You might also like
- Discrete Wavelet Transform: A Signal Processing ApproachFrom EverandDiscrete Wavelet Transform: A Signal Processing ApproachRating: 5 out of 5 stars5/5 (2)
- Hyrdoacoustic Ocean Exploration: Theories and Experimental ApplicationFrom EverandHyrdoacoustic Ocean Exploration: Theories and Experimental ApplicationNo ratings yet
- Switched-Capacitor Filters: - "Analog" Sampled-Data FiltersDocument24 pagesSwitched-Capacitor Filters: - "Analog" Sampled-Data FiltersPushpendra DwivediNo ratings yet
- Introduction To Filters: First-Order RC Filter (LPF1)Document13 pagesIntroduction To Filters: First-Order RC Filter (LPF1)Pushpendra DwivediNo ratings yet
- PracticeProbs (5 - 27 - 07) - CMOS Analog ICs PDFDocument70 pagesPracticeProbs (5 - 27 - 07) - CMOS Analog ICs PDFmyluvahanNo ratings yet
- Implementation Issues: - Component Spread - Sensitivity - Tuning - Noise - Finite Gain - Finite BandwidthDocument3 pagesImplementation Issues: - Component Spread - Sensitivity - Tuning - Noise - Finite Gain - Finite BandwidthPushpendra DwivediNo ratings yet
- Higher Order Filter Options: - Cascade of BiquadsDocument14 pagesHigher Order Filter Options: - Cascade of BiquadsPushpendra DwivediNo ratings yet
- PLLTutorial ISSCC2004Document131 pagesPLLTutorial ISSCC2004Siddharth MathurNo ratings yet
- 350 NC 7Document36 pages350 NC 7Malou Ruiz DenolanNo ratings yet
- Devices and Circuits Ii: Lecture GoalsDocument4 pagesDevices and Circuits Ii: Lecture GoalsMạnh Cường TrầnNo ratings yet
- Electronic Devices and Circuits Formula SheetDocument6 pagesElectronic Devices and Circuits Formula Sheetmumsn83% (6)
- CAD - Slides 06 PDFDocument69 pagesCAD - Slides 06 PDFKyogbsyNo ratings yet
- Non-Idealities of Switched Capacitor Filter DesignDocument19 pagesNon-Idealities of Switched Capacitor Filter Designhariprasath_vNo ratings yet
- Ele242 Course Material Chapter 3Document21 pagesEle242 Course Material Chapter 3lkjhNo ratings yet
- 9311 - CMOS Analog Design Chapter 10Document23 pages9311 - CMOS Analog Design Chapter 10raju.kprr8862No ratings yet
- 1 bfp640Document9 pages1 bfp640عبدالله أبورويصNo ratings yet
- Case Study UttuDocument6 pagesCase Study UttuSarthak GautamNo ratings yet
- Digital Audio EffectsDocument111 pagesDigital Audio EffectsshervinshNo ratings yet
- SSB Generation and TransmittersDocument14 pagesSSB Generation and TransmittersLingga TanuwidjajaNo ratings yet
- Files 3-Lesson Notes Lecture 17Document6 pagesFiles 3-Lesson Notes Lecture 17kingboyNo ratings yet
- Assignment 14Document3 pagesAssignment 14TanojNo ratings yet
- BwEE2601-13 - BJT and FET Frequency ResponseDocument15 pagesBwEE2601-13 - BJT and FET Frequency ResponseHoa LeNo ratings yet
- Frequency Modulation: Analog and Digital Communications Autumn 2005-2006Document16 pagesFrequency Modulation: Analog and Digital Communications Autumn 2005-2006Mulugeta AshangoNo ratings yet
- Chapter 16Document53 pagesChapter 16morrisjrlNo ratings yet
- T2 SolutionDocument3 pagesT2 SolutionsadyehclenNo ratings yet
- Didactic DC/DC Buck Converter: With Discrete PID ControllerDocument14 pagesDidactic DC/DC Buck Converter: With Discrete PID ControllerJuan DetemNo ratings yet
- Kunci Jawaban UAS EL2193 Set ADocument2 pagesKunci Jawaban UAS EL2193 Set Abagus_primadanaNo ratings yet
- Lecture 10Document22 pagesLecture 10mkrasanNo ratings yet
- Analog Lect 21 17032012Document17 pagesAnalog Lect 21 17032012Angad SehdevNo ratings yet
- Product Profile: NPN 9 GHZ Wideband TransistorDocument14 pagesProduct Profile: NPN 9 GHZ Wideband TransistorIelupokkiNo ratings yet
- Chapt14Prob41 60Document11 pagesChapt14Prob41 60oriontheoneNo ratings yet
- Delta Sigma ADCDocument22 pagesDelta Sigma ADCAlexandre KennedyNo ratings yet
- Sieget-Bfp 420Document8 pagesSieget-Bfp 420Kieutrang NguyenNo ratings yet
- Problem Solutions: V S SC Ts Vs SC R Ts SRCDocument37 pagesProblem Solutions: V S SC Ts Vs SC R Ts SRCLuis AntonioNo ratings yet
- SwitchCap UnderstandingDocument28 pagesSwitchCap UnderstandingRajeev JainNo ratings yet
- Devices and Circuits Ii: Lecture GoalsDocument5 pagesDevices and Circuits Ii: Lecture GoalsMạnh Cường TrầnNo ratings yet
- Case Study AayuDocument6 pagesCase Study AayuSarthak GautamNo ratings yet
- Chapter 7 - Frequency ResponseDocument47 pagesChapter 7 - Frequency ResponseFakrul HanifNo ratings yet
- Frequency Modulation: Analog and Digital Communications Autumn 2005-2006Document16 pagesFrequency Modulation: Analog and Digital Communications Autumn 2005-2006VipulJainNo ratings yet
- BJT and JFET Frequency ResponseDocument31 pagesBJT and JFET Frequency ResponseMohd Akmal MahfarNo ratings yet
- LRFD Steel BeamDocument30 pagesLRFD Steel Beam정영철No ratings yet
- Single-Amplifier-Biquad (SAB) Filter Sections: ESE319 Introduction To MicroelectronicsDocument27 pagesSingle-Amplifier-Biquad (SAB) Filter Sections: ESE319 Introduction To MicroelectronicsAnimesh JainNo ratings yet
- Phase-Locked Loops: David Johns, Ken Martin University of TorontoDocument26 pagesPhase-Locked Loops: David Johns, Ken Martin University of TorontokamarajvlsiNo ratings yet
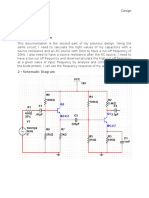
- Circuit Description: Cenita, Villy Joi M. Design #2 Bsece / 3 Year 3ECE-ADocument9 pagesCircuit Description: Cenita, Villy Joi M. Design #2 Bsece / 3 Year 3ECE-AVilly CenitaNo ratings yet
- Lecture 070 - Single-Stage Frequency Response - I: (READING: GHLM - 488-504) ObjectiveDocument6 pagesLecture 070 - Single-Stage Frequency Response - I: (READING: GHLM - 488-504) ObjectiveVan Nguyen Huu VanNo ratings yet
- 2006 ISRO ECE Question Paper PDFDocument19 pages2006 ISRO ECE Question Paper PDFKD0% (1)
- ECE 410 Homework 6 - Solution Spring 2008Document4 pagesECE 410 Homework 6 - Solution Spring 2008murthyNo ratings yet
- HW5 Fall 2007 EEE481&581 SolutionDocument10 pagesHW5 Fall 2007 EEE481&581 SolutionUmit GudenNo ratings yet
- Bataan Peninsula State University - Main Campus College of Engineering and ArchitectureDocument5 pagesBataan Peninsula State University - Main Campus College of Engineering and ArchitectureRAF REYKOONS SIMBULNo ratings yet
- Answer:: Question 1 (2 Points)Document3 pagesAnswer:: Question 1 (2 Points)oke dmm50% (2)
- Chapter 6 Digital ModulationDocument43 pagesChapter 6 Digital ModulationMohamed FahmyNo ratings yet
- FA19 BEE 023lab8Document7 pagesFA19 BEE 023lab8Atyia JavedNo ratings yet
- Filter Design 1Document31 pagesFilter Design 1sadyehclenNo ratings yet
- BC108 107 DatasheetDocument7 pagesBC108 107 DatasheetBagaz FelixNo ratings yet
- CDS 101, Lecture 9.2 R. M. Murray, CaltechDocument7 pagesCDS 101, Lecture 9.2 R. M. Murray, Caltechtidjani86No ratings yet
- Part 04-AmplifierDocument25 pagesPart 04-AmplifierMahmoud AbuziadNo ratings yet
- Computational Liquid Crystal Photonics: Fundamentals, Modelling and ApplicationsFrom EverandComputational Liquid Crystal Photonics: Fundamentals, Modelling and ApplicationsNo ratings yet
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Using-Dev-CDocument11 pagesUsing-Dev-CigoysinghNo ratings yet
- Programming With WxDec-C++Document155 pagesProgramming With WxDec-C++Pushpendra DwivediNo ratings yet
- Field Marshal Sam Manekshaw On LeadershipDocument9 pagesField Marshal Sam Manekshaw On LeadershipPushpendra Dwivedi100% (1)
- ESE Instructions 2011Document22 pagesESE Instructions 2011Pushpendra DwivediNo ratings yet
- Design of Stable IIR Digital Filters With Specified Group Delay ErrorsDocument6 pagesDesign of Stable IIR Digital Filters With Specified Group Delay ErrorsPushpendra DwivediNo ratings yet
- Administrative: Analog-Digital Interface Integrated Circuits © 2002 Bernhard E. BoserDocument7 pagesAdministrative: Analog-Digital Interface Integrated Circuits © 2002 Bernhard E. BoserPushpendra DwivediNo ratings yet
- N M) Is Given By: Nu) ) ), 'RALPDocument4 pagesN M) Is Given By: Nu) ) ), 'RALPPushpendra DwivediNo ratings yet
- Analog Filter SynthesisDocument19 pagesAnalog Filter SynthesisPushpendra DwivediNo ratings yet
- Lecture 4 Signal Encoding TechniquesDocument42 pagesLecture 4 Signal Encoding TechniquesListon KiwoliNo ratings yet
- Antenna Introduction 003Document46 pagesAntenna Introduction 003MariNo ratings yet
- Altai A3C - Indoor Dual-Band 3X3 802.11ac Wifi Ap: Altai Technologies Ltd. All Rights ReservedDocument2 pagesAltai A3C - Indoor Dual-Band 3X3 802.11ac Wifi Ap: Altai Technologies Ltd. All Rights ReservedRoyer Casaverde DiazNo ratings yet
- Advancing Trimble RTX Technology by Adding Beidou and GalileoDocument16 pagesAdvancing Trimble RTX Technology by Adding Beidou and GalileoarashNo ratings yet
- Manual Alvarion Breezenet B 6.0 System ManualDocument232 pagesManual Alvarion Breezenet B 6.0 System ManualhrusNo ratings yet
- With dimension-ATC-DMEDataSheetDocument2 pagesWith dimension-ATC-DMEDataSheethanie.zomorodiNo ratings yet
- Guide To Wireless Communications 4th Edition Olenewa Solutions ManualDocument13 pagesGuide To Wireless Communications 4th Edition Olenewa Solutions Manualsonemmanuelix83ua100% (22)
- DCN Over VlanDocument14 pagesDCN Over VlanHedi PrimaNo ratings yet
- Memorandum Circular No. 03-08-2012Document20 pagesMemorandum Circular No. 03-08-2012gregkilatonNo ratings yet
- Uplink, Downlink and Overall Link Performance: - Types of LinksDocument128 pagesUplink, Downlink and Overall Link Performance: - Types of LinksMarlon Xavier Aguirre CarchiNo ratings yet
- Broadcast CommunicationDocument14 pagesBroadcast CommunicationJuvie GargarNo ratings yet
- Huawei 1403794073312 ERAN TDD 7 0 RRU3259 DescriptionDocument8 pagesHuawei 1403794073312 ERAN TDD 7 0 RRU3259 DescriptionOGADUSNENo ratings yet
- Applications: Advanced ET/APT-MIPI MMPADocument1 pageApplications: Advanced ET/APT-MIPI MMPAMohamed B AliNo ratings yet
- EE1 and ISE1 Communications I: Pier Luigi Dragotti Lecture ThirteenDocument11 pagesEE1 and ISE1 Communications I: Pier Luigi Dragotti Lecture Thirteenعلي كامل الاسديNo ratings yet
- Pointer CeptDocument4 pagesPointer CeptJosé AlbertoNo ratings yet
- Progress in Electromagnetics Research B, Vol. 16, 229-245, 2009Document17 pagesProgress in Electromagnetics Research B, Vol. 16, 229-245, 2009Mohamed Ali JèbriNo ratings yet
- Examples For Hamming CodeDocument3 pagesExamples For Hamming Codequan118No ratings yet
- PDP Activation Failed Possible Root CauseDocument21 pagesPDP Activation Failed Possible Root CausesekhoholatauNo ratings yet
- HemisphereGNSS A325 DataSheet 12Document2 pagesHemisphereGNSS A325 DataSheet 12edicson ramos hurtadoNo ratings yet
- E-Wave Networks (P) LTD.: (An Iso 9001:2008 Certified Telecom Company)Document8 pagesE-Wave Networks (P) LTD.: (An Iso 9001:2008 Certified Telecom Company)Mohan JhaNo ratings yet
- Ac Ramesh PDFDocument256 pagesAc Ramesh PDFeshwar_worldNo ratings yet
- Context of Cryptography: ConfidentialityDocument13 pagesContext of Cryptography: ConfidentialityAnay ShrivastavaNo ratings yet
- Kenwood TK-7102 (Manual de Servicio)Document39 pagesKenwood TK-7102 (Manual de Servicio)henry3783No ratings yet
- WPA Wifi Deployment GuidelinesDocument47 pagesWPA Wifi Deployment Guidelinesapi-3710188100% (1)
- MHA 850 MHZ DatasheetDocument3 pagesMHA 850 MHZ DatasheetDavid TesztNo ratings yet
- Vlsi and Signal ProcessingDocument1 pageVlsi and Signal ProcessingbhargavchantiNo ratings yet
- Home About Buy Jobs Hardware Software Support Training: (Back To Main Menu)Document43 pagesHome About Buy Jobs Hardware Software Support Training: (Back To Main Menu)davaNo ratings yet
- Multiple Access: An Engineering Approach To Computer NetworkingDocument59 pagesMultiple Access: An Engineering Approach To Computer NetworkingVaigas ThiruvananthapuramNo ratings yet