
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- شعب بانک رسالتDocument2 pagesشعب بانک رسالتarash501No ratings yet
- ریاضیاتDocument17 pagesریاضیاتarash501No ratings yet
- Hydrodynamic Maneuverability Data of A Flatfish Type AUVDocument7 pagesHydrodynamic Maneuverability Data of A Flatfish Type AUVarash501No ratings yet
- Part 3 PDFDocument40 pagesPart 3 PDFarash501No ratings yet
- شاتونDocument2 pagesشاتونarash501No ratings yet
- Computation of KKT PointsDocument2 pagesComputation of KKT Pointsarash501No ratings yet
- An Experimental Study of Surface Waves Generated by Submerged BodiesDocument2 pagesAn Experimental Study of Surface Waves Generated by Submerged Bodiesarash501No ratings yet
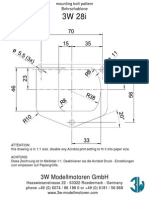
- 3w 028i 3wyguDocument1 page3w 028i 3wyguarash501No ratings yet
- Prous CeramicDocument11 pagesProus Ceramicarash501No ratings yet
- Uav CFD AnalysisDocument15 pagesUav CFD AnalysisRanjeet SinghNo ratings yet
- XFlow2014 FullFeatureListDocument4 pagesXFlow2014 FullFeatureListarash501No ratings yet
- Oral Arginine Does Not Stimulate An Increase in Insulin Concentration But Delays Glucose DisposalDocument7 pagesOral Arginine Does Not Stimulate An Increase in Insulin Concentration But Delays Glucose Disposalarash501No ratings yet
- Prous CeramicDocument11 pagesProus Ceramicarash501No ratings yet
- Aerodynamic CoefficientsDocument118 pagesAerodynamic Coefficientsarash501No ratings yet
- An Algorithm For The Numerical Solution by The Mesh Method of The Cylindrical Blast Problem, Allowing For Back PressureDocument19 pagesAn Algorithm For The Numerical Solution by The Mesh Method of The Cylindrical Blast Problem, Allowing For Back Pressurearash501No ratings yet
- اندازه گیری نویز پروانه دریایی در تونل کاویتاسیونDocument12 pagesاندازه گیری نویز پروانه دریایی در تونل کاویتاسیونarash501No ratings yet
- Wind Engineering Blade Element Theory: Lakshmi N Sankar Lsankar@ae - Gatech.eduDocument6 pagesWind Engineering Blade Element Theory: Lakshmi N Sankar Lsankar@ae - Gatech.eduarash501No ratings yet
- معادلات حاکم بر سیالDocument21 pagesمعادلات حاکم بر سیالarash501No ratings yet
- Exam of MITDocument3 pagesExam of MITarash501No ratings yet
- Exam of MITDocument3 pagesExam of MITarash501No ratings yet
- Backpressure Characteristics of Modern Three-Way Catalysts, Benefit On Engine PerformanceDocument9 pagesBackpressure Characteristics of Modern Three-Way Catalysts, Benefit On Engine Performancearash501No ratings yet
- Effects of L-Arginine Supplementation On Blood Flow, Oxidative Stress Status and Exercise Responses in Young Adults With Uncomplicated Type I DiabetesDocument9 pagesEffects of L-Arginine Supplementation On Blood Flow, Oxidative Stress Status and Exercise Responses in Young Adults With Uncomplicated Type I Diabetesarash501No ratings yet
- Modeling and Control of An Unmanned Underwater VehicleDocument119 pagesModeling and Control of An Unmanned Underwater Vehiclearash501No ratings yet
- 21st ITTC InternationalDocument3 pages21st ITTC Internationalarash501No ratings yet
- Introduction To Numerical Simulation of Fluid FlowsDocument44 pagesIntroduction To Numerical Simulation of Fluid Flowsarash501No ratings yet
- International Journal for Numerical Methods in Fluids Volume 42 issue 8 2003 [doi 10.1002_fld.563] R. M. Barron; Ali A. Salehi Neyshabouri -- Effects of under-relaxation factors on turbulent flow simulations.pdfDocument6 pagesInternational Journal for Numerical Methods in Fluids Volume 42 issue 8 2003 [doi 10.1002_fld.563] R. M. Barron; Ali A. Salehi Neyshabouri -- Effects of under-relaxation factors on turbulent flow simulations.pdfarash501No ratings yet
- Kinematics of Helical Motion of Microorganisms Capable of Motion With Four Degrees of FreedomDocument7 pagesKinematics of Helical Motion of Microorganisms Capable of Motion With Four Degrees of Freedomarash501No ratings yet
- CH3 Part2Document49 pagesCH3 Part2arash501No ratings yet
- 2008 06 19 MSS Vessel ModelsDocument25 pages2008 06 19 MSS Vessel Modelsthirumali muppurNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)























![International Journal for Numerical Methods in Fluids Volume 42 issue 8 2003 [doi 10.1002_fld.563] R. M. Barron; Ali A. Salehi Neyshabouri -- Effects of under-relaxation factors on turbulent flow simulations.pdf](https://imgv2-2-f.scribdassets.com/img/document/181951915/149x198/9497398f6b/1383720616?v=1)









































