouatDocument20 pagesAliouatRajita EconomisteNo ratings yet
- Analyse MicroeconomiqueDocument462 pagesAnalyse MicroeconomiqueRajita EconomisteNo ratings yet
- Nicolas VassauxDocument156 pagesNicolas VassauxRajita EconomisteNo ratings yet
- Gestion Des Risques de Taux D'intérêt Et de ChangeDocument427 pagesGestion Des Risques de Taux D'intérêt Et de ChangeRajita Economiste67% (3)
- Econometrie TP Accidents de La RouteDocument25 pagesEconometrie TP Accidents de La RoutePaul kadgaNo ratings yet
- Méthode de TAGUCHIDocument28 pagesMéthode de TAGUCHIadel-jamilaNo ratings yet
- GenieIndustriel PDFDocument134 pagesGenieIndustriel PDFiraoui jamal (Ebay)No ratings yet
- Chap 3Document6 pagesChap 3the JockerNo ratings yet
- Séance 4 - Modèle À Erreurs ComposéesDocument52 pagesSéance 4 - Modèle À Erreurs ComposéesayoubhaouasNo ratings yet
- Stat 1Document1 pageStat 1Firas KACHROUDINo ratings yet
- LaneDocument50 pagesLaneSinyanje Hyacinthe JordanNo ratings yet
- Examen Janvier 22Document5 pagesExamen Janvier 22Zarrouk MohamedNo ratings yet
- MethStatL2 - Exercices - CopieDocument19 pagesMethStatL2 - Exercices - CopiesabrineNo ratings yet
- TD4 Echantillonnage Et EstimationDocument2 pagesTD4 Echantillonnage Et EstimationIlyasse Bou-oudiNo ratings yet
- Exercices Corrigés SMDocument31 pagesExercices Corrigés SMVICO YTNo ratings yet
- cc2 Stat1 2021 2022Document1 pagecc2 Stat1 2021 2022AYMEN MOUFIDNo ratings yet
- Estimation Et Prévision Par IntervalleDocument23 pagesEstimation Et Prévision Par IntervalleBe-PositiveNo ratings yet
- Cours Statistique Mathematique Laoudj Version Finale 19 Janvier 2016Document80 pagesCours Statistique Mathematique Laoudj Version Finale 19 Janvier 2016YounessElkarkouri67% (3)
- Stat3 Serie3 S3Document2 pagesStat3 Serie3 S3FIRDAOUS SLIMANINo ratings yet
- Formulaire ECSDocument40 pagesFormulaire ECSErromayssae Majda100% (1)
- Statistiques BayésiennesDocument16 pagesStatistiques BayésiennesMSaadi100% (1)
- Ectx II L3 ch8 2014-15Document44 pagesEctx II L3 ch8 2014-15Boureima PARENo ratings yet
- Cours 2Document104 pagesCours 2vcklthgcghjlcNo ratings yet
- Chapitre 4 - Statistique InferentielleDocument37 pagesChapitre 4 - Statistique InferentielleKhadijetou ThiamNo ratings yet
- Exos STA230Document60 pagesExos STA230Abidi Hichem100% (1)
- Estimateur Ponctuel Et Qualités DestimateursDocument26 pagesEstimateur Ponctuel Et Qualités DestimateursAnis DjemelNo ratings yet
- Cours Introduction À L'econométrieDocument95 pagesCours Introduction À L'econométriegondodiesamesperanceNo ratings yet
- Exos Rappels Stats EnsaeDocument64 pagesExos Rappels Stats EnsaePierreEustacheNo ratings yet
- Cours BayesDocument40 pagesCours BayesIsmail DrissNo ratings yet
- Se1 1 Introduction Web PDFDocument40 pagesSe1 1 Introduction Web PDFDanil LebedevNo ratings yet
- TD CorrigéDocument69 pagesTD CorrigéMohamed100% (4)
- Plans Factoriels Complets À Deux NiveauxDocument30 pagesPlans Factoriels Complets À Deux NiveauxMh St50% (2)
- Analysis Methods For Fractional Brownian Motion: Theory and Comparative ResultsDocument18 pagesAnalysis Methods For Fractional Brownian Motion: Theory and Comparative ResultsDIYA seraicheNo ratings yet
- Polycope2021 1Document100 pagesPolycope2021 1mayssara nejmiNo ratings yet