Professional Documents
Culture Documents
YÖNEYLEM ARAŞTIRMASI - IST205U.pdf0 PDF
Uploaded by
ercan977Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
YÖNEYLEM ARAŞTIRMASI - IST205U.pdf0 PDF
Uploaded by
ercan977Copyright:
Available Formats
i
T.C. ANADOLU NVERSTES YAYINI NO: 2528
AIKRETM FAKLTES YAYINI NO: 1499
YNEYLEM ARATIRMASI-I
Yazarlar
Prof.Dr. Mjgan SAIR (nite 1, 4, 5)
Yrd.Do.Dr. Mahmut ATLAS (nite 2, 3)
Do.Dr. Nil ARAS (nite 6, 8)
Ar.Gr.Dr. Zehra KAMILI ZTRK (nite 7)
Editr
Prof.Dr. B. Fethi EN
ANADOLU NVERSTES
iii
indekiler
nsz .... iv
1. Yneylem Aratrmasna Giri 2
2. Dorusal Programlama. 14
3. Dorusal Programlama Modellerinin zm: Grafik zm Teknii 38
4. Simpleks Algoritmas 68
5. Duyarllk Analizi. 92
6. killik (Dualite).. 116
7. Hedef Programlama 146
8. Ulatrma ve Atama Modelleri. 170
iv
nsz
Karar vermek, yamz ve mesleimiz ne olursa olsun hayatn her aamasnda, sayamayacamz kadar
ok defa kar karya kaldmz bir ilemdir. Ne giyeceiniz, neye yatrm yapacanz, ocuunuzun
hangi okula devam edecei, kariyerinizi nasl planlayacanz, hangi tedariki ile alacanz, hangi
kargo ile iletilerinizi gndereceiniz, hangi servis salaycs ile alacanz, hangi lisansst programa
kayt olacanz, hangi marka buzdolab alacanz, yemeinizle hangi iecei sipari edeceiniz,
demenizi kredi kart ile mi pein mi yapacanz
Meslek yaantlarnda da insanlar hemen her an karar vermek durumundadrlar.
u marka hammaddeyi mi kullansak, yoksa bunu mu?
On tane mi retsek, sekiz mi yoksa oniki mi?
Ka tane sat ubesi asak? Bu ubeleri hangi ehirlerin hangi semtinde asak daha iyi olur?
letmelerin lei bydke, seenek says arttka, ilemler karmaklatka; karardan etkilenen
kii ve kurum says da bal olarak artar ve yanl kararlarn maddi manevi bedeli daha da arlar. Bu
sebeple bylesi karmak karar problemleri ile yzleildiinde, deneyim ve sezgiler hala ok nemli
olmakla beraber, en doru karar verme srecinde, yetersiz kalabilmektedirler.
Yneylem Aratrmas, karar vericilerin bu tr srelerde, kendi deneyimlerinin yansra, ihtiya
duyabilecekleri bilimsel yntem ve teknikleri sunan ve uygulama olana veren bir bilim daldr.
Bu kitap, Yneylem Aratrmasna belirli bir lde giri salamak amacyla hazrlanmtr.
Konunun kuramsal ynnden ok, kapsad problem trleri ve zm yaklamlar rneklerle
tantlmtr. rneklerin olabildiince, dersin hedef kitlesine ve gelecekteki alma alanna uygun
olmasna zen gsterilmitir.
nitelerde yer verilen rneklerin dikkatlice incelenmesi, karlalan sorulara yant vermeye
allmas ve nite sonlarnda yer alan yant anahtarlaryla karlatrlmas, konularn daha iyi
kavranmasna katk salayacaktr.
nitelerin anlatm ve sunumu konusunda trl isteklerimizi karlamak iin aba gsteren tm
yazarlarmza teekkr etmeyi zevkli bir grev sayyorum.
Editr
Prof.Dr. B. Fethi EN
2
Amalarmz
Bu niteyi tamamladktan sonra;
Yneylem Aratrmasnn ortaya kn ve geliimini aklayabilecek,
Yneylem Aratrmasnn temel zellii olan sistem yaklam, disiplinleraras yaklam ve
btnleik yaklam aklayabilecek,
Model kavramn tamamlayabilecek,
Yneylem Aratrmas snfna giren problem trlerini ifade edebilecek,
Dorusal ve dorusal olmayan programlama trlerini aklayabilecek
Yneylem Aratrmas tekniklerinin kullanm alanlarn ifade edebilecek
bilgi ve becerilere sahip olabilirsiniz.
Anahtar Kavramlar
Yneylem Aratrmas
Model
Dorusal Programlama
Dorusal Olmayan Programlama
Sistem Yaklam
Disiplinleraras Yaklam
Btnleik Yaklam
indekiler
Giri
Yneylem Aratrmasnn Temel zellii
Yneylem Aratrmas Yaklam
Model, Karar Modeli
Dorusal ve Dorusal Olmayan Programlama
Yneylem Aratrmas Teknikleri ve Kullanm Alanlar
1
3
GR
Yneylem Aratrmasnn douu II. Dnya Sava yllarndaki askeri uygulamalara dayandrlmakla
birlikte, 1911lerde Frederick Taylorun yaynlad Bilimsel Yntemin lkeleri almasnn da aslnda bu
bilim dalnn kklerini oluturduu sylenebilir.
II. Dnya Sava yllarnda, ngiliz askeri birimlerinde radarlarn etkili kullanm, denizaltlarn
yerlerinin belirlenmesi gibi problemlerin zmnde farkl bilim dallarndan oluan ekiplerle
allmtr. zleyen yllarda Amerika Birleik Devletlerinde Amerikan ekonomisi iin gelitirilen bir
endstriler aras girdi-kt modeli de yine birden fazla aratrmacdan oluan bir ekiple ele alnmtr. Bu
ekipte yer alan George B. Dantzig bu tr problemlerde, tanmlanan bir ama fonksiyonu ile eniyi
programlarn yaplabilecei dncesini savunmu ve ayrca dorusal programlama problemleri iin
bilinen Simpleks Algoritmasn gelitirmitir.
Yllar ierisinde Yneylem Aratrmas, rgtlerin ve/veya sistemlerin tasarmnda, kuruluunda ve
iletilmesinde karlalan planlama, yrtme ve kontrol faaliyetlerine bilimsel yntemlerle katkda
bulunan ve bu alanlardaki problemlere zm arayan bir bilim dal olarak yerini almtr. Matematik,
zm tekniklerinin altnda yatan temel bilimdir. Matematiin, bu blmde yer verilen ve Yneylem
Aratrmasn karakterize eden modelleme, yntembilim vb. zellik ve yaklamlarla birlikte ele aln
biimi ynyle, Yneylem Aratrmas, bir sanat olarak da grlmektedir. zm srecinde kullanlan
yaklam, problemi ve ardndan zm seeneklerini ortaya koyma, daha sonrada eniyi seenei uygun
yntemle belirleme aamalarndan oluur. Birden fazla seenek zm szkonusu deilse, bir problem de
yok demektir. Buna bir rnek u ekilde verilebilir: Bir doal afet durumunda, lkenin, afetin yaand
blgelerine ulatrlacak yardmn hangi yolla yaplacana karar verilmek istensin. Yardm ulatrmann o
anki koullarda tek yolu havadan ulam ise, kara yolu ve denizyolu szkonusu deilse, rnein
denizyolu corafi olarak mmkn olmayp, karayolu da tahrip olmu ve kullanlamaz ise, en iyi seenein
hangisi olduu gibi bir problem szkonusu deildir ve tek ulam seenei hava yoludur. Fakat hem hava
yolu, hem karayolu ile ulam mmkn ise o durumda hangi seenein daha iyi olduu sorusu gndeme
gelir. Bu durumda Yneylem Aratrmas yntemleri ile eniyi seenee karar vermek mmkn olur.
Problem, ancak zmnde alternatif yollar varsa vardr.
Bu nitede yukarda ok genel olarak aklanan Yneylem Aratrmasnn; temel zellikleri, problem
zmlerinde izledii yaklam ve hangi tr problemlerin zmnde kullanlaca vb. konulara yer
verilecektir.
YNEYLEM ARATIRMASININ TEMEL ZELL
Yneylem Aratrmasnn temel zellii;
a. Bilimsel yntem,
b. Btnleik yaklam ve
c. Disiplinleraras yaklam
Yneylem
Aratrmasna Giri
4
eklindedir. Bilimsel yntem, basitce, problemlerin zmnde bilimsel bir yaklamn izlenmesini ifade
eder. Bu anlamda bilimsel yntem; incelenen problem veya olayla ilgili nce gzlem yaplmasn, sonra
bir hipotezin gelitirilmesini, ardndan bu hipotezin deneylerle snanmasn ve son adm olarak da
genellenmesini ierir. Ardndan geri bildirimler ve gerekliyse kontrollerle sistem zerinde gelitirmeler
devam edebilir. Btnleik yaklam, ele alnan problemin, ierisinde yer ald sistem ile birlikte tm
bileenleri ve boyutlaryla incelenmesidir. Birden fazla ve karlkl iliki iinde bulunan ve belirli bir
amaca ynelik olarak bir arada bulunan oluumlar (sistemler) ile karlaldndan, bu zellik sistem
yaklam olarak da ifade edilebilmektedir. Son olarak disiplinleraras yaklam ise, Yneylem
Aratrmas kapsamndaki problemlerin, farkl disiplinlerde yer alan uzmanlardan oluan bir ekiple
zlmesi anlamna gelmektedir.
Birlikte dnldnde bu zelliin, problem zm srelerine farkl bir sistematik yaklam
kazandrd grlebilmektedir.
Kavramlar daha iyi anlayabilmek iin aadaki rnei inceleyelim:
Bir iletme var olan depolarna yenilerini eklemek istemektedir. Her deponun yeri ve kapasitesi;
datm yapaca mterilere, bulunulan blgedeki talep byklne vb. gre deiecektir. Eniyi depo
yerine karar verebilmek iin iletmenin baz aratrmalar yapmas gerekmektedir. Depo ama maliyeti ile
ilgili olarak, dnlen blgelerdeki arazi-bina satnalma veya kira bedelleri, tahmin edilen talepler,
rnlerin depolara oradan da mterilere sevkiyatlarnn maliyetleri, bu sevkiyatlar srasnda
kullanlabilecek ara ve gzergahlarn belirlenmesi gibi farkl etkenler ve her biriyle ilgili farkl kararlar
szkonusudur. Bu konular bir araya geldiinde, farkl uzmanlk ve mevzuat bilgisi ayrca bilimsel
analizler gerektirdii ortaya kacaktr. Bir karar vericinin, bu tr nemli kararlarda rol oynayabilecek
tm bilgilere sahip olmas mmkn olamayacana gre, kendi alannda uzmanlk bilgisine sahip
farkl disiplinlerden kiilerin bir araya getirilmesi kanlmazdr.
Bu gibi konularda Yneylem Aratrmasnn disiplinleraras yaklam kendini gsterir. Problem
tm ynleriyle yeterince irdelendiinde, sistemi oluturan bileenlerin karlkl etkileimleri
grlebilecek, alacak depo yerinin ulalmas gereken mterilerin bulunduu noktalardan veya
szkonusu blgede yeni bir depo inas iin uyulmas gereken mevzuattan veya iletmenin elinde
bulunan, bu ie ayrlabilecek sermayeden bamsz olamayaca (btnleik yaklam) ortaya kacaktr.
Tm bu gereklilikler konusunda bir farkndalk; problemin nce adm adm tanmlanmas, daha sonra
sistematik bir yaklamla zm srecinin tasarlanmas (bilimsel yntem) aamalarn getirecektir.
YNEYLEM ARATIRMASI YAKLAIMI
Yneylem Aratrmas, problemleri, yukarda belirtildii gibi, disiplinleraras bir ekiple, bilimsel bir
yntemi izleyerek ve sistemi btnyle ele alarak zer. Bu temel zellikleri kullanan, ayn zamanda
Yneylem Aratrmas Yaklam da denen problem zme aamalar aadaki gibi zetlenebilir:
a. Problemin belirlenmesi
b. Gerekli verilerin elde edilmesi ve sistemin analiz edilmesi
c. Modelin gelitirilmesi
d. Modelden zm elde edilmesi, modelin geerliliinin snanmas
e. Modelin uygulanmas ve karar.
Problemin varlnn ortaya konmas ve doru tanmlanmas, zm srecinde en nemli aamadr.
Daha sonra ise problemin girdisi olabilecek ve yaand sistemden tretilebilecek verilerin, gerektii
lde ve gncel bir biimde elde edilmesi gerekir. Hangi tr verilere ihtiya duyulduu, ilgili sistemin
ayrntl analizi ile ortaya kabilir. Bunu izleyen aama, problemin zm iin gereken uygun modelin
gelitirilmesidir. Ksaca bir sistemin kendisi yerine onun gibi davranan edeeri eklinde ifade edilen
modellerin ok farkl ekillerde snflandrlmalar mmkndr. zleyen blmde, model, yansra
Yneylem Aratrmas kapsamnda daha yaygn kullanlan ve ihtiya duyulan karar modeli kavramlarna
yer verilmektedir. Yaklamn dier aamalarnda ise, gelitirilen modelin geerliliinin snanmas ve
uygulanmas admlar yer alr.
5
MODEL, KARAR MODEL
Model, bir sistemin kendisi yerine onun gibi davranan edeerine denir. Modeller farkl ekillerde
gruplanabilirler. Yaplarna gre modeller; uyuum, benzeim ve matematiksel olarak e ayrlrlar.
Uak simulatrleri, maket inaat projeleri uyuum modellerine birer rnektir. Bu tr modeller gerek
sistemin kltlm birer rneidirler. eitli diyagramlar, grafikler benzeim modelleri arasndadrlar.
Gerek sistem grnmnde olmayp, sistemdeki ilikileri temsil ederler. Bu rnekler zerinde
dnldnde, bir uak simlatr yardmyla, szkonusu uan, belirli koullarda hangi davran
biimlerini ortaya koyaca test edilebilir. Bu sayede insan hayatn tehlikeye atmadan ve doabilecek
byk bir maliyeti de nceden engelleyerek simlatr zerinde istenen testler yaplr. Benzer dnceyle,
bir bilgisayar program da bir eit model saylr.
Matematiksel model ise bir sistemin veya problemin matematiksel ifadelerle temsil edilmesidir. f =
ma denklemi bu anlamda bir matematiksel modeldir. m ktlesine sahip bir cismin belirli bir a ivmesine
maruz kaldnda oluacak olan f byklndeki kuvvetin ifadesidir. m, a ve f den herhangi ikisi
biliniyorsa, ncnn deeri bu iliki ile bulunabilir.
Karar sreci; problemi belirleme, seenekleri tretme ve eniyi seenei bulma admlarndan
oluur. Bir problem olup olmad, Giri blmnde de belirtildii gibi, problemin zm iin birden
fazla seenein olmas durumunda ortaya kar. te yandan ou durumda seenekleri belirlemek de
olduka zordur. Byle durumlarda problemin gereklilikleri ve deikenleraras ilikilerin matematiksel
fonksiyonlarla ifade edildii; bulunan zmlerden hangisinin seilecei kararnn ise bir baka
fonksiyonda yine bu seenek zmlerin ald deerler ile belirlendii, btnleik bir yap oluturulur.
Bu yapda deikenleraras ilikilerin gsterildii fonksiyonlara kst, kstlar salayan zmlerin
eniyisinin seimi iin kullanld belirtilen fonksiyona ise ama fonksiyonu denir. Kstlar ve ama
fonksiyonundan oluan bu tr yaplara karar modeli denir. Karar modelleri dorusal veya dorusal
olmayan zelliklerde olabilirler.
DORUSAL VE DORUSAL OLMAYAN PROGRAMLAMA
Pratik olarak tm kstlar ve ama fonksiyonu, her biri dorusal birer fonksiyon ise, bir baka deyile tm
fonksiyonlarda yer alan her bir terim birinci dereceden ifadelerden olumakta, iki deikenin arpm
veya bir deikenin ssnn olmad terimler yer almakta ise ilgili karar modeli dorusaldr denir.
rnek bir dorusal karar modeli aadaki gibi verilebilir:
kstlar altnda
Dorusal karar modeli gelitirilebilmesi iin baz zellikler vardr: Bunlar; belirlilik, oranllk,
toplanabilirlik ve blnebilirlik olarak sralanabilir. Belirlilik, problemde kullanlan parametrelerin
deerlerinin bilinmesi, blnebilirlik, karar deikenlerinin her reel deeri alabilmesi, oranllk,
karar deikenlerinin aldklar deere gre oluan katk ve kullanlan kaynak miktarnn deikenin deeri
ile doru orantl olmas, toplanabilirlik ise oluan katklarn toplanabilmesidir. Bu zellikler var ise
bir karar modeli dorusaldr. rnein yukardaki modelde oranllk, birinci karar deikeninin birim
deeri iin oluacak katk 3 ise, x
1
birimi iin bu katknn doru orantyla artp 3x
1
kadar olmas veya
birim kaynak kullanm
ise,
birim iin kaynak kullanmnn
kadar olmas; toplanabilirlik ise
ikinci deikenin x
2
birimi iin oluacak benzer katknn 5x
2
olup, iki deikenin oluturduu katklarn
(3x
1
+5x
2
) toplanabilmesidir. Belirlilik, problemde yer alan birim katklar, birim kaynak kullanmlar gibi
parametrelerin deerlerinin bilinmesi, blnebilirlik ise deikenlerin her reel deeri alabilmesidir.
Yukardaki zellikleri tamayan modellere dorusal deildir denir. Bir modelin tm fonksiyonlarnn
enaz bir teriminde sl ifadenin olmas (
gibi iki deikenin arpm veya
sl terimin
olmas) bu durum iin yeterlidir. Ayn zamanda karar deikenlerinin srekli deiken deil de tam sayl
olmas durumunda da dorusallk bozulur. rnek bir dorusal olmayan karar modeli aadaki gibi
verilebilir:
6
kstlar altnda
lk kstta iki deikenin arpm, ikinci kstta ise bir deikenin karesi bulunmaktadr.
Dorusal ve dorusal olmayan karar modellerinin zm iin farkl yaklamlar vardr. Fakat
dorusal karar problemlerinin eniyi zm bir u noktadadr (ileride aklanacaktr) ve bu tip modellerin
zmlerini bulmak, dorusal olmayanlara gre daha kolaydr.
Bir dorusal karar probleminin salamas gereken zellikler nelerdir?
Kara, ., (1985), Yneylem Aratrmasnn Yntembilimi, Anadolu
niversitesi Yaynlar No: 96, Eskiehir 1985.
Karar modeli nedir?
YNEYLEM ARATIRMASI TEKNKLER VE KULLANIM
ALANLARI
Yneylem Aratrmas teknikleri pek ok alanda uygulama olana bulabilir. Aslnda, tanmnda da
belirtildii gibi rgtlerin ve/veya sistemlerin tasarmnda, kuruluunda ve iletilmesinde karlalan
planlama, yrtme ve kontrol faaliyetlerine bilimsel yntemlerle katkda bulunan ve bu alanlardaki
problemlere zm arayan bir bilim dal olduu hatrlanrsa, Yneylem Aratrmas ile ilgili almalarn
ne kadar geni bir yelpazede yer alabilecei kolayca grlebilir. nk gnmzde hemen her sistemde;
tasarm, kurulu ve iletme aamalar yer alr. Gerek retim, gerek hizmet sektr olsun, yaayan her
birim bu tr karar problemleri ile kar karya kalr. Gnmz iletmelerinde, ayakta kalabilmek ve
rekabet edebilmek iin, verimlilik, kanlmaz bir gerekliliktir. Elde bulunan kaynaklarn, igcnn ve
en nemlisi zamann verimli kullanlmas, maliyetlerin drlmesi, eniyi yatrm kararlarnn alnmas,
sistemleri kurduktan sonra ileyilerinde de etkin bir kontrol ve planlama ile srekliliklerinin salanmas
ok nemlidir.
Yneylem Aratrmas kapsamna giren konular ve tekniklere bakldnda; retim planlama ve stok
kontrol, proje ynetimi, ulatrma ve atama, personel planlama ve izelgeleme gibi problemlerin;
dorusal, dorusal olmayan, tamsayl, rassal ve dinamik programlama genel yaklamlarnn yannda,
oyun teorisi, markov zincirleri, dal-snr algoritmas, MODI atlama ta, CPM-PERT, Macar Algoritmas,
Simpleks Algoritmas olarak adlandrlan eitli tekniklerle de zlebildii grlr. Her birisi farkl
problemlerin zm iin gelitirilen bu teknikler, problemlerin eniyi (optimum) zmlerini bulmak
amacyla kullanlrlar.
Baz rnekler vermek gerekirse; retim sektrnde faaliyet gsteren bir iletmenin, elinde bulunan
makine, malzeme ve igc olanaklarn amadan, gelecek belirli bir dnem iin retim plann yapmas
Yneylem Aratrmas kapsamnda zlebilecek problemler arasnda yer alabilir. retim plan baln
biraz daha amak gerekirse, rnein toplam sat karn enbyklemek iin planlama periyodu ierisinde
hangi rnden hangi miktarlarda retilmesi gerektii veya ilerin tamamlanma zamann enkklemek
ve mteriye en ksa zamanda sevkiyat yapabilmek iin hangi operatrn hangi tezgahda almas veya
hangi iin hangi tezgahta yaplmas gerektii bulunabilir. Yine benzer ekilde, talepteki ani deiikliklere
kar hazrlkl olmak iin, nceden, hangi rnlerden hangi seviyelerde stok bulundurulmas gerektii de
retim planlama ve stok kontrol kapsamnda yantlanmas gereken sorular arasnda yer alp hepsi eitli
Yneylem Aratrmas Teknikleri ile zlebilir.
7
Hizmet sektr asndan dnldnde, mteri beklemelerini en aza indirecek ve memnuniyeti
arttracak ekilde, ka tane servis personelinin olmas gerektii (bankalarda banko, marketlerde kasa
saylar), pazardaki pay arttrabilmek iin bir iletmenin izleyebilecei farkl reklam ve pazarlama
stratejilerinden hangisinin daha etkili olaca gibi karar problemleri Yneylem Aratrmas alma
konular arasndadr.
Ulatrma ve lojistik faaliyetleri asndan u tr rnekler vermek mmkndr: Bir iletmenin, rnlerinin
sevkiyatnda kullanaca ara filosunda yer alacak aralarnn tiplerini ve saylarn ya da mevcut
aralarnn rn sevkiyat srasnda izlemesi gereken rotalarn belirlemesi problemleri bu kapsamdadr.
Rota belirleme srecinde genellikle, en ksa yol bal olarak da en az tama maliyeti
amalanmaktadr. retim sektrnde faaliyet gsteren iletmeler iin depo byklkleri, depo saylar,
ayrca birden fazla retim iletmesi ve deponun olduu sistemler iin hangi iletmeden hangi depoya veya
hangi depolardan hangi mterilere datm yaplaca kararlar da Yneylem Aratrmas teknikleri
kullanlarak verilebilir.
zellikle son elli yldr byk lekli projelerde uygulanabilen Yneylem Aratrmas teknikleri
konusunda, GANTT Diyagram denen teknik en eskiler arasndadr. 1958de Amerikan Deniz Kuvvetleri
zel Projeler Blm tarafndan, PERT (Project Evaluation and Review Technique), hemen hemen ayn
zamanlara rastlayan Kritik Yol Yntemi ise (CPM-Critical Path Method), Dupont Kimyevi Madde
Fabrikasnda bakm onarm faaliyetlerine yardmc olmak zere gelitirilmitir. Bu teknikler ounlukla
zaman esasl faaliyetlerin programlanmas problemlerinde uygulanmaktadrlar. CPM-PERTde bir
projeye ait tm faaliyetler tanmlanr, aralarndaki ncllk-ardllk ilikileri belirlenir ve projeye ait bir
ebeke izilir. rnein bir inaatn temeli atlmadan birinci katnn ina edilmesi mmkn deildir. Temel
atma ilemi, ilk kata kma alt faaliyetinin bir ncldr veya bir sempozyum dzenleme etkinliinde,
sempozyum tarihlerini belirlemeden, ilk duyurular yapmak, duyurular yapmadan katlmclarn
kaytlarn almaya balamak mmkn deildir. Faaliyetler iin sreler ve maliyetler tahmin edilir.
Faaliyetlerin en erken ve en ge balama ve biti sreleri ile bolluklar hesaplanr. Projeye ait kritik yol
denen bir rota ortaya kar. Bina, yol, kpr ve baraj inaat gibi byk lekli projelerde de bu gibi
teknikler kullanlr. Bu teknikler bir defalk gerekletirilen byk projelerde, faaliyetlerin sistematik bir
ekilde planlanmasna, hangi faaliyetin proje toplam sresini geciktirmeden ne kadar ertelenebileceinin
belirlenmesine yardmc olur.
Bir dier benzer konu da ebeke modelleri olarak isimlendirilir. En ksa yol, enkk rten aa, en
byk ak gibi eitli alt alma alanlar vardr.
En ksa yol problemi, zellikle lojistik alannda veya haberleme ebekelerinde kullanlabilecek bir
takm yntemlerin gelimesine sebep olmutur. Otoyollarn yapmnda ya da yukarda belirtilen bir
lojistik firmasnn datm faaliyetlerinde izleyecei rotann belirlenmesinde, toplam mesafeyi
enkkleyecek ekilde gzergahlarn veya yol balantlarnn yaplmas bu yntemlerle salanabilir.
En kk rten aa problemi, rnein bir belediyenin bir ilesine bal kylere elektrik balants
yapmas konusunda, hangi kylere hangi kylerden elektrik gtrleceine karar vermek gerekir. Burada
balant yaplacak bir noktann kendisine en yakn herhangi bir noktadan elektrik almas mmkndr,
balant sonras da artk kendisi de en yakn komu kye elektrik verebilir. Problem sanki tm dallarna
eriilmek istenen bir aaca benzetilerek en kk rten aa olarak literatrde yerini alm, bir Yneylem
Aratrmas alma alandr.
Son olarak en byk ak, maddelerin bir ebeke zerinde bir noktadan dierine eniyi (en byk
ak salayacak) ekilde tanmas problemi ile ilgilenir. Su, petrol, gaz vb. maddelerin boru hatlarndan
tanmas, elektriin tanmas, haberleme sistemlerinde bilgi aknn salanmas ya da kargo
iletmelerinde mektuplarn alcya tanmas gibi problemler, bu kapsamda yer almaktadrlar.
Yneylem Aratrmas tekniklerinin kullanlabilecei lojistik
faaliyetlerine rnek veriniz.
8
zet
Yneylem Aratrmas, II. Dnya Sava
yllarnda domu, ilk uygulamalar askeri alanda
gereklemi, rgtlerin tasarm, kurulu ve
iletim aamalarnda karlalan nemli
problemler iin zm teknikleri sunan bir bilim
daldr.
Yneylem Aratrmas, rgtlerin ve/veya
sistemlerin tasarmnda, kuruluunda ve
iletilmesinde karlalan planlama, yrtme ve
kontrol faaliyetlerine bilimsel yntemlerle
katkda bulunur ve bu alanlardaki problemlere
zm arar. Yneylem Aratrmas kapsamnda,
bir problemin varlndan bahsedilebilmesi,
problemin zm iin birden fazla seenein
olmas durumunda szkonusudur. te yandan,
yukarda belirtilen snfa giren, ou stratejik
kararda ise seeneklerin tretilebilmesi ok da
kolay olmayabilmektedir. Bu durumda, sistemde
yer alan parametrelerin ve ilikilerin temsil
edildii bir yapya ihtiya duyulmaktadr.
Yneylem Aratrmas kapsamnda model denen
bu oluumlar ile, bir sistemin kendisi yerine
kendisi gibi davranan bir edeeri ortaya
konmaktadr. Bu edeer sistemin zm ile
probleme zm olabilecek seeneklerin
tretilmesi salanabilir.
Modeller farkl ekillerde snflandrlmaktadrlar.
Burada ele alnan snflama, modelleri; uyuum,
benzeim ve matematiksel olarak e
ayrmaktadr. Uak simlatrleri, maket inaat
projeleri uyuum modellerine birer rnektir. Bu
tr modeller gerek sistemin kltlm birer
rneidirler. eitli diyagramlar ve grafikler
benzeim modelleri arasndadrlar. Gerek sistem
grnmnde olmayp, sistemdeki ilikileri
temsil ederler. Matematiksel model ise bir
sistemin veya problemin, ierdii deikenler
aras ilikilerin, matematiksel ifadelerle temsil
edilmesidir. f = ma denklemi bu anlamda bir
matematiksel modeldir. m ktlesine sahip bir
cismin belirli bir a ivmesine maruz kaldnda
oluacak kuvvetin ifadesidir. Bu kavramlardan
herhangi ikisinin deerinin bilinmesi durumunda
ncsnn deeri, bu iliki ile bulunabilir.
te yandan, sistemi temsil eden matematiksel
model ile tretilen seeneklerin eniyisinin
belirlenmesi iin, bir deerlendirme fonksiyonu
kullanlmaktadr. Bu erevede, bir matematiksel
modelde deikenleraras ilikilerin gsterildii
fonksiyonlara kst, kstlar salayan noktalar
(zmler)n eniyisinin seimi iin kullanlan bu
deerlendirme fonksiyonuna da ama fonksiyonu
denir. Kst ve ama fonksiyonlar ile ifade
edildiinde elde edilen matematiksel modele
karar modeli denir. Karar modelleri dorusal
veya dorusal olmayan zelliklerde olabilirler.
erdii fonksiyonlarn tm dorusal
fonksiyonlar ise ve deikenler de srekli ise,
dorusal bir karar modeli ile kar karya
kalnr. Aksi halde, model, dorusal olmayan bir
yapdadr denir. Dorusal karar modeli
gelitirilebilmesi iin baz zellikler vardr:
Bunlar; belirlilik, oranllk, toplanabilirlik ve
blnebilirlik olarak sralanabilir. Belirlilik,
problemde kullanlan parametrelerin
deerlerinin bilinmesi, blnebilirlik, karar
deikenlerinin her reel deeri alabilmesi,
oranllk, karar deikenlerinin aldklar
deere gre oluan katk ve kullanlan kaynak
miktarnn deikenin deeri ile doru orantl
olmas, toplanabilirlik ise oluan katklarn
veya kaynak kullanmlarnn toplanabil-
mesidir.
Yneylem Aratrmasnn temel zellii
vardr. Bunlar bilimsel yntem, btnleik
yaklam ve disiplinleraras yaklam olarak
sralanabilir.
Bilimsel yntem, incelenen problem veya olayla
ilgili nce gzlem yaplmasn, sonra bir
hipotezin gelitirilmesini, ardndan bu
hipotezin deneylerle snanmasn ve son adm
olarak da genellenmesini ierir. Btnleik
yaklam, ele alnan problemin, ierisinde yer
ald sistem ile birlikte tm bileenleri ve
boyutlaryla incelenmesidir. Son olarak
disiplinleraras yaklam ise, Yneylem
Aratrmas kapsamndaki problemlerin, farkl
disiplinlerde yer alan uzmanlardan oluan bir
ekiple zlmesi anlamna gelmektedir. Birlikte
dnldnde bu zelliin, problem zm
srelerine farkl bir sistematik yaklam
kazandrd grlebilmektedir. Yneylem
Aratrmas almalarnda, bu temel zellik
kullanlarak, Yneylem Aratrmas Yaklam da
denen u problem zme aamalar kullanlr:
Problemin belirlenmesi, gerekli verilerin elde
edilmesi, sistemin analiz edilmesi, modelin
gelitirilmesi, modelden zm elde edilmesi,
modelin geerliliinin snanmas, modelin
uygulanmas ve karar.
9
Yneylem Aratrmas kapsamna giren konulara
bakldnda; retim planlama ve stok kontrol,
proje ynetimi, ulatrma ve atama, personel
planlama ve izelgeleme gibi pek ok problem;
dorusal, dorusal olmayan, tamsayl, rassal ve
dinamik programlama genel yaklamlarnn
yannda, oyun teorisi, markov zincirleri, dal-snr
algoritmas, MODI atlama ta, CPM-PERT,
Macar Algoritmas, Simpleks Algoritmas olarak
adlandrlan eitli tekniklerle zlebilmektedir.
Bu teknikler genellikle, problemlerin eniyi
(optimum) zmlerini bulmak amacyla
kullanlrlar.
Yneylem Aratrmas tekniklerinin kullanm
alanlarna daha ayrntl rnekler vermek
gerekirse unlar sylenebilir: rnein retim
sektrnde faaliyet gsteren bir iletme; elindeki
malzeme ve igc olanaklarn amadan, gelecek
belirli bir dnem iin retim plann yapmak
istediinde, toplam sat karn enbyklemek
iin planlama periyodu ierisinde hangi rnden
hangi miktarlarda retilmesi gerektiini veya
ilerin tamamlanma zamann enkklemek ve
mteriye en ksa zamanda sevkiyat yapabilmek
iin hangi operatrn hangi tezgahta almas
veya hangi iin hangi tezgahta yaplmas
gerektiini bulmak istediinde Yneylem
Aratrmas tekniklerinden yararlanabilir.
Teknikler, hizmet sektrnde de pek ok alanda
uygulama olana bulabilmektedir. rnein, bir
kargo firmasnn, ara filosunda yer alacak
aralarn tiplerine ve saylarna, bir retim
iletmesinin, aaca depolarn yerlerine ve
byklklerine, tamaclkta hava, deniz veya
kara yolu tama seeneklerine veya bunlarn bir
kombinasyonuna karar verirken eitli yntemler
kullanlabilir.
Proje planlama ve ebeke modelleri de Yneylem
Aratrmas alma konular arasndadr. Bu
konudaki teknikler; zellikle bina, yol, kpr ve
baraj inaat gibi byk lekli ve genellikle bir
defalk gerekletirilen byk projelerde,
faaliyetlerin sistematik bir ekilde planlanmasna,
hangi faaliyetin proje toplam sresini
geciktirmeden ne kadar ertelenebileceinin
belirlenmesine yardmc olurlar. ebeke
modelleri kapsamna giren konular ile ise;
zellikle lojistik sektrnde, datm
faaliyetlerinde izlenecek en ksa rotann
belirlenmesi veya maddelerin bir ebeke zerinde
bir noktadan dierine eniyi ekilde tanmas gibi
problemlere zm aranr. rnein su, petrol, gaz
vb. maddelerin boru hatlarndan tanmas,
elektriin tanmas, haberleme sistemlerinde
bilgi aknn salanmas, kargo iletmelerinde
mektuplarn alcya tanmas, yansra doalgaz
balants yaplan bir yerleim biriminden dier
komu yerleim birimlerinin hangilerine ve nasl
bir ala bir balant sistemi kurulacann
belirlenmesi gibi konularda zmler, bu
kapsamda yer alan tekniklerle bulunabilir.
Yneylem Aratrmas; problem zmlerinde
farkl disiplinlerden, yansra karar srecinde
bilimsel bir yntemden yararlanmas, pek ok
alanda ve ok eitli karar probleminde karar
vericiye yardmc olacak zm yntemleri
sunmas ynleriyle sistemlerin verimliliini
arttrmada nemli bir bilim daldr.
10
Kendimizi Snayalm
1. Aadakilerden hangisi Yneylem
Aratrmasnn temel zellii arasnda yer
alr?
a. Sistematik yntem
b. Modelleme
c. Disiplinleraras yaklam
d. Tasarlama
e. zmleme
2. Aadakilerden hangisi dorusal bir karar
modeli gelitirmek iin gereken zelliklerden
deildir?
a. Belirlilik
b. Saylabilirlik
c. Toplanabilirlik
d. Oranllk
e. Blnebilirlik
3. Hangi ifade dorusal olmayan bir yapya kar
gelmektedir?
a.
b.
c.
d.
e.
4. Hangi seenek, Yneylem Aratrmas
yaklamndaki aamalarn sralan iin en
uygunudur?
a. Problemin belirlenmesi, modelin
gelitirilmesi, zlmesi
b. Modelin gelitirilmesi, problemin
belirlenmesi, modelin uygulanmas
c. Modelin gelitirilmesi, verilerin elde edilmesi,
modelin uygulanmas
d. Modelin zlmesi, modelin uygulanmas,
verilerin analiz edilmesi
e. Verilerin analiz edilmesi, modelin
uygulanmas, modelin zlmesi
5. Aadakilerden hangisi bir uyuum modeline
rnektir?
a.
b. Ak emas
c. Uak simlatr
d.
e.
6. Aadakilerden hangisi bir benzeim
modeline rnektir?
a.
b. Ak emas
c. Uak simlatr
d.
e.
7. Aadakilerden hangisi doru deildir?
a. Yneylem Aratrmasnn douu II. Dnya
Sava yllarna dayanr.
b. lk almalar farkl disiplinlerden kiiler
tarafndan gerekletirilmitir.
c. Frederick Taylorun Bilimsel Yntemin
lkeleri almas da, ilk Yneylem
Aratrmas almalar arasnda nemli bir
yere sahiptir.
d. Yneylem Aratrmas almalar 1920lerde
nemli lde hzlanmtr.
e. Sistem yaklam Yneylem Aratrmasnn
temel zelliinden deildir.
8. Hangisi oranllk zelliini tanmlar?
a. Karar deikenlerinin aldklar deere gre
oluan katk ve kullanlan kaynak miktarnn,
deikenin deeri ile doru orantl olmas
b. Karar deikenlerinin her reel deeri
alabilmesi
c. Karar deikenlerinin deerlerine gre oluan
katklarn toplanabilmesi
d. Problemde yer alan parametrelerin
deerlerinin bilinmesi
e. Verilen problemde yer alan bir karar
deikeninin birim deerine karlk oluan
katk , baka bir karar deikeninin birim
deerine karlk oluan katk iken, iki
deikenin birlikte oluturaca katknn
olmasdr.
11
9. Hangisi Yneylem Aratrmasnn temel
zelliklerinden biri deildir?
a. Displinleraras yaklam
b. Paralel yaklam
c. Bilimsel yntem
d. Btnleik yaklam
e. Sistem yaklam
10. Aadakilerden hangisi dorudur?
a. Yneylem Aratrmas ile bir problemin
zm srecinde seenekler her zaman
kolayca tretilir.
b. Yneylem Aratrmas tekniklerinin daha ok
hizmet sektrnde kullanm yaygndr.
c. Bir problemin eniyi zmn bulmak,
Yneylem Aratrmas teknikleri ile her
zaman mmkndr.
d. Problemleri zen seenekler, her zaman
kolayca tretilemeyebilirler. Byle
durumlarda bazen, matematiksel modellerden
yararlanlabilir.
e. Yneylem Aratrmas, zel bilimsel alma
alanlarndaki bilgi birikiminden yararlanr,
fakat birden fazla disipline mensup
aratrmac veya uzmann birlikte almas
uygun bulunmaz.
Kendimizi Snayalm Yant
Anahtar
1. c Yantnz yanl ise Yneylem Aratr-
masnn Temel zellii balkl konuyu
yeniden gzden geiriniz.
2. b Yantnz yanl ise Dorusal ve Dorusal
Olmayan Programlama balkl konuyu yeniden
gzden geiriniz.
3. b Yantnz yanl ise Dorusal ve Dorusal
Olmayan Programlama balkl konuyu yeniden
gzden geiriniz.
4. a Yantnz yanl ise Yneylem Aratrmas
Yaklam balkl konuyu yeniden gzden
geiriniz.
5. c Yantnz yanl ise Model, Karar Modeli
balkl konuyu yeniden gzden geiriniz.
6. b Yantnz yanl ise Model, Karar Modeli
balkl konuyu yeniden gzden geiriniz.
7. d Yantnz yanl ise Yneylem Aratrma-
sna Giri balkl konuyu yeniden gzden
geiriniz.
8. a Yantnz yanl ise Dorusal ve Dorusal
Olmayan Programlama balkl konuyu yeniden
gzden geiriniz.
9. b Yantnz yanl ise Yneylem Ara-
trmasnn Temel zellii balkl konuyu
yeniden gzden geiriniz.
10. d Yantnz yanl ise Model, Karar Modeli;
Yneylem Aratrmasnn Temel zellii
balkl konular yeniden gzden geiriniz.
12
Sra Sizde Yant Anahtar
Sra Sizde 1
Dorusal karar problemlerinin salamas gereken
zellikler; belirlilik, blnebilirlik, oranllk ve
toplanabilirliktir.
Sra Sizde 2
Bir karar problemini zebilmek iin; problemde
yer alan ilikilerin, gerekliliklerin matematiksel
ifadelerle gsterildii ve alternatif zmlerin
deerlendirilmesi iin de yine matematiksel
deerlendirme fonksiyonlarnn tanmland,
btnleik gsterimlerdir.
Sra Sizde 3
Yneylem Aratrmas teknikleri lojistik
faaliyetlerin planlama ve kontrol aamalarnda
pek ok karar noktasnda kullanlabilir. rnein
bir nakliye irketi; ara filosunda yer alacak
aralarn saylarna, tiplerine veya mevcut
aralarnn sevkiyat srasnda izleyecei
gzergahlara bu tekniklerle karar verebilir.
Ayrca bir retim iletmesinin, aaca depolarn
yerlerini ve kapasitelerini belirlemek de yine
birer Yneylem Aratrmas problemi olarak
kabul edilebilirler.
13
Yararlanlan Kaynaklar
Kara, ., (2000), Dorusal Programlama, Bilim
Teknik Yaynevi, stanbul.
Kara, ., (1985), Yneylem Aratrmasnn
Yntembilimi, Anadolu niversitesi Yaynlar
No: 96, Eskiehir 1985.
Taha, H, (2003), Yneylem Aratrmas, 3.
Basm, (Baray . A., Esnaf . tarafndan eviri),
Literatr Yaynclk, stanbul.
Timor, M. (2010), Yneylem Aratrmas,
Trkmen Kitabevi, stanbul.
14
Amalarmz
Bu niteyi tamamladktan sonra;
Dorusal programlamay tanmlayarak, uygulama alanlarn listeleyebilecek,
Dorusal programlamann varsaymlarn aklayabilecek,
Karar deikeni ile tesadfi deiken ayrmn yapabilecek,
Dorusal programlama modelinin temel bileenlerini aklayabilecek,
Dorusal programlama modeli (retim, datm vb.) kurabilecek
bilgi ve becerilere sahip olabilirsiniz.
Anahtar Kavramlar
Dorusal Programlama
Ama Fonksiyonu
Karar Deikeni
Maksimum
Algoritma
Model
Matematiksel Model
Kstlayc
Minimum
Optimum
Karar Problemi
indekiler
Giri
Dorusal Programlamann Varsaymlar
Dorusal Programlamann Model Kurma
Dorusal Programlamann Model Kurma Uygulamalar
2
15
GR
Yneylem aratrmasnn en gelimi ve yaygn uygulama alann oluturan dorusal programlama,
dorusal karar problemleriyle ilgili kavram ve teknikler topluluudur. Bu blmde, nce dorusal
problemlerin matematiksel modellemesi anlatlp, sonra da rnek problemler ele alnp modellenecektir.
Dorusal programlama, belirli bir amaca ulamak iin, baz kstlayclar altnda kt kaynaklarn en
verimli ekilde kullanlmasn salayan bir matematiksel yntemdir. Bu ekilde varlmak istenen ama,
kr maksimizasyonu (en bykleme) veya maliyet minimizasyonu (en kkleme) olarak belirlenebilir.
Dorusal programlamada dorusal szc, fonksiyonlarn dorusalln, programlama ise planlama
ilemini ifade etmektedir. Dorusal programlama, tm uygun seenekler arasndan optimum (eniyi)
sonucun elde edilmesini salayan planlama faaliyetlerini iermektedir. Doal olarak byle bir
programlama srecinde, nce gerekli veriler toplanr, problem modellenir ve daha sonra modelin zm
aratrlr. Dorusal programlama modeli kurulurken amacn, deikenler arasnda ilikilerin ve
kullanlacak kt kaynaklarn tanmlanmas gerekir.
Gnmz sistemleri (retim, datm, vb.) byk sistemlerdir. Bu byk sistemlerin modelleri de ok
sayda deiken ve kstlaycdan olumaktadr. Byk modeller, bilgisayar yardmyla
zlebildiinden, dorusal programlamann uygulama alan sadece kt kaynaklarn datm ile snrl
kalmam, dier birok alanda da nemli uygulamalar ortaya konmutur. Dorusal programlamann
uygulama alanlar ile ilgili olarak aadaki liste verilebilir.
Ulatrma ve lojistik problemleri,
Endstriyel retim planlamas ve envanter (stok) kontrol
Personel programlamas
Beslenme(diyet) problemleri
Karm problemleri
Tarmsal planlama
Finansal planlama
Yatrm planlamas
Salk sistemleri
Askeri planlama
Trafik planlamas
Atama problemleri
Reklam seimi problemleri
Karm problemleri
Dorusal Programlama
16
letme ve iktisat bilim dallarn da yakndan ilgilendiren dorusal programlama, yneylem
aratrmasnda da en yaygn kullanlan aralardan birisidir. Geni bir uygulama alan olan dorusal
programlama, ayrca iletmelerin karlat darboazlarn giderilmesinde, kt kaynaklarn etkin
kullanm ve bunlarn glge fiyatlarnn belirlenmesi ile en uygun zmlere ulatracak politikalar
saptamada kullanlmaktadr.
Dorusal programlamann uygulama alanlar nerelerdir?
DORUSAL PROGRAMLAMANIN VARSAYIMLARI
Gerek hayatta karlalan ou karar problemi iin, en azndan uygun kabullerle, dorusal karar modeli
gelitirmek mmkndr. Bir problem iin karar modeli gelitirmek ve kurmak gerek sistemi
matematiksel olarak ifade etmek demektir. Bu ilem yaplrken bilgi kayb kanlmazdr. nemli olan
en az bilgi kayb ile dnm gerekletirebilmektir. Bu nedenle modelden tutarl sonular elde
edilebilmesi iin aadaki varsaymlar kabul edilmelidir.
Dorusallk (Oranllk) Varsaym
Bu varsaym modelin ama fonksiyonu ve kstlayc fonksiyonlar ile ilgilidir. Dorusallk varsaym,
iletmenin girdileri ile ktlar arasnda dorusal bir ilikinin olduunu gsterir. retim dzeyi artarken
ayn oranda retim girdileri de artar.
Eer, X
j
inci eylem iin amacn oluumu dorusallk zellii gsteriyorsa, X
j
nin her bir birim
deerinin kara katks c
j
iken, X
j
nin zm deerinin amaca katks c
j
X
j
kadar olur. Bunun yannda karar
problemine esas olan b
i
inci kaynaktan her bir birim X
j
iin gerekli kaynak miktar a
ij
olmak zere X
j
iin
kaynak gereksinimi a
ij
X
j
kadar olur. Kstlar ve ama fonksiyonu birinci dereceden fonksiyon olmaldr.
Aksi takdirde, dorusal olmayan programlama sz konusu olur.
Bu varsaym, her bir karar deikeninin; gerek ama fonksiyonu, gerekse tk kstlayclara etkisinin
sz konusu deikenin (X
j
) deeriyle doru orantl olmas gerektiinin ifade eder.
Karar deikenlerine kontrol edilebilen deikenler denir. statistikte
deiken X
i
-tesadfi deikendir ve serbeste deerler alabilen deiken olarak
tanmlanr.
Toplanabilirlik Varsaym
Dorusal programlamada her fonksiyon, ilikili olduu faaliyetlerin, bireysel katklarnn toplamdr.
Karar deikenlerine verilecek deerlere gre, her birinin salad katklar toplanp, toplam
katky, yani ama fonksiyonunu oluturuyorsa, toplanabilirlik varsaym geerlidir demektir. Bu
varsaym, kstlayclarn sol tarafndaki sabitler iin ele alrsak; deiik retim faaliyetlerine kaynak
olan, retim girdilerinin toplamnn, her bir ilem iin ayr ayr kullanlan girdilerin toplamna eit
olduunu gsterir.
Blnebilirlik Varsaym
Modelin karar deikenleri X
j
ler, her trl reel deerleri alabiliyorsa, blnebilirlik varsaym salanyor
demektir. Bylece, karar deikenleri, baz faaliyetlerin dzeyini gsterdiinden, faaliyetlerin kesirli
dzeylerde alabilecei varsaylr.
Bazen girdi ve ktlarn blnmezlik sorunu nedeniyle, karar deikenlerini tamamnn veya
bazlarnn tam say olmas gerekebilir. Byle durumlarda, tam sayl programlama sz konusu olur.
17
Belirlilik (Kesinlik) Varsaym
Dorusal programlama modelindeki tm parametrelerin (ama fonksiyonu katsaylar-c
j
, sa taraf
sabitleri-b
i
ve teknoloji katsaylar- a
ij
) biliniyor olduu varsaymdr. Parametre deerlerini kesin olarak
biliniyor olmas varsaym, modelin deterministtik model olduunun gstergesidir.
Bir problemde, karar deikenleri ve parametrelerle ilgili olarak; dorusallk, toplanabilirlik,
blnebilirlik ve belirlilik varsaymlar geerli ise bu problem dorusal programlama problemi olarak
modellenip zlebilir. Burada dikkat edilmesi gereken husus, problemin doru belirlenmesidir.
Parametre deerlerinden kesin deerleri bilinmeyenler iin tahmin yoluna gidilebilir. Daha sonra
matematiksel modelleme aamasna geilmelidir. Fakat modelin dorusallk ve blnebilirlik
varsaymlar, gerek dnyadaki ilikileri gzlemlendiinde bir eksiklik gsterdii sylenebilir.
Denilebilir ki, bu iki varsaym dorusal programlama yntemini kstlamaktadr.
Dorusal programlama modeli kurulurken hangi varsaymlar kabul
edilmektedir?
DORUSAL PROGRAMLAMADA MODEL KURMA
Model kelime anlam gerein benzeri demektir. Model kurma, sistemi oluturan unsurlarn
matematiksel terimlerle ifade edilmesidir. Baka bir deyile problem, matematik diline tercme edilir.
Model dorusal programlama gibi standart bir matematiksel model halinde ifade edilebiliyorsa, bilinen
algoritmalar yardmyla zme ulalabilir. Bir problemin, dorusal programlama modeli kurulurken
nce karar deikenleri tanmlanr, sonrada ama fonksiyonu ve kstlayclar formle edilir.
Algoritma: Problem zmnde izlenen yol olarak isimlendirilebilir.
Karar Deikenlerinin Belirlenmesi
Bir problemin dorusal programlama modelinin kurulmasna, ncelikle karar deikenlerinin
tanmlanmasyla balanr. Karar deikeni: bir problemde karar vericinin kontrol altnda olup da, deeri
aratrlan eylemler, karar deikenleridir. Herhangi bir dorusal programlama modelinde karar dei-
kenleri, alnacak kararlar tamamen betimlemelidir. Karar deikenleri, alnacak kararlara ilikin faali-
yetlerin dzeyini gstermektedir.
Karar deikenleri genellikle; X
j
sembol ile gsterilir.
X
j
: j inci rnden retilecek (veya tanacak) miktar anlamndadr. (j=1,2,.,n)
Ama Fonksiyonunun Belirlenmesi
Herhangi bir dorusal programlama probleminde karar verici, karar deikenlerinin baz fonksiyonunu
maksimum veya minimum yapmak ister. Maksimum veya minimum yaplmak istenen fonksiyona, ama
fonksiyonu ad verilir.
Dorusal programlama modelinden beklenen sonucun alnabilmesi iin, amacn ak olarak bilinmesi
ve nicel olarak yazlm gerekmektedir. Modelin ama fonksiyonu yazlrken;
Karar deikenleri: X
1
, X
2
, ..., X
n
Birim kr veya maliyet katsaylar c
1
,c
2
,.,c
j
,,c
n
ile gsterildiinde,
18
Ama fonksiyonu:
Max/Min Z = c
1
X
1
+ c
2
X
2
+ +c
j
X
j
+ + c
n
X
n
veya genel olarak
eklinde de yazlabilir.
Kstlayclarn Belirlenmesi
Ekonomide retim kaynaklar veya retim faktrleri snrldr. Bir iletmenin elindeki makine kapasitesi,
teknolojisi, igc, enerji, sermaye, hammadde, yar mamul madde, malzeme gibi retim faktrleri ile
rnlerine olan talep de snrldr. Dolaysyla karar deikenlerinin miktar da snrl olacaktr. nemli
olan, bu kstlayclar altnda ama fonksiyonunu salayan rnler retmektir.
letmenin faaliyetlerinde,
b
i
: iinci kaynak miktar(iinci kstn sa taraf sabiti), (i=1,2,3, m)
a
ij
: bir birim X
j
iin gerekli iinci kaynak miktar(X
j
lerin iinci ksttaki teknoloji katsaylar)
sembolleri ile gsterirsek, m kst ve n karar deikeninden oluan dorusal kstlayc fonksiyonlarn
genel hali aadaki gibi ifade edilebilir.
a
11
X
1
+a
12
X
2
+ +a
1j
X
j
+ +a
1n
X
n
b
1
a
21
X
1
+a
22
X
2
+ +a
2j
X
j
+ +a
2n
X
n
b
2
.
. . .
a
i1
X
1
+a
i2
X
2
+ +a
ij
X
j
+ +a
in
X
n
b
i . .
. .
a
m1
X
1
+a
m2
X
2
+ +a
mj
X
j
+ +a
mn
X
n
b
m
Kstlayclardaki karar deikenlerinin katsaylar (a
ij
), farkl rnlerin
retiminde kullanlan teknolojiyi yanstt iin, teknolojik katsaylar ad verilir.
Kstlayclarn sa taraf sabitlerini oluturan b
i
ler daha nce ifade ettiimiz gibi elverili kaynak
miktarn gsterir. Bu kaynak miktarlar kstlayc fonksiyonuna gre her zaman snrl olmaz. Bazen
karar deikenlerinin istediinden fazla veya tam eitlikte olabilir. Bu nedenle kstlayc denklemler, =
eitlik eklinde olabilecei gibi, eitsizlik eklinde de olabilir. Eitsizlik durumu, yukarda grld gibi
(kk eit) eklinde olabilecei gibi, (byk eit) eklinde de olabilir.
a
i1
X
1
+a
i2
X
2
+ +a
ij
X
j
+ +a
in
X
n
b
i
veya
a
i1
X
1
+a
i2
X
2
+ +a
ij
X
j
+ +a
in
X
n
= b
i
Kstlayc fonksiyonlar genel olarak aadaki ekilde de gsterilebilir.
) ,......... 2 , 1 (
) ,....... 2 , 1 (
n j
m i
b X a
i j
i j ij
=
=
19
aret Kstlamas
Dorusal programlama probleminin matematiksel modelini tamamlamak iin her bir karar deikeninin
negatif olmama varsaymn salamas gerekir. Karar deikeni X
j
nin sadece pozitif deerli olduu
varsaylrsa , X
j
0 iaret kst modele eklenir.
X
j
0 (j=1,2, n)
imdi dorusal programlama modelinin matematiksel yazlm aadaki gibi olacaktr.
Max/Min Z = c
1
X
1
+ c
2
X
2
+ + c
n
X
n
Kstlayclar
a
11
X
1
+a
12
X
2
+ +a
1n
X
n
b
1
a
21
X
1
+a
22
X
2
+ +a
2n
X
n
b
2
.
. . .
. . . .
a
m1
X
1
+a
m2
X
2
+ +a
mn
X
n
b
m
ve X
1
,X
2,
,X
n
0
Herhangi bir dorusal programlama modeli, belirlenen ama fonksiyonunu minimize veya maksimize
edecek karar deikenlerinin deerini bulmak iin kurulur.
Dorusal programlama modelinin temel bileenleri nelerdir?
DORUSAL PROGRAMLAMA MODEL KURMA
UYGULAMALARI
Bu balk altnda dorusal programlamann varsaymlar altnda bir problemin, dorusal programlama
modeli olarak nasl ifade edilebilecei, rneklerle anlatlmaya allacaktr. Bir karar problemi iin
model gelitirme ncesinde amacn, karar deikenlerinin ve parametrelerin tanmlanm olmas gerekir.
Dorusal programlamann uygulama alanlarn rneklemek ve modellemek iin aadaki baz
problemlerin modellenmesi ele alnacakt.
retim Planlamas
Dorusal programlamann en yaygn kullanld alanlardan birisi, retim iletmelerin de maksimum karl
veya minimum maliyetli retim bileenlerini belirlemede kullanlmasdr.
rnek 2.1. Bir marangoz iletmesi masa ve sandalye retmektedir. Bir masa yapm iin 30 metre
tahtaya ve 5 saat i gcne gerek vardr. Bir sandalye yapm iin de 20 metre tahtaya ve 10 saat i
gcne gerek vardr. letmenin elinde 300 metre tahta ile 110 saat i gc vardr. Ayrca bir masann
satndan elde edilen kr 6 ve bir sandalyenin satndan elde edilen kr 8dir. letmenin amac
maksimum kara ulamaktr. Buna gre marangoz iletmesi ne kadar masa ve sandalye retmelidir.
Problemi dorusal programlama modeli olarak ifade ediniz.
zm: Karar deikenleri:
X
1
: retilecek masa miktarn,
X
2
: retilecek sandalye miktarn, gstersin.
20
Ama fonksiyonu;
Max Z = 6 X
1
+ 8
X
2
(Toplam kar. retilecek X
1
adet
masa ve X
2
adet sandalyeden elde edilecek karlarn toplam.)
Kstlayclar
30X
1
+ 20X
2
300 (tahta kst)
5X
1
+ 10X
2
110 (i gc kst)
ve X
1
,X
2
0
rnek 2.2. Bir iletme X,Y ve Z gibi rn retmektedir. Bir birim X retiminde 1 birim A mal
girdisi ile 1 birim B mal girdisi kullanlmaktadr. Bir birim Y mal retiminde ise 1 birim A mal ile 2
birim B mal girdisi kullanlmaktadr. Birim Z retiminde ise sadece A mal girdisi kullanlmaktadr.
letmenin elinde kullanlabilir 40 birim A mal ile 20 birim B mal bulunmaktadr.
te yandan, bir birim X malnn sat fiyat 10, bir birim Y malnn sat fiyat 15 ve bir birim Z
malnn sat fiyat ise 12dir. Bu X,Y,Z mallarnn birim retim maliyetleri srasyla 8, 9 ve 7dir.
Buna gre iletmenin karn maksimum klabilmek iin retim bileimi ne olmaldr. Problemi dorusal
programlama modeli halinde ifade ediniz.
zm: Karar deikenleri:
X
1
: retilecek X rnnn miktarn,
X
2
: retilecek Y rnnn miktarn,
X
3
: retilecek Z rnnn miktarn, gstersin.
Ama karn maksimizasyonu olduundan, ncelikle iletmenin rettii rn iin birim net
karlarnn bulunmas gerekmektedir.
Birim kar: Birim sat fiyat birim retim maliyeti
Buna gre X
1
in net kar 2, X
2
nin net kar 6 ve X
3
n net kar da 5 dir.
Ama fonksiyonu:
Max Z = 2X
1
+ 6X
2
+5X
3
Kstlayclar
X
1
+ X
2
+X
3
40 (A mal girdisi)
X
1
+2X
2
20 (B mal girdisi)
ve X
1
,X
2
, X
3
0
rnek 2.3. Bir metalik para reten atlye A ve B mamullerini imal etmektedir. A dan 3 /para ve B
den 2 /para kr edebilmektedir. Her gn, her bir mamulden 12 dzine satabilmektedir. Atlyede torna,
freze ve talama olmak zere tezgh vardr.
A mamulnden bir birim retebilmek iin, tornada 5 dakika, frezede 7 dakika ve talamada 4
dakika ilem grmesi gerekmektedir.
B mamulnden bir birim retebilmek iin, tornada 3 dakika, frezede 9 dakika ve talamada 7
dakika ilem grmesi gerekmektedir.
Atlyede bir torna, bir freze ve bir talama tezgah vardr. Bu tezghlar baka ilerde de kullanld
iin sadece aada belirtilen miktarlarda bo zamanlar vardr.
21
Tezgah bo Zaman (dak.)
Torna
Freze
Talama
65
100
90
A ve Bden ne kadar retilsin ki maksimum kara ulalsn. Problemi dorusal programlama modeli
olarak ifade ediniz.
zm: Karar deikenleri:
X
1
: A mamulnden retilecek miktar,
X
2
: B mamulnden retilecek miktar, gstersin.
Talep: 12 dzine 12 12 = 144 adet olmak zere,
Ama fonksiyonu;
Max Z = 3X
1
+ 2X
2
Kstlayclar
X
1
144 (talep)
X
2
144 (talep)
5X
1
+ 3X
2
65 (torna zaman)
7X
1
+ 9X
2
100 (freze zaman)
4X
1
+ 7X
2
90 (talama zaman)
ve X
1
,X
2
0
rnek 2.4. BORSAN firmasnn fabrikas var ve her fabrikada ayr boyda boru retilmektedir.
boyda boru satndan elde edilen birim karlar yledir. Byk boy iin 800, orta boy iin 600 ve
kk boy iin de 540. fabrikadaki emek ve makine glerine gre ancak haftada 1 nolu fabrikada
800 birim, 2 nolu fabrikada 650 birim ve 3 nolu fabrikada 450 birim rn retebilmektedir.
Fabrikalarn stoklama alanlar da snrldr. 1 nolu fabrikann 1400m
2
, 2 nolu fabrikann 1250 m
2
ve
nolu fabrikann da 800 m
2
lik stoklama alan vardr. Byk boy boru haftalk retiminde 2,5 m
2
, orta
boy boru haftalk retiminde 2 m
2
ve kk boy boru haftalk retimi iin 1,5 m
2
yere gerek vardr.
Sat blmnn tahminine gre haftada byk boy borudan 800, orta boy borudan 900 ve kk boy
borudan 600 birim satlabilmektedir. te yandan, ynetim fabrikada retilen mallarn greli saysnn
emek ve makine kapasitelerine denk oranda olmasn istemektedir.
Ynetim, karn en ok yapabilmek iin fabrikada her bir boydan ne kadar birimlik rn retilmesi
gerektiini saptamak istemektedir.
Problemi dorusal programlama modeli olarak kurunuz.
zm: Bu problemde, karar deikenleri ve parametreleri fabrika-rn ilikisini belirtecek ekilde ift
indisle gstermek yerinde olacaktr.
Karar deikenleri
X
ij
= iinci fabrikada retilecek jinci boyda boru miktar.
(i=1,2,3) (j= 1 byk, j=2 orta, j=3 kk)
22
Ama fonksiyonu:
Max Z = 800(X
11
+X
21
+X
31
)+600(X
12
+X
22
+X
32
)+540(X
13
+X
23
+X
33
)
Kstlayclar
Emek ve makine kapasiteleri kstlayclar
X
11
+X
12
+X
13
800
X
21
+X
22
+X
23
650
X
31
+X
32
+X
33
450
Stoklama alan kstlayclar
2,5X
11
+2X
12
+1,5X
13
1400
2,5X
21
+2X
22
+1,5X
23
1250
2,5X
31
+2X
32
+1,5X
33
800
Sat tahmini kstlayclar
X
11
+X
21
+X
31
800
X
12
+X
22
+X
32
900
X
13
+X
23
+X
33
600
Her fabrikada ynetimin istedii denk oranlar u ekilde gsterilebilir.
450 650
X
800
X X X
33 32 31 23 22 21 13 12 11
X X X X X + +
=
+ +
=
+ +
Bu eitlik, iki ayr dorusal kstlayc olarak aadaki ekilde yazlabilir.
650(X
11
+X
12
+X
13
) 800(X
21
+X
22
+X
23
) = 0
450(X
21
+X
22
+X
23
) 650(X
31
+X
32
+X
33
) = 0
Bylece model btn olarak aadaki ekilde yazlabilir.
Max Z = 800(X
11
+X
21
+X
31
)+600(X
12
+X
22
+X
32
)+540(X
13
+X
23
+X
33
)
Kstlayclar
X
11
+X
12
+X
13
800
X
21
+X
22
+X
23
650
X
31
+X
32
+X
33
450
2,5X
11
+2X
12
+1,5X
13
1400
2,5X
21
+2X
22
+1,5X
23
1250
2,5X
31
+2X
32
+1,5X
33
800
X
11
+X
21
+X
31
800
X
12
+X
22
+X
32
900
X
13
+X
23
+X
33
600
650(X
11
+X
12
+X
13
) 800(X
21
+X
22
+X
23
) = 0
450(X
21
+X
22
+X
23
) 650(X
31
+X
32
+X
33
) = 0
ve X
ij
0 (i=1,2,3) (j=1,2,3)
23
rnek 2.5. Atlas Mobilya, Ky Tipi ve Modern olmak zere iki deiik tip vitrin imal etmektedir.
Her bir vitrin imal edilirken marangozluk, boyama ve son kontrol olmak zere ilemden gemektedir.
Aada grlen tabloda imal edilen her vitrin iin ilem sresi (saat), gnlk her ilem-retim kapasitesi
(saat) ve retilen her rnden elde edilen net kr () ile ilgili bilgiler yer almaktadr. Firmann, bir
datc firmayla, haftada her bir vitrinden minimum 300 adet (gnlk 60 adet) retmesi hususunda
anlamas mevcuttur. Firma sahibi, gnlk gelirini maksimum eden retim karmna karar vermek
istemektedir. Problemin dorusal programlama modelini kurunuz.
Vitrin tarz Marangozluk Boyama Son kontrol Net kar
Ky tipi 3 1,5 28
Modern 2 1 25
lem kapasite 360 200 125
zm: Karar deikenleri;
X
1
: Ky tipi vitrinden gnlk retim miktar,
X
2
: Modern tip vitrinden gnlk retim miktar.
Ama fonksiyonu
Max. Z = 28 X
1
+ 25 X
2
Kstlayclar
180 X
1
+ 120 X
2
21600 dakika
90 X
1
+ X
2
12000
45 X
1
+ 45X
2
7500
X
1
60
X
2
60
ve X
1
, X
2
0
Sa taraf sabitleri ve teknik katsaylar saatten dakika cinsine
dntrlmtr.
Tarm Planlamas
Tarm sektrnde iftiler iin en nemli problem, en ok kar salamak iin eldeki arazinin rn
trlerine gre taksimi nasl olmaldr? Ayrca arazinin retim verimliliinin bilinmesi halinde, hangi
rnden ne kadar retim elde edilebilecei de belirlenebilmektedir.
rnek 2.6. Bir iftinin toplam 100 dnmlk arazisi vardr. Yetitirebildii kadar; msr, fasulye ve
karpuz satabilmektedir. Msr 3/kg, fasulye 2/kg ve karpuz 0,25/kg kr getirmektedir. Btn bu
rnler iin ayn gbre kullanlabilir ve gbrenin fiyat 2 /kg dr. Gereken gbre miktar msr iin 20
kg/dnm, fasulye iin 10 kg/dnm ve karpuz iin 5 kg/dnmdr. Beklenen rn miktar 100 kg
msr/dnm, 80 kg fasulye/dnm ve 1000 kg karpuz/dnmdr. Btn rnn 5 gn iinde toplanmas
gerekir. Toplam 20 ii vardr ve her birinin creti 30/gndr. Her bir ii gnde 10 saat
alabilmektedir. Msr toplamak iin 20 ii saati/dnm, fasulyeyi toplamak iin 8 ii saati/dnm ve
karpuz toplamak iin 12 ii saati/dnm gerekmektedir. Buna gre iftinin karn maksimum klacak
rn ekimi ne olmaldr. Problemi dorusal programlama problemi olarak ifade ediniz.
24
zm: Karar deikenleri:
X
1
: msr ekilecek arazi(dnm) miktarn,
X
2
: fasulye ekilecek arazi(dnm) miktarn,
X
3
: karpuz ekilecek arazi(dnm) miktarn, gstersin.
Ama karn maksimizasyonu olduundan, ncelikle iftinin retecei rn iin birim karlarnn
bulunmas gerekmektedir.
Msr kr = (3/kg 100kg/dnm) 2/kg 20 kg/dnm- 30/gn 2 gn/dnm
= 300 40 60 = 200/dnm
Fasulye kr = (2/kg 80kg/dnm) - 2/kg 10 kg/dnm- 30/gn 8/10 gn/dnm
= 160 20 24 = 116/dnm
Karpuz kr = (0,25/kg 1000kg/dnm) 2/kg 5 kg/dnm 30/gn 12/10 gn/dnm
= 250 10 36 = 204/dnm
Ama fonksiyonu;
Max Z = 200X
1
+ 116X
2
+204X
3
Kstlayclar
X
1
+ X
2
+ X
3
100 (arazi kst)
20X
1
+ 8X
2
+12X
3
1000 (20 ii 10 saat 5 gn) (i gc kst)
ve X
1
, X
2
, X
3
0
Karm Problemi
rnek 2.7. Kmes havan besicilerine yem retip satan bir firma minimum maliyetli yemi retmeyi
istemektedir. Her bir tavuun 1. 2. ve 3. besleyici elemandan (vitaminden) gnde 250, 150 ve 400
birimlik ihtiyac olduu varsaylmaktadr. Bu besleyici elemanlar A,B,C ve D besin maddelerinin aada
belirtilen miktarlarnda (kilo bana) karmlarndan elde edilebilir.
Besleyici Elemanlar
(vitamin, protein vb.)
Besleyici maddeler
A B C D
Minimum Gnlk
ihtiya
1.besleyici elemen
2. besleyici elemen
3. besleyici elemen
20 15 10 30
25 15 20 25
25 20 20 30
250
150
400
Besleyici madde
Birim fiyatlar
30
/kg
10 20 40
Yemi reten firma besin maddelerinden, hangi oranda kartrp imal etmeli ki, maliyet minimum
olsun ve yem gnlk beslenme (vitamin, protein, vb.) ihtiyacn karlasn. Problemi dorusal
programlama modeli olarak ifade ediniz.
25
zm: Karar deikenleri:
X
1
: A besin maddesinden yeme katlacak miktar,
X
2
: B besin maddesinden yeme katlacak miktar,
X
3
: C besin maddesinden yeme katlacak miktar,
X
4
: D besin maddesinden yeme katlacak miktar, gstersin.
Ama fonksiyonu;
Max Z = 30X
1
+ 10X
2
+20X
3
+ 40X
4
Kstlayclar
20X
1
+ 15X
2
+ 10X
3
+ 30X
4
250
25X
1
+ 15X
2
+ 20X
3
+ 25X
4
150
25X
1
+ 20X
2
+ 20X
3
+ 30X
4
400
ve X
1
,X
2
, X
3
,X
4
0
Ulatrma ve Lojistik Problemler
Ulatrma ve datma ilikin problemler, daha geni anlamda lojistik problemler, ulatrma ve atama
problemleri blmnde daha sonra ele alnacaktr. Burada ama ulatrma ve lojistik problemlerinin,
nasl dorusal programlama modeli olarak ifade edileceini gstermektir.
rnek 2. 8. ATLAS Lastik iletmesi, fabrikasnda kamyon lastii retmektedir. Bu rnlerini, drt
ayr blgede bulunan bayilerine gndererek, bayileri aracl ile pazarlamaktadr. Fabrikalarn aylk
retim kapasiteleri, bayilerin aylk talepleri ve her bir fabrikadan her bir bayiye birim tama maliyetleri
aada verilmitir.
Fabrikalar A B C Toplam
Aylk retim kapasitesi 380.000 220.000 350.000 950.000
Bayilerin gelecek ay talepleri ise:
Bayi 1 2 3 4 Toplam
Talep 180.000 250.000 340.000 150.000 920.000 adet
Birim tama maliyetleri (*100)
Bayi
Fab.
1
2
3
4
A 25 38 30 19
B 22 34 18 36
C 35 15 15 32
Hangi fabrikadan hangi bayiye, minimum maliyetle ne kadar lastik gnderilebileceinin bilinmesi
istenmektedir. Bir ulatrma problemi olan bu problemin, dorusal programlama modelini kurunuz.
26
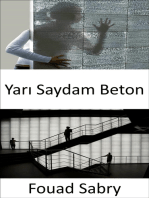
zm: Bu problemde, karar deikenleri ve parametreleri fabrika-bayi ilikisini belirtecek ekilde
(ekil 2.1.) ift indisle gstermek yerinde olacaktr.
Karar deikenleri;
X
ij
= i inci fabrikadan j inci bayiye gnderilecek lastik miktar, (i=1,2,3) (j=1,2,3,4)
F
A
F
B
F
C
Kapasiteler Fabrikalar Bayiler Talepler
B
1
B
2
B
3
B
4
3
0
1
9
23
38
2
2
34
18
3
6
3
3
1
3
13
32
380.000
220.000
350.000
180.000
250.000
340.000
150.000
ekil 2.1: Fabrikalardan bayilere ulatrma ebekesi
Ama fonksiyonu, toplam tama maliyetinin minimum klnmasdr. Kstlayclar ise, fabrika
kapasite kstlar ve bayi talep kstlar olacaktr. Buna gre problemin dorusal programlama modeli
aadaki gibi yazlr.
Max Z=25X
11
+38 X
12
+30 X
13
+ 19X
14
+22 X
21
+34 X
22
+18 X
23
+ 36X
24
+35 X
31
+15 X
32
+15 X
33
+32 X
34
Kstlayclar
X
11
+ X
12
+ X
13
+ X
14
380.000
X
21
+ X
22
+ X
23
+ X
24
220
X
31
+ X
32
+ X
33
+ X
34
350
X
11
+ X
21
+ X
31
180.000
X
12
+ X
22
+ X
32
250.000
X
13
+ X
23
+ X
33
340.000
X
14
+ X
24
+ X
34
150.000
ve X
ij
0 (i=1,2,3) (j=1,2,3,4)
rnek 2.9. Bir kargo uann blmesi: n blme, orta blme ve arka blme vardr. Bu blmelerin
arlk ve alan kapasiteleri aada belirtildii kadardr.
Blme Arlk kapasite(ton) Alan kapasite(m
3
)
n blme 120 7.000
Orta blme 180 9.000
Arka blme 100 5.000
27
Bununla birlikte, ilgili blmlerdeki kargolarn arl, uan dengeli srlebilmesi iin, her bir
blmenin arlk kapasiteleriyle denk oranda olmas gerekmektedir. Alan uygun olduu srece uua
hazr uaa yklenmesi nerilen drt tip kargo tr vardr.
Kargo tr Arlk(ton/adet) Hacim(m
3
/adet) Kar(/ton)
1 20 500 320
2 16 700 400
3 25 600 360
4 13 400 290
Bu kargolardan herhangi bir tr veya birden ok tr kabul edilebilir. Bu bilgilere gre, toplam kar
maksimum yapmak iin, hangi tr kargodan ne kadar kabul edilmeli ve bunlar blmeler arasnda nasl
datlmaldr. Problemi dorusal programlama modeli olarak kurunuz.
zm: Karar deikenleri:
X
ij
: iinci blme konacak jinci kargo tr miktarlar (i=1,2,3) (j=1,2,3,4)
Ama fonksiyonu;
Max Z = 320(X
11
+X
21
+X
31
) + 400(X
12
+X
22
+X
32
) +360(X
13
+X
23
+X
33
) +290(X
14
+X
24
+X
34
)
Kstlayclar
Kapasite kstlar(arlk)
20X
11
+16X
12
+25X
13
+13X
14
120
20X
21
+16X
22
+25X
23
+13X
24
180
20X
31
+16X
32
+25X
33
+13X
34
100
Kapasite kstlar(hacim)
500X
11
+700X
12
+600X
13
+400X
14
7000
500X
21
+700X
22
+600X
23
+400X
24
9000
500X
31
+700X
32
+600X
33
+400X
34
5000
Denge kstlar
180(X
11
+X
12
+X
13
+X
14
)-120(X
21
+X
22
+X
23
+X
24
) = 0
100(X
21
+X
22
+X
23
+X
24
)-180(X
31
+X
32
+X
33
+X
34
) = 0
ve X
ij
0 i = 1,2,3 j = 1,2,3,4
Denge kstlar
dan
gelmektedir.
28
rnek. 2.10. Otomobil imal eden bir firmann 5 yerde montaj fabrikas ve 12 farkl yerde sat bayisi
vardr. Fabrikalarn retim kapasiteleri srasyla: Fab.-A-100 adet, Fab.-B-40 adet, Fab.-C-120 adet,
Fab.D-80 adet ve Fab.-E-90 adettir. Firma fabrikalardan bayilere tama maliyetini minimize etmek
istemektedir. Buna gre hangi fabrikadan hangi bayiye ne kadar araba gnderilmelidir?
Bayi No: 1 2 3 4 5 6 7 8 9 10 11 12
Talep Edilen Ara Says : 35 42 28 52 17 33 62 61 43 37 28 42
Tama Maliyetleri (Araba Bana) (*100.)
Bayi No
Fab. 1 2 3 4 5 6 7 8 9 10 11 12
A 25 36 31 20 27 33 27 21 24 35 21 24
B 37 23 28 35 19 31 23 25 28 27 19 31
C 26 19 17 28 27 36 31 24 21 27 17 30
D 42 25 15 32 23 28 29 33 26 29 20 27
E 19 31 45 37 31 34 27 31 32 30 22 25
Yukardaki bilgilerden yararlanarak dorusal programlama modelini kurunuz.
zm: Karar deikenleri,
X
ij
: i . fabrikadan j. bayiye gnderilecek araba says
(i= A,B,C,D,E) fabrikalar
(j = 1,2, , 12) bayiler
Ama fonksiyonu;
Max Z = (25X
A1
+ 36X
A2
+ + 24X
A12
) + (37X
B1
+ 23X
B2
+ + 31X
B12
) + (26X
C1
+ 19X
C2
+ +
30X
C12
) + (42X
D1
+ 25X
D2
+ + 27X
D12
) + (19X
E1
+ 31X
E2
+ + 25X
E12
)
Kstlayclar
Bayii talep kstlar
X
A1
+ X
B1
+ X
C1
+ X
D1
+ X
E1
= 35
X
A2
+ X
B2
+ X
C2
+ X
D2
+ X
E2
= 42
X
A3
+ X
B3
+ X
C3
+ X
D3
+ X
E3
=28
X
A4
+ X
B4
+ X
C4
+ X
D4
+ X
E4
= 52
X
A5
+ X
B5
+ X
C5
+ X
D5
+ X
E5
= 17
X
A6
+ X
B6
+ X
C6
+ X
D6
+ X
E6
= 33
X
A7
+ X
B7
+ X
C7
+ X
D7
+ X
E7
= 62
X
A8
+ X
B8
+ X
C8
+ X
D8
+ X
E8
= 61
X
A9
+ X
B9
+ X
C9
+ X
D9
+ X
E9
= 43
X
A10
+ X
B10
+ X
C10
+ X
D10
+ X
E10
= 37
X
A11
+ X
B11
+ X
C11
+ X
D11
+ X
E11
= 28
X
A12
+ X
B12
+ X
C12
+ X
D12
+ X
E12
= 42
29
Fabrika kapasite kstlar,
X
A1
+ X
A2
+ X
A3
+ X
A4
+ X
A5
+ X
A6
+ X
A7
+ X
A8
+ X
A9
+ X
A10
+ X
A11
+ X
A12
100
X
B1
+ X
B2
+ X
B3
+ X
B4
+ X
B5
+ X
B6
+ X
B7
+ X
B8
+ X
B9
+ X
B10
+ X
B11
+ X
B12
90
X
C1
+ X
C2
+ X
C3
+ X
C4
+ X
C5
+ X
C6
+ X
C7
+ X
C8
+ X
C9
+ X
C10
+ X
C11
+ X
C12
120
X
D1
+ X
D2
+ X
D3
+ X
D4
+ X
D5
+ X
D6
+ X
D7
+ X
D8
+ X
D9
+ X
D10
+ X
D11
+ X
D12
80
X
E1
+ X
E2
+ X
E3
+ X
E4
+ X
E5
+ X
E6
+ X
E7
+ X
E8
+ X
E9
+ X
E10
+ X
E11
+ X
E12
90
ve X
ij
0 (i= A,B,C,D,E) (j = 1,2, , 12)
Personel Programlamas
Dorusal programlama iletmelerde minimum maliyetli igc gereksinimini karlamada, eitim-
retim planlamas gibi konularda etkin ekilde kullanlmaktadr.
rnek 2.11. Bir ulatrma iletmesinde haftann farkl gnlerinde tam gn alacak ara srclerine
ihtiya vardr. Haftann gnleri iin ihtiya duyulan src saylar aadaki gibidir.
Pazartesi
Sal
aramba
Perembe
Cuma
Cumartesi
Pazar
25
21
23
27
22
24
19
alma yasalarna gre her bir src, tam gn birbirini izleyen be gn alp, iki gn
dinlenmelidir. Bu i yeri hangi gnlerde ka srcy ie balatarak, toplam istihdam edecei src
saysn minimize edebilir. Bu i yeri problemi iin dorusal programlama modelini kurunuz.
zm: ncelikle karar deikenleri tanmlamamz gerektiinden ilk akla gelen;
X
j
: jinci gn, ite olan src says
X
1
: Pazartesi ite olacak src says, X
2
: Sal ite olacak src says, Bunun sonucunda ama
fonksiyonu: Pazartesinden balayarak, Pazara kadar ite olanlar toplam olacaktr. Kstlayclar ise,
haftann gnlerinde ite bulunmas gereken en az src says olacakt.
Min Z= X
1
+X
2
+X
3
+X
4
+X
5
+X
6
+X
7
Kstlayclar
X
1
25
X
2
21
X
3
23
X
4
27
X
5
22
X
6
24
X
7
19
X
j
0 (j=1,2,3,4,5,6,7)
30
Bu model iki adan yetersiz kalr. Birincisi ama fonksiyonu, iletmede tam gn istihdam edilecek
src toplamn vermez. nk her src ancak be gn altrlabilmektedir. rnein Pazartesi gn
ite, Pazartesi balayanlarn yannda, daha nceki gnlerde balayp iteki beinci, drdnc, nc
gnn alanlar da vardr. kincisi, baz deikenler birbiri ile iliki halindedir. rnein Pazartesi
alanlarn bazlar Sal gn de ite olacaktr.
u halde ilk akla gelen karar deikeni tanmnn yetersiz olduu ortaya kmtr. Bu problemde
bizden istenen, iletmenin tam gn alacak src ihtiyacn karlamak zere, haftann gnlerinde ka
srcnn ie balayacan bulmak olacaktr. Bunun iin karar deikenini yeniden tanmlamak
gerecektir.
Karar deikenleri;
X
1
: Pazartesi gn ie balayacak src says
X
2
:Sal gn ie balayacak src says
X
3
: aramba gn ie balayacak src says
X
4
: Perembe gn ie balayacak src says
X
5
: Cuma gn ie balayacak src says
X
6
: Cumartesi gn ie balayacak src says
X
7
: Pazar gn ie balayacak src says
Karar deikenlerini byle tanmladmzda Pazartesi iin en az 25 src ite olmaldr kst;
X
1
+ +X
4
+X
5
+X
6
+X
7
25
eklinde olacaktr. Dier gnler iinde benzer dnce geerlidir.
Ama fonksiyonu haftann gnlerinde ie balayacaklarn saylar toplam olacak, bylece toplam
istihdam edilecek src saysn verecektir. Problemin dorusal programlama modeli aadaki gibi
yazlr.
Min Z = X
1
+X
2
+X
3
+X
4
+X
5
+X
6
+X
7
Kstlayclar
X
1
+ X
4
+X
5
+X
6
+X
7
25 (Pazartesi kst)
X
1
+ X
2
+ X
5
+X
6
+X
7
21 (Sal kst)
X
1
+ X
2
+ X
3
+ X
6
+X
7
23 (aramba kst)
X
1
+ X
2
+ X
3
+ X
4
+ X
7
27 (Perembe kst)
X
1
+ X
2
+ X
3
+ X
4
+ X
5
22 (Cuma kst)
X
2
+ X
3
+ X
4
+ X
5
+ X
6
24 (Cumartesi kst)
X
3
+ X
4
+ X
5
+ X
6
+ X
7
19 (Pazar kst)
X
j
0 (j=1,2,3,4,5,6,7)
Beslenme (Diyet) Problemleri
Diyet gnlk tketilen yiyecek ve ieceklere verilen genel bir isimdir. Diyet problemi, salk iin
gerekli temel besinleri karlayacak en ekonomik diyet ne olmaldr? eklindedir. Bir baka ifade ile
trl yiyecek ve ieceklerden en uygununun seimidir. Dorusal programlama ile modellenip, zlen
ilk ekonomik problemden biri de diyet problemidir. lk nceleri diyet probleminin, saysal bir rnei
alnarak zm aratrlm, daha sonra beslenmeyle ilgili ilgin uygulamalar yaplmtr. Gnmzde
toplu beslenme yerlerinde (renci veya ii yemekhanelerinde), byk antiyelerde, gemi-denizalt vb.
yerlerde beslenme planlamas dorusal programlama ile yaplmaktadr.
31
rnek 2.12. nsan sal ile ilgili aratrma kurumlar, normal gelimi salkl bir yetikin insann ne
tr ve ne miktarda besleyici elementlere ihtiya duyduunu, yaptklar bilimsel almalarda
belirlemilerdir. Belirlenen sz konusu verilerin bir ksmnn salkl beslenme internet sitelerinde yer
ald grlebilir.
http://saglik.turk.net/
Yetikin bir insann gnlk beslenme ihtiyalarn karlayacak be temel besin elementi ile gnlk
minimum ihtiyalar aada verilmitir.
Besleyici Element Gnlk Minimum ihtiya
Karbonhidrat
Protein
Ya
Kalsiyum
Demir
134 gr
55 gr
40 gr
0,5 gr
0,1 gr
Yetikin bir insann yiyeceklerden ald besin says 20ye yakn
olmasna ramen belirlenen be besleyici elementten yeterli miktarlarda alndnda,
dier besleyici elementler iin bir eksiklik duyulmamaktadr.
Bu besinlerin temin edilebilecei yiyecek trleri ve bunlarn 250 gramnda (yaklak bir porsiyon)
bulunan besin miktarlaryla, her birinin birim fiyatlar (/Porsiyon) aada verilmitir.
Besin
Yiyecek
Karbonhidrat(gr)
Protein(gr)
Ya(gr)
Kalsiyum(gr)
Demir(gr)
Fiyat
(bir porsiyon)
Izgara
Fasulye
Patates
Kadayf
Yourt
183
131,9
36,8
55,2
28,7
58,2
43,2
4,5
0,26
11,2
9,6
4.8
0,36
0,10
0,05
0,23
0,12
0,24
0,26
0,18
0,03
0,05
0,02
0,04
0,00
350
272
171
43
62
Bir yetikin insan gnlk besin gereksinimini minimum maliyetle temin edebilmesi iin her yiyecek
trnden ne kadar tketmelidir. Problemin dorusal programlama modelini kurunuz.
zm: Bu problemde karar verici, yetikin insan gibi grnmekle birlikte, gerek hayatta ilgili
beslenme uzman karar verici durumdadr. Ama, minimum maliyetli besin gereksinimini karlamak
olup, her yiyecek trnden gnlk tketilebilecek miktarlar karar deikenleri olacaktr.
Karar deikenleri;
X
1
: bir gnde tketilecek zgara miktar
X
2
: bir gnde tketilecek fasulye miktar
X
3
: bir gnde tketilecek patates miktar
X
4
: bir gnde tketilecek kadayf miktar
X
5
: bir gnde tketilecek yourt miktar
32
eklinde yazlabilir. Problemin dorusal programlama modeli ise aadaki gibi kurulacaktr.
Min Z = 350X
1
+272X
2
+171X
3
+43X
4
+62X
5
Kstlayclar
183X
1
+131,9X
2
+36,8X
3
+55,2X
4
+28,7X
5
134
58,2X
1
+43,2X
2
+ 4,5X
3
+ 0,26X
4
+11,2X
5
55
9,6X
1
+ 4,8X
2
+ 0,36X
3
+ 0,1X
4
+ 0,05X
5
40
0,23X
1
+0,12X
2
+0,24X
3
+0,26X
4
+0,18X
5
0,5
0,03X
1
+0,05X
2
+0,02X
3
+0,04X
4
0,1
ve X
1
,X
2
,X
3
, X
4
,X
5
0
rnek 2.13. Bir at iftliinde uygulanacak beslenme program ile atlarn be besin maddesine olan
gnlk ihtiyalar karlanmak istenmektedir. Sz konusu be besin maddesi; A,B,C,D ve E olarak
tanmlanm olsun. Beslenmede yem tr (Yulaf, Yonca ve Arpa)kullanlmaktadr. yem eidinin
1 kgnn ierdii besin maddesi miktarlar, gnlk besin ihtiyalar (kg) ve yem maliyetleri aada
verilmitir.
Yem tr
Besin Maddeleri
Yulaf
(1 kgda)
Yonca
(1 kgda)
Arpa
(1 kgda)
Min. Gnlk
htiya (kg)
A 0,2 0,3 0,1 6
B 0,05 0,1 0,05 2
C 0,3 0,5 0,6 9
D 0,1 0,15 0,2 8
E 0,05 0,05 0,15 5
Maliyet(/kg) 9 14 17
Minimum maliyette gnlk besin ihtiyalarn karlayacak en iyi diyeti bulan dorusal programlama
modelini kurunuz.
zm: Karar deikenleri
X
1
: karma katlacak yulaf miktar
X
2
: karma katlacak yonca miktar
X
3
: karma katlacak arpa miktar
Ama Fonksiyonu
Min Z = 9 X
1
+14 X
2
+17X
3
Kstlayclar
0,2 X
1
+0,3X
2
+0,1X
3
6
0,05X
1
+0,1X
2
+0,05X
3
2
0,3X
1
+0,5X
2
+0,6X
3
9
0,1X
1
+0,15X
2
+0,2X
3
8
0,05X
1
+0,05X
2
+0,15X
3
5
ve X
1
,X
2
,X
3
0
33
Reklam Seimi Problemi
Gnmz iletmeleri rn ve hizmetlerini mterilerine tantmak ve talebi artrmak iin etkin reklam
kampanyalar yrtrler. Reklamn amacna ulamasna ynelik olarak, etkili olacak reklam seiminde
dorusal programlama kullanlmaktadr.
rnek 2.14. Eskiehirde 4 perakende dkknndan oluan bir dkkn zincirinin reklam yneticisi 2
medya seeneini gz nnde tutuyor. Biri yerel bir gazetede yarm sayfalk ilanlar, dieri TVA daki
reklamlardr. Reklam yneticisi reklama maruz kalma orannn reklam kampanyasnn sonunda ehir
merkezinde en az %40, il genelinde de en az % 60 olmasn istiyor.
Sz konusu TV reklam bana bu oran ehir civarnda %5, il genelinde %3tr. Yarm sayfalk gazete
ilan bana bu oran ehir merkezinde %4, il genelinde %3tr. Yarm sayfalk gazete ilannn maliyeti
9.250, televizyon reklamnn maliyeti 20.000dr.
Ama arzulanan hedefi karlayacak en az maliyetli reklam stratejisini semektir. Dorusal
programlama modelini kurunuz.
zm: Karar deikenleri;
X
1
: Yarm sayfalk gazete ilan says (ka gn kacak)
X
2
: TV reklam says
Ama fonksiyonu;
Min Z = 9.250X
1
+ 20.000X
2
Kstlayclar
0,05X
1
+ 0,04X
2
0,40
0,03X
1
+ 0,03X
2
0,60
ve X
1
, X
2
0
34
zet
Dorusal programlama, snrl (kt) kaynaklarn
deiik faaliyetler arasnda datmn optimum
(en iyi) klmak iin tasarlanm bir matematiksel
modelleme yntemidir. Endstri, askeri, tarm,
ulam, inaat, ekonomi, salk ve hatta davran
ve sosyal bilimler alanlarnda baarl dorusal
programlama uygulamalar vardr. Yntemin
kullanll, bilgisayar yazlmlarndaki
gelimelerle daha da artmtr.
Bir problem iin karar modeli gelitirmek ve
kurmak gerek sistemi matematiksel olarak ifade
etmek demektir. Bu ilem yaplrken bilgi kayb
kanlmazdr. nemli olan en az bilgi kayb ile
dnm gerekletirebilmektir. Bu nedenle
modelden tutarl sonular elde edilebilmesi iin:
dorusallk, toplanabilirlik, blnebilirlik ve
belirlilik varsaymlarnn kabul edilmesi gerekir.
Dorusallk: Kstlar ve ama fonksiyonu birinci
dereceden fonksiyon olmasdr. Toplanabilirlik:
Karar deikenlerine verilecek deerlere gre her
birinin salad katklar toplanp, toplam katky,
yani ama fonksiyonunu oluturuyorsa
toplanabilirlik varsaym geerlidir demektir.
Blnebilirlik: Modelin karar deikenleri Xjler,
her trl reel deerleri alabiliyorsa, blnebilirlik
varsaym salanyor demektir. Bazen girdi ve
ktlarn blnmezlik sorunu nedeniyle, karar
deikenlerini tamamnn veya bazlarnn tam
say olmas gerekebilir. Belirlilik: Dorusal
programlama modelindeki tm parametrelerin
(ama fonksiyonu katsaylar-cj, sa taraf
sabitleri-bi ve teknoloji katsaylar- aij) biliniyor
olduu varsaymdr.
Karar deikeni ile tesadfi deiken birbirinden
farkldr. Karar deikeni: bir problemde karar
vericinin kontrol altnda olup da, deeri
aratrlan eylemler karar deikenleridir. Karar
deikenlerine kontrol edilebilen deikenlere
denir. statistikte deiken X
i
-tesadfi deiken-
dir ve serbeste deerler alabilen deiken olarak
tanmlanr.
Dorusal programlama modelinin temel
bileenleri karar deikenleri, ama fonksiyonu
ve kstlayclardr.
Dorusal programlama-nn en yaygn kullanld
alanlardan birisi, retim iletmelerinde en ok
karl veya en az maliyetli retim bileenlerini
belirlemede kullanlmasdr.
35
Kendimizi Snayalm
1. Aadakilerinden hangisi dorusal prog-
ramlama iin sylenemez?
a. Dorusal karar problemidir
b. Matematiksel modeldir
c. Kt kaynaklarn datmdr
d. Nfus planlamadr
e. Dorusal denklemdir
2. Bir sistemi oluturan unsurlarn arasndaki
ilikilerin, matematiksel simge ve sembollerle
gsterilmesine ne ad verilir?
a. Ama fonksiyonu
b. Model
c. Kstlayc
d. Algoritma
e. Karar deikeni
3. Aadakilerin hangisi dorusal
programlamann uygulama alanlar iinde yer
almaz?
a. Ulam
b. Datm
c. Tarm
d. Trafik
e. klim
4. Dorusal programlamada dorusallk
varsaym aadakilerden hangisini iermez?
a. Ama foksiyonu
b. retim kst
c. Karar deikeni
d. Parametreler
e. Datm kst
5. retim girdileri toplam ile, ayr ayr girdilerin
toplam eittir varsaym hangisidir?
a. Dorusallk
b. Toplanabilirlik
c. Blnebilirlik
d. Tam saylk
e. Negatif olmama
6. Aadaki retimlerden hangisinde girdi ve
ktlarn blnmezlii sz konusudur?
a. Otomobil
b. Un
c. Buday
d. Kereste
e. ukulata
7. Aadakilerden hangisi bir dorusal
programlama modelinin parametrelerinden
deildir?
a. a
ij
b. c
J
c. X
ij
d. b
i
e. a
mn
8. Bir dorusal programlama modelinde karar
deikenleri aadakilerden hangisini
gstermez?
a. retim miktar
b. Depolama miktar
c. Sat miktar
d. Tketim miktar
e. Gelir miktar
9. Bir dorusal programlama modelinde ama,
aadakilerin hangisi olamaz?
a. Fayda
b. Kar
c. Optimum
d. Maksimum
e. Minimum
10. Bir dorusal model kurmak iin
aadakilerden hangisinin bilinmesine gerek
yoktur?
a. Ama
b. c
j
c. d
j
d. a
ij
e. b
i
36
Kendimizi Snayalm Yant
Anahtar
1. d Yantnz yanl ise Giri balkl konuyu
yeniden gzden geiriniz.
2. b Yantnz yanl ise Giri balkl konuyu
yeniden gzden geiriniz.
3. e Yantnz yanl ise Giri balkl konuyu
yeniden gzden geiriniz.
4. d Yantnz yanl ise Dorusal Programla-
mann Varsaymlar balkl konuyu yeniden
gzden geiriniz.
5. b Yantnz yanl ise Dorusal Programla-
mann Varsaymlar balkl konuyu yeniden
gzden geiriniz.
6. a Yantnz yanl ise Dorusal Programla-
mann Varsaymlar balkl konuyu yeniden
gzden geiriniz.
7. c Yantnz yanl ise Dorusal Programla-
mada Model Kurma balkl konuyu yeniden
gzden geiriniz.
8. e Yantnz yanl ise Dorusal Programla-
mada Model Kurma balkl konuyu yeniden
gzden geiriniz.
9. a Yantnz yanl ise Dorusal Programla-
mada Model Kurma balkl konuyu yeniden
gzden geiriniz.
10. c Yantnz yanl ise Dorusal Programla-
mada Model Kurma balkl konuyu yeniden
gzden geiriniz.
Sra Sizde Yant Anahtar
Sra Sizde 1
Dorusal programlamann uygulama alanlar:
Ulatrma ve lojistik problemleri, Endstriyel
retim planlamas ve envanter(stok) kontrol,
Personel programlamas, Beslenme(diyet)
problemleri, Karm problemleri, Tarmsal
planlama, Finansal planlama, Yatrm planlamas,
Salk sistemleri, Askeri planlama, Trafik
planlamas, Atama problemleri, Reklam seimi
problemleri saylabilir.
Sra Sizde 2
Dorusallk (oranllk) varsaym, toplanabilirlik
varsaym, blnebilirlik varsaym ve belirlilik
varsaymlardr.
Sra Sizde 3
Dorusal programlama modelinin temel
bileenleri; Karar deikenleri, ama fonksiyonu
ve kstlayclardr.
37
Yararlanlan Kaynaklar
Doan, ., (1995), Yneylem Aratrmas
Teknikleri ve letme Uygulamalar, Bilim
Teknik yaynevi, stanbul.
Kara, ., 1991, Dorusal Programlama, Bilim
Teknik Yaynevi, Eskiehir.
ztrk, A. (2011). Yneylem Aratrmas,
Geniletilmi 13. bask, Ekin kitabevi, Bursa.
Taha, H. (2000). Operations Research an
Introduction, (6.Basmdan eviri: Yneylem
Aratrmas) eviren ve Uyarlayan: .Alp Baray
ve akir Esnaf, Literatr yaynlar, stanbul.
Turban, E. and Meredity, J.R., 1988,
Fundamentals of Management Science,
Fourth Edition, Business Publications, Inc., Plano
Texas.
Winston, W.L. (1994). Operations Research,
Third Edition, Duxbury Pres, California.
http://ubmail.ubalt.edu/~harsham/opre640/opre64
0.htm (eriim tarihi: 01.11.2011)
http://www.inform.org/
38
Amalarmz
Bu niteyi tamamladktan sonra;
Grafik zmn temel esaslarn tanmlayabilecek,
Grafik zmde yaplan ilemleri sralayabilecek,
Kstlayc dorusal denklemlerin grafiini izebilecek,
Grafikde uygun zm kmesini izebilecek,
Grafik zmden problemin optimum zmn belirleyebilecek,
bilgi ve becerilere sahip olabilirsiniz.
Anahtar Kavramlar
Seenekli zm
Uygun zm
Uygun zm Alan
Dbkey
Bkey
Ke Nokta
Karar Modeli
Snrsz zm
indekiler
Giri
Grafik zmn Temel Esaslar
Grafik zmn Admlar
Maksimizasyon Modelinin Grafik zm
Minimizasyon Modelinin Grafik zm
Grafik zmde zel Durumlar
3
39
GR
Bir nceki blmde grld gibi, ok farkl alanlardaki problemler dorusal programlamada, karar
modeli olarak modellenebilmektedir. Dorusal programlama, ama fonksiyonunu etkileyen
kstlayclarn bulunmas ve bunlarn dorusal eitlik ve eitsizlikler olarak verilmesi durumunda, amaca
en iyi bir biimde ulalmas iin, kt kaynaklarn en verimli ekilde kullanlmasn salayan bir
matematiksel yntemdir. Byle bir programlama srecinde, nce gerekli veriler toplanr, probleme ait bir
model kurulur ve modelin zm aratrlr. Bu zmler, kurulmu olan modelin yapsna bal olarak
tek bir zm ya da seenekli zm olabilir. Hatta modelin hibir zm bulunmayabilir. Karar
vericinin farkl seenekler arasndan, iletmesi iin en uygun olann, uygulamaya koymas gerekir. Baz
durumlarda, modele dahil edil(e)memi eitli etkenlerden dolay, optimum(en iyi) zm yerine, ona en
yakn olan baka bir zmn benimsenmesi sz konusu olabilir. Her durumda dorusal programlama,
karar vericiler iin nemli bir ara olarak kullanlabilmektedir.
GRAFK ZMN TEMEL ESASLARI
Bir dorusal programlama modelinin tm kstlarn salayan her X vektrne,
X=[X
1
,X
2
, X
j
, X
n
]
uygun zm denir. Uygun zmlerin oluturduu kmeye, Uygun zm Alan (UA) denir.
Uygun zn Alan = {X | AXb, X0 }
Burada, A- matris ve b-stn vektrdr;
a
11
a
12
a
1n
b
1
A= a
21
a
22
a
2n
b = b
2
. . . .
a
m1
a
m2
a
mn
b
m
Karar modeli asndan her uygun zm bir seenek, Uygun zm Alan ise seenekler kmesi
anlamndadr. Uygun zm Alan zerinde X
j
lere gre, ama fonksiyonunun maksimum (en byk)
veya minimum (en kk) deerini ald X
j
lere optimum (en iyi) zm seti, ama fonksiyonuna kar
gelen deerine optimum (en iyi) deer denir.
Uygun zm Alan nasl tanmlanr?
Uygun zm Alan dbkey(konveks) bir alandr. Dbkey alann temel zellii, bu alan iinde
iki nokta ele alnp bir doru parasyla birletirildiinde, birletiren doru parasnn tamamnn alan
kalmasdr(ekil 3.1.). Bir anlamda Uygun zm Alan kmesindeki herhangi iki nokta iftini
Dorusal Programlama
Modellerinin zm:
Grafik zmTeknii
40
birletiren doru paras, tamamen Uygun zm Alan kmesinde ise, uygun zm alan dbkey bir
kmedir. Sz konusu doru parasnn bir ksmn iine almayan kme ise, ibkey (konkav) kmedir
(ekil 3.1.).
X
1
X
1
X
2
X
2
Dbkey
bkey
ekil 3.1: Dbkey ve bkey alan rnekleri
Uygun zm Alannn dbkey olmas, farkl iki uygun zme ulaldnda, bunlar birletiren
doru paras zerindeki her noktann da uygun zm olduunu gsterir.
Dbkey ve ibkey alanlarn bir birinden fark nedir?
U(ke) Nokta Teoremi: Grafik zerinde Uygun zm Alannn (UA) farkl iki noktasnn
dbkey birleimi olarak yazlamayan noktas varsa, buna u nokta veya ke nokta denir. Dzlemde
bir genin, bir karenin keleri u (ke) noktadr.
u halde, ama fonksiyonu maksimizasyon (en bykleme) veya minimizasyon (en kkleme)
ynnde olan bir dorusal programlama modelinin:
i. Eer modelin optimum (en iyi) zm varsa, bu zm Uygun zm Alannn bir ke
noktasndadr.
ii. Ama fonksiyonu optimum (en iyi) deerini birden ok ke noktasnda alyorsa, bu noktalarn
her dbkey birleimi de optimum(en iyi) zmdr.
GRAFK ZMN ADIMLARI
Grafik zm teknii ile genellikle iki karar deikenli modellerin zm mmkn olur. Uygulamada
genellikle ok sayda deiken ve kstlayc ieren modellerle karlalr. Ancak burada incelenecek
olan karar modellerinde iki deiken bulunacaktr. Yine de iki deikenli modellerin grafik zmleri,
dorusal programlamann mantnn daha kolay kavranmasna nemli lde katkda bulunur. nk
ok daha karmak modellerin zmnde, yine ayn mantk yol gsterecektir.
Modelin iki karar deikeni olduunda, kstlarn her biri dzlemde bir doru oluturur. Bu
dorunun ikiye ayrd dzlemin bir blgesi, ilgili kstt salayan (X
1
, X
2
)i deerlerini verir. Modelin
tm kstlayc fonksiyonlar ayn koordinat sisteminde izilerek, her bir ksttn salanan blgeleri
taranrsa, kstlar birlikte gerekletiren (X
1
, X
2
) ikilileri, yani Uygun zm Alan(UA) taranm
blge olarak ortaya kar.
41
Yukardaki aklamalar nda bir dorusal programlama modelinin grafik zmnde yaplacak
ilemler yle sralanabilir.
i. Her bir kst eitlik olarak ele alnp, kar gelen dorunun grafii izilerek, kst salayan yn
(blge) iaretlenir. Tm kstlar ayn anda salayan blge taranarak Uygun zm
Alan(UA) olarak belirlenir.
ii. Uygun zm Alannn ke noktalarnda karar deikenlerinin ve ama fonksiyonunun deeri
hesaplanarak amac salayan ke, optimum zm noktas olarak ilan edilir.
iii. Optimum zm seti (ama fonksiyonu ve karar deikenlerinin deeri) yazlarak zme
ulalm olur.
Grafik zmde yaplan ilemler nasl sralanr?
MAKSMZASYON MODELNN GRAFK ZM
Maksimizasyon amal dorusal programlama modellerinin grafik zmleri bir rnek zerinde
aklanmaya allacaktr. Bunun iin iki rn reten bir iletmenin retim modeli aadaki gibi olsun.
Karar deikenleri;
X
1
= rn -Iden retilecek miktar,
X
2
= rn -IIden retilecek miktar, olmak zere dorusal karar modeli;
Max Z = 300X
1
+ 250X
2
Kstlayclar
2X
1
+ X
2
40 (igc kst-saat)
X
1
+ 3X
2
45 (kapasite kst)
2X
1
+ X
2
40 (talep kst)
X
1
0 (negatif olmama kst)
X
2
0 (negatif olmama kst)
eklinde kurulmu olsun. ki deiken ieren model, iki boyutlu uzayda grafik zm teknii ile
zlebilir.
Kstlayclarn Grafik izimi
Dorusal karar modelinin optimum zmn bulmak iin ncelikle Uygun zm Alannn(UA)
belirlenmesi gerekmektedir. lk admda modelin kstlayclar olan dorusal eitsizliklerin grafiini
izmek gerekir. Btn dorusal programlama modellerinde negatif olmama kstlayclar (X
1
, X
2
0)
bulunduundan, ncelikle bu kstlarn doyurulmas ile balamak gerekir. Koordinatlar ekseninde, uygun
zm alannn hangi blmde yer ald belirlenir. rnek modeldeki X
1
(rn Iden retilecek miktar)
genellikle apsis (yatay) ekseninde, X
2
(rn IIden retilecek miktar),ordinat (dey) ekseninde gsterilir.
42
20
20
40
40
60
60
80
80
100
100
0
X
1
X
2
I. Blge II. Blge
III. Blge
IV. Blge
Bu eksen X
2
0 kstna kar gelir
Bu eksen X
1
0 kstna kar gelir
ekil 3.2: Koordinat dzleminde X
1
, X
2
0 (I. Blge) gsterimi
X
1
, ve X
2
deikenlerinin zm deerlerinin anlaml olabilmesi iin, negatif olmayan deer almalar
gerekir. Olas zm deerleri rn I ve rn IIden retilecek miktarlar gsterecekti. Matematiksel
olarak;
X
1
0 (X
1
, rn Iden retilecek ise pozitif bir deer alacak, retilmeyecek ise sfr deerini
alacak demektir).
X
2
0 (X
2
, rn IIden retilecek ise pozitif bir deer alacak, retilmeyecek ise sfr deerini
alacak demektir).
Bunun yannda X
1
0, yatay eksenin(apsis) st tarafn, X
2
0 dikey eksenin (ordinat) sa tarafn iaret
eder ki, bu da koordinat ekseninin I.Blgesidir (ekil 3.2.).
Dorusal programlama modelinin grafii, koordinat diyagramnn
neden I. Blgesinde izilir?
Grafik zm aratrlacak karar modeli;
Max Z = 300X
1
+ 250X
2
Kstlayclar
2X
1
+ X
2
40 (igc kst-saat)
X
1
+ 3X
2
45 (kapasite kst)
2X
1
+ X
2
40 (talep kst)
X
1
, X
2
0
Dorusal kstlayclarn veya eitsizliklerin grafiini izmek iin iki adm izlenir.
Adm 1: Dorusal eitsizlikler eitlik halinde ifade edilerek, bunlarn snrlarn gsteren, dorular izilir.
43
Adm 2: Dorunun hangi tarafnn eitsizlie uygun dt belirlenir.
Dorusal programlamada kurulmu model, karar vermede
kullanlacandan, karar modeli diye de adlandrlr.
Bu admlarn uygulamas, rnek model zerinde kstlayclarn srasyla grafikleri izilerek
gsterilecektir.
gc kst, 2X
1
+ X
2
40 eitsizlii eitlik halinde ifade edilirse,
2X
1
+ 1 X
2
= 40 olur.
ki deikenli dorusal denklemlerin grafiini izmenin en kolay yolu, izilecek dorunun yatay ve
dikey ekseni kestii noktalar bulmak ve bu noktalar bir doruyla birletirmektir. Bunun iin nce
denklemde X
1
e sfr verilir.
X
1
=0 (rn Iden hi retilmezse)
2(0) + 1 X
2
= 40
buradan, 1 X
2
= 40 X
2
= 40 ( rn IIden 40 birim retilir.)
Eer rn Iden hi retilmez ise, btn kaynaklar rn IInin retiminde kullanlacak ve 40 birim
retilebilecektir. X
2
= 40 olduunda denklemin dorusu dikey ekseni A(X
1
=0, X
2
=40) noktasnda(ekil
3.3) kesecek demektir.
imdi de denklemin izilecek dorusunun yatay ekseni kestii noktay bulmak iin X
2
ye sfr verilir.
X
2
=0 (rn IIden hi retilmezse)
2X
1
+ 1(0) = 40
buradan, 2 X
1
= 40 X
1
= 20 ( rn Iden 20 birim retilir.)
Eer rn IIden hi retilmez ise, btn kaynaklar rn Inin retiminde kullanlacak ve 20 birim
retilebilecektir. X
1
= 20 olduunda denklemin dorusu yatay ekseni B(X
1
=20, X
2
=0) noktasnda(ekil
3.3) kesecek demektir.
ekil 3.3: gc kstnn (2X
1
+ X
2
40) grafii
Uygun alan bu igc kst dorusunun sol alt tarafna dmektedir. Uygun alan belirlemede
pheye dlmesi halinde, dorunun iki tarafndan birer nokta belirlenir, sol alt taraftan K(10, 10) ve sa
44
st taraftan L(20, 10), bu noktalardan (ekil 3.4) kstlayc denklemi salayan noktann bulunduu alan
uygun alan olacaktr.
K(10, 10) iin;
2(10) + 1(10) = 30
30(otuz) deeri, kstlaycnn sa taraf sabiti 40dan daha kk bir deerdir ve 2X
1
+ 1 X
2
40
kstn salamaktadr.
Alnan dier nokta, L(20, 10) iin;
2(20) + 1 (10) = 50
50 (elli) deeri kstlaycnn sa taraf sabiti 40dan byk bir deerdir ve kstlayc denklemi
salamaz.
ekil 3.4: gc kstnn uygun alannn grafii
Kapasite kst, 1X
1
+ 3 X
2
45 eitsizlii eitlik halinde ifade edilirse;
1X
1
+ 3 X
2
= 45 olur.
ki deikenli dorunun grafiini izmek iin, dikey ve yatay eksenleri kestii noktalarn bulunmas
yeterli olacaktr.
X
1
=0 (rn Iden hi retilmezse)
1(0) + 3 X
2
= 45
buradan, 3 X
2
= 45
X
2
= 15 ( rn IIden 15 birim retilir.)
X
2
= 15 olduunda denklemin dorusu dikey ekseni C(X
1
=0, X
2
=15) noktasnda (ekil 3.5) kesecektir.
X
2
=0 (rn Iden hi retilmezse)
45
1 X
1
+ 3(0) = 45
buradan, X
1
= 45
X
1
= 45 ( rn Iden 45 birim retilir.)
X
1
= 45 olduunda denklemin dorusu dikey ekseni D(X
1
=45, X
2
=0) noktasnda (ekil 3.5) kesecektir
Uygun alan ise dorunun alt ksmna dmektedir.
ekil 3.5: Kapasite kstnn uygun alan grafii
Talep kst, 1X
1
12 eitsizlii eitlik halinde ifade edilirse,
X
1
=12
X
1
=12nin grafii izildiinde, yatay eksende E(X
1
=12, X
2
=0) noktasndan (ekil 3.6.) balayan ve
dikey eksene paralel bir doru olacaktr.
ekil 3.6: Talep kst uygun alan grafii
46
Uygun zm Alannn Belirlenmesi
Uygun zm Alannn snrlar, kstlayc dorusal denklemlerle ifade edilen, izilen dorusal
eitsizliklerin grafii ile belirlenir. Karar modelinin tm kstlayclar ayn dzlemde(I. Blge) izilerek,
her bir kstn uygun alanlar taranrsa, Uygun zm Alan (UA) taranm blge (ekil 3.7.) olarak
ortaya kar.
10
10
20
20
30
30
40
40
0
X
1
X
2
RN 1
RN II
A
1X
1
12 (talep kst)
B
C
D E
G
H
F
O
2X
1
+ X
40 (i gc kst)
X
1
+ 3 X
45 (kapasite kst)
Uygun zm Alan (UA)
ekil 3.7: Uygun zm Alannn taranm grafii
ekil 3.7.de grld gibi dorular bir biri ile (X
1
, X
2
nin deerleri iin) A, B, C, D, E, F, G, H, O
ke noktalarnda kesimektedir. Bu noktalardan A, B,D,F,H noktalar kstlayc denklemlerin tamamn
karlayamad iin uygun olmayan noktalardr. Btn kstlayc denklemlerin saland blge, taral
alan veya C, G, E, O drtgeni Uygun zm Alandr (ekil 3.8.)
ekil 3.8: Uygun zm Alan grafii
Uygun zm Alan snrlar iinde(snrlayan izgiler dhil) herhangi bir (X
1
, X
2
) noktas, karar
modelinin btn kstlarn matematiksel olarak salar. rnein I(X
1
=5, X
2
=3) noktas matematiksel
olarak btn kstlayc denklemleri salar. yle ki;
47
gc kst, 2X
1
+ 1 X
2
40
2(5) + 1(3) 40
13 40
Kapasite kst, 1X
1
+ 3 X
2
45
1(5) + 3(3) 45
14 45
Talep kst, X
1
12
5 12
Optimum (En yi) zmn Bulunmas
Uygun zm Alan, ekil 3.8.de grlecei gibi dbkey (konveks) bir alandr. Dorusal
programlamada optimum zm her zaman, Uygun zm Alannn ke noktalarndadr. rnek karar
modelinde optimum zm C, G, E, O ke noktalarndan birisinde olacaktr. Uygun zm Alan
bilindiine gre C, G, E, O ke noktalarndan hangisinde, ama fonksiyonunun (MaxZ=300X
1
+ 250X
2
)
en byk deer ald belirlenerek, optimum zme ulalr. Bunun iin ke noktalarnn her birinin,
(X
1
, X
2
) deerleri ama fonksiyonunda yerine konur.
Ke noktalar X
1
X
2
MaxZ=300X
1
+ 250X
2
O
C
E
G
0 0
0 15
12 0
? ?
MaxZ=300(0) + 250(0)=0
MaxZ=300(0) + 250(15)=3.750
MaxZ=300(12) + 250(0)=3.600
MaxZ=?
Ke noktalarn X
1
ve X
2
deerlerini bulmak iin, o noktada kesien doru denklemleri zlr.
Matematikten hatrlanaca zere, iki bilinmeyenli iki denklem zm ile X
1
ve X
2
deerleri kolayca
bulunabilir.
G noktasnda, kapasite(1X
1
+ 3 X
2
45) ve talep (1X
1
12) kstlarnn dorular kesimektedir. Bu
noktada iki denklem ayn deeri almaktadr. Bir baka ifade ile G noktasnda iki denklem bir birine
eittir.
X
1
= 12
X
1
+ 3 X
2
= 45
Burada X
1
= 12 olduu aktr. Bu iki denklemden birincisi (-1) ile arplr ve alt alta toplanrsa:
-X
1
= -12
X
1
+ 3 X
2
= 45
3X
2
= 33
X
2
=11 bulunur.
48
12
10
20
20
30
30
40
40
0
X
1
X
2
RN 1
RN II
C
(0
,1
5
)
M
a
x
Z
=
3
.7
5
0
O
G
(1
2
,1
1
)
M
a
x
Z
=
6
.3
5
0
E
(1
2
,0
)
M
a
x
Z
=
3
.6
0
0
15
ekil 3.9: Optimum zm- G noktas grafii
G noktasnn (X
1
=12, X
2
=11) deerleri (ekil 3.9.) bulunmu oldu. Bu noktadaki ama fonksiyonu
deerini de ekleyerek, ke noktalarndaki en byk deer belirlenir.
Ke noktalar X
1
X
2
MaxZ=300X
1
+ 250X
2
O(Orijin)
C
E
G
0 0
0 15
12 0
12 11
MaxZ=300(0) + 250(0)=0
MaxZ=300(0) + 250(15)=3.750
MaxZ=300(12) + 250(0)=3.600
MaxZ=300(12) + 250(11)=
Ama fonksiyonunun en byk deeri: 6.350, G(12, 11) ke noktasnda elde edilmitir. Buna gre
sz konusu retim probleminde optimum zm;
X
1
= 12 (retilmesi gereken rn I miktar)
X
2
= 11 (retilmesi gereken rn II miktar)
Max Z = 6.350 dr.
Maksimizasyon problemlerinde, orijine (0,0) en uzak ke noktalarnda en iyi zm aratrmas
yaplmas, bizleri daha fazla hesaplamadan kurtarr, bylece daha abuk optimum zme ulalr.
rnek: 3. 1. rnek 2.1 de modeli kurulan marangoz iletme retim modelinin optimum zm grafik
zm teknii aratrlsn.
Max Z = 6X
1
+ 8X
2
Kstlayclar
30X
1
+ 20X
2
300 (tahta kst)
5X
1
+ 10X
2
110 (igc kst)
ve X
1
,X
2
0
49
zm: retim modeli iki deikenli olduu iin grafik zm teknii ile zlebilir.
Tahta kst, 30X
1
+ 20X
2
300 eitsizlii eitlik halinde ifade edilirse,
30X
1
+ 20X
2
= 300 olur.
ki deikenli dorusal denklemlerin grafiini izmek iin, izilecek dorunun yatay ve dikey ekseni
kestii noktalar bulunur.
X
1
=0 (Masa hi retilmezse)
30(0)+ 20X
2
= 300
X
2
= 15 ( Sandalyeden 15 birim retilir.)
X
2
=0 (Sandalye hi retilmezse)
30 X
1
+ 20(0) = 300
X
1
= 10 ( Masadan 10 birim retilir.)
Denklemin dorusu dey ekseni A(X
1
=0, X
2
=15) noktasnda, yatay ekseni de B(X
1
=10, X
2
=0)
noktasnda (ekil 3.10.) kesecek demektir.
gc kst, 5X
1
+ 10X
2
= 110 eitsizlii eitlik halinde ifade edilirse,
5X
1
+ 10X
2
= 110 olur.
ki deikenli dorusal denklemlerin grafiini izmek iin izilecek dorunun yatay ve dey ekseni
kestii noktalar bulunur.
X
1
=0 (Masa hi retilmezse)
5(0)+ 10X
2
= 110
X
2
= 11 ( Sandalyeden 11 birim retilir.)
X
2
=0 (Sandalye hi retilmezse)
5X
1
+ 10(0) = 110
X
1
= 22 ( Masadan 22 birim retilir.)
Denklemin dorusu dikey ekseni C(X
1
=0, X
2
=11) noktasnda, yatay ekseni de D(X
1
=22, X
2
=0)
noktasnda (ekil 3.10.) kesecek demektir.
3 10 13 20
3
10
13
A
L (4,9)
8 (10,0)
l
0
uygun zum Alani (uA)
x
2
x
1
C (0,11)
u
30 X
1
+ 20 X
2
300
5 X
1
+ 10 X
2
110
ekil 3.10: Uygun zm alan ve grafik zm
50
ekil 3.10.da grld gibi dorular bir biri ile (X
1
, X
2
nin deerleri iin) A, B, C, D, E, F, ke
noktalarnda kesimektedir. Bu noktalardan A ve D ke noktalar kstlayc denklemlerin tamamn
karlayamad iin uygun olmayan noktalardr. Kstlayc koullarn birlikte karland blge,
taranm veya B ,C ,E, F ke noktalarnn snrlandrd blgedir. Bu blge, problemin Uygun zm
Alan (UA)dr (ekil 3.10.).
Uygun zm alannda her noktann (X
1
, X
2
) deerleri problem iin bir uygun zm verir.
Optimal zm ise, uygun zm alannn ke noktalarnn birisindedir. Bunun iin ke noktalarnn
her birinin, (X
1
, X
2
) deerleri ama fonksiyonunda yerine konur.
Ama maksimizasyon ynnde olduu iin orijinden uzak olan B,C,E noktalarna bakmak yeterli
olacaktr.
Ke noktalar X
1
X
2
MaxZ=6X
1
+ 8X
2
B
C
E
10 0
0 11
? ?
MaxZ=6(10) + 8(0)=60
MaxZ=6(0) + 8(11)=88
MaxZ=?
E noktasnn koordinat (X
1
,X
2
) deerleri: E noktas iki kstlayc denklem dorusunun kesitii
noktadr. Bu nedenle, iki bilinmeyenli iki denklem zlr:
30X
1
+ 20X
2
= 300
5X
1
+ 10X
2
= 110
kinci denklemi (-2) ile arpar ve birinci denklem ile toplarsak;
30X
1
+ 20X
2
= 300
-10X
1
- 20X
2
= -220
20 X
1
= 80
ve
4
20
80
X
1
= =
olur.
X
1
= 4 X
2
= 9 olarak bulunur.
Ke noktalar X
1
X
2
MaxZ=6X
1
+ 8X
2
B
C
E
10 0
0 11
4 9
MaxZ=6(10) + 8(0)=60
MaxZ=6(0) + 8(11)=88
MaxZ=6(4) + 8(9) =
Ama fonksiyonunun maksimum en byk deeri 96, E noktasnda elde edilmektedir. Bu durumda
problemin optimum zm seti;
X
1
= 4 retilecek masa miktar
X
2
= 9 retilecek sandalye miktar
ve Max Z = 96 toplam kardr.
rnek 3.2. Yeni bir maksimizasyon modelinin optimum zm grafik zm teknii aratrlsn.
Max Z = 8X
1
+ 11X
2
Kstlayclar
51
5X
1
+ 4X
2
40 (Birinci kstlayc)
-X
1
+ 3X
2
12 (kinci kstlayc)
ve X
1
,X
2
0
zm: ncelikle kstlayclarn yatay ve dikey ekseni kestii noktalar belirlenir. Bunun iin
deikenlerden birine sfr verilerek dier deikenin deeri hesaplanr.
Birinci kstlayc, 5X
1
+ 4X
2
40 eitlik halinde ifade edilirse,
5X
1
+ 4X
2
= 40 olur.
X
1
= 0 5(0) + 4X
2
= 40 X
2
= 10
izilecek dorunun dikey ekseni kesecei nokta A(0, 10)dur (ekil 3.11.).
X
2
= 0 5X
1
+ 4(0) = 40 X
1
= 8
izilecek dorunun yatay ekseni kesecei nokta B(8, 0)dr (ekil 3.11.).
kinci kstlayc, -X
1
+ 3X
2
12 eitlik halinde ifade edilirse,
-X
1
+ 3X
2
= 12 olur.
X
1
= 0 -1(0) + 3X
2
= 12 X
2
= 4
izilecek dorunun dikey ekseni kesecei nokta C(0, 4)dur (ekil 3.11.).
X
2
= 0 -1X
1
+ 3(0) = 12 X
1
= -12
izilecek dorunun yatay ekseni kesecei nokta D(-12, 0)dr (ekil 3.11.).
0
-2 -4 -6 -8 -10 -12 12 10 8 6 4 2
2
4
6
8
10
12
x
2
x
1
C (0,4)
8 (8,0)
uA
u
A
1
9
1
0
0
,
1
9
7
2
E
ekil 3.11: Uygun zn Alam ve grafik zm
kinci kstlaycnn grafiini izerken yatay ekseni (X
1
=-12)de kesmesi
neatif deer ald anlamna gelmez. nk izilen dorunun yalnz I. Blgedeki ksm
ile ilgilenilir.
52
ekil 3.11deki Uygun zm Alannda maksimizasyon amacna en uygun ke olarak E ve B
noktalar grlebilir. Hangisinin olmas gerektii hakknda kesin bir yargya varmak bizi hataya
drebilir. Bunun iin nce bu iki noktada (E ve B) karar deikenlerinin (X
1
,X
2
) deerleri bulunur.
Hangi nokta daha fazla kar veriyorsa, bu nokta en iyi zm veren noktadr.
Ke noktalar X
1
X
2
MaxZ=8X
1
+ 11X
2
B
E
8 0
? ?
MaxZ=8(8) + 11(0)=64
MaxZ=?
E noktasnda iki kstlayc kesimektedir. Bu nedenle bu noktada bu iki kstlayc birbirine eit
deerdedir.
5X
1
+ 4X
2
= 40
-X
1
+ 3X
2
= 12
kinci denklemi (+5) ile arpar ve birinci denklem ile toplarsak;
5X
1
+ 4X
2
= 40
-5X
1
+ 15X
2
=60
0 +19 X
2
=100
ve X
2
=100/19=5.26 olur.
X
2
=100/19 X
1
=72/19 olarak bulunur.
Ke noktalar X
1
X
2
MaxZ=8X
1
+ 11X
2
B
E
8 0
72/19 100/19
MaxZ=8(8) + 11(0)=64
MaxZ=8(72/19) + 11(100/19)=1676/19=88,21*
Ama fonksiyonunun maksimum deeri (88,21), E noktasnda elde edilmektedir. Bu durumda
problemin optimum zm seti;
789 , 3
19
72
1
= X
263 , 5
19
100
X
2
=
ve Max Z = 88,21 dir.
MNMZASYON MODELNN GRAFK ZM
Grafik zm teknii ile maksimizasyon problemleri zlebilecei gibi, benzer ekilde minimizasyon
(en kkleme) problemleri de zlebilir. Minimizasyon problemi olarak aadaki karar modeli ele
alnsn.
Min Z = 45X
1
+ 12X
2
Kstlayclar
X
1
+ X
2
300 (Kst-1)
3X
1
250 (Kst-2)
ve X
1
, X
2
0
53
Minimizasyonun grafik zmnde de maksimizasyon probleminde izlenen admlar geerlidir.
Tekrara dmemek iin burada dorudan optimum zmn bulunmasna nem verilecektir.
Kst-1in yatay ve dikey ekseni kestii noktalarn bulunmas:
1X
1
+ 1X
2
= 300 buradan,
X
1
=0 ise X
2
=300 A(0, 300)
X
2
=0 ise X
1
=300 B(300, 0)
Kst-2 iin ise, 3X
1
+ 0X
2
= 250
3X
1
=250 X
1
=250/3=83,3
Modelin Uygun zm Alannn belirlenmesi iin, kstlarn ayn koordinat sisteminde izimi
yaplrsa ekil 3.12. elde edilir.
ekil 3.12: Problemin Uygun zm Alan ve grafik zm
Dorusal programlamada karar modelinin optimum zm, Uygun zm Alannn ke
noktalarnda olduuna daha nce deinilmiti. rnekteki uygun zm alan stten snrsz olmakla
birlikte, ama minimizasyon olduunda, bunun bir mahsuru yoktur. nk minimizasyonda optimum
zm, orijine(0,0) en yakn ke noktalarnda yer alr. ekil 3.12. de uygun zm alannn ke
noktalar A ve B noktalardr. A ve B ke noktalarndan hangisinde ama fonksiyonunun (Min Z =
45X
1
+ 12X
2
) minimum olduu belirlenerek optimum zme ulalr. Ke noktalarnn her birinin
(X
1
, X
2
) deerleri ama fonksiyonunda yerine konur.
Ke noktalar X
1
X
2
Min Z=45X
1
+ 12X
2
A
B
? ?
300 0
Min Z=?
Min Z=45(300) + 12(0)=13.500
A Noktasnda kesien doru denklemleri eitlenerek, iki bilinmeyenli iki denklem zlrse;
1X
1
+ 1X
2
= 300
3X
1
= 250 X
1
= 250/3 = 83,33 bulunur.
54
X
1
= 83,33 birinci kstlayc denklemde yerine konursa,
1(83.33)+ 1X
2
= 300 X
2
= 300-83,33=216,67 bulunur.
A ke noktasnda (X
1
, X
2
) deerleri (X
1
=83,33 X
2
=216,67) bulunmu oldu. Bu noktada ama
fonksiyonunun deeri:
Min Z = 45(83,33)+ 12(216,67) = 6.350
Ke noktalar X
1
X
2
Min Z=45X
1
+ 12X
2
A
B
83,33 216,67
300 0
Min Z=45(83,33) + 12(216,67)=
Min Z=45(300) + 12(0)=13.500
Ama fonksiyonunun en kk deeri 6.350 A(X
1
=83,33 X
2
=216,67) ke noktasnda elde edilmitir.
Buna gre optimum zm;
X
1
= 83,33
X
2
= 216,67
ve Min Z = 6.350 dir.
rnek 3.3. Yeni bir minimizasyon probleminin zm, grafik zm teknii ile yaplsn
Min Z = 2X
1
+ 6X
2
Kstlayclar
2X
1
+ 4X
2
1600 (Kst-1)
6X
1
+ 2X
2
1800 (Kst-2)
X
2
350 (Kst-3)
X
1
50 (Kst-4)
X
2
100 (Kst-5)
X
1
+ X
2
300 (Kst-6)
ve X
1
,X
2
0
zm: ncelikle kstlayclarn yatay ve dikey ekseni kestii noktalar belirlenir. Bunun iin
deikenlerden birine sfr verilerek dier deikenin deeri hesaplanr.
Birinci kstlayc,
2X
1
+ 4X
2
= 1600
X
1
= 0 X
2
= 400
X
2
= 0 X
1
= 800
kinci kstlayc,
6X
1
+ 2X
2
= 1800
X
1
= 0 X
2
= 900
X
2
= 0 X
1
= 300
nc kstlayc
X
2
= 350
Drdnc kstlayc
X
1
= 50
Beinci kstlayc
X
2
= 100
Altnc kstlayc
X
1
+ X
2
= 300
X
1
= 0 X
2
= 300
X
2
= 0 X
1
= 300
55
100 200 300 400 300 600 700 800 900
100
0
100
200
300
400
300
600
700
800
900
100
0
A
8
C
u
L
l
uygun zum Alani
1
2
3
3
4 6
x
2
x
1
ekil 3.13: Uygun zm Alan ve grafik zm
ekil 3.13deki Uygun zm Alannda minimizasyon amacna en uygun ke olarak orijine en yakn
ke olacaktr. Burada E noktas en uygun nokta olarak grlmektedir. E noktasnda zm deerlerinin
bulursak;
-E noktas iin,
X
2
= 100
X
1
+ X
2
= 300
X
1
=200 olur.
E(200 , 100) Min Z = 2(200) + 6(100) = 1000 dir.
Bu durumda problemin optimum zm seti;
X
1
= 200
X
2
= 100
ve Min Z = 1000 dir.
E ve F ke noktalarndan hangisinin orijine en yakn nokta olduu
konusunda teretdte dlmesi halinde her iki noktada da ama fonksiyonu deerine
baklr. Minimum olan optimum zm ilan edilir.
56
GRAFK ZMDE ZEL DURUMLAR
Buraya kadar genellikle tek optimum zm olan dorusal programlama problemlerinin grafik zm
verilmeye alld. Bir dorusal karar modelinin zm, grafik zm teknii ile aratrlrken baz zel
durumlardan birisiyle karlalabilir.
1. Uygun zm alan bo(uygun zm bulunmama),
2. Snrsz zm(ama fonksiyonu uygun zm alannda snrsz),
3. Seenekli(oklu) optimal zm.
imdi bunlar srasyla aklanmaya allacaktr.
Uygun zm Alan Bo
Karar modelinin kstlarnn grafii izildiinde, uygun zm alan olumuyor (bo) ise, problemin
zm yoktur denir. Bu durum izleyen kstlayclara sahip bir karar modelinde gsterilmitir.
X
1
+ 2X
2
6
2X
1
+ X
2
8
X
1
7
ve X
1
, X
2
0
Sz konusu kstlayc ayn koordinat dzleminde grafii izildiinde (ekil 3. 14.)
2
2
4
4
6
6
8
8
0
X
1
X
2
ekil 3.14: Uygun zm alan bo (Kstlayclarn hepsini birden salayan bir blge yok).
Uygun zm bulunmamas, problemin yapsndan kaynaklanabilecei gibi, modelleme hatalar da
(bir kstlaycnn ynnn ters olmas gibi) uygun zm alannn bo olmasna neden olabilmektedir.
57
Snrsz zm
Baz dorusal programlama modellerinin ama fonksiyonu deeri, uygun zm alan zerinde istenen
ynde sonlu deilse, optimum deeri bulunamayacandan, snrsz zm vardr denir. Bu durum karar
vericiye hibir neri getiremez. Snrsz zmn varl, grafik zmde, grafik zerinde kolaylkla
grlebilir. rnek problem olarak,
Max Z = 3X
1
+ 5X
2
Kstlayclar
X
1
5
X
2
10
X
1
+ 2X
2
10
ve X
1
, X
2
0
Karar modelinin, uygun zm alan ekil 3.15.de grlebilir.
ekil 3.15: Ama fonksiyonu uygun zm alannda snrsz (Uygun zm alannn sadan snr yok.)
ekil 3.15.de grlebilecei gibi, maksimizasyon amal karar modelinin uygun zm alan sadan
snrlandrlmamtr. Bunun nedeni, problemin modelleme aamasnda hata yapmak olabilir. Bu
snrszlk, X
1
rnnden sonsuz sayda retme nermektedir ki, bu uygulamada anlaml deildir. nk
hibir iletme snrsz retim kaynana ve snrsz pazarlama imkanna sahip deildir.
Grafik zm tekniinde snrsz zm nasl anlalr?
Seenekli Optimal zm
Dorusal programlama problemleri birden ok optimum zme sahip olabilir. Karar modelinin ama
fonksiyonunun optimum deeri, uygun zm alannda iki ayr noktada ayn deeri alyorsa, modelin
seenekli (alternatif) zm vardr denir. Bu durum, aadaki karar modelinin grafik zmnde
grlebilir.
Max Z = 3X
1
+ 2X
2
Kstlayclar
6X
1
+ 4X
2
24
X
1
3
ve X
1
, X
2
0
58
Karar modelinin grafii zm ekil 3.16.da verilmitir.
0
6 3 4 3 2 1
1
2
3
4
3
6
x
2
x
1
8 (3,3/2)
A (0,6)
C (3,0)
u
ekil 3.16: Seenekli optimal zm grafii
Uygun zm alannn ke noktalar A, B, C, D dir. Ama fonksiyonu maksimizasyon olduundan,
optimum zm orijine (0, 0) uzak noktalarda olacaktr. Bunun iin A, B, Cde (X
1
, X
2
)nin alaca
deerleri aratrp, sz konusu noktalarda ama fonksiyonu deerini hesaplamak gerekir.
Ke noktalar X
1
X
2
MaxZ=3X
1
+ 2X
2
A
B
C
0 6
3 3/2
3 0
MaxZ=3(0) + 2(6)=
MaxZ=3 (3) + 2 (3/2)=
MaxZ=3 (3) + 2 (0)= 9
A ve B ke noktalarnda ama fonksiyonunun en iyi deeri (Max Z=12) ayndr. Bu durumda karar
modelinin seenekli optimum zm vardr. Bu iki noktay birletiren doru zerinde de tm (X
1
, X
2
)
deerleri iin, ama fonksiyonu deeri (Max Z=12) optimumdur.
rnek 3.4. Seenekli optimum zm iin yeni bir rnek,
Max Z = 6X
1
+ 2,5X
2
Kstlayclar
7X
1
+ 9X
2
63
12X
1
+ 5X
2
60
ve X
1
,X
2
0
zm: ncelikle kstlayclarn yatay ve dikey ekseni kestii noktalar belirlenir. Bunun iin
deikenlerden birine sfr verilerek dier deikenin deeri hesaplanr.
Birinci kstlayc
7X
1
+ 9X
2
= 63
X
1
= 0 X
2
= 7
X
2
= 0 X
1
= 9
kinci kstlayc
12X
1
+ 5X
2
= 60
X
1
= 0 X
2
= 12
X
2
= 0 X
1
= 5
59
0
12 10 8 6 4 2
2
4
6
8
10
12
x
2
x
1
A
8
C
uygun zum Alani
ekil 3.17: Uygun zm Alannda seenekli optimum zm
ekil 3.17.de ki Uygun zm Alannda maksimizasyon amacna en uygun ke noktalar orijinden
uzaktaki A, B, ve C noktalar grlmektedir. imdi srasyla bu noktalarda ama fonksiyonu deerini
aratralm.
- A noktasnn koordinat (X
1
,X
2
) deerleri;
A(0 , 7) Max Z = 6(0) + 2,5(7) = 17,5
- B noktasnn koordinat (X
1
,X
2
) deerleri; B noktas iki kstlayc fonksiyon dorusunun kesitii
noktadr. Bu nedenle, iki bilinmeyenli iki denklem zlr:
7X
1
+ 9X
2
= 63
12X
1
+ 5X
2
= 60
Birinci denklemi (5) ile ikinci denklemi de (-9) ile arpar ve taraf tarafa toplarsak;
35X
1
+ 45X
2
= 315
-108X
1
- 45X
2
= -540
-73 X
1
= -225
ve
08 , 3
73
225
X
1
= =
60 , 4
73
336
X
2
= =
30 )
73
336
( 5 , 2 )
73
225
( 6 )
73
336
;
73
225
( = + = MaxZ B
- C noktasnn koordinat (X
1
,X
2
) deerleri;
C(5 , 0) Max Z = 6(5) + 2,5(0) = 30
60
Ke noktalar X
1
X
2
MaxZ=6X
1
+ 2,5X
2
A
B
C
0 7
225/73 336/73
5 0
MaxZ=6(0) + 2,5(7)=17,5
MaxZ=6(225/73) + 2,5 (336/73)=
MaxZ=6 (5) + 2,5 (0)=
Bylece ama fonksiyonu B ve C noktalarnda ayn deeri ( Z=30) almtr. Bu durumda dorusu
zerindeki tm noktalarda da ayn deeri alacaktr. Yani problemin birden ok alternatif zm vardr
denir. imdi alternatif zmlerden ikisini yazarsak;
Optimum zm seti-1;
08 , 3
73
225
X
1
= =
60 , 4
73
336
X
2
= =
ve (
30 )
73
336
( 5 , 2 )
73
225
( 6 = + = MaxZ
Optimum zm seti-2;
X
1
= 5
X
2
= 0
ve Max Z = 30 dur.
Bir dorusal programlama problemini matematiksel modelle ifade etmek, en iyi zmn
aratrlmasnn yan sra, problemin yapsnda veya parametrelerde meydana gelebilecek deiiklikleri
analiz etme imkan da salar. Problemde iki karar deikeni var ise, grafik zmle tm olas durumlar
grlebilmekte ve analizler yaplabilmektedir. Uygulamada karlalan problemlerde karar deikeni ve
kstlayc says ikiden daha oktur. zellikle deiken says ikiden ok olduunda, grafik zm etkin
bir analiz teknii olmaz. Deiken ve kstlayc says itibariyle byk hacimli modellerin zmnde
etkin teknik olan Simpleks zm Teknii bir sonraki blmde ele alnacaktr.
61
zet
Grafik zmde: ama fonksiyonu ve kstlayc
denklemler birinci dereceden fonksiyonlar
olmaldr. Kstlar koordinatlar dzleminde
Uygun zm Alan oluturmaldr.
Bir dorusal programlama modelinin grafik
zmnde yaplacak ilemler yle sralanabilir.
i. Her bir kst eitlik olarak ele alnp, kar gelen
dorunun grafii izilerek, kst salayan yn
(blge) iaretlenir. Tm kstlar ayn anda
salayan blge taranarak Uygun zm Alan
(UA) olarak belirlenir. ii. Uygun zm
Alannn ke noktalarnda karar deikenlerinin
ve ama fonksiyonunun deeri hesaplanarak
amac salayan ke, optimum zm noktas
olarak ilan edilir. iii. Optimum zm seti(ama
fonksiyonu ve karar deikenlerinin deeri)
yazlarak zme ulalm olur.
Dorusal kstlayclarn veya eitsizliklerin
grafiini izmek iin iki adm izlenir.
Adm 1: Dorusal eitsizlikler eitlik halinde
ifade edilerek, bunlarn snrlarn gsteren,
dorular izilir. Adm 2: Dorunun hangi
tarafnn eitsizlie uygun dt belirlenir.
Uygun zm Alannn snrlar, kstlayc
dorusal denklemlerle ifade edilen, izilen
dorusal eitsizliklerin grafii ile belirlenir.
Karar modelinin tm kstlayclar ayn
dzlemde (I. Blge) izilerek, her bir kstn
uygun alanlar taranrsa, Uygun zm Alan
(UA) taranm blge olarak ortaya kar.
Uygun zm Alan, dbkey(konveks) bir
alandr. Dorusal programlamada optimum
zm her zaman, Uygun zm Alannn ke
noktalarndadr. Uygun zm Alannn ke
noktalarndan hangisinde, ama fonksiyonunun
en uygun (maksimizasyonda en byk,
minimizasyonda en kk) deeri ald
belirlenerek, optimum zme ulalr. Bunun
iin ke noktalarnn her birinin, (X
1
, X
2
)
deerleri ama fonksiyonunda yerine konur.
62
Kendimizi Snayalm
1. Grafik zmde Uygun zm Alan
koordinat sisteminin hangi blgesinde yer alr?
a. I. Blge
b. II. Blge
c. I. ve II. Blge
d. III. ve IV. Blge
e. I. ve IV. Blge
2. Aada verilen alanlardan hangisi dbkey
deildir?
a. b. c.
d. e.
3. Aada verilen alanlardan hangisi ibkey
deildir?
a. b. c.
d. e.
4. Grafik zmde ke nokta teoremi ne ie
yarar?
a. Uygun zm Alann bulmaya,
b. Kstlayclar salamaya,
c. Uygun zm kmesini bulmaya,
d. Optimum zm kmesini bulmaya,
e. Ama fonksiyonu dorusunu bulmaya,
5. 3X
1
+ 5X
2
150
X
1
- 2X
2
10
5X
1
+ 3X
2
150
ve, X
1
, X
2
0
Kstlayclarn gsterdii Uygun zm Alan
ka nolu blgedir?
0
30 40 30 20 10
10
20
30
40
30
-3
x
2
x
1
1
2
3 4
3
a. 1
b. 2
c. 3
d. 4
e. 5
63
6. 8X
1
+ 6 X
2
24 kstnn grafii aadaki
grafiklerden hangisinde doru izilmitir.
a.
2
2
4
4
6
6
0 X
1
X
2
8
b.
2
2
4
4
6
6
0 X
1
X
2
c.
2
2
4
4
6
6
0 X
1
X
2
8
d.
2
2
4
4
6
6
0 X
1
X
2
8
e.
2
2
4
4
6
6
0 X
1
X
2
64
7. Verilen dorusal programlama probleminin
optimum zm aadakilerden hangisidir?
Max Z = X
1
+ X
2
Kstlayclar;
8X
1
+ 6X
2
24
4X
1
+ 6X
2
12
X
2
1
2X
2
6
ve X
1
, X
2
0.
a. X
1
=0 X
2
= 3 Max Z=3
b. X
1
=6/8 X
2
=3 Max Z=15/4
c. X
1
= 9/4 X
2
= 1 Max Z=13/4
d. X
1
=3/ 2 X
2
=1 Max Z=5/2
e. X
1
=0 X
2
= 2 Max Z=2
8. Verilen dorusal programlama probleminin
optimum zm aadakilerden hangisidir?
Max Z = 2800X
1
+ 2400X
2
Kstlayclar
6 X
1
+ 4 X
2
150
2 X
1
+ 2 X
2
120
4 X
1
+ 2 X
2
140
X
2
25
ve X
1
, X
2
0
a. X
1
=10 X
2
= 50 Max Z=148.000
b. X
1
=30 X
2
= 10 Max Z=108.000
c. X
1
= 45/2 X
2
=25 Max Z=123.000
d. X
1
=10 X
2
= 25 Max Z=88.000
e. X
1
= 0 X
2
= 60 Max Z=144.000
9. Verilen dorusal programlama probleminin
optimum zm aadakilerden hangisidir?
Min Z= 100X
1
+ 150X
2
Kstlayclar;
10X
1
+ 4X
2
60
2X
1
+ 5X
2
50
2X
1
20
2X
2
30
ve, X
1
, X
2
0
a. X
1
=25 X
2
= 10 Min Z=4.000
b. X
1
= 25 X
2
=0 Min Z=2.500
c. X
1
=5 X
2
= 10 Min Z=2.000
d. X
1
=6 X
2
= 10 Min Z=2.100
e. X
1
=10 X
2
= 6 Min Z=1900
10. Verilen dorusal programlama probleminin
optimum zm aadakilerden hangisidir?
Min Z= X
1
+ 2X
2
Kstlayclar;
X
1
+ 3X
2
90
8X
1
+ 2X
2
160
3X
1
+ 2X
2
120
X
2
70
ve, X
1
, X
2
0
a. X
1
=90 X
2
=0 Min Z=90
b. X
1
= 8 X
2
= 48 Min Z=104
c. X
1
= 80 X
2
= 10 Min Z=100
d. X
1
= 50 X
2
= 24 Min Z=98
e. X
1
= 0 X
2
= 70 Min Z=140
65
Kendimizi Snayalm Yant
Anahtar
1. a Yantnz yanl ise Kstlayclarn Grafik
izimi balkl konuyu yeniden gzden
geiriniz.
2. d Yantnz yanl ise Grafik zmn Temel
Esaslar balkl konuyu yeniden gzden
geiriniz.
3. c Yantnz yanl ise Grafik zmn Temel
Esaslar balkl konuyu yeniden gzden
geiriniz.
4. d Yantnz yanl ise Grafik zmn Temel
Esaslar balkl konuyu yeniden gzden
geiriniz.
5. b Yantnz yanl ise Kstlayclarn Grafik
izimi balkl konuyu yeniden gzden
geiriniz.
6. e Yantnz yanl ise Kstlayclarn Grafik
izimi balkl konuyu yeniden gzden
geiriniz.
7. b Yantnz yanl ise Maksimizasyon
(Enbykleme) Modelinin Grafik zm
balkl konuyu yeniden gzden geiriniz.
8. a Yantnz yanl ise Maksimizasyon
(Enbykleme) Modelinin Grafik zm
balkl konuyu yeniden gzden geiriniz.
9. e Yantnz yanl ise Minimizasyon (En
Kkleme) Modelinin Grafik zm balkl
konuyu yeniden gzden geiriniz.
10. a Yantnz yanl ise Minimizasyon (En
Kkleme) Modelinin Grafik zm balkl
konuyu yeniden gzden geiriniz.
Sra Sizde Yant Anahtar
Sra Sizde 1
Uygun zm seeneklerinin oluturduu
kmeye Uygun zm Alan denir. Uygun
zm alan iinde karar deikenlerinin
alabilecei btn deerler dorusal programlama
modelinin kstlarn salar
Sra Sizde 2
Uygun zm Alan dbkey (konveks) bir
alandr. Dbkey alann temel zellii, bu alan
iinde iki nokta ele alnp bir doru parasyla
birletirildiinde, birletiren doru parasnn
tamam alan iinde kalmasdr. Sz konusu doru
parasnn bir ksmn iine almayan alan ise,
ibkey(konkav) kmedir.
Sra Sizde 3
Bir dorusal programlama modelinin grafik
zmnde yaplacak ilemler yle sralanabilir
Her bir kst eitlik olarak ele alnp, kar gelen
dorunun grafii izilir, kst salayan
yn(blge) iaretlenir. Tm kstlar ayn anda
salayan blge taranarak Uygun zm Alan
(UA) olarak belirlenir
Uygun zm Alannn ke noktalarnda karar
deikenleri kullanlr ve ama fonksiyonunun
deeri hesaplanr. Amac salayan ke, optimum
zm noktas olarak ilan edilir.
Optimum zm seti (ama fonksiyonunun ve
karar deikenlerinin deerleri) yazlarak zme
ulalm olur.
Sra Sizde 4
X
1
, ve X
2
deikenlerinin zm deerlerinin
anlaml olabilmesi iin, negatif olmayan deer
almalar gerekir. Yani X
1
0 ve X
2
0 koullar
salanmaldr.
(lgili rnden retilecek ise, X
1
pozitif bir deer
alr; retilmeyecek ise sfr deerini alacak
demektir).
(lgili rnden retilecek ise, X
2
pozitif bir deer
alr; retilmeyecek ise sfr deerini alacak
demektir).
Bunun yannda X
1
0, yatay eksenin(apsis) st
tarafn, X
2
0 dey eksenin (ordinat) sa
tarafn iaret eder ki, bu da koordinat ekseninin
I.Blgesidir
Sra Sizde 5
Bir dorusal programlama modellerinin ama
fonksiyonunun alabilece deerler, uygun
zm alannda ve istenen ynde sonlu deilse,
optimum deeri bulunamayacandan, snrsz
zm vardr denir.
66
Yararlanlan Kaynaklar
Doan, ., (1995), Yneylem Aratrmas
Teknikleri ve letme Uygulamalar, Bilim
Teknik yaynevi, stanbul.
Kara, ., 1991, Dorusal Programlama, Bilim
Teknik Yaynevi, Eskiehir.
ztrk, A. (2011). Yneylem Aratrmas,
Geniletilmi 13. bask, Ekin kitabevi, Bursa.
Taha, H. (2000). Operations Research an
Introduction, (6.Basmdan eviri: Yneylem
Aratrmas) eviren ve Uyarlayan: .Alp Baray
ve akir Esnaf, Literatr yaynlar, stanbul.
Render, B. and Stair, R.M.JR, (1988),
Quantitative Analysis for Management, Third
Edition, Allyn and Bacon INC. Boston
Turban, E. and Meredity, J.R., (1988),
Fundamentals of Management Science,
Fourth Edition, Business Publications, Inc., Plano
Texas.
Winston, W.L. (1994). Operations Research,
Third Edition, Duxbury Pres, California.
-http://ubmail.ubalt.edu/~Opre640
(eriim tarihi 01.11.2011)
-http://www.informs.org/
68
Amalarmz
Bu niteyi tamamladktan sonra;
Dorusal karar problemlerinin zmnde bir ardk saysal zmleme teknii olan Simpleks
Algoritmas ile ilgili temel kavramlar tanmlayabilecek,
Simpleks Algoritmas ile zm bulabilecek,
Simpleks Algoritmas ile zm srasnda karlalabilir durumlar aklayabilecek
bilgi ve becerilere sahip olabilirsiniz.
Anahtar Kavramlar
Simpleks Algoritmas
Temel ve Temel Olmayan Deiken
Temel Uygun zm, U Nokta
Ardtrma
Eniyi zm
Snrsz zm
Bo Kme
Birden Fazla Noktada Eniyi zm
indekiler
Giri
Temel Uygun zm, U Nokta, Analitik Yntem
Simpleks Algoritmasna Olan htiya ve Bir rnek zerinde Temel Admlar
Simpleks Tablo
Matris Gsterimi, Enbykleme ve Enkkleme in rnekler
4
69
GR
Bir dorusal karar probleminin zmnde eitli yntemler kullanlabilir. te yandan tm yntemler,
nceki blmlerde de belirtildii gibi, problemin uygun zm alan (eer bo kme deilse) ierisindeki
u noktalarn belirleyip ilerinden eniyi zm veya zmleri bulmaya dnktr. ki deiken olduu
durumda yaygn kullanlan yntem, nite 3de retilen grafik yntemdir. Daha fazla sayda deiken
olduunda ise analitik yntem veya bu nitenin konusu olan Simpleks Algoritmasna bavurulabilir.
Dorusal bamsz vektrlerden oluan, m denklem ve n deikenin olduu (mxnlik ve m<n) bir
sistemin zmnde, dier (n-m) tane deiken sfr deerini almak zere, ancak denklem says (m)
kadar deikene deer bulunabilir. rnek olarak iki denklem ve be deikenin olduu bir sistemde, her
seferinde deikene sfr deerini vererek, iki deiken iin zm bulunabilir. Burada, sfr deeri
verilen deikenlere temel d, deer almas iin zme alnan deikenlere ise temel deiken denir.
Temel d deikenler sfr iken temel deikenler iin bulunan zme temel zm denir. Bir temel
zmde tm temel deikenler sfr veya sfrdan byk deer aldysa bu zme bir temel uygun zm
denir ve bir temel uygun zm ayn zamanda bir u nokta demektir.
Analitik yntem, basite yukardaki gibi uygulanmakta ve kstlar eitlik haline getirilmi bir
denklem sisteminin belirtilen ekilde tm zmlerini elde ederek ilerinden temel uygun zm (u
nokta) olanlarn bulmaktadr. Temel uygun zm olma zellii salayanlar arasndan ama fonksiyonu
deerini eniyileyen, problemin eniyi zmn verecektir.
Yukardaki aklamalar nda analitik yntem, problemin u noktas olmayan baka noktalarn da
bulma ve ilem yk sebepleriyle pratik deildir.
Simpleks Algoritmas, grafik ve analitik yntemlerin uygulamadaki glklerini tamayan, ardk
saysal zm teknii snfnda bir yntemdir. Basitce izledii yol, bir u noktadan balayarak amaca gre
daha iyi zm verecek baka bir u noktaya gemek (eer varsa) ve istenen ynde iyilemenin olmad
durumda da durmaktr. Simpleks Algoritmas ile problemin denklem sistemini zen, u nokta olsun
olmasn tm noktalarn bulmak gerekmedii gibi, sadece u noktalarn bile tmnn snanmasna gerek
kalmayabilmektedir. Algoritma, her admda, uygun zm alannn bir u noktasn bulup irdelemekte ve
bu noktann eniyi zm olup olamayacan snamaktadr. Nokta eniyi zm deilse, amaca gre daha
iyi bir zm verecek izleyen u noktay bulur. Baz durumlarda da problemin uygun zm alan bo
kmedir yani tm kstlar salayan tek bir zm bile yok demektir. Benzer ekilde zel durumlardan
birisi de problemin snrsz veya birden fazla u noktada eniyi zmnn olmasdr.
zleyen blmlerde Simpleks Algoritmas daha ayrntl olarak anlatlacak ve rnekler verilecektir.
Ayrca yntemin matrislerle gsterimi ve bir zmde karlalabilir, yukarda belirtilen durumlar
tartlacaktr.
Simpleks Algoritmas
70
TEMEL UYGUN ZM, U NOKTA, ANALTK YNTEM
AX=b eklindeki, dorusal bamsz vektrlerden oluan, m denklem ve n deikenin olduu (mxnlik ve
m<n) bir sistemin zmnde, dier (n-m) tane deiken sfr deerini almak zere, ancak denklem says
(m) kadar deikene deer bulunabilir. rnek olarak aadaki gibi 2 denklem (m=2) ve 5 deikenin
(n=5) olduu bir sistemde, her seferinde 3 (n-m=3) deikene sfr deerini vererek, denklem says (m=2)
kadar deiken iin zm bulunabilir. Burada, sfr deeri verilen deikenlere temel d, deer almas
iin zme alnan deikenlere ise temel deiken denir. Bir zmde tm temel deikenler sfr veya
sfrdan byk deer aldysa bu zme bir temel uygun zm denir ve bir temel uygun zm ayn
zamanda bir u nokta demektir.
rnek 4.1.
denklem sistemi iin
temelde, (
temel d (sfr deerinde) iken kar gelen temel
zm hesaplayalm: n-m = 3 deiken (
temel d ve sfr deerinde ise,
elde edilir.
Birinci denklem (-2) ile arplp, ikinci denklem ile taraf tarafa toplandnda,
= (0, 0, 0,
) temel zm elde edilir. Bu zmde tm deikenler
olduundan bulunan temel zm ayn zamanda bir u noktadr. Verilen denklem sisteminin dier temel
zmleri de benzer ekilde her seferinde farkl iki dier deiken temelde, geriye kalanlar temel dnda
alnarak bulunabilir. Bunlarn arasndan u nokta olanlar tm deikenleri koulunu salayanlardr.
rnek 4.2. Aadaki denklem sisteminin tm temel zmlerini bulunuz.
m = 2 denklem n = 3 deiken olduundan her seferinde n-m=1 deiken temel d dier m = 2 deiken
temel alnarak temel zmler bulunmaldr.
71
1. x
1
temel d, x
2
, x
3
temel alndnda,
x
1
= 0
= (0,
2. x
2
temel d, x
1
, x
3
temel alndnda,
x
2
= 0
= (
3. x
3
temel d, x
1
, x
2
temel alndnda,
x
3
= 0
= (
Bulunan ilk iki zm (
) temel uygun zm ve ayn zamanda da birer u noktadr. nc
zm (
) ise negatif deer ierdiinden bir temel uygun zm deildir. Bu ekilde, olabilir tm
zmleri bulmak analitik yntemin temelidir. Grld gibi analitik yntem kk bir problem iin
bile i yk getirmektedir ve u nokta olmad halde baz noktalarn da zorunlu olarak hesaplanmasn
gerektirmektedir.
Analitik yntem, verilen denklem sisteminin tm temel zmleri bulunduktan sonra, ilerinden u
nokta olanlarnn bir ama fonksiyonunda deerlendirilip eniyisinin bulunmas ile sonulanr. Verilen
problemde ama fonksiyonu
olsun.
iin
iin
72
olup,
olduundan eniyi zm
= (
noktas olur.
rnek 4.1de verilen denklem sisteminin
temelde iken kar
gelen temel zmn bulunuz. Bulduunuz zm bir temel uygun zm mdr?
Bir temel zmde, tm deikenler olmakla birlikte, temelde
olduu halde sfr deerini alan bir deiken var ise, elde edilen zme dejenere
(bozulmu) zm denir. rnein rnek 4.1de
temelde iken
(
= ( 0, 0, 0,
)
zm yerine,
(
= ( 0, 0, 0,
, )
zm elde edilseydi, x
5
deikeni temelde olduu halde sfr deerini aldndan bu
zm dejenere bir zm olurdu.
SMPLEKS ALGORTMASINA OLAN HTYA VE BR RNEK
ZERNDE TEMEL ADIMLARI
Bu blmde Simpleks Algoritmas anlatlmaktadr. Simpleks Algoritmas analitik yntemin temellerini
esas alan fakat temel ve temel olmayan deikenlerin belirlenmesinden sonra, ama fonksiyonu deeri
iyileecekse, bir u noktadan dierine geen ardk bir zmleme tekniidir.
Simpleks Algoritmasnn temel admlarn bir rnek zerinde aklayalm. nce rnee esas tekil
edecek karar modelini gelitirelim.
rnek 4.3. Bir lojistik firmas ara filosunu geniletmek zere yeni trlar almay planlamaktadr.
Dnlen iki farkl model szkonusudur. Her iki model srasyla 4 ve 3 ton birim tama kapasitesine
sahiptir. Yeni ara almna ayrlabilecek bte en fazla 6.10
6
. olup birinci ve ikinci tp trlarn birim
fiyatlar srasyla 200.10
3
ve 100.10
3
. dr. Firma en fazla 40 yeni ara satn alabilecektir. Yeni aralarn
toplam tama kapasitesini enbykleyecek ekilde hangi tip trdan ka adet alnmas gerektiini bulacak
karar modelini gelitirerek problemin zmn bulalm.
Karar deikeni
X
i
: i. tip trdan satn alnacak adet
olarak tanmlanr.
Kar gelen karar modeli, kstlar ve ama fonksiyonu ile birlikte aadaki gibidir:
kstlar altnda
73
kinci kstn sadeletirilmesiyle, model aadaki gibi elde edilir.
kstlar altnda
Modelin Simpleks Algoritmas ile zlebilmesi iin nce kstlarn eitlik haline getirilmesi gerekir.
() eklindeki kstlarn eitlik haline getirilmesi iin kstn kk (byk) olan tarafna yeni bir
deiken eklentisi gerekir. Buna gre yukardaki modelde her iki ksta da srasyla s
1
ve s
2
deikenlerinin eklenmesi ile model aadaki hale dnr:
(1)
(2)
kisitlaii altinua
Modeli eitlik haline getirmek iin bu ekilde eklenen deikenlere aylak ( kst iin) ve artk
( kst iin) deiken denir ve ama fonksiyonunda bu deikenlerin katklar sfr alnr. Bu durumda s
1
ve s
2
aylak deikenlerdir.
Simpleks Algoritmas kstlar salayan ve pozitif deerli bir balang temel uygun zm ile balar.
Bu problem iin bir temel uygun zm (x
1
, x
2
, s
1
, s
2
) = (30, 0, 10, 0) eklinde verilsin. Buna gre x
1
ve s
1
temel, x
2
ve s
2
temel olmayan deikenlerdir. lemler aadaki sra izlenerek gerekletirilir:
1. Temel deikenler, temel olmayan deikenler cinsinden ifade edilir (kstlar yardmyla
temel deikenler zlr).
(2)den,
(3)
ve (1)den
(4)
elde edilir. (3)de elde edilen x
1
deeri (4)de yerine konursa,
(5)
elde edilir.
2. (3) ve (5)de elde edilen, temel deikenlerin (x
1
ve s
1
) deerleri ama fonksiyonunda yerine
konursa, (6) elde edilir.
Verilen bir problemde tm deikenler ama fonksiyonunda yer almayabilir. s
1
aylak deiken
olduu iin, belirtildii gibi ama fonksiyonundaki katsays sfrdr. x
2
ise temelde olmad iin ve
(6) nolu denklem de zaten ama fonksiyonunun temel d deikenler cinsinden ifadesi olduundan
yine x
2
olarak ilgili denklemde yer almtr.
74
Enb x
o
Enb x
o
Enb x
0
=
(6)
Bylece kstlar ve ama fonksiyonu srasyla (3), (5) ve (6) ile temel olmayan deikenler (x
2
ve s
2
)
cinsinden ifade edilmi olurlar. Ama fonksiyonunun u anki deeri 120dir. Temel olmayan
deikenlerin deeri ise 0dr.
3. Temel olmayan deikenler cinsinden elde edilmi olan ama fonksiyonu (6) yardmyla, temele
alnabilecek ve ama fonksiyonu deerini daha da iyiletirebilecek bir deiken olup olmadna
baklr. Mevcut durumda deerleri sfr olduu halde temelde olmayan x
2
ve s
2
nin ama
fonksiyonunda korunmasnn sebebi, deer almalar halinde x
0
daha iyiye gtrecek bir
katsaylarnn olup olmadn grebilmek iindir. rneimizde (6)da x
2
deikeninin
katsaysnn pozitif (+) olmas, x
2
nin temele alnmas halinde ama fonksiyonu deerinin
byyeceini gstermektedir. Bu durumda x
2
,
temele girecek deiken olarak belirlenir (Not:
Birden fazla deikenin katsays pozitif ise en byk olan alnr, iki tane ayn deer var ise
herhangi birisi alnr. Bu aamada enkkleme iin ise varsa negatif (-) katsayl deiken ama
fonksiyonu deerini daha da kltr demektir ve bu durumda birden fazla deiken szkonusu
ise, katsays daha kk olan deiken temele alnacaktr).
m kstl bir sistemin herhangi bir temel uygun zmnde m tane temel deiken olmaldr. Bu
durumda x
1
ve s
1
in temelde olduu, yukardaki gibi bir zmde iki temel deiken olmas
gerekmekte olup x
2
deikeninin de temele alnmas halinde, x
1
ve s
1
deikenlerinin birisinin
temelden kmas gerekmektedir. (3) ve (5)e gre, x
2
deer aldka x
1
ve s
1
in deerleri azalr.
4. Simpleks Algoritmasnda temelden kan deiken sfr deerine ularken, temelde kalmaya
devam eden deikenler ise pozitif deer almaldrlar. Buna gre sayfa 73de bulunan (3) ve
(5)den
(3)
(5)
x
1
ve s
1
in srasyla, x
2
nin hangi deeri iin sfr deerine ulaaca bulunmaldr. s
2
nin zaten sfr
deerinde olduunu hatrlayalm.
x
2
= 60 iin x
1
= 0, s
1
= -20; x
2
= 20 iin ise s
1
= 0, x
1
=20 olmaktadr. Bir temel deiken sfr
deerini alrken dierinin pozitif deerde kalmasn salayan durum x
2
= 20 olmas halidir. Bu durumda
temelde kalacak
temele 20 deeriyle girecektir. s
1
ise temelden kan deiken olmaldr.
Bundan sonraki ilemler yine batan bu yana olan admlar bu defa da, x
1
ve x
2
temel deikenler
alnarak tekrar edilir.
(1) ve (2) tekrar kullanlarak,
(1)
(2)
(1) nolu denklem -1 ile arplarak,
(7)
75
elde edilir. (2) ve (7) toplanarak,
(8)
bulunur. (1)den
denkleminde, (8)de bulunan x
1
deeri yerine konulduunda,
(9)
elde edilir.
(8) ve (9)dan x
1
ve x
2
deerleri nceki admda olduu gibi, temel olmayan deikenler cinsinden
bulunmu olurlar. Bu deerler ama fonksiyonunda yerine konursa
(10)
elde edilir.
Bylece ama fonksiyonu ve kstlar bu aamada da, u anki temel d deikenler olan,
cinsinden ifade edilmi olurlar. Ama fonksiyonunun yeni deeri 140 olup
deerleri
0dr. te yandan (10)da katsays hala pozitif (+) olan bir deikenin olmamas, ama fonksiyonu
deerinin daha da iyilemesinin (bymesinin) mmkn olmadn ve eldeki zmn eniyi zm
olduunu gstermektedir.
Simpleks Algoritmas bir balang temel uygun zm ile balar. Bu balang u nokta, s.73de
verilen (x
1
, x
2
, s
1
, s
2
) = (30, 0, 10, 0) gibi kstlar salayan herhangi bir u nokta olabilecei gibi, pratik
olarak balang modelde A katsaylar matrisinde yer alan mxm boyutundaki birim matrise (kendiliinden
varsa veya kstlar eitlik haline getirildiinde olumusa) kar gelen deikenler balang temel uygun
zm oluturmak zere alnrlar. Bu durumda ayn rnek iin
kstlar altnda
modelinin A katsaylar matrisi, srasyla x
1
, x
2
, s
1
ve
s
2
deikenlerinin kstlardaki katsaylarndan oluur
ve
eklinde elde edilir. Katsaylar birim matrisi oluturan s
1
ve s
2
deikenleri temel deikenler olmak
zere, (x
1
, x
2
, s
1
, s
2
) = (0, 0, 40, 60) noktas balang u nokta olarak alnp yukarda verilen ilemler
devam eder. Aslnda klasik Simpleks Algoritmasnn izledii yol da budur. Aksi halde ilk rnekte olduu
gibi kstlar salayan (varsa) bir balang u noktay deneme-yanlma ile bulmak sistematik bir yaklam
olmayacaktr.
76
Verilen modelin kstlar eitlik haline getirildikten sona A katsaylar matrisinde denklem says
boyutundaki birim matrise kar gelen deerler (rnek 4.3de 2x2lik birim matris) balang temel
deikenler olarak alnrlar. Simpleks Algoritmas mant tablolar yardmyla, denklemleri tmyle
yazmadan sadece katsaylar temelinde de yrtlebilir. Buna gre, s
1
ve s
2
nin balang temel
deikenler olduu duruma kar gelen zm ve izleyen ilemler, tablo yardmyla izleyen blmde
akland gibi gerekleir.
Simpleks Algoritmasn uygulayabilmek iin verilen denklem sisteminin kstlarnn etlik haline
getirilmesi gerekir. Bu durumda m denklem ve n deikenli sisteminde mxmlik bir birim matris
varsa, kar gelen deikenler balang temel deikenler olarak alnrlar. Bu nitede yalnzca bu
durumun saland rneklere yer verilip standart Simpleks Algoritmas anlatlmaktadr. te yandan
birim matrisin denklem sistemi eitlik haline getirildiinde kendiliinden elde edilmedii durumlarda,
sisteme, gerektii kadar yeni deiken eklentisiyle bu eksiklik giderilmektedir. Bu tr deikenlere yapay
deiken denip, bu durumda bilinen Simpleks Algoritmasnn zel bir hali uygulanr. Bu konuya bu
nitede yer verilmemektedir.
SMPLEKS TABLO
Tablo formatnda zm, nceki blmdeki rnek yardmyla aklanacaktr. lgili ama fonksiyonu,
eklinde ve belirtilen temel deiken takm (s
1
ve s
2
) balang zm alnarak aadaki tabloya
yerletirilir. Bu tablo oluturulurken x
0
ile gsterilen satr ama fonksiyonuna dier izleyen satrlar ise
(rnekte iki satr) problemin verilen kstlarna kar gelir. Ama fonksiyonu satr yukarda da
rneklendii gibi
formatnda alnr. Temel deikenler yerine, temel olmayan deikenler cinsinden, kstlarn zm ile
bulunan edeerleri yazldndan, temel deikenlere kar gelen katsaylar sfr olup, bu satr, ama
fonksiyonunun temel olmayan deikenler cinsinden ifadesidir. Temelde olmayan deikenlerin
katsaylarna gre de, bilindii gibi, temele girecek deikenin olup olmad deerlendirilir. Buna gre
balang tablo iin x
0
satrna, deikenlerin ama fonksiyonunda kar gelen katsaylar (
yaps
sebebiyle ters iaretlileri); kstlar iin ise, deikenlerin, dorudan denklemlerdeki katsaylar aada
grld gibi girilir. Modeldeki kst says ka ise tabloda, x
0
satrnn alt ksmnda o kadar sayda satr
yer alr.
rnekte, x
0
satr ama fonksiyonunun temel olmayan deikenler cinsinden ifadesi olup, burada x
1
deikeni temele girecek deiken olarak belirlenir (ama fonksiyonundaki katsaysnn -4 olmas,
fonksiyonunda bu deikenin katsaysnn pozitif (+) olmas demek olup, x
1
in temele alnmas
durumunda ama fonksiyonu deerinin byyeceini gstermektedir).
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 - 4 - 3 0 0 0
s
1
s
2
0
0
1
2
1
1
1
0
0
1
40
60
rnekte temelden kacak deikenin belirlenmesi iin yaplan deerlendirmenin bu aamadaki
karl ise yledir: Temele girecek deikenin altndaki stunda x
0
satr deeri olan -4ten sonra yer
alan stun
vektrdr. Sa taraf sabitleri (STS) olan
vektr bu stun vektrne blnerek
77
enkk deere kar gelen deiken temelden kacak deiken olarak alnr. Bu ilem, temelden kan
deikenin sfr deerine ulamasna karlk temelde kalacak deikenin de pozitif deerle kalmasn
salamaktadr.
enk
= 30 olup kar gelen s
2
deikeni, temelden kacak deikendir. Balang zm iin bu
ekilde, birim matrise kar gelen deikenler alndnda artk ilemler her zmde temel deikenlere
tabloda kstlar ksmnda kar gelen stunlarn da birim matrise dntrlmesi esasna dayanr. rnein
burada x
1
temele girecek s
2
temelden kacak deiken ise birim matris Inn s
2
deikenine kar gelen
stunu kaybedileceinden izleyen zme gemek, yeni temele giren x
1
deikeninin kstlara kar
gelen ksmdaki katsaylar olan
stununu temelden kan s
2
deikenine kar gelen
stununa
evirmektir. Bu ilem iin nce, nceki tabloda ikinci satrdaki tm deerler 2ye blnr ve aadaki
matris elde edilir.
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 - 4 - 3 0 0 0
s
1
?
0
0
1
1
1
1/2
1
0
0
1/2
40
30
Burada koyu renk ile gsterilen 1 deerine anahtar eleman denir. zleyen aamada ise ilk kst
satrnda x
1
e kar gelen 1 deeri sfrlanarak elde edilmek istenen
stunu oluturulur. Bunun iin
ikinci kst satr deerleri (-1) ile arplp birinci kst satr ile toplanr ve elde edilen sonu bu satra
yazlr, bu ilemin sonucunda aadaki matris elde edilir.
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 - 4 - 3 0 0 0
s
1
?
0
0
0
1
1/2
1/2
1
0
-1/2
1/2
10
30
zleyen zme gemede son ilem x
0
satrnda x
1
deikeninin altnda yer alan -4 deerini
sfrlamaktr. Bu ilem ama fonksiyonunu da temel olmayan deikenler cinsiden ifade etmektir. Bunun
iin yine anahtar eleman olan 1 deeri kullanlr. Bu deer ve satrdaki dier deerler 4 ile arplarak x
0
satr deerleri ile birebir toplanr ve sonular x
0
satrna yazlr. Elde edilen matris aadadr. Eniyilik
koullar salanmamaktadr. x
0
satrnda negatif deer (-1) vardr.
Simpleks Algoritmasnda buraya kadar olan ilemlere bir ardtrma denir. Ardtrma; bir zmn
eniyi zm olmamas halinde temele girecek ve kacak olan deikenlere karar verme, temele girecek
deikenin tabloda kstlar blmne kar gelen ksmndaki katsaylarnn birim matrisin ilgili stununa
dntrlmesi ve x
0
satrnda kar gelen deerinin sfrlanmas aamalarndan oluur.
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 0 - 1 0 2 120
s
1
x
1
0
0
0
1
1/2
1/2
1
0
-1/2
1/2
10
30
78
nceki aamaya benzer ekilde x
2
temele girecek deiken olarak belirlenir. Temelden kacak
deiken ise, enk
= 20 olup kar gelen s
1
deikeni, temelden kacak deikendir.
Bu aamada temele girecek deikenin bulunduu stunda, x
0
satr
dndaki deerlerintm 0 ise problemin snrsz zm var demektir. Mevcut
durumda bu deerler
olup, byle bir durum yoktur.
zleyen zme gemek, x
2
deikeninin kstlara kar gelen ksmdaki katsaylarn
temelden
kan s
1
deikenine kar gelen
stununa evirmektir. Bu ilem iin nce birinci satrdaki tm
deerler 2 ile arplr ve aadaki matris elde edilir. Bylece yine anahtar eleman olan ve tabloda koyu
renk ile gsterilen 1 deeri elde edilmi olur.
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 0 -1 0 2 120
x
2
x
1
0
0
0
1
1
1/2
2
0
-1
1/2
20
30
zleyen aamada ise anahtar eleman 1in altnda yer alan
deerini sfrlayabilmek iin, birinci satr
(-1/2) ile arplp ikinci kst satr ile toplanr ve sonu ikinci satra yazlr, bu ilemin sonucunda
aadaki matris elde edilir.
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 0 - 1 0 2 120
x
2
x
1
0
0
0
1
1
0
2
-1
-1
1
20
20
Son ilem nceki ardtrmada olduu gibi,
satrnda
deikeninin altnda yer alan -1 deerini
sfrlamaktr. Bunun iin yine anahtar elemann bulunduu birinci kst satrndaki deerler ile
satr
deerleri birebir toplanr ve elde edilen sonular
satrna yazlr. Elde edilen matris aadadr.
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 0 0 2 1 140
x
2
x
1
0
0
0
1
1
0
2
-1
-1
1
20
20
Bu ikinci ardtrmadan sonra tekrar, x
0
satrnda eniyilik koullarnn salanp salanmad kontrol
edildiinde, tm deerlerin sfr veya sfrdan byk olmas nedeniyle, eniyi zme ulalmtr ve
temele alnmas halinde ama fonksiyonu deerini daha iyiye gtrecek bir temel d deiken
bulunmamaktadr. En iyi zm =(20, 20, 0, 0) ve eniyi deer 140tr.
Buna gre lojistik firmas 2 tip trdan da 20er adet almaldr. Bu durumda toplam kapasite
20*3+20*4=140 ton olacaktr.
79
MATRS GSTERM, ENBYKLEME VE ENKKLEME N
RNEKLER
rnekteki matematiksel modele kar gelen denklem sistemi, A : Tm deikenlere kar gelen katsaylar
matrisi, X deiken vektr, b kaynak (sa taraf sabitleri) vektr iken,
olmak zere AX = b eklinde yazlabilir. Kar gelen matris arpmlar,
olarak gerekletirildiinde,
denklem sistemi yeniden elde edilir. Ama fonksiyonu da benzer ekilde,
eklinde tanmlanarak, olarak alnp
= (4, 3, 0, 0)
olarak elde edilir. Bylece dorusal karar modelinin
eklinde de ifade edilebilecei gsterilmi olur.
imdi matris gsterimi ve forml kullanm iin modelde gereken dier ayrmlar aklayalm:
Simpleks Algoritmasnda deikenler, nceki rnekte de grld gibi temel ve temel olmayan
olmak zere iki gruba ayrlrlar. Bu durumda,
X
B
: Temel deikenler vektr
X
R
: Temel olmayan deikenler vektr
olmak zere X vektr aadaki gibi iki paral olarak gsterilebilir.
Benzer ekilde, AX=b modelindeki A matrisi ile Enb x
0
=CX fonksiyonundaki C vektr de aadaki
gibi paralanabilir:
B: Temel deikenlere A katsaylar matrisinde kar gelen matris
R: Temel olmayan deikenlere A katsaylar matrisinde kar gelen matris
C
B
: Temel deikenlere Cde kar gelen katk vektr
C
R
: Temel olmayan deikenlere Cde kar gelen katk vektr
80
iken C = (C
B
, C
R
), A = (B,R) eklinde gsterilebilir.
nceki rnekte kullanlan Simpleks Tablonun herhangi bir zm iin edeeri, yukardaki yeni
matris ve vektr tanmlamalarna gre aadaki formlasyona karlk gelir. Bir baka deyile, herhangi
bir temel deiken takm verildiinde ardtrmalarla bulunan bir zm, yukarda verilen, kar gelen
matris tanmlamalar kullanlarak verilen formllerle de bulunabilir.
X
0
X
B
X
R
STS
X
0
1 0 C
B
B
-1
R - C
R
C
B
B
-1
b
X
B
0 I B
-1
R B
-1
b
rnek olarak, nceki rnekte s.78de (x
2
,
)in temelde olduu duruma kar gelen zm tablosu,
verilen formller kullanlarak, aadaki gibi de bulunabilirdi:
iken
B
-1
b =
C
B
B
-1
b =
=140
B
-1
R =
C
B
B
-1
R - C
R
=
(2, 1) (0, 0) = (2, 1)
Ters matris bulma ilemi aada aklanmaktadr.
81
Bulunan matrisler formllerde belirtilen yerlerine yazldnda, Simpleks Tablo ve s.78deki zm
aadaki gibi tekrar elde edilir.
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 0 0 2 1 140
x
2
x
1
0
0
0
1
1
0
2
-1
-1
1
20
10
Burada, yukarda grld gibi, ters matris bulma bilgisine ihtiya vardr. 2x2 boyutundaki bir
matrisinin ters matrisi
pratik olarak aadaki gibi bulunabilir:
rnek 4.4.
rnek 4.5. rnek 4.3de, x
1
ve s
1
in temelde olduu duruma kar gelen zm, forml (B
-1
b)
kullanarak bulunuz.
rnek 4.3de x
1
ve s
1
in temelde olduu duruma kar gelen ama
fonksiyonu deerini formlle bulunuz.
Bu blmde bir zm yntemi olarak aklanan Simpleks Algoritmasna, eniyilemede, zm
srecinin temelinde yatan matematiksel sreci aklamak, ayn zamanda, ileriki blmlerde bu konunun
uzants olarak ele alnacak olan duyarllk analizi ve ilikili baz konulara temel tekil etmesi sebepleriyle
yer verilmitir. Aslnda karar modellerinin zm iin gelitirilen eitli yazlmlar da bulunmaktadr.
LINDO, LINGO, GAMS gibi, rnekleri verilebilecek bu tr yazlmlarn yannda, hemen her bilgisayarda
hali hazrda bulunan alma tablosu program Microsoft Excelin zc (solver) modl ile bile belirli
byklkteki matematiksel modellere zm bulunabilmektedir.
Ama Fonksiyonunun Enkklenmesi
nceki blmlerde belirtildii gibi, Simpleks Algoritmasnda esas olan, verilen modelin ama
fonksiyonunu ve kstlarn, temel olmayan deikenler cinsinden ifade etmektir. Bylece temel d
deikenler sfr iken ortaya kan durum grlebilmi olup, temele alnmalar halinde daha iyi bir ama
fonksiyonu deerine ulalp ulalmayaca deerlendirilir. Bunun gstergesi olarak temelde olmayan bir
deikenin ama fonksiyonundaki katsays belirleyici olmaktadr. nceki rnekte ama enbyklemedir
ve grld gibi ilk ardtrmada temelde yer almayan
deikeninin ama fonksiyonu satrndaki
82
deeri olan -4, bu deikenin temele alnmas gerektiini gstermitir. Benzer ekilde devam eden
ilemler sonucunda, x
0
satrnda, temel olmayan deikenler arasnda katsays negatif olan bir deikenin
kalmamas, enbykleme iin eniyilik koullarnn salandn gstermektedir.
Verilen problem enkkleme olursa da benzer yaklam geerlidir. Fakat bu durumda temelde yer
almayan deikenler ierisinde ama fonksiyonu satrndaki katsays negatif deil pozitif olan deiken
ama fonksiyonu deerini azaltacandan, temele alnmaldr. Dier ilemler (temelden kacak deikeni
belirleme) ayn ekildedir. Enkkleme problemi iin eniyilik koullarnn salandnn gstergesi ise
x
0
satrnda, temelde olmayan deikenlerin hi birisi iin pozitif deerin olmamasdr.
Enkkleme in rnek
Ama fonksiyonunun enkkleme olduu durumda Simpleks Algoritmas, aadaki rnek zerinde
aklanacaktr.
rnek 4.6. Bir kargo iletmesi, mteri gnderilerini paketledii kutularnda, boluklar doldurmak ve
gnderileri sarsntdan korumak iin elyaf, kpk ve karton malzeme kullanmaktadr. Bir kg. elyaf ile 4
standart kutu boluu, 1 kg. kpk malzeme ile 8 standart kutu boluu doldurulabilmektedir. Bir kg.
karton malzeme ise bir standart kutuyu sabitlemek iin zel siparilerde kullanlmaktadr. Enaz 256
kutunun tamadaki boluunu doldurmaya yetecek kadar elyaf, kpk ve karton malzemeye ihtiya
duyulmaktadr. te yandan elyaf ve kpk malzemelerin birer kilogram srasyla 16 ve 32 cm
3
hacim
gerektirmekte olup, bu malzemeleri nemden korumak iin kullanlan zel konteynern hacmi 424 cm
3
tr.
Karton malzeme iin stoklamada zel bir gereklilik yoktur. Elyaf, kpk ve karton malzemenin kg.
fiyatlar srasyla 14, 16 ve 3 para birimidir. Toplam malzeme alm maliyetini enkkleyecek ekilde,
hangi malzemeden ka kg. alnmas gerektiini bulunuz.
Karar deikeni
: i. tip malzemeden alnacak miktar (kg.) (i = 1, 2, 3 elyaf, kpk ve karton malzeme)
olarak tanmlanr.
Kar gelen matematiksel model, kstlar ve ama fonksiyonu ile birlikte aadaki gibidir (karton
malzeme iin stok alan ihtiyac yoktur):
kstlar altnda
nceki rnekte olduu gibi, modelin Simpleks Algorimas ile zlebilmesi iin nce kstlarn eitlik
haline getirilmesi gerekir. eklindeki kstlarn eitlik haline getirilmesi iin kstn kk olan tarafna
pozitif (+) katsayl, eklindeki kstlarn eitlik haline getirilmesi iin ise kstn byk olan tarafna
negatif () katsayl yeni bir deikenin eklentisi gerekir. Buna gre yukardaki modelde her iki ksta
srasyla s
1
ve s
2
deikenlerinin eklenmesi ile model aadaki hale dnr:
s
1
ve s
2
deikenlerine srasyla artk ve aylak deiken denir.
kstlar altnda
83
Modelin A katsaylar matrisi yazlrsa, x
1
, x
2
, x
3
, s
1
ve s
2
deikenleri iin katsaylar matrisi
olup, grld gibi, srasyla x
3
ve s
2
deikenlerinin katsaylar birim matrisi (I) oluturmaktadr ve bu
deikenler balang temel deikenler olarak alnrlar.
Aslnda her probleme kar gelen matematiksel model, kstlar eitlik
haline getirildiinde Ada birim matris iermeyebilir. Bu gibi durumlarda denklem
sistemine balang zme kar gelmek zere, birim matrisi oluturacak ekilde,
gerektii sayda yeni deiken eklenir ve Simpleks Algoritmasnn zel bir hali kullanlr.
Bu blmde bu duruma yer verilmemekte, sadece standart Simpleks Algoritmas ele
alnmaktadr.
Simpleks Algoritmasn yukardaki enkkleme problemi iin uygulayalm.
Yukarda verilen modelin ama fonksiyonu, Simpleks Algoritmasnn tablo formatnda
olarak ifade edildiinden,
eklinde ve
balang temel deiken takm alnarak, aadaki tabloya yerletirilir. x
0
satrnn,
ama fonksiyonunun temel olmayan deikenler cinsinden ifadesi olduunu hatrlayalm.
x
0
x
1
x
2
x
3
s
1
s
2
STS
x
0
1 - 14 - 16 -3 0 0 0
x
3
s
2
0
0
4
16
8
32
1
0
-1
0
0
1
256
424
Eldeki bir zmn eniyi olup olmadn irdelemek iin, temel deikenlere kstlar ksmnda kar
gelen katsaylarn birim matrisi oluturmas ayrca x
0
satrndaki deerlerinin de sfr olmas gerekir. Bu
problemde temeldeki x
3
deikeninin x
0
satrndaki deeri olan -3n nce sfrlanmas gerekmektedir.
Bunun iin kstlar ksmndaki ilk satrn 3 ile arplp, deerlerinin, x
0
satr deerleri ile birebir
toplanmas gerekir. Bu durumla bazen karlalabilmektedir.
Bu ilemden sonra elde edilen tablo aadaki gibidir. Grld gibi x
3
=256 iin 256*3=768 olup
ama fonksiyonu deeri de salanmaktadr ve balang uygun zm iin gerekli zellikler elde
edilmitir. Artk eldeki zmn eniyi zm olup olmad snanabilir. Amacn enkkleme olduu
dnldnde, nceki rnein aksine x
0
satrnda yer alan ve temel d bir deikene kar gelen pozitif
bir deer eniyi zme ulalmadnn gstergesi olacaktr. Buna gre x
2
temele girecek deiken
olmaldr.
x
0
x
1
x
2
x
3
s
1
s
2
STS
x
0
1 - 2 8 0 -3 0 768
x
3
s
2
0
0
4
16
8
32
1
0
-1
0
0
1
256
424
84
Tabloda alt bloktaki iki satr verilen modelin kstlarna, ilk satr ise
ama fonksiyonuna kar gelmektedir. Burada yaplan ilemler aslnda temel deikenler
iin denklem sistemini zmektir.
Temelden kacak deiken iin enk
= 424/32 olup kar gelen s
2
deikeni, temelden
kacak deikendir. x
2
temele girecek s
2
temelden kacak deiken ise birim matris Inn
stunu
kaybedileceinden izleyen zme gemek; yeni temele giren x
2
deikeninin kstlara kar gelen
ksmdaki katsaylarn,
, temelden kan s
2
deikenine kar gelen
stununa evirmektir. Bu
ilem iin nce ikinci satrdaki tm deerler 32ye blnr ve aadaki matris elde edilir.
x
0
x
1
x
2
x
3
s
1
s
2
STS
x
0
1 - 2 8 0 -3 0 768
x
3
s
2
0
0
4
1/2
8
1
1
0
-1
0
0
1/32
256
53/4
Burada koyu ile gsterilen 1 deeri anahtar eleman dr. zleyen aamada ise ilk kst satrnda x
3
e kar
gelen 8 deeri sfrlanr, bunun iin ikinci kst satr deerleri (-8) ile arplp birinci kst satr ile
toplanr ve elde edilen sonu birinci satra yazlr, bu ilemin sonucunda aadaki matris elde edilir.
x
0
x
1
x
2
x
3
s
1
s
2
STS
x
0
1 - 2 8 0 -3 0 768
x
3
x
2
0
0
0
1/2
0
1
1
0
-1
0
-8/32
1/32
150
53/4
Son olarak, x
2
deikeninin x
0
satrnda altnda yer alan 8 deerinin sfrlanmas gerekir. Bunun iin ikinci
kst satrnn -8 ile arplp yine x
0
satr ile toplanmas gerekir. Elde edilen tablo aadaki gibidir.
x
0
x
1
x
2
x
3
s
1
s
2
STS
x
0
1 - 6 0 0 -3 -1/4 662
x
3
x
2
0
0
0
1/2
0
1
1
0
-1
0
-8/32
1/32
150
53/4
x
0
satrnda temelde olmayan deikenlerin (x
1
, s
1
ve s
2
) deerlerine bakldnda, tm negatiftir.
Ama fonksiyonunun enkkleme olduu hatrlanrsa, temel d deikenlerin hi birisinin temele
alnmas halinde mevcut durumda 662 olan ama fonksiyonu deerini daha da kltemeyecei, eniyilik
koullarnn saland ve eldeki zmn eniyi zm olduunu sylemek mmkn olur.
Ama fonksiyonu deerinin salamas da yaplrsa, Enb x
0
= 14x
1
+16x
2
+3x
3
fonksiyonu kullanlarak,
x
0
=
+ 3*150 = 662 deeri elde edilir.
Eldeki zm eniyi zmdr.
Kargo irketi 53/4 kg. kpk, 150 kg. ise karton almaldr. Grld gibi eniyi zmde x
1
= 0 olup,
deiken temel dnda kalm ve birinci tip dolgu malzemesi olan elyaftan hi alnmamasna karar
verilmitir. Eer mutlaka belirli bir miktar elyaf da (rnein enaz 10 kg) alnmas ngrlseydi, modele
x
1
eklinde yeni bir kst eklenmeliydi.
85
Problemin yukardaki gibi nc bir kst olsayd, Simpleks
Tabloda kstlara kar gelen ksmda satr yer alrd. Bu durumda bir zmden baka
bir zme geerken, birim matris 3*3 boyutunda olurdu.
Aadaki Simpleks Tablosu, bir enkkleme problemi iindir ve x
2
temele girecek deiken olarak belirlenmitir. Bundan sonraki aama iin ne
sylenebilir?
x
0
x
1
x
2
x
3
x
4
x
5
STS
x
0
1 -2 3 -1 0 0 240
x
4
x
5
0
0
4
7
-1
-7
2
9
1
0
0
1
102
2
86
zet
Gerek hayatta karlalan problemlerin
zmnde bavurulan yollardan birisi de
problemin gerekliliklerinin ve ulalmas istenen
amacn (enbyk kar, enkk maliyet vb.)
matematiksel ifadelerle gsterilmesidir.
Ardndan, eniyi deeri aratrlan
bilinmeyenlerin, bu matematiksel ifadelerin
oluturduu denklem seti yardmyla zm
aranr. Karar modeli denen bu matematiksel
yaplar, dorusal veya dorusal olmayan biimde
olabilirler. Szkonusu denklem sistemleri
zlerek deeri bulunmak istenen deikenlere
ise karar deikeni denir. Dorusal olan
problemlerin zmn bulmak her zaman daha
kolaydr. Bu nite, dorusal problemlerin
zm iin kullanlabilecek yntemlerden biri
olan Simpleks Algoritmasn aklamaktadr.
Dorusal bamsz m tane denklem ve n
deikenin olduu (mxnlik ve m<n) bir sistemin
zmnde, dier (n-m) tane deiken sfr
deerini almak zere, ancak denklem says (m)
kadar deikene deer bulunabilir. rnein iki
bilinmeyeni zmek iin enaz iki denklem
olmaldr ve bu denklemlerin dorusal bamsz
olmas gerekir. Bir baka deyile, denklemlerin
biri dierinin belirli bir kat vb. eklinde ifade
edilememelidir. Eer denklem says yeterli deil
ise, her seferinde, zlebilecek kadar deiken
dikkate alnr ve kalan deikenler sfr kabul
edilir. rnek olarak 2 denklem (m=2) ve 5
deikenin (n=5) olduu bir sistemde, her
seferinde 3 (n-m=3) deikene sfr deerini
vererek, denklem says (m=2) kadar deiken
iin zm bulunabilir. Burada, sfr deeri
verilen deikenlere temel d, deer almas iin
zme alnan deikenlere ise temel deiken
denir. Temel d deikenler sfr iken temel
deikenler iin zm elde edildiinde bulunan
bu zme temel zm denir. Bilindii gibi bir
dorusal karar probleminin en iyi zm bir u
noktadadr. Bir zmde, tm temel deikenler
sfr veya sfrdan byk deer aldysa bu zme
bir temel uygun zm denir ve bir temel uygun
zm ayn zamanda bir u nokta demektir.
rnein 5 deikenin 2 denklemin olduu bir
sistemde, birinci ve nc deikenler temel
alnarak (6, 0, 1, 0, 0) eklinde bir zm
bulunursa, bu zm bir temel uygun zm ve
ayn zamanda bir u noktadr. te yandan bir
deiken temelde olduu halde sfr deerini
alrsa, bu zm yine bir temel uygun zm
olmakla birlikte ayn zamanda da dejenere
(bozulmu) zm olarak isimlendirilir. Yuka-
rdaki rnekte birinci deiken temelde olduu
halde
(0, 0, 1, 0, 0) vektr elde edilseydi bu durumla
karlalrd.
Simpleks Algoritmas bir temel uygun zmden
balayarak, problemin tm kstlarn ve ama
fonksiyonunu bu temel uygun zmde temelde
yer alan deikenler cinsinden ifade eder. Daha
sonra ama fonksiyonu deerini daha iyiye
gtrecek bir deikenin olup olmadna baklr.
Eer byle bir deiken varsa temele alnr,
yerine, bir deiken de temelden kmaldr. Ayn
ilemler tekrar edilir ve bu srece bir ardtrma
denir.
Yukarda aklananlar Simpleks Tablo denen bir
tablo yardmyla veya bu ilemlere kar gelen
formller yardmyla da yaplabilir. Bir zmde
temelde yer alan tm deikenlerin, tabloda kar
gelen katsaylar birim matrisi oluturur.
Temelden kan bir deikenin yerine temele
girecek olan deikenin tabloda katsaylar,
temelden kan deikenin temsil ettii birim
matrisin ilgili stununun yerini alr. lemler bu
sebeple pratik olarak, temele giren deikenin
tabloda kstlar ksmnda kar gelen katsaylarn,
temelden kan deikenin katsaylarna
evirmekten oluur.
Yukarda bir ardtrma olarak tanmlanan bu
ilemler, temel deikenler iin birim matrisi
oluturma (temelden kan deikene kar gelen
stunu yeni temele girecek stun iin oluturma)
ve ama fonksiyonunu da temel olmayan
deikenler cinsinden ifade ederek, deerini daha
iyiye gtrecek bir temel d deikenin olup
olmadn snama eklinde devam eder. Temele
alnmas halinde ama fonksiyonu deerini daha
iyiye gtrecek deikenin bulunmamas halinde
eniyi zme eriilmi demektir. Bu ekilde
eniyilik koullarnn salanmas, temel olmayan
deikenlere
satrnda kar gelen tm
deikenlerin enbykleme iin pozitif,
enkkleme iin ise negatif olmas demektir.
Temele girecek deiken var iken, temelden
kacak deikenin bulunmas aamasnda sa
taraf sabitlerinin temele girecek deikenin
bulunduu stundaki deerlere oranlanmas
aamasnda, temele girecek deikenin kstlar
ksmnda altnda yer alan tm deerler sfr veya
sfrdan kk ise problemin snrsz zm var
87
demektir. Temelde yer ald halde sfr deerini
alan deiken ise problemin dejenere zm
olduunu gsterir.
Bu blmde bir zm yntemi olarak aklanan
Simpleks Algoritmasna, eniyilemede, zm
srecinin temelinde yatan matematiksel sreci
aklamak, ayn zamanda, ileriki blmlerde bu
konunun uzants olarak ele alnacak olan
duyarllk analizi ve ilikili baz konulara temel
tekil etmesi sebepleriyle yer verilmitir. Aslnda
karar modellerinin zm iin gelitirilen eitli
yazlmlar da bulunmaktadr. LINDO, LINGO,
GAMS gibi, rnekleri verilebilecek bu tr
yazlmlarn yannda, hemen her bilgisayarda hali
hazrda bulunan alma tablosu program
Microsoft Excelin zc (solver) modl ile
bile belirli byklkteki matematiksel modellere
zm bulunabilmektedir.
88
Kendimizi Snayalm
1. 2 tane dorusal bamsz denklem (m=2) ve 5
tane deikenin (n=5) olduu Ax=b eklindeki bir
denklem sisteminde bir zmde ka temel
deiken yer alr?
a. 3
b. 5
c. 2
d. 1
e. 4
2. 2 tane dorusal bamsz denklem ve 5 tane
deikenin olduu bir sistemde bir zmde ka
temel d deiken yer alr?
a. 3
b. 5
c. 1
d. 2
e. 4
3. Simpleks Algoritmas ile zlen bir
enbykleme probleminin bir zmnde, ama
fonksiyonu satrnda, temel olmayan 5 deikene
kar gelen deerler srasyla 2, -1, - 4, 1 ve 7dir.
Kanc deere kar gelen deiken temele
alnmaldr?
a. 1
b. 2
c. 3
d. 4
e. 5
4. Simpleks Algoritmas ile zmde en
bykleme iin tabloda temele girecek deiken
olsun. Bu deikenin altnda, kstlar ksmnda,
tm deerler negatif veya sfr ise aadakilerden
hangisi dorudur?
a. Problemin eniyi zm bulunmutur.
b. Problemin uygun zm alan botur.
c. Problemin snrsz zm vardr.
d. Problemin birden fazla eniyi zm vardr.
e. Problemin eniyi zm bir ardtrma sonra
elde edilecektir.
5. Aada, bir enkkleme problemi iin
verilen Simpleks Tabloya gore hangi deiken
temele alnmaldr?
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 2 3 0 0 0
s
1
s
2
0
0
1
2
4
5
1
0
0
1
6
7
a.
b.
c.
d.
e.
veya
6. Beinci soruda verilen tabloda, mevcut
durumda hangi deikenler temeldedir?
a.
ve
b.
ve
c.
ve
d.
e.
7. Beinci soruda verilen problemde ka kst
vardr?
a. 2
b. 3
c. 1
d. 4
e. 5
8. Beinci soruda verilen problemde,
iin
katsay -3 olup,
temele girecek deiken
olsayd, hangi deiken temelden kard?
a.
b.
c.
d.
veya
e.
veya
89
9. Aadakilerden hangisi
kstnn, Simpleks Algoritmas iin eitlik haline
getirilmi durumunu ifade eder?
a.
b.
c.
d.
e.
10. Aadakilerden hangisi yanltr?
a. Simpleks Algoritmas ile bir temel deiken
takmna kar gelen zm, tablo formatnda
ardtrma yaparak bulunabilecei gibi, sadece
formller kullanarak da hesaplanabilir.
b. Simpleks Algoritmas ile zmde, tablonun
alt ksmnda, kst says kadar satr yer alr.
c. Simpleks Tabloda kstlarn bulunduu
ksm, temel deikenlerin temel olmayan
deikenler cinsinden ifadesidir.
d. Simpleks Tabloda birinci satr ama
fonksiyonunu ifade eder.
e. Simpleks Tabloda ama fonksiyonu,
eklinde alnmtr.
Kendimizi Snayalm Yant
Anahtar
1. c Yantnz yanl ise Temel Uygun zm,
U Nokta balkl konuyu yeniden gzden
geiriniz.
2. a Yantnz yanl ise Temel Uygun zm,
U Nokta balkl konuyu yeniden gzden
geiriniz.
3. c Yantnz yanl ise Simpleks
Algoritmasna Olan htiya ve Bir rnek
zerinde Temel Admlar balkl konuyu
yeniden gzden geiriniz.
4. c Yantnz yanl ise Simpleks
Algoritmasna Olan htiya ve Bir rnek
zerinde Temel Admlar balkl konuyu
yeniden gzden geiriniz.
5. b Yantnz yanl ise Matris Gsterimi,
Enbykleme ve Enkkleme in rnekler
balkl konuyu yeniden gzden geiriniz.
6. b Yantnz yanl ise Simpleks
Algoritmasna Olan htiya ve Bir rnek
zerinde Temel Admlar balkl konuyu
yeniden gzden geiriniz.
7. a Yantnz yanl ise Simpleks
Algoritmasna Olan htiya ve Bir rnek
zerinde Temel Admlar balkl konuyu
yeniden gzden geiriniz.
8. c Yantnz yanl ise Simpleks
Algoritmasna Olan htiya ve Bir rnek
zerinde Temel Admlar balkl konuyu
yeniden gzden geiriniz.
9. b Yantnz yanl ise Simpleks
Algoritmasna Olan htiya ve Bir rnek
zerinde Temel Admlar balkl konuyu
yeniden gzden geiriniz.
10. e Yantnz yanl ise Simpleks Tablo
balkl konuyu yeniden gzden geiriniz.
90
Sra Sizde Yant Anahtar
Sra Sizde 1
temelde, (
temel d (sfr
deerinde)
1.denklem (-2) ile arplp, 2.denklem ile taraf
tarafa toplandnda,
olarak elde edilir.
Bulunan temel zm
(
= (-4, 5, 0, 0, 0) olup
bir temel uygun zm (u nokta)
deildir.
Sra Sizde 2
= C
B
B
-1
b =
Sra Sizde 3
Temele girecek x
2
deikeni iin kstlar ksmnda
yer alan tm deerler negatif (-1, -7) olduu iin
problemin snrsz zm vardr.
91
Yararlanlan Kaynaklar
Taha, H, (2003), Yneylem Aratrmas, 3.
Basm, (Baray . A., Esnaf . tarafndan eviri),
Literatr Yaynclk, stanbul.
Kara, ., (2000), Dorusal Programlama, Bilim
Teknik Yaynevi, stanbul.
92
Amalarmz
Bu niteyi tamamladktan sonra, dorusal karar problemlerinde
Eniyi zm sonras analiz trlerini aklayabilecek,
Eniyi zm sonras analiz yapabilecek ve yorumlayabilecek
bilgi ve becerilere sahip olabilirsiniz.
Anahtar Kavramlar
Simpleks Algoritmas
Eniyilik Koullar
Uygunluk Koullar
Duyarllk Analizi
Kaynak Vektr
Teknik Katsaylar
Katk Parametreleri
Yapsal Deiiklik
indekiler
Giri
Simpleks Algoritmasnda Eniyilik ve Uygunluk Koullar
Parametrelere Gre Duyarllk Analizi
Yapsal Deiikliklere Gre Duyarllk Analizi
Ayn Model zerinde Tm Duyarllk Analizi Trlerinin rneklenmesi
5
93
GR
Karar verme ortamlar farkl ekillerde olabilir. Temel olarak belirlilik, risk ve belirsizlik altnda karar
ortamlarndan szedilebilir. Parametrelerin deerlerinin bilindii durumlarda belirlilik, bilinmedii ama
tahmin edilebildii durumlarda risk, hibir ekilde deerlerin tahmin edilemedii ortamlarda ise
belirsizlik altnda karar vermeden bahsedilir.
Dorusal karar problemlerinde belirlilik varsaym bulunmaktadr, buna gre modele esas tekil eden
parametrelerin deerlerinin bilindii kabul edilmektedir. Fakat gerek hayat dinamik bir yapdadr.
Kontrol edilemeyen deikenler olarak tanmlanan parametreler szkonusudur ve deerleri de
deikendir. Bu sebeple problem zmleri iin gelitirilen karar modellerinde yer alan parametreler de
aslnda deiken deerler alrlar. Bu durumda elde edilen zmlerin bu deiikliklerden etkilenme
biimlerinin analiz edilmesi gerekmektedir. Bazen parametrelerin deerlerinin deimesinin yansra,
sistemlerde yapsal deiikliklerle de karlalabilir.
Duyarllk analizleri, dorusal karar problemlerinin zm elde edildikten sonra, modelde meydana
gelebilecek, parametrelere bal veya yapsal deiiklikler karsnda, eldeki eniyi zmn bundan nasl
etkileneceini veya eldeki zmn korumas iin parametrelerin hangi aralklarda deer almalar
gerektiini bulmak amacyla yaplan analizlerdir.
SMPLEKS ALGORTMASINDA ENYLK VE UYGUNLUK
KOULLARI
Simpleks Algoritmasnda nceki blmlerde de belirtildii gibi ama fonksiyonunun enbykleme veya
enkkleme olmasna gre, eniyilik koulunun salanp salanmad snanarak problemin zmne
ulald veya bir sonraki aamann aratrlmas gerektii sonucuna varlr. Buna gre, rnein, bir
dorusal karar modelinin Simpleks Algoritmas ile zm srasnda, temel deikenlerin temel olmayan
deikenler cinsinden ifadesi olan ama fonksiyonu (tabloda birinci satr) satrnda, temel olmayan tm
deikenlere kar gelen deerler sfr veya sfrdan byk ise, enkkleme iin ise szkonusu tm
deerler sfr veya sfrdan kk ise eniyi zme ulalm demektir. Aksi halde her iki durum iin de
temele girecek ve kacak deikenler belirlenerek bir sonraki zm aratrlr.
Simpleks Algoritmas, aadaki tanmlamalar nda ve aada verilen tablo formatnda
uygulandnda eniyilik koullar iin C
B
B
-1
R - C
R
vektrnn deeri dikkate alnr.
X
B
: Temel deikenler vektr
X
R
:Temel olmayan deikenler vektr
olmak zere X vektr aadaki gibi iki paral olarak gsterilebilir.
Duyarllk Analizi
94
Benzer ekilde;
AX = b
modelindeki A matrisi ile Enb x
0
= CX fonksiyonundaki C vektr de aadaki gibi paralanabilir :
B : A katsaylar matrisinde temel deikenlere kar gelen alt matris
R : A katsaylar matrisinde temel olmayan deikenlere kar gelen alt matris
C
B
: C katk vektrnde temel deikenlere kar gelen vektr
C
R
: C katk vektrnde temel olmayan deikenlere kar gelen vektr
iken
C = (C
B
, C
R
), A = (B,R) eklinde gsterilebilir.
X
0
X
B
X
R
STS
X
0
1 0 C
B
B
-1
R - C
R
C
B
B
-1
b
X
B
0 I B
-1
R B
-1
b
Bilindii gibi Simpleks Algoritmas, bir temel uygun zm (deikenlerin sfr veya sfrdan byk
deer ald) ile balar ve bu zm eniyilik koullarn salamyorsa izleyen zmn de temel uygun
zm olmasn salayacak yapdadr. Bu gereklilik ise uygunluk koulu olarak adlandrlr. Bir baka
ifadeyle uygunluk koulu iin de B
-1
b vektrnn deeri dikkate alnr.
Yukardaki aklamalar nda, bir dorusal karar modelinin eniyi zm elde edildikten sonra,
ama fonksiyonunda veya kstlarda deikenlere kar gelen katsaylarda (C veya R vektrlerinde)
olabilecek deiikliklerden, eniyilik koullar etkilenir. Modelin kstlarnda yer alan sa taraf sabitlerinde
yani kaynak vektrnde (b) deiiklik olmas durumundan ise uygunluk koullar etkilenir.
Bu durumlarda duyarllk analizi yapmak; bir parametrenin yeni deeri iin eniyilik veya uygunluk
koullarnn hala salanp salanmadn deerlendirmektir. Baz durumlarda da duyarllk analizi, eldeki
zmn, ilgilenilen parametrenin deerinde hangi aralklarda bir deiim olmas halinde korunacan
bulmak eklinde de olabilir.
Ek olarak, parametrelerde bir deiiklik olmamakla birlikte, modele, yeni bir kst veya yeni bir
deiken eklemek gibi yapsal deiikliklerle de karlalabilir. Yeni kst eklendiinde bu kstn eldeki
zmle salanp salanmad, yeni deiken eklendiinde ise, bu deikenin temele girmeye aday veya
eniyilik koullarn koruyarak temel dnda kalacak bir deiken olma durumlarndan hangisine uyduu
aratrlr.
zleyen blmlerde, yukarda bahsedilen; parametrelere gre ve yapsal deiiklikler, rneklerle ve
ayrntl olarak aklanmaktadr.
PARAMETRELERE GRE DUYARLILIK ANALZ
Bu analizler, yukarda belirtildii gibi, katk parametrelerine, kaynak vektrne veya teknik katsaylara
gre yaplr.
Katk Parametresindeki Deiime Gre Duyarllk Analizi
Verilen bir problemde, katk parametreleri olan C
B
veya C
R
deiebilir.
Temelde yer alan bir deikene kar gelen katk vektr (C
B
) deitiinde Simpleks Tabloda
satrnda temel d tm deikenlere kar gelen deerler (C
B
B
-1
R - C
R
) bu durumdan etkilenir. Bu
deiiklikler iki trl olabilir: Parametrenin deerinde belirli bir deiiklik olur ve bu durum analiz edilir
veya parametrenin deerinde hangi aralktaki bir deiim iin eldeki zmn korunaca (veya
deiecei) belirlenir.
95
Bu analizi rneklemek iin nite 4de rnek 4.3de verilen lojistik firmas ara alm problemini
hatrlayalm:
Bir lojistik firmas ara filosunu geniletmek zere yeni trlar almay planlamaktadr. Dnlen iki
farkl model szkonusudur. Her iki model srasyla 4 ve 3 ton birim tama kapasitesine sahiptir. Yeni
ara almna ayrlabilecek bte en fazla 6.10
6
. olup birinci ve ikinci tp trlarn birim fiyatlar srasyla
200.10
3
ve 100.10
3
. dr. Firma en fazla 40 yeni ara satn alabilecektir.
Yeni aralarn toplam tama kapasitesini enbykleyecek ekilde hangi tip trdan ka adet alnmas
gerektii bulunmak istenmektedir.
Karar deikeni
i. tip trdan satn alnacak adet
olarak tanmlanr.
Kar gelen matematiksel model, kstlar ve ama fonksiyonu ile birlikte aadaki gibidir:
kstlar altnda
En iyi zmn elde edildii son Simpleks Tablosu aada verilmektedir. s
1
ve s
2
nin modelin
kstlarn eitlik haline getirmek iin kullanlan aylak deikenler olduunu hatrlayalm.
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 0 0 2 1 140
x
2
x
1
0
0
0
1
1
0
2
-1
-1
1
20
20
Temelde yer alan deikenin katk parametresinin deerinde deiim olmas
rnek olarak yukardaki son tabloda
olmak zere
deikeninin katk parametresi olan c
2
= 3 deerinin
= 5 olmas halinde,
olup yeni
haliyle
B
-1
R - C
R
vektr u ekilde hesaplanr:
-
96
Ama fonksiyonunun enbykleme olduu hatrlanrsa, yeni durumda temel olmayan deikenler iin
satr deerleri artk eniyilik koullarn salamamaktadr. s
2
deikenine kar gelen deer, (-1) ,
negatif olup, bu deikenin temele alnmas halinde ama fonksiyonunun mevcut durumda 140 olan
deeri daha da byyebilecek demektir. Bu durumda ilemler s
2
deikeni temele alnarak bilinen
Simpleks Algoritmas admlar ile devam eder.
Yukardaki rnekte
deikeninin katk parametresi olan c
2
= 3
deerinin c
2
= 1 olmas halinde eldeki eniyi zm korunur mu ? Aratrnz.
Temelde yer alan deikenin katk parametresinin deerindeki deiimin eniyi zm
koruyacak aralnn bulunmas
Yukarda,
deikeninin katk parametresi olan c
2
= 3 deerinin c
2
=5 olmas hali iin yaplan
analizin, deiim miktarna bal olarak gerekletirilmek istenmesi durumunda,
, c
2
deki
deiim
miktar olmak zere, enbykleme iin, eldeki zmn korunmas aadaki zelliin salanmas
halinde mmkn olmaktadr.
Bu durumda yeni
vektr
olmak zere,
-
= ( 2 ( 3+
) - 4, -3 -
+ 4)
-3 -
-1
in eldeki zm korunur. Mevcut durumda C
2
= 3 olan deer 1 br. azalabilir veya artabilir.
,nin c
2
deki
deiim miktar olduu hatrlanrsa, nceki rnekte, c
2
nin deerinin 3den 5e
arttrlmas, bu parametrede 2 birimlik deiim anlamna gelmekteydi. Yaplan analizde de bu deiiklik
ile en iyilik koullarnn korunmayaca ve
deikeninin temele alnmas gerektii sonucu elde
edilmitir. Belirtilen deiim miktar burada da grld gibi, eniyi zmn korunmas iin gereken
araln dndadr. Eniyi zm c
2
nde ancak 1 birimlik art veya azal durumlarnda korunacaktr.
Temelde yer almayan bir deikene kar gelen katk vektr (C
R
) deitiinde ise Simpleks
Tabloda x
o
satrnda sadece C
R
vektrnde ve bu vektrde de sadece katk parametresi deien temel
d deikene kar gelen deer bu durumdan etkilenir. Bu deiiklik de yine iki trl olabilir.
Parametrenin deerinde belirli bir deiiklik olur ve bu deiikliin eniyi zm deitirip
deitirmedii aratrlr veya parametrenin deerinde hangi aralktaki bir deiim iin eldeki zmn
korunaca (veya deiecei) belirlenir.
Temelde yer almayan deikenin katk parametresinin deerinde deiim olmas
Bu bal da daha nce ele alnan, nite 4, rnek 4.6 zerinde gsterelim.
Bir kargo iletmesi, mteri gnderilerini paketledii kutularnda, boluklar doldurmak ve gnderileri
sarsntdan korumak iin elyaf, kpk ve karton malzeme kullanmaktadr. Bir kg. elyaf ile 4 standart kutu
boluu, 1 kg. kpk malzeme ile 8 standart kutu boluu doldurulabilmektedir. Bir kg. karton malzeme
ise bir standart kutuyu sabitlemek iin zel siparilerde kullanlmaktadr. Enaz 256 kutunun tamadaki
boluunu doldurmaya yetecek kadar elyaf, kpk ve karton malzemeye ihtiya duyulmaktadr. te
yandan elyaf ve kpk malzemelerin birer kilogram srasyla 16 ve 32 cm
3
hacim gerektirmekte olup, bu
97
malzemeleri nemden korumak iin kullanlan zel konteynern hacmi 424 cm
3
tr. Karton malzeme iin
stoklamada zel bir gereklilik yoktur. Elyaf, kpk ve karton malzemenin kg. fiyatlar srasyla 14, 16 ve
3 para birimidir.
Toplam malzeme alm maliyetini enkkleyecek ekilde, hangi malzemeden ka kg. alnmas
gerektiini bulunuz.
Karar deikeni
: i. tip malzemeden alnacak miktar (kg.) (i = 1, 2, 3 elyaf, kpk ve karton malzeme)
olarak tanmlanr.
Kar gelen matematiksel model, kstlar ve ama fonksiyonu ile birlikte aadaki gibidir:
(Karton malzeme iin stok alan ihtiyac yoktur)
kstlar altnda
Problemin eniyi zmne kar gelen tablo aadaki gibidir:
x
0
x
1
x
2
x
3
s
1
s
2
STS
x
0
1 - 6 0 0 -3 -1/4 662
x
3
x
2
0
0
0
1/2
0
1
1
0
-1
0
-8/32
1/32
150
53/4
lgili vektrlerin, yukardaki son tablo iin aadaki gibi olduu hatrlanacak olursa,
Temel dnda yer alan
deikeninin katk parametresi olan c
1
= 14 deerinin c
1
= 15 olmas
halinde, yeni haliyle,
= (15, 0, 0) olup,
B
-1
R -
vektr u ekilde hesaplanr.
-
= (-7, -S, - 1 4)
98
Ama fonksiyonunun enkkleme olduu hatrlanrsa, temel olmayan deikenler iin
satr
deerleri yeni durumda da eniyilik koullarn salamaktadr.
Dikkat edilirse, mevcut zmde (-6, -S, -14) eklinde olan C
B
B
-1
R - C
R
vektr, yeni durumda (-
7, -S, -14) olarak elde edilmi ve sadece
deikenine kar gelen deer deimitir. Katk
parametrelerine gre duyarllk analizinde, katks deien deiken eer temel d ise, bu durumda ama
fonksiyonu satrnda sadece o deikene kar gelen deer iin ilemlerin yaplmas yeterli olacaktr. Bu
da R matrisi ve C vektrnde sadece o deikenle ilgili vektrn gznnde bulundurulmas ve ilemin
-
= - 7
eklinde yaplmasn gerektirir.
deikeninin katk parametresi olan c
1
= 14 deerinin c
1
= 6
olmas halinde eldeki zm korunur mu?
Temelde yer almayan deikenin katk parametresinin deerindeki deiimin eniyi zm
koruyacak aralnn bulunmas
Yukarda, nite 4 rnek 4.6 da,
deikeninin katk parametresi olan c
1
= 14 deerinin c
1
=15
olmas hali iin yaplan analizin, deiim aralna bal olarak gerekletirilmek istenmesi durumunda,
, c
1
deki
deiim miktar olmak zere, enkkleme iin, eldeki zmn korunmas, aadaki
zelliin salanmas halinde mmkn olmaktadr.
0
= 8 14 -
iin eldeki zm korunur.
in c
1
deki
deiim miktar olduu hatrlanrsa, en fazla 6 birime kadar azalma halinde eniyilik
koullarnn korunaca anlalmaktadr. O halde mevcut durumda 14 olan c
1
deeri, 8 e kadar azalabilir.
Art miktarnda ise snr yoktur, c
1
ne kadar byrse de eniyilik koullar korunmaya devam edecektir.
Nitekim deiim miktarna gre analizin yapld nceki durumda da, katk parametresi sadece 1 birim
deimi (14den 15e karlm), bu deiim yukarda bulunan aralk ierisinde olduundan, eniyilik
koullar korunmutur.
Sa Taraf Sabitindeki Deiime Gre Duyarllk Analizi
Bir problemde, sa taraf sabitleri vektr, b, deiebilir. Bu durumda Simpleks Tabloda karar
deikenlerinin deerlerini gsteren
B
-1
b
vektr etkilenir.
Simpleks Algoritmas bir temel uygun zmle (temel deikenler deerinde) balayp baka bir
temel uygun zme getiinden, bu deiikliin uygunluk koulu olan B
-1
b salamas
gerekmektedir. Bir baka deyile, sa taraf sabitleri de denen kaynak vektrnde bir deiim, eniyilik
deil uygunluk koullarna yansr.
99
Bu analiz de yine nite 4, rnek 4.6 (kargo iletmesi) kullanlarak rneklenecek olursa, mevcut
durumda kaynak vektr,
=
eklindedir.
Burada ikinci ksta kar gelen sa taraf sabiti deeri,
, kargo malzemelerinin depoland
konteynern hacmi ile ilgili kapasite olup, bu deerin 430 cm
3
e kmas durumunu inceleyelim.
Uygunluk koulunun korunup korunmadn snayabilmek iin B
-1
koulu kontrol
edilmelidir. Bir Simpleks Tabloda balangta birim matrisi oluturan deikenlere, son tabloda,
tablonun kstlar ksmnda kar gelen matris,
i vermektedir. Bu durumda rnek 4.6da
balangtaki temel deikenlerin,
olduu hatrlanrsa, bu deikenlere son tabloda kar gelen matris,
=
olup,
B
-1
olduundan uygunluk koullar korunmaktadr.
Katk parametreleri iin aklanan duyarllk analizinde olduu gibi, sa taraf sabitlerindeki deiimin
hangi aral iin eldeki zmn korunduu da bulunabilir. Bu durumda yukardaki rnekte,
nn
belirli bir deeri iin deil, deiim aral iin ilemler u ekilde yaplmaldr :
deki deiim miktar olmak zere,
olmaldr.
256 (
600
- 424
600
aral iin uygunluk koullar korunacaktr.
100
nceki rnekte, ilgili sa taraf sabitinin deerinin 424den 430a kt ve uygunluk koullarnn
korunduu hatrlanrsa, 6 birimlik artn da yukarda bulunan snrlar ierisinde olduu grlecektir.
Parametrelere bal duyarllk analizlerinin bir dier tr de, deikenlere modelin kstlarnda kar
gelen teknik katsaylarda deiim olmas durumudur. Fakat bir deikene kstlarda kar gelen katsaynn
deimesi, ilgili deikenin temelde olup olmamasna gre, srasyla B veya R vektrnde deiim
demektir. Bu durum ise, ya B
-1
matrisine ya da dorudan R vektrne yansma olup, C
B
B
-1
R - C
R
vektrne ve eniyilik koullarna yansyacaktr. Ama fonksiyonunun durumuna gre, deiimin eniyilik
koullarn koruyup korumad veya deiimin hangi aral iin eniyi zmn korunaca yine
yukarda rneklendii ekilde bulunabilir. zleyen blm bu konuyu rneklemektedir.
Yukardaki rnekte
= 258 olmas durumunu analiz ediniz.
Teknik Katsaylardaki Deiime Gre Duyarllk Analizi
Bu deiim, yukarda belirtildii gibi, bir ksttaki teknik katsays deien bir deikenin, temelde veya
temelde olmamasna gre farkl ekilde analiz edilmelidir.
Temel d bir deikenin bir ksttaki teknik katsaysnn deimesi,
R matrisinin szkonusu deikene kar gelen vektr deieceinden, bu deiiklik, C
B
B
-1
R - C
R
vektrnn sadece ilgili deikene kar gelen deerine yansyacaktr. Yeni durumda, bulunan deerin
eniyilik koullarn hala salayp salamad aratrlr.
nite 4, rnek 4.6daki problemi ele alalm. Eniyi zmde temel ve temel olmayan deikenlere
kar gelen deerler ve katk vektrleri aadaki gibidir :
=
ve
Teknik katsaynn deerinde deiim olmas
deikeninin birinci ksttaki katsays olan 4 deerinin 5 olmas durumu analiz edilecek olursa, bu
deiiklik C
B
B
-1
R - C
R
vektrnde sadece
deikenine kar gelen deere yansr. lgili vektrn bu
deikene kar gelen deeri,
C
B
B
-1
14
= ( 1S - 4) - 14
= - S
olarak bulunur. Ama enkkleme olduundan eldeki zm korunmaktadr.
Temelde yer almayan deikenin teknik katsaysnn deerindeki deiimin eniyi zm
koruyacak aralnn bulunmas
nceki balklarda olduu gibi, bu deiiklik iin de, deiimin hangi aral iin eldeki zmn
korunaca bulunabilir. , X
1
deikenine birinci kstta kar gelen katsaydaki deiim miktar olsun.
101
Bu durumda,
C
B
B
-1
- C
14 0
olmaldr.
= ( S, (-8S2)*S + 16S2)
14 u
= (S , (-S4 + 24))
14 0
= (S , -14 )
14 u
= (S - 4 ) 14 u
= 12 4 14 u
= 6
= 2
olmas durumunda, eldeki zm korunur.
Bulunan aralk,
deikeninin birinci ksttaki katsays olan 4 deerinin en fazla 2 birim
artabileceini, azal miktarnda ise snr olmadn gstermektedir. Bu durumda nceki analizdeki 1
birimlik artn, belirtilen aralkta olmas sebebiyle eniyilik koullarn koruyaca grlmektedir.
Temelde yer alan bir deikenin bir ksttaki teknik katsaysnn deimesi halinde ise,
szkonusu deiiklik B matrisinin, dolaysyla B
-1
matrisinin deimesi anlamna gelmektedir. Bu
durumda yeni B
-1
matrisi bulunup, C
B
B
-1
R - C
R
vektrnn eniyilik koullarn deiiklik durumunda da
salayp salamad aratrlmaldr.
Temelde yer alan deikenin teknik katsaynn deerinde deiim olmas
Yukardaki problemde, temelde yer alan
deikeninin birinci ksttaki katsays olan 8 deerinin 9
olmas durumu analiz edilecek olursa, yeni durumda vektr;
B =
olup
=
olarak bulunur.
C
B
B
-1
R - C
R
=
-
= (S, -11S2)
-
= (1S2, - S, -11S2) - (14, u, u)
= ( -1S2, - S, -11S2)
Bu durumda yeni C
B
B
-1
R - C
R
vektrne gre eniyilik koullar korunmaktadr.
Teknik katsaynn deerindeki deiimin eniyi zm koruyacak aralnn bulunmas
Yukardaki analiz, deiim aral iin yaplmak istenirse, bu durumda, B matrisindeki deiim ye
bal olmaktadr. Yeni haliyle B ve
matrisleri de aadaki gibi bulunur.
102
B =
olup
=
Eniyilik koullar aadaki durumda korunacaktr:
C
B
B
-1
R - C
R
=
0
koulunu salayan deeri aratrlmaldr.
=
0
Yukardaki eitsizliklerin ortak zm, youn bir ilem yk gerektirmektedir. Bu ilemler
gerekletirildiinde, herhangi bir azaln eniyilik koullarn bozaca, iin ise eniyilik
koullarnn korunaca ortaya konmutur. Bir baka deyile, szkonusu parametrenin deerinde 1/3
birim ve daha fazla arta izin verilmektedir. Nitekim sayfa 101de
deikeninin birinci ksttaki
katsays olan 8 deerinin 9 olmas durumu analiz edildiinde, bu deiikliin eniyilik koullarn
koruduu sonucuna varlmt.
Teknik katsaylarn deerlerindeki deiim, aslnda ikil (dual) deikenler ile de analiz edilebilir.
Burada yer verilmeyen bu ilemler, bu tr analiz iin, daha kolay ve pratiktir. Fakat basitce, bir deiimin
eniyilik koullarna yansmas ikil modelde de uygunluk koullarna yansmas demektir. Bir temel
deikene R vektrnde kar gelen bir teknik katsaynn deiiminin eniyilik koullarn korumas, kar
gelen ikil modelde, ilgili deikenin katsaylarndan hareketle yazlan ikil kstn uygunluk koullarn
salamas anlamna gelmektedir. Analiz bu ynde yaplrsa zme daha pratik bir biimde eriilecektir.
YAPISAL DEKLKLERE GRE DUYARLILIK ANALZ
Bir dorusal karar probleminin zm elde edildikten sonra, modelde, bazen yapsal deiiklikler
olabilir. Bu deiiklikler yeni bir kstn veya yeni bir deikenin eklenmesi ekillerinde ortaya kabilir.
Duyarllk analizleri eniyi zm sonras yaplan analizler olduundan, yeni bir kstn eklenmesi
durumunda, eldeki zmn bu kst da salayp salamadnn incelenmes gerekmektedir.
Salanyorsa baka bir ileme gerek olmayp; yeni kst eldeki zm iin salanmyorsa, bu durumda, bu
kst da ekleyip varsa yeni zm bulunmaldr.
Yeni bir deiken eklenmesi durumunda ise u yol izlenmelidir: Bir karar deikeni bir zmde, ya
temelde ya da temel dnda yer alr. Bu durumu belirleyen zellik ise ilgili deikenin temele alnmas
halinde ama fonksiyonu deerini daha da iyiletirip iyiletirmeyeceidir. Deikene
satrnda kar
gelen deer bu durumun gstergesidir.
zleyen blm, srasyla bu analizlere yer vermektedir.
Yapsal deiiklikler iin nite 4de verilen rnek 4.3 hatrlayalm.
Bir lojistik firmas ara filosunu geniletmek zere yeni trlar almay planlamaktadr. Dnlen iki
farkl model szkonusudur. Her iki model srasyla 4 ve 3 ton birim tama kapasitesine sahiptir. Yeni
ara almna ayrlabilecek bte en fazla 6.10
6
. olup birinci ve ikinci tp trlarn birim fiyatlar srasyla
103
200.10
3
ve 100.10
3
. dr. Firma en fazla 40 yeni ara satn alabilecektir. Yeni aralarn toplam tama
kapasitesini enbykleyecek ekilde hangi tip trdan ka adet alnmas gerektiini bulmak istemektedir.
Karar deikeni
X
i
: i. tip trdan satn alnacak adet
olarak tanmlanr.
Kar gelen matematiksel model, kstlar ve ama fonksiyonu ile birlikte aadaki gibidir:
kstlar altnda
Problemin zm sonucunda elde edilen son Simpleks Tablosu ise u ekilde elde edilmitir.
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 0 0 2 1 140
x
2
x
1
0
0
0
1
1
0
2
-1
-1
1
20
20
Yeni Kst Eklentisi
Yukardaki problemde, iletme, tm aralarn ayn gn kullanlabilecei dncesiyle, elinde bulunan
toplam 82 srcnn yeterli olabilecei sayda tr satn almas gerektiini farketmitir. Birinci tip tr daha
ok uzun yollar iin kullanlacandan birisi yedek olmak zere iki src, ikinci tip tr iin ise tek src
gerekmektedir. Bu durumda modele,
kstnn eklenmesi gerekmektedir. zleyen ilem, eldeki zmn bu kst salayp salamadn
incelemektir.
Problemin eniyi zmnde temel deikenler,
deerini almlardr. Buna gre,
olup, eldeki zm yeni kst iin de geerli olabilmektedir. Alnacak 40 ara iin 60 src gerekecek
olup, mevcut 82 src yeterli olacaktr.
Bu rnek iin elde daha az sayda srcnn, rnein 50 adet, olmas durumunda, mevcut zmn
korunamayaca ve yeni bir zmn bulunmas gerektiini sylemek gerekirdi.
104
Not: Yeni zm gerektiinde, problem en bandan yeni kst da dikkate alnarak zlebilecei gibi;
eldeki son tabloya; eitlik haline getirilmi yeni kstn ve gerekliyse birim matrisin oluturulmas iin
aylak veya artk deikenin ve birim matrisin kar gelen ilgili stununun eklenmesi sonrasnda,
problemin zmne izleyen ardtrma ile de devam edilebilir.
Yeni Deiken Eklentisi
Lojistik firmasnn nc tip bir ara almn daha gznnde bulundurduunu dnelim.
Yeni tip aracn fiyat 50.
ve birim kapasitesi 2 ton olsun.
Bu durumda problemin yeni matematiksel modeli aadaki gibi olmaktadr.
X
3
: 3 tip trdan satn alnacak miktar olmak zere
kstlar altnda
Yeni deiken iin kstlardaki katsaylarndan oluan
vektr ise u ekildedir:
= 2 olduuna gre, yeni durumun eniyi zme yansmasn deerlendirebilmek iin
C
B
B
-1
deerinin bulunmas gerekmektedir.
= 2
C
B
B
-1
- 2
= (2, 1)
- 2
= u.S
Bulunan deer, yeni deikenin ama fonksiyonu satrna kar gelen deeridir. 0.5 0 olduundan,
ama fonksiyonunun enbykleme olduu hatrlanrsa, yeni deiken eniyilik koullarn korumakta olup,
temele alnmas halinde ama fonksiyonu deerini daha iyiye gtremeyecektir.
Lojistik firmas rneinde, karar deikenlerinin, doru modelleme
asndan tamsay olarak tanmlanmas gerekmektedir. Bu blmde ayn rnein
duyarllk analizi amacyla kullanmnda, verilen modelin dorusal olduu varsaylmtr.
Nitekim tamsay koulu olduunda da bir problem nce bu koul gzard edilerek
zlebilmekte, gerekliyse daha sonra tamsay kouluna dnk algoritmalara
geilmektedir. Burada problemin tamsay zm bulunabilmitir.
105
AYNI MODEL ZERNDE TM DUYARLILIK ANALZ
TRLERNN RNEKLENMES
Bu blmde, yukarda aklanan tm duyarllk analizi trleri, yeni bir problem zerinde, birer kez daha
rneklenmektedir.
Aada bir dorusal karar modeli ve eniyi zmne kar gelen son simpleks tablo verilmektedir:
kstlar altnda
s
1
ve s
2
, modelin kstlarn eitlik haline getirmek iin kullanlan aylak deikenlerdir.
x
0
x
1
x
2
s
1
s
2
STS
x
0
1 0 0 8/6 1/3 32/3
x
2
x
1
0
0
0
1
1
0
2/3
-1/3
-1/3
2/3
4/3
10/3
Son tablodaki zme kar gelen vektrler aadaki gibidir:
=
Not: Yukardaki son tabloda, temel dndaki deikenler olan
ve
, modele balangta eklenen
aylak deikenler olup ilk zmde birim matrisi ( I ) oluturmular ve ayn zamanda balang u
noktaya da kar gelmilerdir. te yandan, gelinen son aamada, temel dnda olmalar sebebiyle, A
matrisinde kar gelen katsaylar da tanm gerei, temel olmayan deikenlere kar gelen katsaylar
matrisi olan R yi vermektedir. Ksacas bu aamada, R matrisi, ayn zamanda da birim matris olan I
matrisi olmakta, bu durumda ( I ), matris arpmnda etkisiz olduundan son tabloda B
-1
R
matrisi ile
B
-1
matrisi ayn
matris olmaktadrlar.
Katk parametrelerinde deiiklik
Temelde yer alan
deikeninin katk parametresi olan c
2
= 3 deerinin hangi aral iin eldeki
eniyi zmn korunaca bulunmak istensin.
, c
2
deki
deiim miktar olmak zere, enbykleme
iin, eldeki zmn korunmas aadaki zelliin salanmas halinde mmkn olmaktadr.
Bu durumda yeni
vektr
olmak zere,
-
= ( 2S (S+
) - 2S, -1S (S +
) + 4S)
106
-2
iin eldeki zm korunur.
rnein c
2
deerinin 3den 2ye azalmas durumunda,
= -1 olup, yukarda bulunan aralk
ierisinde olduundan, bu deiikliin eniyilik koullarn deitirmemesi beklenir. Gerekten de bu
durumda,
-
= ( 4S - 2S, -2S + 4S )
= (2S, 2S)
olup, temel olmayan deikenlere ama fonksiyonu satrnda kar gelen deerler koulunu
salamaktadr. Beklendii gibi bu deiiklik eniyilik koullarn etkilememektedir.
Sa taraf sabitlerinde deiiklik
Problemin kstlarna kar gelen kaynak vektrndeki deiiklik, uygunluk koulu olan B
-1
b a
yansr. Yukardaki zmde,
=
eklindedir.
Burada birinci ksta kar gelen sa taraf sabiti deeri,
, ve
deki deiim miktar olmak
zere,
alndnda, uygunluk koulunun korunmas iin
olmaldr.
(6 +
0
4 + 2
2 +
+ 2
107
2
aral iin uygunluk koullar korunacaktr.
rnek olarak,
in mevcut durumda 6 olan deerinin, 18 olmas durumunda,
elde edilmektedir. Grld gibi
matrisinin ikinci eleman negatif deer almakta olup, yeni
durumda uygunluk koullar korunmamaktadr. Nitekim bu deiiklikle
in deerinde 12 birimlik bir
art olmutur. Yukarda bulunan ve ayn parametrenin deerindeki deiimin uygunluk koulunu
koruyacak aralna dikkat edililirse, deiikliin ancak 2 birime kadar azalma, 10 birime kadar da art
ynnde olmasna izin verilebilecei grlmektedir. Yukarda belirtilen, 12 birim art ynndeki
deiim bu sebeple, beklendii gibi uygunluk koullarn korumayacak ve temeldeki
deikeninin yeni
deeri bu artla, negatif olacaktr.
Teknik katsaylarda deiiklik
Yukardaki problemde, temelde yer alan
deikeninin ikinci ksttaki katsays olan 2 deerinin 4
olmas durumu analiz edilecek olursa, yeni durumda B vektr,
=
olmaktadr.
matrisi ise,
=
olarak bulunur. Eniyilik koullarnn korunup korunmadn belirleyebilmek iin aadaki ilem
gerekletirildiinde,
C
B
B
-1
R - C
R
=
-
= ( 1u7, 17)
108
elde edilir. Ama fonksiyonu enbykleme olduuna gre, yeni C
B
B
-1
R - C
R
vektr deerleri 0
olup, eniyilik koulunu korumaktadr.
Yeni kst eklentisi
Gerek problemler modellendikten ve zldkten sonra nceden ngrlemeyen, bulunulan
sistemin koullarnda sonradan ortaya kabilecek baz deiiklikler sebebiyle, gznnde
bulundurulmas ihtiyac beliren yeni bir kst olabilir. Daha ncede belirtildii gibi bu durumda, eldeki
zmn yeni kst da salayp salamad kontrol edilmelidir.
Ele alnan probleme
kst eklenmi olsun.
Mevcut durumda eniyi zm
olarak elde edilmitir. Yeni kst dikkate alndnda
(70/3) + (8/3)
78/3
olup kst salanmamaktadr.
Eldeki zm yeni kst salamadndan, bu kstn da probleme eklenerek yeni zmn
aratrlmas gerekmektedir.
Yeni deiken eklentisi
Baz durumlarda, deien koullar sebebiyle, probleme yeni bir deiken eklenebilir. rnein ayr
rn reten bir iletmenin yeni ve drdnc bir rn daha piyasaya sunmas durumunda, dier tm
kaynaklarn vb. ayn kalp, artk bu yeni rnnde mevcut kaynaklar kullanmas, bu durumda eniyi
retim miktarlarnn yeniden belirlenmesi gereklilii bu duruma rnek olarak verilebilir. Yeni bir karar
deikeni szkonusu olmaktadr.
Daha ncede belirtildii gibi bir deiken, bir zm srecinde temelde veya temelde dnda yer
almaktadr. Temel dnda olup da ama fonksiyonunu istenen ynde gelitirebilecek durumda ise, temele
alnr. Buna gre, eniyi zm elde edildikten sonra probleme dahil olan bir deikenin, temele
alnmasna gerek olup olmad sorusu yantlanmaldr. Bu soruya yant verebilmek iin de, ilgili
deikene ama fonksiyonu satrnda kar gelen deer hesaplanp, ama fonksiyonunun enbykleme
veya enkkleme olmasna gre yukardaki soruya yant aranr. Bu deerin hesaplanmas iin, yeni
deikene problemin kstlarnda kar gelen katsaylarn yani, yeni deikenin kaynak kullanm
deerlerinin, (
) ve ama fonksiyonundaki birim katksnn (
) bilinmesi gerekmektedir.
109
Problemimize, kaynak kullanm vektr
ve birim katks
= 4
olan yeni bir deiken eklenmi olsun. Yukardaki hatrlatmalar altnda,
=
olup
- 4
= (4S, 1S)
- 4
= 2 - 4
= -2
Buna gre, yeni deikenin ama fonksiyonu satrnda kar gelecek katsays negatif olacaktr. Ama
enbykleme olduuna gre yeni deikenin temel alnmas halinde mevcut durumda S2S olan deerin
artmas mmkndr. Yeni deiken temele alnarak ilemlere devam edilmelidir.
110
zet
Dorusal karar problemlerinin eniyi zmleri
elde edildikten sonra, model parametrelerinde
baz deiiklikler meydana gelebilir. Bazen de
yeni bir deiken veya yeni bir kst eklentisi
eklinde ortaya kabilen yapsal deiiklikler ile
karlalabilir. Bu durumlarda eniyi zmn
bundan nasl etkileneceini bulmak amacyla
yaplan analizlere duyarllk analizi denir.
Bir problemin eniyi zmne ulalmas, temele
alnmas halinde ama fonksiyonu deerini daha
iyiye gtrecek bir temel d deikenin
bulunamamas demektir. Bu durumun gstergesi;
ama enbykleme ise, ama fonksiyonunu
temsil eden
satrnda tm temel d dei-
kenler iin kar gelen deerlerin , ama
enkkleme ise de, olmasdr. Bu koula
eniyilik koulu denir. Ama fonksiyonu satr
bilindii gibi C
B
B
-1
R - C
R
ifadesine kar
gelmektedir. Model parametrelerinde olabilecek
deiikliklerden ilki katk parametrelerinde olup,
bu durumda deien C vektr olduundan,
yukardaki ifadeye yansr.
te yandan, Simpleks Algoritmas, bir u
noktadan (temel uygun zm) balayarak
baka bir u noktaya geme temelinde bir
yaklam olup bulunan zmlerde temel
deikenler koulunu salayan pozitif
deerler almaktadrlar. B
-1
b olarak ifade
edilen bu duruma da uygunluk koulu
denmektedir. Model parametrelerindeki dier tr
deiiklik olan kaynak vektr veya sa taraf
sabitlerindeki deiiklik ise b vektrnde
olduundan, bu durum da uygunluk koullarna
yansyacaktr.
Bu iki parametreye bal deiiklie ek olarak,
bir karar deikeninin model kstlarnda kar
gelen bir katsaysnda da deiiklik olabilir. Bu
da deikenin temel veya temelde olmamas
durumuna gre B veya R matrisine ve eniyilik
koullarna yansr.
Yapsal deiiklikler ise modele yeni bir
deikenin veya kstn eklenmesi durumudur.
Duyarllk analizi, basitce, modelde,
parametrelere bal veya yapsal bir deiiklik ile
karlaldnda, bu durumun eniyilik veya
uygunluk koullarndan herhangi birisine etki
edip etmediinin ve etki ediyorsa da deien
parametrenin deerinin hangi aral iin eldeki
zmn korunacann bulunmas ilemidir.
Bazen de, parametrenin yeni deeri bilindiinde,
eniyilik veya uygunluk koullarna yansyp
yansmad dorudan hesaplanabilir.
Yukarda bahsedilen karlalabilir durumlar
srasyla irdelenecek olursa; katk
parametrelerindeki deiiklik C vektrnde
deiiklik anlamna gelmektedir. Bu durumda
ilemler, deiikliin, temel veya temel olmayan
bir deikenin katk parametresinde ortaya
kmasna gre farkllk gsterir. Eer C
B
vektrdeitiyse Simpleks Tabloda
satrnda temel d tm deikenlere kar gelen
deikenler (C
B
B
-1
R - C
R
) bu durumdan etkilenir
ve ilemler bu dorultuda gerekletirilir.
Katk parametrelerinden C
R
vektrnn
deimesi halinde ise Simpleks Tabloda x
o
satrnda sadece C
R
vektrnde katk parametresi
deien temel d deikene kar gelen deer bu
durumdan etkilenir.
Katk parametrelerine gre deiiklik de yine
yukarda akland gibi iki trl olabilir:
Parametrenin deerinde belirli bir deiiklik olur
ve bu deiikliin eniyi zm deitirip
deitirmedii aratrlr veya parametrenin
deerinde hangi aralktaki bir deiim iin eldeki
zmn korunaca (veya deiecei) belirlenir.
Bu durumda da, deiim miktar olmak zere,
eniyilik koullarnn korunmas iin, nn hangi
aralkta deer almas gerektii aratrlr.
Kaynak vektr olan sa taraf sabitlerinde
meydana gelebilecek bir deiiklik, daha ncede
belirtildii gibi uygunluk koullarna
yansyacandan, benzer ekilde, b vektrndeki
deiim biliniyorsa (
dorudan yeni haliyle
B
-1
koulunun salanp salanmad
aratrlabilir. lgilenilen kaynak vektrnn
hangi aral iin uygunluk koulunun korunaca
aratrlacaksa bu durumda da, deiim miktar
olmak zere, nn hangi aralkta deer almas
gerektii aratrlr.
Parametrelere bal son deiiklik teknik
katsaylarda olabilir. Teknik katsaylar,
deikenlerin kstlardaki katsaylarna karlk
gelen deerlerdir. Bir deikene kstlarda kar
gelen katsaynn deimesi, ilgili deikenin
temelde olup olmamasna gre, srasyla B veya
R vektrnde deiim demektir. Bu durum ise,
ya B
-1
matrisine ya da dorudan R vektrne
etki edip, C
B
B
-1
R - C
R
vektrne ve eniyilik
koullarna yansyacaktr. Ama fonksiyonunun
111
durumuna gre, deiimin, eniyilik koullarn
koruyup korumad veya deiimin hangi aral
iin eniyi zmn korunaca yine yukarda
rneklendii ekilde bulunabilir.
kinci grup duyarllk analizleri saylabilecek,
yapsal deiiklikler olarak ise; yeni bir kst veya
yeni bir deiken eklentisi szkonusudur. Yeni
bir kst eklendiinde, eldeki zmn, verilen
kst salayp salamadnn snanmas
gerekmektedir. Salamyorsa, problem, yeni
kst ekleyerek zlmelidir.
Yeni bir deiken eklendii durumda ise u yol
izlenmelidir: Bir deiken, bir temel uygun
zmde, ya temelde ya da temel dnda yer alr.
Bunu belirleyen gsterge ise, szkonusu
deikenin, ama fonksiyonu satrndaki
deerinin eniyilik koullarna uygun olmas veya
olmamasdr. Enbykleme iin, C
B
B
-1
R - C
R
vektrnde, deerindeki temel d
deikenler eniyilik koullarna uygun olup,
temele alnmalar halinde ama fonksiyonunun
deerinin daha da bymesi szkonusu deildir.
Durulur. Enkkleme iin ise koulunu
salayan temel d deikenler eniyilik
koullarna uygun olup, temele alnmalar halinde
ama fonksiyonunun deerinin daha da
klmesi szkonusu deildir. Durulur. Yeni
deikenin eldeki zm daha iyi bir deere
telemesi mmkn deil demektir.
Bu durumda, yeni bir deiken eklendiinde, bu
deikenin Simpleks Tabloda ama fonksiyonu
satrna kar gelen deerinin bulunmas gerekir.
Deikenin durumuna gre ya temele alnmas
gerektii sonucuna varlr ya da daha iyi bir ama
fonksiyonu deerine ulalamayacaksa bu
deiken temel dnda kalmaya devam eder. Bu
durum eldeki zmn eniyi zm olarak
kalmas halidir.
Gerek hayatta ou durumda belirsizlik veya
risk altnda yaanr. Bu sebeple duyarllk
analizleri, zm elde edilen belirli
problemlerde, bu blmde deinilen herhangi bir
deiikliin olmas halinde, problemi yeniden
zmeden eldeki zmn korunup
korunmayacana yant vermeleri asndan
nemli analizlerdir. Baz durumlarda da model
parametrelerinde, ihtiya halinde yaplmas
dnlen bir deiikliin, hangi snrlara kadar
deitirilmesi halinde yeni bir zme gerek
kalmayacann nceden bilinmesine olanak
salar. rnein toplam maliyeti enkklemek
isteyen bir tama irketinin, mevcut tama filosu
ve eldeki olanaklarla, nceden belirledii alt
snrdan daha fazla tama yapmay hedeflemesi
halinde, yeni hedef deerini belirlediinde,
(kaynak vektr bde deime), eldeki mevcut
zmnn hala uygulanabilir bir zm olup
olmayacan (B
-1
b ) ve bu durumdan toplam
maliyetinin hangi lde etkileneceini
(C
B
B
-1
bnceden snayabilmesi mmkndr.
112
Kendimizi Snayalm
Aada bir enbykleme problemi iin
gelitirilen matematiksel model ve kar gelen
eniyi zm tablosu verilmektedir.
x
0
x
1
x
2
x
3
s
1
s
2
STS
x
0
1 3 0 0 4 1 300
x
3
0 1/2 0 1 3/2 -1/2 25
x
2
0 1/2 1 0 -1/2 1/2 25
1-10. sorular yukardaki problem iin
yantlaynz.
1. x
2
nin ama fonksiyonundaki katksnn 9
olmas durumunda x
1
deikenine ama
fonksiyonu satrnda kar gelen deer ka olur?
a. 2
b. 3
c. 1
d. 4
e. 7
2. x
2
nin ama fonksiyonundaki katksnn 9
olmas durumunda s
1
deikenine ama
fonksiyonu satrnda kar gelen deer ka olur?
a. 2
b. 3
c. 1
d. 4
e. 7
3. x
2
nin ama fonksiyonundaki katksnda
olabilecek kadar deiimin hangi aral iin
eldeki zm korunur?
a.
b. 2
c.
d.
e. 6
4. x
1
in ama fonksiyonundaki katksnn 4
olmas durumunda bu deikene ama
fonksiyonu satrnda kar gelen deer ka olur?
a. 1
b. 2
c. 3
d. 2
e. 5
5. x
1
nin ama fonksiyonundaki katksnda
olabilecek kadar deiimin hangi aral iin
eldeki zm korunur?
a.
b. 5
c.
d. 1
e.
6. Birinci kstn sa taraf sabiti olan 50
deerinin 55 olmas durumunda yeni B
-1
b vektr
aadakilerden hangisi olur?
a.
b.
c.
d.
e.
7. Modele
kstnn eklenmesi
durumu iin aadakilerden hangisi geerlidir?
a. Eldeki zm yeni kst salar, izleyen
zme geilir.
b. Eldeki zm yeni kst salamaz, problem
yeniden zlmelidir.
c. Eldeki zm yeni kst salar, baka bir
ileme gerek yoktur.
d. Eldeki zm yeni kst salamaz, izleyen
zme geilmelidir.
e. Eldeki zm yeni kst salar, yine de
izleyen zm bulunmaldr.
113
8. Modele, kstlara kar gelen katsaylar
vektr
ve ama fonksiyonundaki katks
= 3
olan yeni bir deikenin eklenmesi durumu iin
hangisi dorudur?
a. Yeni deikene ama fonksiyonu satrnda
kar gelen deer negatif olup eniyilik
koullar korunmamaktadr, yeni deiken
temele alnmaldr.
b. Yeni deikene ama fonksiyonu satrnda
kar gelen deer pozitif olup eniyilik
koullar korunmaktadr, yeni deiken temele
alnmamaldr.
c. Yeni deikene ama fonksiyonu satrnda
kar gelen deer pozitif olup eniyilik
koullar korunmamaktadr, yeni deiken
temele alnmaldr.
d. Yeni deikene ama fonksiyonu satrnda
kar gelen deer negatif olup eniyilik
koullar korunmaktadr, yeni deiken temele
alnmaldr.
e. Yeni deiken iin uygunluk koullar
korunmamaktadr.
9. Temel dnda yer alan
deikeninin ikinci
ksttaki katsays olan 2 deerinin 3 olmas
durumunda,
deikenine ama fonksiyonu
satrnda kar gelen yeni deer ka olur?
a. 10
b. - 11
c. 3
d. 4
e. - 6
10. Temelde yer alan
deikeninin ikinci
ksttaki katsays olan 1 deerinin 2 olmas
durumunda,
deikenine ama fonksiyonu
satrnda kar gelen deer ka olur?
a. 1
b. 2
c. - 3
d. 3
e. - 4
114
Kendimizi Snayalm Yant
Anahtar
1. d Yantnz yanl ise Katk Parametresindeki
Deiime Gre Duyarllk Analizi balkl
konuyu yeniden gzden geiriniz.
2. b Yantnz yanl ise Katk Parametresindeki
Deiime Gre Duyarllk Analizi balkl
konuyu yeniden gzden geiriniz.
3. d Yantnz yanl ise Katk Parametresindeki
Deiime Gre Duyarllk Analizi balkl
konuyu yeniden gzden geiriniz.
4. d Yantnz yanl ise Katk Parametresindeki
Deiime Gre Duyarllk Analizi balkl
konuyu yeniden gzden geiriniz.
5. c Yantnz yanl ise Katk Parametresindeki
Deiime Gre Duyarllk Analizi balkl
konuyu yeniden gzden geiriniz.
6. c Yantnz yanl ise Sa Taraf Sabitindeki
Deiime Gre Duyarllk Analizi balkl
konuyu yeniden gzden geiriniz.
7. c Yantnz yanl ise Yeni Kst Eklentisi
balkl konuyu yeniden gzden geiriniz.
8. b Yantnz yanl ise Yeni Deiken
Eklentisi balkl konuyu yeniden gzden
geiriniz.
9. d Yantnz yanl ise Teknik Katsaylardaki
Deiime Gre Duyarllk Analizi balkl
konuyu yeniden gzden geiriniz.
10. a Yantnz yanl ise Teknik Katsaylardaki
Deiime Gre Duyarllk Analizi balkl
konuyu yeniden gzden geiriniz.
Sra Sizde Yant Anahtar
Sra Sizde 1
deikeninin katk parametresi olan c
2
= 3
deerinin
=1 olmas halinde,
olup yeni haliyle
B
-1
R - C
R
vektr u
ekilde hesaplanr:
B
-1
R =
-
= (-2, 3)
olup ama fonksiyonunun enbykleme olduu
hatrlanrsa, yeni durumda temel olmayan
deikenler iin
satr deerleri artk eniyilik
koullarn salamamaktadr. s
1
deikenine
kar gelen deer, (-2) , negatif olup, bu
deikenin temele alnmas halinde ama
fonksiyonunun mevcut durumda 140 olan deeri
daha da byyebilecek demektir. Bu durumda
ilemler s
1
deikeni temele alnarak bilinen
Simpleks Algoritmas admlar ile devam eder.
Sra Sizde 2
temel d deikendir.
olmaktadr. S. 98de belirtildii gibi; katks
deien deiken eer temel d ise, bu durumda
ama fonksiyonu satrnda sadece o deikene
kar gelen deer iin ilemlerin yaplmas yeterli
olacaktr. Bu da R matrisi ve C vektrnde
sadece szkonusu deikenle ilgili vektrn
gznnde bulundurulmas ve ilemin
-
= 2
eklinde yaplmasn gerektirir.
115
temel d deikeninin, yeni durumda, ama
fonksiyonu satrna kar gelen deeri olup
ama fonksiyonu enkkleme olduuna gre
eniyilik koullar korunmamaktadr.
deikeninin temele alnmas gerekmektedir.
Sra Sizde 3
B
-1
b olmaldr.
Mevcut durumda kaynak vektr,
=
eklindedir.
Burada birinci ksta kar gelen sa taraf sabiti
in deerinin 258e kmas durumu
sorgulanmaktadr.
=
olup,
B
-1
olduundan uygunluk koullar korunmaktadr.
Yararlanlan Kaynaklar
Taha, H, (2003), Yneylem Aratrmas, 3.
Basm, (Baray . A., Esnaf . tarafndan eviri),
Literatr Yaynclk, stanbul.
Winston W. L., 4
th
Edition, Operations
Research: Applications and Algorithms.
Kara, ., (2000), Dorusal Programlama, Bilim
Teknik Yaynevi, stanbul.
116
Amalarmz
Bu niteyi tamamladktan sonra;
Verilen bir dorusal karar modelinin ikilini yazabilecek,
kil deikenlerin ekonomik anlamn aklayabilecek,
Asl ve ikil modeller arasndaki ilikileri ifade edebilecek,
kil deikenleri bulabilecek,
Kaynaklarn glge fiyatlarn yorumlayabilecek
bilgi ve becerilere sahip olabilirsiniz.
Anahtar Kavramlar
killik
kil Model
Asl Model
kil Deiken
Kanonik Biim
Boluk Deikeni
Aylak Deiken
Artk Deiken
Sk Kst
Glge Fiyat
indekiler
Giri
Dorusal Karar Modelinin kili
kil Deikenlerin Ekonomik Anlam
Asl ve kil Modellerin zmleri Arasndaki likiler
kil Problemin zmnn Asl Simpleks Tablosundan Elde Edilmesi
kil Problemi Kullanarak Asl Problemin zlmesi
Glge Fiyatlar
6
117
GR
killik ya da Latince kkenli adyla dualite kelimesi, farkl alanlarda deiik anlamlara sahip olsa da,
genel olarak kartlk ve birbirini tamamlayclk zelliklerine iaret etmektedir. Sembolik olarak ekil
6.1de grld gibi siyah-beyaz bir daireyle gsterilen, Uzakdou ve zellikle bir in felsefesi olarak
tannan Yin ve Yang, ikillik ilkesini ok iyi anlatr. Bu dnceye gre, her eyin birbirinden ayrlamaz
iki kart kutbu vardr. Kutuplar az da olsa kartn mutlaka ierisinde barndrr ve kartlar birbirine
dnebilen yapdadr.
Trk Dil Kurumu tarafndan yaynlanan byk Trke szlkte dualite ilkesi teriminin anlam, iki
temel kavramn yer ald bir nermede bu iki kavramn yerleri deitirildiinde doru olan yeni bir
nermenin elde edilmesi olarak tanmlanmaktadr.
killik konusunun dorusal programlama ile ilgisi, eniyi zm aranan her dorusal karar probleminin
gerekte asl ve ikil olarak adlandrlan, birbiriyle yakndan ilikili iki ayr modeli iermesinden ileri
gelir. Bu modeller, ikilliin felsefi anlamna da ters dmeyecek ekilde, birbirinin hem kart saylabilen
hem de birbirine dnebilen yapda olan modellerdir. Bir dorusal programlama probleminin asl ve ikil
modellerinin zmleri arasndaki ilikilerin bilinmesi nemlidir. Asl problem veya asl model, eniyi
zm aranan problemdir. Dorusal programlama problemleri ile ilgili zm teknikleri, asl modellerin
zm zerine younlamtr. kil model ise, asl modelin parametreleri kullanlarak oluturulan ve
kart ynde ama fonksiyonuna sahip olan dier modeldir.
ekil 6.1: Evrensel ikillii simgeleyen Yin ve Yang sembol
Dorusal programlamada ikilliin nemli olmasnn balca ana nedeni bulunmaktadr:
1. kil modelin deikenlerinden hareketle, asl problemle ilgili nemli ekonomik aklamalarda
bulunma ve yorum yapma imkan salar.
2. Modelin yapsndaki veya parametrelerindeki deiimleri inceleyen duyarllk analizleri ile ilgili
ilemlere katkda bulunur.
3. Baz durumlarda ikillik, ilgilenilen asl problemin zmn kolaylatrr.
killik (Dualite)
118
DORUSAL KARAR MODELNN KL
Verilen bir dorusal karar modelinin ikil modelini yazma ilemi ikilini alma olarak ifade edilir. kil
modelin karar deikenleri ise ikil deikenler olarak adlandrlr. kinci niteden hatrlanaca gibi,
verilen bir dorusal programlama modeli standart veya kanonik biime dntrlebilmektedir. Kanonik
biimde yazlm bir dorusal karar modelinin ikilini almak daha kolaydr. Bu blmde ncelikle kanonik
modelin ikilinin yazlmas zerinde durulmakta, daha sonra kanonik olmayan bir modelin ikilinin nasl
alnaca aklanmaktadr.
Kanonik Modelin kili
Kanonik biimde, eer problemin amac enbykleme ise tm kstlar tipinde, eer enkkleme ise
tm kstlar eklinde olur. Ayrca, karar deikenlerinin tmnn sfrdan byk eit olma (veya
negatif deer almama) koulunu tamas gerekir.
Bir dorusal karar modeli uygun ilemlerden sonra,
a
11
x
1
+ a
12
x
2
+ . . . + a
1n
x
n
b
1
a
21
x
1
+ a
22
x
2
+ . . . + a
2n
x
n
b
2
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
x
1
+ a
m2
x
1
+ . . . + a
mn
x
n
b
m
x
j
0 (j=1,2,...,n)
kstlar altnda
Enb z = c
1
x
1
+ c
2
x
2
+ . . . + c
n
x
n
eklinde tanmlanmsa, bu yapnn ikili
a
11
y
1
+ a
21
y
2
+ . . . + a
m1
y
m
c
1
a
12
y
1
+ a
22
y
2
+ . . . + a
m2
y
m
c
2
.
.
.
.
.
.
.
.
.
.
.
.
a
1n
y
1
+ a
2n
y
2
+ . . . + a
mn
y
m
c
n
y
i
0 (i=1,2,...,m)
kstlar altnda
Enk v = b
1
y
1
+ b
2
y
2
+ . . . + b
m
y
m
olarak ifade edilir. kil modelde y
1
, y
2
,, y
m
ile gsterilen deikenler ikil deikenlerdir.
Kanonik biimde, enbykleme problemleri iin tm kstlar ,
enkkleme problemleri iin ise biiminde olur.
Yukardaki modellere dikkat edilirse, her iki modelin de farkl yerlerde ayn parametreleri kulland
grlr. Kanonik biimli ve enbykleme amal bir problemin ikilini yazarken ortaya kan durumlar
aadaki ekilde zetlenebilir:
1. Asl modelde ama fonksiyonunun enbyk deeri aranyor iken, ikil modelde bunun kart
olan enkk deer aratrlmaktadr.
2. Asl modelde tm kstlarn yn iken, ikil modelde tm kstlarn yn bunun kart olan
eklindedir.
119
3. Asl modelde m adet kst varken, ikil modelde m adet karar deikeni (y
1
,y
2
,,y
m
)
bulunmaktadr. Bir baka deyile asln her kst iin bir ikil deiken tanmlanmaktadr.
4. Asl modelde n adet karar deikeni bulunurken, ikilinde n adet kst yer almaktadr. Bir dier
deyile asln her deikeni ikilin bir kstna kar gelmektedir.
5. Asl model kstlarnn sa taraf sabitleri (b
i
), ikilin ama fonksiyonu katsaylardr.
6. Asl modelin ama fonksiyonu katsaylar (c
j
), ikil model kstlarnn sa taraf sabitleridir.
7. Asl modelde i. kstn sol tarafndaki satr katsaylar (a
i1,
a
i2,
,
a
in,
), ikil modelin y
i
deikenine
ait stun katsaylar olmaktadr.
8. Hem asl hem de ikil modelin deikenleri sfrdan byk eit olarak tanmlanmtr.
Eer asl model kanonik biimli ve enkkleme amal ise, bunun ikil modeli, yukarda sralanan
durumlarn ilk ikisi dnda kalan zelliklerin tamamn salamak zorundadr. Farkl olarak ikil modelin
ama fonksiyonu enbykleme ynnde ve tm kstlar biiminde olmaldr.
Enkkleme amal bir dorusal karar modeli,
a
11
x
1
+ a
12
x
2
+ . . . + a
1n
x
n
b
1
a
21
x
1
+ a
22
x
2
+ . . . + a
2n
x
n
b
2
.
.
.
.
.
.
.
.
.
.
.
.
a
m1
x
1
+ a
m2
x
1
+ . . . + a
mn
x
n
b
m
x
j
0 (j=1,2,...,n)
kstlar altnda
Enk z = c
1
x
1
+ c
2
x
2
+ . . . + c
n
x
n
biiminde gsterilmise, ikil modeli
a
11
y
1
+ a
21
y
2
+ . . . + a
m1
y
m
c
1
a
12
y
1
+ a
22
y
2
+ . . . + a
m2
y
m
c
2
.
.
.
.
.
.
.
.
.
.
.
.
a
1n
y
1
+ a
2n
y
2
+ . . . + a
mn
y
m
c
n
y
i
0 (i=1,2,...,m)
kstlar altnda
Enb v = b
1
y
1
+ b
2
y
2
+ . . . + b
m
y
m
eklinde tanmlanr.
Kanonik biimdeki dorusal karar modelinin ikilini kolaylkla oluturabilmek iin Tablo 6.1 ve Tablo
6.2den yararlanlabilir. Tablo 6.1, asl modelin parametreleri ile soldan saa doru doldurulur. Asl kst
tipine ve amacna gre, ikil modelin kstlarnn ve amacnn yn, Tablo 6.2den yararlanarak yazlr.
Tablo yukardan aaya okunduunda ikili bulunmu olur. Tablo kullanlarak ikil modelin oluturulmas,
biri enbykleme dieri enkkleme amal olarak hazrlanm iki rnek zerinde gsterilmektedir.
120
Tablo 6.1: Tablo yardmyla kanonik biimdeki asl modelin ikilinin oluturulmas
Asl
deikenler
kil
deikenler
x
1
0
x
2
0
. . .
x
n
0
Asl kst
tipi
kil
ama
y
1
0 a
11
a
12
. . . a
1n
b
1
y
2
0 a
21
a
22
. . . a
2n
b
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
y
m
0 a
m1
a
m2
. . . a
mn
b
m
kil kst tipi
Asl ama c
1
c
2
. . . c
n
Tablo 6.2: Kanonik biimdeki asl ve ikil modeller arasndaki ilikiler
ASIL PROBLEM KL PROBLEM
Ama Kst tipi Deikenin
iareti
Ama Kst tipi Deikenin
iareti
Enbykleme 0 Enkkleme 0
Enkkleme 0 Enbykleme 0
rnek 6.1.
Enbykleme amal ve kanonik biimli bir dorusal programlama modelinin tm kstlar tipinde
ve btn karar deikenleri 0 olarak ifade edilir. Aada grlen kanonik biimde yazlm
dorusal programlama modelinin ikilini bulalm.
X
1
+ 2x
2
5
X
1
- 5x
2
-3
4x
1
+ 7x
2
8
x
1
, x
2
0
k.a.
Enbz = 5x
1
+ 6x
2
Yukardaki gsterimde k.a. kstlar altnda anlamna gelmektedir.
Tablo 6.2den ikil modelin amacnn enkkleme ve kstlarn ynnde olaca grlmektedir.
kil modeli yazabilmek iin ncelikle, asl modelin parametrelerinin yer ald Tablo 6.3 oluturulur.
Daha sonra ayn tablo zerine ikil modelin kst iaretleri ve ama yn yazlarak, verilen problemin ikil
modeli aadaki ekilde elde edilir:
121
3 2 1
3 2 1
3 2 1
3 2 1
y y y
0 y y y
6 7y 5y 2y
5 4y y y
8 3 5
. .
, ,
+ =
+
+ +
Enkv
a k
Tablo 6.3: rnek 1deki modelin ikilinin oluturulmas
Asl
deikenler
kil
deikenler
x
1
0
x
2
0
Asl kst
tipi
Enkv
y
1
0 1 2 5
y
2
0 1 -5 -3
y
3
0 4 7 8
kil kst tipi
Enbz 5 6
rnek 6.2.
Enkkleme amal ve kanonik biimli bir dorusal programlama modelinin tm kstlar tipinde ve
btn karar deikenleri 0 olarak ifade edilir. Aadaki verilen enkkleme amal ve kanonik
biimli yazlm dorusal programlama modelinin ikilini bulalm.
3 2 1
3 2 1
3 2 1
3 2 1
2 3 6
. .
0 , ,
6 2 4 2
2 3 6
x x x Enkz
a k
x x x
x x x
x x x
+ + =
+ +
+
kil modelin amac, asl modeldekinin kart olarak enbykleme ynnde ve kstlar tipinde
olacaktr. lk rnektekine benzer ekilde Tablo 6.4 oluturabilir ve ikil modeli aadaki ekilde
yazabiliriz:
2 1
2 1
2 1
2 1
2 1
6 2
. .
0 ,
2 2
3 4 3
6 2 6
y y Enbv
a k
y y
y y
y y
y y
+ =
+
+
+
122
Tablo 6.4: rnek 2deki modelin ikilinin oluturulmas
Asl
deikenler
kil
deikenler
x
1
0
x
2
0
x
2
0
Asl kst
tipi
Enbv
y
1
0 6 -3 1 2
y
2
0 2 4 2 6
kil kst tipi
Enkz 6 3 2
Genel Modelin kili
En iyi deerini aradmz dorusal karar modeli, her zaman kanonik biimde olmayabilir. Modelin
kstlar, kullanlan kaynak miktarlarna gre , veya = tipinde verilebilir. Karar
deikenlerinin bazlarnn sfrdan kk eit olmas istenirken, bazlarnn serbest iaretli olmas (, 0, +
iaretli deer alabilen) istenebilir. Kanonik biimde olmayan bir dorusal karar modelinin, izleyen iki
yoldan birini kullanarak ikilini oluturmak mmkndr:
1. Uygun ilemlerle karar modelini kanonik biime dntrmek ve ikil modelini yazmak.
2. Dntrme ilemini yapmadan, genel kurallar uygulayarak dorudan ikil modeli yazmak.
Genel bir dorusal karar modelinin ikilinin yazlmasnda gznne alnacak ilikiler Tablo 6.5te
gsterilmektedir. Tabloda hangi problemin asl, hangisinin ikil olduu zellikle belirtilmemitir. Verilen
problemin amacna gre herhangi bir stun asl model olarak ele alnp, dier stunda kar gelen
koullardan hareketle ikil modeli kolaylkla oluturmak mmkndr. Tablodaki bantlar dikkatle
incelersek aadaki genel sonulara ulaabiliriz:
Asl ve ikil modellerin amalar kart yndedir. Bir model enbykleme amal ise dieri
enkkleme amaldr.
Bir modeldeki i. kst, dier modeldeki i. karar deikenine kar gelir.
Bir modeldeki i. kstn yn, dier modelde bu ksta kar gelen i. karar deikeninin iaretini
belirler.
Eer bir modelde i. kst eitlik olarak ifade edilmise, dier modelin i. karar deikeni serbest
iaretli olur.
Bir modeldeki kstn yn eer kanonik biimde ngrlenin tersi ynndeyse, dier modelde
buna kar gelen karar deikeni 0 olarak tanmlanr.
Tablo 6.5: Genel dorusal karar modelinin ikilinin alnmas
ENKKLEME PROBLEM
ENBYKLEME PROBLEM
Deikenler
0
0
serbest
=
Kstlar
Kstlar
=
0
0
serbest
Deikenler
123
rnek 6.3.
Aadaki verilen dorusal programlama modelinin ikilini yazalm.
2 1
2 1
2 1
2 1
2 1
6 5
0
8 7 4
3 5
5 2
x x Enbz
k.a.
x serbest, x
x x
x -x
x x
+ =
+
+
= +
Grld gibi asl modelimiz enbykleme amacna sahiptir ve kanonik biimde yazlmamtr.
Birinci yol, nce bu modeli uygun ilemlerle kanonik biime dntrmek, daha sonra ikilini
oluturmaktr. Kanonik biimdeki modellerin ikilini almakla ilgili rnekler yaptmzdan, imdi ikinci
yolu izleyerek, yani dorudan Tablo 6.5teki genel kurallar uygulayarak adm adm ikil modeli
oluturmaya alalm.
1. Asl modelin amac enbykleme olduundan, ikilin amac bunun tersi yani enkkleme olur.
2. Asl modelde 3 kst olup, bu kstlarn her birine ikil modelde bir deiken kar gelir (y
1
, y
2
, y
3
)
3. Asl modelin birinci kst = eklinde olduundan, y
1
serbest iaretli olur.
4. Asl modelin ikinci kst ynnde olup, kanonik biimde ngrlenin tersi ynndedir
(Enbykleme amal kanonik biimde, tm kstlarn ynnn ynnde olduunu
hatrlayalm). Bu durumda y
2
ikil deikeni de kanonik biimde ngrlenin ters iaretlisi
olarak, y
2
0 olarak tanmlanr (Kanonik biimde, deikenlerin iaretinin 0 olduunu
hatrlayalm).
5. Asl modelin nc kst ynnde olup, kanonik biimde ngrlenle ayn yndedir. Bu
durumda y
3
0 olarak tanmlanr.
6. Asl modeldeki her deikene karlk, ikil modelde bir kst kar gelir. Buna gre ikil model iki
ksta sahip olacaktr.
7. Asl modeldeki x
1
serbest iaretli olduundan, ikilin birinci kst = eklinde ifade edilir.
8. Asl modeldeki x
2
0 olduundan, ikilin ikinci kst kanonik biimde gsterildii gibi
ynnde olacaktr (ikil modelin amac enkklemek olduundan, kanonik biimde kstlarn
ynnde olmas gerekir)
Yukardaki aklamalara gre oluturulan Tablo 6.6y kullanarak, ikil model aadaki ekilde elde
edilir.
3 2 1
3 2 1
3 2 1
3 2 1
8 3 5
0 , 0
6 7 5 2
5 4
y y y Enkv
k.a.
y y serbest, y
y y y
y y y
+ + =
+ +
= +
124
Tablo 6.6: rnek 3teki modelin ikilinin alnmas
Asl
deikenler
kil
deikenler
x
1
serbest
x
2
0
Asl kst
tipi
Enkv
y
1
serbest 1 2 = 5
y
2
0 -1 5 3
y
3
0 4 7 8
kil kst tipi =
Enbz 5 6
killiin nemli zelliklerinden birisi Bir dorusal programlama
probleminin ikil modelinin ikili, asl modele kar gelir. olarak tanmlanmaktadr.
Aadaki dorusal karar modelinin nce ikilini alnz. Daha sonra, ikil modelin tekrar
ikilini alarak, asl modeli elde ediniz.
2 1
2 1
2 1
2 1
8 6
. .
0 ,
7 2 5
4 3
x x Enkz
a k
x x
x x
x x
+ =
+
+
KL DEKENLERN EKONOMK ANLAMI
Giri ksmnda, ikil deikenlerden yararlanarak, asl problemle ilgili nemli ekonomik yorumlar
yaplabilecei ifade edilmiti. Verilen bir dorusal programlama modelinin ikilinin nasl elde edilecei
rneklerle aklanarak gsterildi. Artk oluturulan ikil modelden yararlanarak, asl problemin ekonomik
adan nasl yorumlanabilecei konusunu ele alabiliriz. Konunun daha iyi anlalmas iin, izleyen rnek
problem zerinden gidilecektir. Dorusal programlama modelleri, genellikle snrl kaynak kullanm
kstlar altnda gelir ya da karn enbyklenmesi amacna ynelik olarak gelitirilen, bir kaynak datm
modeli gibi dnlebilir. rnek problemde de, kar enbykleyen retim miktarlarnn bulunmas
istenmektedir.
rnek 6.4 (Bahar Mobilya)
Bahar mobilya irketi, izleyen ay iin alm olduu zel bir sipari gerei, dier rnlerinin yannda A
ve B olarak tanmlad ahap el yapm iki yeni rn daha imal etmek istemektedir. rnler, montaj ve
cilalama olmak zere iki ana sreten geerek imal edilecek, daha sonra stoklanmas iin depoya
gnderilecektir. Mevcut igc olanaklar dikkate alnarak, iki rn iin montaj ilerine en fazla 82 saat,
cilalama ilerine ise en fazla 112 saat ayrlabilecei belirlenmitir. Depoda bu rnlerin stoklanmas iin
ayrlacak yer ise toplamda en fazla 10 rne yetecek kadardr. A rnnn bir birim imalat iin 4 saat
montaj ve 14 saat cila iilii, B rn iin birim bana 10 saat montaj ve 8 saat cila iilii
gerekmektedir. rnlerin bitmi haldeki boyutlar birbirine yakn olup, depoda birim bana 1 m
2
stok
alan ayrlmas yeterlidir. Sattan elde edilecek birim karlar ise, A iin 40, B iin 70 olarak
belirlenmitir.
Yukardaki bilgilere gre asl problemimiz, irketin karn enbykleyecek retim miktarlarnn
bulunmasdr. X
A
ve X
B
, A ve B rnlerinden imal edilecek miktarlar gsteren karar deikenleri olmak
zere, asl karar modeli
125
) ( 70 40
. .
0 ,
10
112 8 14
82 10 4
mesi enbyklen karn
kstlar) (iaret
kst) yer (depo
kst) saati (cilalama
kst) ati (montaj sa
B A
B A
B A
B A
B A
x x Enbz
a k
x x
x x
x x
x x
+ =
+
+
+
eklinde ifade edilir.
Asl problemde, farkl kayna kullanarak (montaj saati, cilalama saati, depo yeri), iki eit rn
(A ve B) imal etmek isteyen bir mobilya irketi bulunmaktadr. Firmann elindeki mevcut kaynaklar snrl
olup bunlarn enbyk kullanm miktarlar (kapasiteleri) ve her rnn satndan elde edilecek birim
karlar bilinmektedir. zetle asl problem, kaynak kstlar altnda, enbyk kazanl rn imal etme ya
da satma problemidir.
imdi ikil problemin dorusal karar modelini oluturalm. kil problem, asl problemin kart olarak,
kr kstlar altnda, enkk maliyetli kaynak satn alma problemi olarak ortaya kar. kil problemi
aklayabilmek iin, mobilya sektrnde yer alan bir baka giriimcinin kendi sahip olduu kaynaklarn
yetersiz kalmas yznden, Bahar Mobilyann A ve B rnlerini imal etmekte kullanaca tm
kaynaklar bir aylna satn almak ya da kiralamak istediini varsayalm. Giriimci, cilalama, montaj ve
depo yeri olarak tanmlanan kaynaklarn birim bana satn alma fiyat iin, mobilya irketi ile pazarlk
yaparak satn alma maliyetini enkklemek isteyecektir. Mobilya irketinin kar karya kald
problem bir kr enbykleme problemi iken, giriimcinin zmek zorunda olduu problem bir maliyet
enkkleme problemi olarak ortaya kmaktadr. Tablo 6.7de ikil problemle ilgili veriler yer
almaktadr.
Tablo 6.7: Giriimci firmann problemine ilikin veriler
Kaynak
1 birim rn iin gerekli
kaynak miktar
Kaynaklarn
eldeki miktarlar
A B
Montaj (saat)
Cilalama (saat)
Depo yer alan (m
2
)
Birim kr ()
4
14
1
40
10
8
1
70
82
112
10
Yukardaki aklamalara gre, ikil problemde cevabn aradmz soruyu,
1. Montaj iiliinin 1 saati iin denecek fiyatn ne olaca,
2. Cilalama iiliinin 1 saati iin denecek fiyatn ne olaca,
3. Depoda 1 metrekarelik yer iin denecek fiyatn ne olaca,
eklinde tanmlayabiliriz.
Kaynaklarn birim fiyatlar srasyla y
1
, y
2
, y
3
olsun. Bahar Mobilyann elinde bulunan kaynaklarn
miktarlar, 82 saat montaj iilii, 112 saat cilalama iilii ve 10 m
2
depo alandr. Giriimci, mobilya
firmasnn A ve B rnleri iin kullanaca tm kaynaklar satn almak istediine gre, bu kaynaklarn
hepsine demesi gereken fiyat v ile gsterirsek,
3 2 1
10y 112y 82y + + = v
126
eklinde tanmlanr. Giriimci asndan kaynaklarn bir aylk kiralama ya da satn alma bedeli
enkklenmek istendiinden, kurmak istediimiz modelin ama fonksiyonu
3 2 1
10y 112y 82y Enkv + + =
olarak ifade edilecektir. kil dorusal programlama modelinin zm ile, akll bir giriimci iin satn
alma fiyatlar kabul edilebilir olan en az maliyetli plana ulalacaktr.
Kaynak birim fiyatlarn belirlerken, gz nne almamz gereken kstlar, rnlerin satndan elde
edilecek kazanlarla ilgilidir. Bahar Mobilyann kaynaklarn satmaya ya da kiralamaya istekli olmas
iin, kira bedelinin en az, mobilya irketinin A ve B rnlerini imal ettiinde elde edecei kazan kadar
olmas gerekir. Yani, kaynak birim fiyatlar yle belirlenmelidir ki, Bahar Mobilya sahip olduu
kaynaklar kullanarak rn imal etmek yerine, giriimci firmaya satmaya ikna olsun. Bir dier deyile,
kaynak cretleri, mobilyacy sata tevik edecek kadar yksek, fakat giriimciyi satn almaktan
vazgeirmeyecek kadar dk olmaldr.
A rnn ele alalm. Bir birim A rnn imal etmek iin gerekli kaynaklar, 4 saat montaj iilii, 14
saat cilalama iilii ve 1 m
2
depo alandr. Giriimcinin mobilya firmasna bu kaynak bileimi iin en az
40 fiyat nermesi gerekir. nk mobilya irketi arzu ederse, bu kaynak bileimini satmak yerine, 1
birim A rn elde etmek iin kullanp 40 kr elde edebilir. O zaman giriimcinin 1 adet A rn iin
kullanlan kaynaklarn deeri iin en az 40 demesi gerekir ki bu durum aadaki ekilde ifade edilir:
40 y 14y 4y
3 2 1
+ +
Yani, 1 birim A rn imal etmek iin gereken girdilerin deerleri toplamnn A rnnn
kazancndan fazla ya da eit olmas gerekir. Benzer ekilde, giriimci 1 adet B rn iin kullanlan
kaynaklarn toplam deeri iin en az 70 demelidir. Aadaki kst 1 birim B rn imal etmek iin
gereken girdilerin deerleri toplamnn B rnnn kazancndan fazla ya da eit olmas gerektii
anlamna gelmektedir.
70 y 8y 10y
3 2 1
+ +
Kaynaklarn birim fiyatlar negatif deer alamayacandan, izleyen iaret kstlarn da ekleyebiliriz:
0 y y y
3 2 1
, ,
Btn bu yazdklarmz bir araya getirdiimizde aadaki dorusal karar modelini elde ederiz ki, bu
model asl modelimizin ikilidir.
3 2 1
3 2 1
3 2 1
3 2 1
10y 112y 82y Enkv
k.a.
0 y , y , y
70 y 8y 10y
40 y 14y 4y
+ + =
+ +
+ +
zetle, asl model enbykleme amal iken, ikil deikenler modelin kar gelen kaynaklaryla ilgili
fiyat dzeyinin aratrld karar deikenleri olmaktadr. kil modelde i.nci ikil deiken, aslda i.nci
kst ile ilikilidir. rneimizde, y
1
montaj saati, y
2
cilalama saati, y
3
ise depo alan ile ilikili olan ikil
deikenlerdir. kil modeldeki kstlar ise, asl modelin karar deikenlerine kar gelmektedir. Birinci ikil
kst A rnnn imalatn, ikinci ikil kst B rnnn imalatn gz nne alarak oluturulmutur.
ASIL VE KL MODELLERN ZMLER ARASINDAK
LKLER
Asl ve ikil problemlerin zmleri arasndaki ilikiler ana zellie bal olarak aklanabilir. Bunlar,
her iki problemin uygun zmleri arasndaki ilikiyi tanmlayan zayf ikillik zellii, her iki modelin
de eniyi deerlerinin eit olduunu belirten gl ikillik zellii ve eniyi zmleri ilikilendiren
aylakln tamamlayan zellii olarak adlandrlmaktadr.
127
Zayf killik zellii
Zayf ikillik zelliine gre, asl ve ikil problemlerin her ikisi de uygun zml olduunda, bu
modellerin herhangi uygun zmlerine kar gelen ama fonksiyonu deerleri arasnda daima,
deeri fonksiyonu ama
n problemini e Enkklem
deeri fonksiyonu ama
n problemini e Enbyklem
ilikisi salanr.
Bir dorusal programlama problemi iin gelitirilen asl ve ikil modellerden birisi enbykleme amal
ise dieri enkkleme amal olacaktr. Bu iliki iin, hangisinin asl hangisinin ikil problem olduu
deil, eniyilemenin yn nemlidir. Zayf ikillik zelliinden yararlanarak, asl veya ikil problemlerden
birisinin uygun bir zmne kar gelen ama fonksiyonu deerini, dier problemin eniyi deeri iin alt
veya st snr olarak kullanabiliriz. rnein, enkkleme probleminin herhangi bir uygun zmne
kar gelen ama fonksiyonu deeri, enbykleme probleminin eniyi deeri iin bir st snr verecektir.
Benzer ekilde, enbykleme probleminin bir uygun zmne kar gelen ama fonksiyonu deeri,
enkkleme probleminin eniyi deeri iin bir alt snr deeri oluturacaktr.
rnek 6.5.
Bahar Mobilya rneini gz nne alalm. Asl model iin ve ikil model iin uygun zmler
belirleyerek, zayf ikillik zelliini gsterelim.
Uygun zmler ve ama fonksiyonu deerleri,
Asl model iin : X
A
=5 ve X
B
=4 ve Z = 40X
A
+70X
B
= = 40(5) + 70(4) = 480
kil model iin : y
1
=5, y
2
=2, y
3
=4 ve V = 82y
1
+112y
2
+10y
3
= 82(5) + 112(2) + 10y
3
= 670
olsun. Zayf ikillik zelliine gre, enkkleme problemine kar gelen deerin en az, enbykleme
problemine kar gelen deer kadar olmas gerekir. Bahar mobilya rneinde, asl modelimiz
enbykleme ve ikil modelimiz enkkleme amal olup,
Z=480 V=670
olarak gereklemekte ve zayf ikillik zelliinin saland grlmektedir.
Dorusal karar modelinin uygun bir zmnn, modelin tm
kstlarn ayn anda salayan herhangi bir zm olduunu hatrlayalm.
Zayf ikillik zelliinden yararlanarak, asl ve ikil modellerin eniyi deerleri iin snrlar belirlenebilir.
Enkkleme amal ikil modelin eniyi deeri en az 480 en fazla 670 olacaktr. Benzer ekilde,
enbykleme amal asl modelin eniyi deeri en fazla 670, en az 480 olarak elde edilecektir. Buradan,
her iki modelin de eniyi deerlerinin [480, 670] arasnda deiecei sylenebilir.
Gl killik zellii
Gl ikillik zelliine gre, asl veya ikil problemden herhangi birisi snrl deerde bir eniyi zme
sahipse, dierinin de mutlaka bir eniyi zm vardr ve her iki problemin eniyi deerleri birbirine eittir.
Bir baka deyile, asl ve ikil problemlerin bir eniyi deeri varsa, bu deerler arasnda daima,
Enbykleme probleminin
eniyi deeri
=
Enkkleme probleminin
eniyi deeri
ilikisi salanr. Bu zellikten yararlanarak, asl veya ikil modellerden herhangi birinin eniyi deerini
biliyorsak dier modelin eniyi deerinin de buna eit olacan syleyebiliriz. Zayf ve gl ikillik
zellikleri ile ifade edilen ilikiler ekil 6.2de gsterilmektedir.
128
ekil 6.2: Asl ve ikil uygun zmler arasndaki iliki
rnek 6.6.
Bahar mobilya rneinde, asl modelin eniyi zm X
A
=3 ve X
B
=7, ikil modelin eniyi zm de
y
1
=5, y
2
=0 ve y
3
=2 olarak verilsin. Eniyi zmlerin gl ikillik zelliini saladn gsterelim .
Asln eniyi deeri,
Enb Z=40X
A
+70X
B
eitliinden, Enb Z=40(3) + 70(7) = 610
ve ikil modelin eniyi deeri,
Enk V=82y
1
+112y
2
+10y
3
eitliinden, Enk V= 82(5) + 112(0) + 10(20) = 610
olarak bulunur. Grld gibi, asl ve ikil modellerin eniyi zmleri arasnda,
Enbyk Z = Enkk V = 610
ilikisi bulunmakta ve gl ikillik zellii salanmaktadr.
killik Teoremi
Zayf ve gl ikillik zelliklerinden hareketle, bir dorusal programlama problemi iin gelitirilen asl ve
ikil modellerin zmleri ile ilgili, aadaki durumlardan sadece birisi sz konusu olur:
1. Asl ve ikil modellerden her ikisinin snrl deerde eniyi zm vardr ve eniyi deerler
birbirine eittir.
2. Asl modelin uygun bir zm olup ama fonksiyonu deeri snrsz olduunda, ikil modelin
uygun zm yoktur.
3. kil modelin uygun bir zm olup ama fonksiyonu deeri snrsz olduunda, asl modelin
uygun zm yoktur.
4. Hem asl hem de ikil modelin uygun bir zm yoktur.
Karlalabilir durumlar Tablo 6.8de zetlenmektedir. kinci ve nc durumlar ksaca
Modellerden birisinin snrsz deerde zm varsa, dier modelin uygun zm yoktur eklinde de
ifade edilebilir.
Tablo 6.8: Asl ve ikil modellerin zmleri arasndaki ilikiler
ASIL
KL
Snrl, bir eniyi
zm var
Snrsz
deerde zm
Uygun bir
zm yok
Snrl, bir eniyi
zm var
1
Snrsz
deerde zm
3
Uygun bir
zm yok
2 4
129
Aada asl modelleri verilmi, drt adet dorusal programlama
problemi grlmektedir. Her modelin kendisini ve ikilini grafik yntemle zerek, her biri
iin Tablo 6.8de gsterilen zm trlerinden hangisinin sz konusu olduunu bulunuz.
2 1
2 1
2 1
2 1
2
. .
0 ,
2
4
x x Enbz
a k
x x
x x
x x
+ =
+
(a)
2 1
2 1
2 1
2 1
2
. .
0 ,
2
4
x x Enbz
a k
x x
x x
x x
+ =
+
(b)
2 1
2 1
2 1
2 1
2
. .
0 ,
2
4
x x Enbz
a k
x x
x x
x x
+ =
+
(c)
2 1
2 1
2 1
2 1
2
. .
0 ,
2
4
x x Enbz
a k
x x
x x
x x
+ =
(d)
Aylakln Tamamlayan zellii
Aylakln tamamlayan (complementary slackness), ikillik zerine gelitirilen kavram ve teknikleri
btnletirerek, asl ve ikil problemlerin eniyi zmlerini ilikilendiren nemli bir zelliktir. Bir ksta
ait boluk deikeni ve sk kst terimlerinin tanmlanmas, bu zelliin daha kolay anlalmasn
salayacaktr.
Boluk deikeni, eniyi zmde kstn eitsizliin sol tarafndaki deeri ile sa taraf sabiti arasndaki
fark veren deikendir. Eer kst trnde ise boluk deikeni aylak deiken, kst trnde
ise boluk deikeni artk deiken olarak adlandrlr. Eer eniyi zmde, bir ksta ait boluk
deikeni sfra eitse, o kst tam eitlik halinde gerekletii iin o kstn sk kst olduu sylenir.
Ksta eklenen boluk deikeni sfrdan bykse, ya aylak deiken ya da artk deiken sfrdan byk
deer almtr. Kstn sol taraf ile sa taraf sabiti arasnda fark olduundan, kst sk deildir.
Aylakln tamamlayan zellii, asl ve ikil problemler iin uygun olan zmlerin ayn zamanda
eniyi zm olmalarnn ancak ve ancak aadaki koullarn salanmas ile mmkn olacan syler:
Modellerden birisinde bir kstn boluk deikeni sfrdan farkl ise, dier modelde bu ksta
kar gelen deikenin deeri sfra eittir.
Modellerden birisinde bir kstn boluk deikeni sfra eitse, dier modelde bu ksta kar
gelen deikenin deeri sfrdan farkldr.
Yukardaki koullar, aadaki ekilde de ifade edilebiliriz. Bir dorusal programlama probleminin
eniyi zmnde,
i.nci asl kstn boluk deikeni > 0 i.nci ikil deiken = 0
i.nci asl kstn boluk deikeni = 0 i.nci ikil deiken > 0
j.inci ikil kstn boluk deikeni > 0 j.inci asl deiken = 0
j.inci ikil kstn boluk deikeni = 0 j.inci asl deiken > 0
olmak zorundadr. Ksaca, eniyi zmde asl veya ikil modelde bir kst sk deilse, dier modelde bu
ksta kar gelen deiken sfra eit olmak zorundadr. Koullara dikkat edilirse, eniyi zmde,
130
(i.nci asl kstn boluk deikeni deeri) (i.nci ikil deikenin deeri) =0 veya
(j.inci ikil kstn boluk deikeni deeri) (j.inci asl deikenin deeri) =0
eitliklerinin saland grlr.
Eer asl ya da ikil problemlerden birinin eniyi zmn biliyorsak, dier problemin eniyi zmn
aylakln tamamlayan zelliini kullanarak bulabiliriz.
rnek 6.7.
Bahar Mobilya rneinde, asl modelin eniyi zm X
A
=3 ve X
B
=7, ikil modelin eniyi zm y
1
=5,
y
2
=0 ve y
3
=20dir. Asl ve ikil modellerin eniyi zmndeki boluk deikenlerinin deerlerini ve hangi
kstlarn sk kst olduunu bulalm. Daha sonra problemin eniyi zmnde, aylakln tamamlayan
zelliinin salandn gsterelim.
nce asl modeldeki boluk deikenlerini belirleyelim. Tm kstlar eklinde olduundan, her
ksta aylak deiken ekleyerek kstlar eitlik haline getirebiliriz. S
1
, S
2
ve S
3
aylak deikenleri, boluk
deikenlerine kar gelmek zere asl model,
B A
B A
B A
B A
B A
x x Enbz
a k
S S S x x
S x x
S x x
S x x
70 40
. .
0 , , , ,
10
112 8 14
82 10 4
3 2 1
3
2
1
+ =
= + +
= + +
= + +
eklinde standart biime dntrlr. Eniyi zmde aylak deikenlerin deeri;
0 10 ) 7 ( ) 3 ( 10
14 112 ) 7 ( 8 ) 3 ( 14 112 8 14
0 82 ) 7 ( 10 ) 3 ( 4 82 10 4
3 3 3
2 2 2
1 1 1
= = + + = + +
= = + + = + +
= = + + = + +
S S S x x
S S S x x
S S S x x
B A
B A
B A
olarak elde edilir. S
1
= S
3
=0 olduundan birinci ve nc kstlar sk kstlardr. Eniyi zmde, kstn
sol taraf ve sa tarafndaki saysal deerler birbirine eittir. S
2
>0 olduundan ikinci kst sk deildir.
imdi, ikil modeldeki boluk deikenlerini belirleyip, deerlerini hesaplayalm. Tm kstlar
eklinde olduundan, her ksttan artk deiken kararak kstlar eitlik haline getirebiliriz. A
1
, A
2
ve
A
3
artk deikenleri, boluk deikenlerine kar gelmek zere, ikil model,
3 2 1
3 2 1
3 2 1
3 2 1
10y 112y 82y Enkv
k.a.
0 y , y , y
70 y 8y 10y
40 y 14y 4y
+ + =
= + +
= + +
2 1
2
1
, , A A
A
A
biimine getirilir. Eniyi zmde artk deikenlerin deeri,
olarak hesaplanr. A
1
= A
2
=0 olduundan birinci ve ikinci kstlar sk kstlardr.
Yukarda hesaplanan deerlerden hareketle, Tablo 6.9da aylakln tamamlayan zellii
aklanmaktadr. Tablodan grld gibi, eniyi zmde bir modeldeki boluk deikeni ile dier
modelde o ksta kar gelen orijinal deikenin arpm sfra eit olmaktadr.
131
Tablo 6.9: Bahar Mobilyann eniyi zm iin aylakln tamamlayan zelliinin gsterilmesi
Asl Modeldeki Kst
Asln Eniyi zmnde
Boluk Deikenin
Deeri
Eniyi zmde kil
Deikenin Deeri
Aylakln
Tamamlayan
zellii
Montaj saati
Cilalama saati
Depo yeri
S
1
= 0
S
2
= 14
S
3
= 0
y
1
= 5
y
2
= 0
y
3
= 20
S
1
. y
1
= 0
S
2
. y
2
= 0
S
3
. y
3
= 0
kil Modeldeki Kst
kilin Eniyi zmnde
Boluk Deikenin
Deeri
Eniyi zmde
Asl Deikenin
Deeri
Aylakln
Tamamlayan
zellii
A rn iin kaynak deeri
B rn iin kaynak deeri
A
1
= 0
A
2
= 0
x
A
= 3
x
B
= 7
A
1
. x
A
= 0
A
2
. x
B
= 0
KL PROBLEMN ZMNN ASIL SMPLEKS
TABLOSUNDAN ELDE EDLMES
Asl modelin son simpleks tablosu veya eniyi zmn gsteren simpleks tablosu verilmise, ikil
deikenlerin deerini bu tablodan okumak mmkndr. Son simpleks tablosunda, balang temel uygun
zme kar gelen deikenlerin indirgenmi maliyetlerinden, ikil deikenlerin deeri bulunabilir.
ndirgenmi maliyetler, simpleks tablosunun ama fonksiyonu (z) satr veya sfr satr olarak
adlandrlan satrnda yer alan saysal deerlerdir.
Balang simpleks tablosunun ve genel olarak bir ardtrmadaki simpleks tablosunun ematik
gsterimi Tablo 6.10 ve Tablo 6.11 de grlmektedir. Balang tabloda, balang temel deikenlerin z
satrndaki katsaylar sfra eit olup, temel deikenlere kar gelen stunlardaki katsaylar birim matris
oluturmaktadr. zleyen ardtrmalarda ise, balang temel deikenlerin z satrndaki katsaylar
sfrdan kk, sfr veya sfrdan byk deer alabilir.
Asl modelin, son simpleks tablosunun z satrndan, balang temel deikenlere kar gelen
indirgenmi maliyetler bulunur ve izleyen eitlik kullanlarak ikil deikenlerin eniyi deeri hesaplanr:
Eniyi y
i
= [i. asl ksttaki balang temel deikene kar gelen indirgenmi maliyet]
+ [ Balang temel deikenin orijinal modeldeki ama fonksiyonu katsays]
Tablo 6.10: Balang simpleks tablosunun ematik gsterimi
Temel deikenlerin dndaki karar deikenleri
Balang Temel
Deikenler
STS
Z
satr
Z 1 0 0 0
T
e
m
e
l
d
e
k
e
n
l
e
r
0 1 0 0
0 0 1 0
0
0 0 0 1
BRM MATRS
132
Tablo 6.11: Herhangi bir ardtrmadaki simpleks tablosunun ematik gsterimi
Temel deikenlerin dndaki karar deikenleri
Balang Temel
Deikenler
STS
Z
satr
Z 1
T
e
m
e
l
d
e
k
e
n
l
e
r
0
TEMEL
DEKENLERE
MODELDE KARI
GELEN MATRSN
TERS
0
0
Eer asl modelin kstlarna eklenen aylak ve artk deikenleri biliyorsak, son simpleks tablosundan
ikil deikenleri bulmak iin, izleyen yntemi de kullanabiliriz. Aylak ve artk deikenlerin ama
fonksiyonu katsaylar sfr olduundan, asl modelin,
i. kstnda aylak deiken varsa, y
i
= aylak deikenin son tablodaki indirgenmi maliyeti
k. kstnda artk deiken varsa, y
k
= - (artk deikenin son tablodaki indirgenmi maliyeti)
olarak elde edilir.
rnek 6.8.
Bahar mobilya probleminde, asl modelin eniyi zmne kar gelen simpleks tablosu aada
verilmektedir. Bu tablodan hareketle, ikil deikenleri bulalm.
Asl modelde, S
1
birinci ksta, S
2
ikinci ksta ve S
3
nc ksta eklenen aylak deikenlerdir.
Tablodan ikil deikenleri okuyabilmek iin, asln balang temel deikenlerini bilmemiz gerekir.
Balang temel deikenlerin katsaylar, standart biime dntrlm asl modelde birim matris
oluturmaldr. Bunun anlam, her kstta sadece o kstta bulunan ve katsays 1 olan bir karar
deikeninin yer almasdr.
Tablo 6.12: Bahar Mobilya probleminin asl modelin eniyi zmn gsteren simpleks tablosu
Z XA XB STS
Z
satiii
Z 1 u u 61u
T
e
m
e
l
u
e
g
i
,
k
e
n
l
e
i
XB u u 1 u.17 u -u.67
7
S2 u u u 1.uu 1 -18.uu
14
XA u 1 u -u.17 u 1.67
S
Aylak deikenler, karar modelini standart biime dntrmek iin iaretine sahip kstn sol
tarafna eklenen ve ama fonksiyonundaki katsays 0 olan deikenlerdir. Herhangi bir ksta bir aylak
deiken eklediimizde, bu deiken sadece o kstta yer alr ve katsays da 1 olur. Asl modelimizin
kst bulunmakta olup, tm kstlara aylak deiken eklemitir. Bu deikenler ayn zamanda
balang temel deikenlerdir. Bu durumda eniyi zme eriilen son simpleks tablosunda bu
deikenlerin Z satrndaki katsaylar (indirgenmi maliyetleri) bize ikil deikenlerin deerini
verecektir. Tabloda bu deikenlerin altndaki katsaylarn olduu ksm koyu renkli olarak
grlmektedir.
133
Asl modelde her ksta bir ikil deiken kar geldiini hatrlayalm. Bu ikil deikenleri de y
1
, y
2
ve
y
3
olarak adlandralm. kil deikenlerin eniyi deerleri,
y
1
= [S
1
e kar gelen indirgenmi maliyet] + [S
1
in ama fonksiyonu katsays] = 5 + 0 = 5
y
2
= [S
2
ye kar gelen indirgenmi maliyet] + [S
2
nin ama fonksiyonu katsays] = 0 + 0 = 0
y
3
= [S
3
e kar gelen indirgenmi maliyet] + [S
3
n ama fonksiyonu katsays] =20 + 0 = 20
olarak elde edilir. Kaynaklarn birim deerleri srasyla 5, 0 ve 20dir.
KL PROBLEM KULLANARAK ASIL PROBLEMN ZLMES
Baz durumlarda bir dorusal programlama probleminin asl modelini zmek yerine ikil modelini
zmek, ilem yk asndan daha kolay olabilir. Eer problemin asl modelini zmek iin simpleks
ardtrmalarn uygulamak gerekirken, ikil modelin zmn grafik yntemle bulabileceksek,
hesaplama kolayl asndan ikil modelin zm ile uramak bize zaman kazandracaktr. Daha sonra
asl - ikil modellerin zmleri arasndaki ilikileri veren ikillik teoremi ve aylakln tamamlayan
zelliklerini kullanarak asl modelin zmn bulabiliriz.
rnek 6.9.
Aada verilen dorusal programlama modelinin eniyi deerini bulalm.
5 4 3 2 1
5 4 3 2 1
5 4 3 2 1
5 4 3 2 1
3 2 5 3 2
. .
0 , , , ,
3 3 2
4 3 2
x x x x x ENKZ
a k
x x x x x
x x x x x
x x x x x
+ + + + =
+ + +
+ + + +
2
Asl model 2 kstl fakat 5 deikenli olduundan, modeli zebilmek iin Simpleks algoritmasn
kullanmamz gerekir. Simpleks algoritmasn uygularken, modelin standart biimde olmas gerektiinden
her iki ksta ekleyeceimiz artk deikenlerle model 7 deikenli hale gelecektir.
Asl modeldeki her kst iin ikilde bir deiken tanmlandn hatrlarsak, ikil modelin 2 deikenli
bir dorusal programlama modeli olaca ortaya kar. ki deikenli modelleri ise, grafik yntemle
zebiliyoruz. Bu durumda, asl model yerine ikil modeli oluturup zmeyi tercih edebiliriz. kil model
2 deiken ve 5 ksta sahip olacaktr. Asln kanonik biimde verilmi olmas, ikil modelin de aadaki
gibi kolaylkla oluturulmasn salayacaktr.
2 1
2 1
2 1
2 1
2 1
2 1
2 1
3 4
. .
0 ,
3 3
2
5 3 2
3 2
2
y y ENBV
a k
y y
y y
y y
y y
y y
y y
+ =
+
+
+
+
2
Grafik yntemi kullanarak,
5 = V ENB ve
5
3
,
5
4
2 1
= = y y
134
olarak bulunur. Grafik yntemle zm ekil 6.3te grlmektedir. ekildeki yuvarlak ierisindeki
numaralar, srasyla model kstlarna kar gelmektedir. killik teoremine gre, bir modelin eniyi zm
var ve ama fonksiyonu deeri snrl ise, dier modelin de eniyi zm olup her iki modelin eniyi
deerleri birbirine eittir. Bu durumda, asl modelin eniyi deeri, ENKZ=ENKV eitlinden, ENKZ=5
olarak elde edilir.
ekil 6.3: rnek 3teki ikil modelin grafik yntemle en iyi deerinin bulunmas
rnek 9daki asl modelin eniyi zmn, aylakln tamamlayan
zelliini kullanarak bulunuz.
GLGE FYATLAR
Dorusal programlama modellerinde, kaynaklardaki deiimlerin problemin eniyi deerinde ne kadar bir
farklla sebep olacann belirlenmesi, yneticiler iin nemlidir. Fayda - maliyet analizi yapmakta
kullanlan glge fiyatlar, herhangi bir retim kaynann miktarnn bir birim arttrlmas veya
azaltlmas durumunda ama fonksiyonu deerinde meydana gelecek art veya azal olarak
tanmlanr.
kil deikenlerin, asl modelin kstlarna kar geldiini ve kaynaklarn birim deerlerini gsterdiini
biliyoruz. Asln i. kstna kar gelen ikil deikeni y
i
olarak adlandrdmzda, y
i
, i. kstla ifade edilen
kaynan 1 biriminin deerini ya da fiyatn vermektedir. Bahar Mobilya rneinde ikil modelin eniyi
zmnn y
1
=5, y
2
=5 ve y
3
=20 olup eniyi deerin 610 olarak elde edildiini hatrlayalm. Eniyi
deerin hesapland ama fonksiyonu,
3 2 1
10 112 82 y y y Enkv + + =
135
eklinde ifade edilmiti. Varsayalm ki birinci kaynamz olan montaj saatini 1 saat daha arttrmak
istiyoruz. Bu durumda, kapasitesi 82 saat olan kaynan deeri 83 olarak deiir ve yeni ama
fonksiyonu,
3 2 1
10 112 83 y y y Enkv + + =
olarak gsterilir. Eski ve yeni ama fonksiyonu deeri arasndaki deiim miktar ise,
[ ] [ ]
1 3 2 1 3 2 1
10 112 82 10 112 83 y y y y y y y = + + + +
kadar olacaktr.
Asl ve ikil modellerin eniyi deerlerinin birbirine eit olduunu biliyoruz. Bu nedenle, eniyi zme
eriildiinde, i. kaynaktaki birim farkllama ikil modelin ama fonksiyonunda y
i
kadar deiime neden
olurken, ayn deiim, asl modelin ama fonksiyonunun eniyi zme kar gelen deerinde de
grlecektir. Bu deiim, kaynak miktarndaki farkllama sonucunda eniyi zmde temelde yer alan
deikenlerin ayn kalmas yani uygunluk koullarnn bozulmamas varsaym altnda geerlidir.
Yukardaki aklamalara gre, ikil modelin eniyi zmnde yer alan y
i
, i. kaynakta bir birim art
yapldnda uygunluk koullar bozulmuyorsa, asl modelin ama fonksiyonunun eniyi deerinin
kaynaktaki bir birim art karsndaki deiimini vermektedir. Balangtaki glge fiyat tanm
hatrlanrsa, asl modelin i. kstna kar gelen ikil deikenin ayn zamanda i. kaynan glge fiyat
olduu grlr.
zetle, asl modeldeki i. kstn glge fiyat, eer kayna 1 birim arttrrsak, uygunluk koullarnn
korunmas varsaym altnda, ama fonksiyonu deerinde meydana gelecek deiim miktarn
vermektedir. Buna gre, i. kaynaktaki bir birim art, ama fonksiyonunun kar gelen deerinde y
i
kadar
bir arta neden olduundan, karar vericinin bu kaynan bir birim art iin demeye hazr olaca fiyat
en fazla y
i
kadar olmaldr.
Glge fiyat ama fonksiyonundaki deiimi veriyorsa, bir asl problemin i. kstnn sa taraf
sabitindeki
i
kadar deiimin, asl modelin ama fonksiyonunda yapaca farkll glge fiyatlar
yardmyla,
Yeni z deeri = Eski z deeri +
i
. (i. kstn glge fiyat)
eitlii ile tanmlayabiliriz.
i
, i. kstn sa taraf sabitinin yeni deeri ile eski deeri arasndaki farktr.
Eer mevcut kaynak miktarnda azalma olursa
i
<0, eer mevcut miktardan art olursa
i
> 0 olacaktr.
Glge fiyatlar, negatif iaretli, pozitif iaretli veya sfra eit olabilir.
Aylakln tamamlayan zelliine gre, asl modelin eniyi zmnde sk olmayan kstlarla ilikili
ikil deikenlerin deeri sfra eit olmak zorundadr. kil deikenler glge fiyatlara kar geldiinden,
sk kstlarn glge fiyatlarnn sfrdan farkl olduu, sk olmayan kstlarn glge fiyatlarnn sfra eit
olduunu syleyebiliriz. Bu durumu kavramsal olarak aklayalm. Sk olmayan ksttaki kaynaktan
elimizde fazla miktarda vardr. Elimizde zaten olan bir kayna arttrmak, eniyi deeri arttrmayacaktr.
Ekonomik olarak, glge fiyat sfr olan byle kaynaklar serbest mal olarak adlandrlr. Glge fiyatlarn
sfr olmas, ilgili kaynaklardan bolluk ifadesidir. Dolays ile birim bana deeri sfrdr. Dier yandan,
sk kstlar kt kaynaklara iaret eder. Bu kaynaklardan elimizde kullanacak miktar kalmamtr. Byle
kaynaklarn sfrdan farkl bir glge fiyat vardr.
Asl problemin ikil zm, tad ekonomik anlam nedeniyle olduka nemlidir. Asl problem bir
retim olayna dair eitli kstlar altnda enbykleme sorunu iken, ikil deikenler karar vericiye
salanabilecek kaynaklarn deerine ilikin bilgi vermektedir. kil deikenlerin eniyi deerleri olarak
adlandrlan glge fiyatlarn hesaplanmas, karar vericiye kazancnn ne kadarnn her bir girdiden
kaynaklandn belirlemesi konusunda yardmc olacaktr. Yneticiler, ek kaynak kullanm ile retim ve
yatrm ile ilgili kararlarn, glge fiyat kavramndan yararlanarak verebilir.
136
rnek 6.10.
Bahar Mobilya probleminde her bir kaynan glge fiyatn bulunuz. Kaynaklardaki 1 birim art veya
azalma iin, uygunluk koullarnn deimediini varsayarak, glge fiyatlarn ne anlama geldiini
aklaynz.
kil deikenlerin eniyi deerleri, kaynaklarn glge fiyatlarn vermektedir. Her ksta kar gelen
kaynaklar srasyla montaj saati, cilalama saati ve depo yer alan olup, ikil deikenlerin eniyi deeri
y
1
=5, y
2
=0 ve y
3
=20dir. Glge fiyatlarn ifade ettii anlamlar, izleyen ekilde aklanabilir:
Montaj sresinin glge fiyat 5tir. Kullanlabilir montaj sresini 1 saat arttrmak eniyi deerde
y
1
kadar yani 5 art salayacaktr. Bu durumda, iletme yneticisi montaj sresini 1 saat
arttrmak iin en fazla 5 harcamaya raz olacaktr. Eer ynetici, eniyi zme eriildiinde
mevcut montaj sresini 1 saat daha az kullanrsa 5 daha az kr elde edecektir.
Cilalama sresinin glge fiyat sfrdr. Cilalamaya ayrlan srenin 1 saat daha arttrlmas eniyi
deerde (karda) bir deiim yaratmayacaktr. Benzer ekilde cilalama sresini 1 saat azaltmakta
eniyi deeri deitirmeyecektir. Yani karda bir farkllk yaratmayacaktr. Eniyi zme
eriildiinde, kullanlmayan cilalama saati bulunmaktadr. Buna atl kapasite olarak baklabilir.
Kullanabileceimiz fakat kullanmadmzdan atl kapasite olarak duran bir kaynan glge
fiyat daima sfr olacaktr.
Depo yer alannn glge fiyat 20dir. Bunun anlam depo yer alann 1 birim (1 m
2
) arttrrsak,
eniyi deerde (enbyk kar) 20 kadar art, depo yer alann 1 m
2
azaltrsak, karmzda 20
kadar azalma meydana geleceidir. Bir dier deyile, iletme yneticisi depo yer alann 1 m
2
arttrmak iin en fazla 20 harcamaya raz olacaktr.
Bahar Mobilya problemi iin, Tablo 6.12de asl modelin eniyi
zmn gsteren simpleks tablosunu ve Tablo 6.13de verilen duyarllk analizi
sonularn gz nne alarak, izleyen durumlarn her birini birbirinden bamsz olarak
ele alp, enbyk kardaki deiim miktarn hesaplaynz.
a. Montaj ii iin kullanlabilir srenin 75 saate drlmesi.
b. Cilalama ii iin mevcut kapasitenin 150 saate karlmas.
c. Depo yer alannn 9 m
2
ye drlmesi.
d. Depo yer alannn 12m
2
ye karlmas.
Tablo 6.13: Kstlarn sa taraf sabitlerindeki deiime ynelik duyarllk analizi sonular
Asl kst
Mevcut
durumdaki
kaynak miktar
Mevcut temelin korunduu
kaynak miktarlar
Glge fiyat
En az En fazla
Montaj saati 82 saat 68 100 5
Cilalama saati 112 saat 98 0
Depo yer alan 10 m
2
8.20 10.78 20
137
zet
Her dorusal karar probleminin, gerekte asl
ve ikil olarak adlandrlan, birbiriyle yakndan
ilikili iki ayr modeli vardr. Asl problem veya
asl model, ilgilenilen ve eniyi zmn
aradmz problemdir. Dorusal programlama
problemleri ile ilgili zm teknikleri, asl
modellerin zm zerine younlamtr. kil
model ise, asl modelin parametrelerini
kullanarak oluturulan ve kart ynde ama
fonksiyonuna sahip olan dier modeldir.
Asl problem genellikle, kaynak kstlar altnda,
enbyk kazanl rn imal etme ya da satma
problemi iken, ikil problem, asl problemin kart
olarak, kr kstlar altnda, enkk maliyetli
kaynak satn alma problemi olarak ortaya
kmaktadr. Asl ve ikil problemlerin zmleri
arasndaki ilikiler ana zellie bal olarak
aklanabilmektedir. Bunlar, her iki problemin
uygun zmleri arasndaki ilikiyi tanmlayan
zayf ikillik zellii, her iki modelin de eniyi
deerlerinin eit olduunu belirten gl ikillik
zellii ve eniyi zmleri ilikilendiren
aylakln tamamlayan zellii olarak
adlandrlmaktadr.
Asl modelin son simpleks tablosu veya eniyi
zmn gsteren simpleks tablosu verilmise,
ikil deikenlerin deerini bu tablodan okumak
mmkndr. Son simpleks tablosunda, balang
temel uygun zme kar gelen deikenlerin
indirgenmi maliyetlerinden, ikil deikenlerin
deeri bulunabilmektedir. Baz durumlarda bir
dorusal programlama probleminin asl modelini
zmek yerine ikil modelini zmek, ilem yk
asndan daha kolay olabilir.
killiin dorusal programlamann en nemli
konularndan birisi olmasnn balca sebebi ise,
ikil modelin, asl problemle ilgili nemli
ekonomik aklamalar ve yorum yapma olana
sunmasdr. Glge fiyat olarak da adlandrlan ikil
deikenler, kaynaklarn birim deerlerini
vermektedir. Glge fiyatlarn hesaplanmas,
karar vericiye kazancnn ne kadarnn her bir
girdiden kaynaklandn belirlemesi konusunda
yardmc olmaktadr.
138
Kendimizi Snayalm
1.
3 2 1
3 2 1
2 1
3 2
3 1
2
0 , ,
3
2
1
x x x Enbz
x x x
x x
x x
x x
+ + =
+
+
+
k.a.
Yukarda grlen dorusal karar modelinin ikili
aadakilerden hangisidir?
a.
3 2 1
3 2 1
2 1
3 2
3 1
2
0 , ,
1
1
2
y y y Enbv
y y y
y y
y y
y y
+ + =
+
+
+
b.
3 2 1
3 2 1
2 1
3 2
3 1
3 2
0 , ,
1
1
2
y y y Enkv
y y y
y y
y y
y y
+ + =
+
+
+
c.
3 2 1
3 2 1
2 1
3 2
3 1
2
0 , ,
1
1
2
y y y Enkv
y y y
y y
y y
y y
+ + =
+
+
+
d.
3 2 1
3 2 1
2 1
3 2
2 1
3 2
0 , ,
1
1
2
y y y Enkv
y y y
y y
y y
y y
+ + =
+
+
+
e.
3 2 1
3 2 1
2 1
3 2
3 1
3 2
0 , ,
1
1
2
y y y Enbv
y y y
y y
y y
y y
+ + =
+
+
+
2.
2 1
2 1
2 1
2 1
2 1
4
0 ,
3
3 2
6 3 4
x x Enbz
x x
x x
x x
x x
=
= +
+
+
k.a.
3 3
Yukarda grlen dorusal karar modelinin ikili
aadakilerden hangisidir?
a.
3 2 1
3 2 1
3 2 1
3 2 1
3 3 6
. .
, ,
1 3 2 3
4 3 4
y y y Enkv
a k
y y y
y y y
y y y
+ + =
+ +
+ +
0
b.
3 2 1
3 2 1
3 2 1
3 2 1
3 3 6
. .
, ,
1 3 2 3
4 3 4
y y y Enbv
a k
y y y
y y y
y y y
+ + =
= + +
+ +
0
c.
3 2 1
3 2 1
3 2 1
3 2 1
3 3 6
. .
, 0 , 0
1 3 2 3
4 3 4
y y y Enkv
a k
serbest y y y
y y y
y y y
+ + =
+ +
+ +
d.
2 1
2 1
2 1
2 1
3 6
. .
0 , 0
1 2 3
4 4
y y Enkv
a k
y y
y y
y y
+ =
+
+
e.
3 2 1
3 2 1
3 2 1
3 2 1
3 3 6
. .
, 0 , 0
1 3 2 3
4 3 4
y y y Enbv
a k
serbest y y y
y y y
y y y
+ + =
+ +
+ +
139
3. Aadaki ifadelerden hangisi yanltr?
a. Asl problem karn enbyklenmesi ise, ikil
deikenler kaynaklarn kapasitelerini verir.
b. Asl modeldeki i. ksta, i. ikil deiken kar
gelir.
c. kil modeldeki j. kst, asl modelin j. karar
deikeni ile ilikilidir.
d. Kanonik biimde yazlm bir asl problemde,
ikil deikenler negatif deer alamaz.
e. Asl problemde ama enbykleme ise, ikil
problemde ama enkklemedir.
4.
2 1
2 1
2 1
2 1
4 2
. .
,
2
1 4
y y Enkv
a k
y y
y y
y y
+ =
+
+
0
Yukarda bir dorusal programlama probleminin
ikil modeli verilmitir. Asl ve ikil modellerin
zmleri hakknda aadakilerden hangisi
sylenebilir?
a. Her iki modelin de eniyi zm vardr.
b. Her iki modelin de uygun zm yoktur.
c. Asl modelin eniyi zm vardr, ikil
modelin zm snrsz deerdedir.
d. kil modelin eniyi zm vardr, asl
modelin uygun zm yoktur.
e. kil modelin snrsz deerde zm vardr,
asl modelin uygun bir zm yoktur.
5.
3 2 1
3 2 1
3 2 1
3 2 1
4 7 2
0
10 2 3 3
10 2
x x x Enbz
k.a.
,x ,x x
x x x
x x x
+ + =
+ +
+ +
Yukarda bir dorusal programlama probleminin
asl modeli verilmitir. kil modelin uygun bir
zmnde, ikil deikenlerin y
1
=0 ve y
2
= 5/2
deerlerini ald bilinmektedir. Asl modelin
eniyi deeri ile ilgili aadakilerden hangisi
dorudur?
a. Enbz 50
b. Enbz 25
c. Enbz 35
d. Enbz > 25
e. Enbz =35
6.
3 2 1
3 2 1
3 2 1
3 2 1
3 5
0
7 2
6 2
x x x Enbz
k.a.
,x ,x x
x x x
x x x
+ + =
+ +
+ +
Yukarda asl modeli verilen bir dorusal
programlama probleminde, S
1
ve S
2
, modelin
eitlik halindeki gsteriminde kstlara eklenen
aylak deikenler olsun. kil deikenlerin eniyi
deerlerinin y
1
=7/3 ve y
2
= 1/3 olduu biliniyorsa,
eniyi zmde aadakilerden hangisi salanr?
a. S
1
> 0 ve S
2
= 0
b. S
1
= 0 ve S
2
> 0
c. S
1
= 0 ve S
2
= 0
d. S
1
< 0 ve S
2
< 0
e. S
1
< 0 ve S
2
= 0
140
7.
2 1
2 1
2 1
2 1
2 3
0 ,
50 2
40 2
x x Enbz
x x
x x
x x
+ =
+
+
k.a.
Z X
1
X
2
S
1
S
2
STS
Z 1 0 0 1/3 4/3 80
X
1
0 1 0 -1/3 2/3 20
X
2
0 0 1 2/3 -1/3 10
Yukarda bir dorusal karar modeli ve modelin
eniyi zmn veren simpleks tablosu
grlmektedir. kil deikenlerin deeri
aadakilerden hangisidir?
a. (20 , 10)
b. (-1/3, 2/3)
c. (2/3, -1/3)
d. (1/3, 4/3, 2/3)
e. (1/3, 4/3)
8.
3 2 1 0
3 2 1
3 2 1
5 4 10
0 , ,
50 3 7 5
x x x x Enk
x x x
x x x
+ + =
+
k.a.
Yukarda verilen dorusal karar modelinin eniyi
deeri, aadakilerden hangisidir?
a. 100
b.
3
250
c.
7
200
d. 150
e. 235
9. Kr enbykleme amal ve kstl bir
dorusal karar modelinin eniyi deeri 50000
olarak elde edilmitir. Eniyi zmde kaynaklarn
glge fiyatlar srasyla, 0, 20 ve 15tir. kinci
kstn kaynak miktarnn 750 saat olduunu ve
yaplan duyarllk analizine gre ikinci kstn
kaynak miktarnn 600 ile 850 arasnda kalmas
durumunda eldeki temelin korunacan varsayn.
Eer ikinci kaynan miktar 800 saate karlrsa,
elde edilecek enbyk kr deeri aadakilerden
hangisi olur?
a. 51000
b. 50000
c. 50500
d. 52000
e. 55000
10. Enbykleme amal ve drt kstl bir
dorusal karar modelinin, eniyi deeri 1000,
kstlara kar gelen ikil deikenlerin eniyi
deerleri de y
1
= 400, y
2
= 0, y
3
= 200 ve y
4
= 16
olarak bulunmutur. Birinci kstn sa taraf
sabitinin deeri mevcut durumda 3.5 iken,
uygunluk koullarnn korunduu varsaym ile
3.55 olmas durumunda eniyi deer ne olur?
a. 1000
b. 1020
c. 980
d. 1400
e. 1100
141
Kendimizi Snayalm Yant
Anahtar
1. b Yantnz yanl ise Dorusal Karar
Modelinin kili balkl konuyu yeniden gzden
geiriniz.
2. c Yantnz yanl ise Dorusal Karar
Modelinin kili balkl konuyu yeniden gzden
geiriniz.
3. a Yantnz yanl ise kil Deikenlerin
Ekonomik Anlam balkl konuyu yeniden
gzden geiriniz.
4. e Yantnz yanl ise Asl ve kil Modellerin
zmleri Arasndaki likiler balkl konuyu
yeniden gzden geiriniz.
5. b Yantnz yanl ise Asl ve kil Modellerin
zmleri Arasndaki likiler balkl konuyu
yeniden gzden geiriniz.
6. c Yantnz yanl ise Asl ve kil Modellerin
zmleri Arasndaki likiler balkl konuyu
yeniden gzden geiriniz.
7. e Yantnz yanl ise Asl Simpleks
Tablosundan kil zmn Elde Edilmesi
balkl konuyu yeniden gzden geiriniz.
8. b Yantnz yanl ise kil Modeli Kullanarak
Asl Modelin zlmesi balkl konuyu
yeniden gzden geiriniz.
9. a Yantnz yanl ise Glge Fiyatlar balkl
konuyu yeniden gzden geiriniz.
10. c Yantnz yanl ise Glge Fiyatlar
balkl konuyu yeniden gzden geiriniz.
Sra Sizde Yant Anahtar
Sra Sizde 1
kil deikenlere y
1
ve y
2
ise, ikil model:
2 1
2 1
2 1
2 1
7 4
. .
0 ,
8 2
6 5 3
y y Enbv
a k
y y
y y
y y
+ =
+
+
olarak elde edilir.
Daha sonra yukardaki model asl model olarak
ele alnp ikili yazldnda, balangtaki asl
modelin aynsnn elde edildii grlr.
Sra Sizde 2
a. Asl modele kar gelen ikil model
2 1
2 1
2 1
2 1
2y -4y Enkv
k.a.
0 y , y
1 y - y
2 y y -
+ =
+
Asl modelin grafik yntemle zm
142
kil modelin grafik yntemle zm
Sonu olarak, hem asl hem ikil modelin uygun
bir zm yoktur.
(Tablodaki 4. durum).
b. Asl modele kar gelen ikil model
2 1
2 1
2 1
2 1
2y -4y Enkv
k.a.
0 y , y
1 y y -
2 y y -
+ =
+
+
Asl modelin grafik yntemle zm
kil modelin grafik yntemle zm
Asl modelin uygun zm yokken, ikil modelin
ama fonksiyonu snrsz deerdedir.
(Tablodaki 3. durum).
c. Asl modele kar gelen ikil model
Asl modelin grafik yntemle zm
Grld gibi asl modelin eniyi zm vardr.
Bu durumda ikil modelin de eniyi zm
olduunu ve eniyi deerlerinin birbirine eit
olduunu dorudan syleyebiliriz.
(Tablodaki 1. durum).
2 1
2 1
2 1
2 1
2 4
. .
0 ,
1
2
y y Enkv
a k
y y
y y
y y
+ =
+
143
d.
Asl modelin grafik yntemle zm
Asl modelin ama fonksiyonu snrsz
deerdedir. Bu durumda, ikil modelin uygun
zmnn olmadn dorudan syleyebiliriz.
(Tablodaki 2. durum).
Sra Sizde 3
ncelikle aylak ve artk deikenleri ekleyerek,
her iki modeli de standart biime dntrelim.
Standart biime dntrlm asl model
(x
6
ve x
7
artk deikenler)
5 4 3 2 1
5 4 3 2 1
7 5 4 3 2 1
6 5 4 3 2 1
3 2 5 3 2
. .
0 , , , ,
3 3 2
4 3 2
x x x x x ENKZ
a k
x x x x x
x x x x x x
x x x x x x
+ + + + =
= + + +
= + + + +
2
Standart biime dntrlm ikil model
(y
3
, y
4
, y
5
, y
6
ve y
7
artk deikenler)
2 1
2 1
7 2 1
6 2 1
5 2 1
4 2 1
3 2 1
3 4
. .
0 ,
3 3
2
5 3 2
3 2
2
y y ENBV
a k
y y
y y y
y y y
y y y
y y y
y y y
+ =
= + +
= + +
= + +
= +
= + +
2
kil modelde, eniyi zm deerlerini yerine
koyarak, artk deikenlerin deerini bulalm.
0 3
5
3
5
4
3
5
3
2
5
3
5
4
5
7
5
5
3
3
5
4
2
5
17
3
5
3
2
5
4
0 2
5
3
2
5
4
7 7
6 6
5 5
4 4
3 3
= = +
= = +
= = +
= = +
= = +
y y
y y
y y
y y
y y
Aylakln tamamlayan zelliine gre, eniyi
zmde izleyen tabloda grlen eitlikler
salanmak zorundadr:
Aylakln
Tamamlayan zellii
Sonu
x
6
. y
1
= 0
x
7
. y
2
= 0
x
6
. (4/5)
= 0 x
6
= 0
x
7.
(3/5)
= 0 x
7
= 0
Aylakln
Tamamlayan zellii
Sonu
x
1
. y
3
= 0
x
2
. y
4
= 0
x
3
. y
5
= 0
x
4
. y
6
= 0
x
5
. y
7
= 0
x
1
. (0) = 0 x
1
> 0
x
2
. (17/5) = 0 x
2
= 0
x
3
. (7/5) = 0 x
3
= 0
x
4
. (3/5) = 0 x
4
= 0
x
5
. (0) = 0 x
5
> 0
Tablonun en sandaki stunda yer alan deerlere
gre standart biimdeki asl modeli tekrar
oluturursak, aada grld gibi 2
bilinmeyenli 2 kstl bir dorusal denklem
sistemi karmza kar.
2 1
2 1
2 1
2 1
2 4
. .
0 ,
1
2
y y Enkv
a k
y y
y y
y y
+ =
+
144
3 2
4 3
5 1
5 1
= +
= +
x x
x x
Bu denklem sistemini zdmzde, x
1
=1 ve
x
5
=1 olarak elde edilir. Sonu olarak, asl
modelin eniyi zm,
x
1
=1, x
2
=0, x
3
=0, x
4
=0 ve x
5
=1 ve
eniyi deeri 5 olarak elde edilir.
Sra Sizde 4
a. Kaynaklardaki deiimin, ama fonksiyonu
deerinde yapaca farkllamay bulabilmek
iin, kaynan glge fiyatn kullanmamz
gerekmektedir. Karar modelinin zm ile
hesaplanan glge fiyatlar ise, uygunluk koullar
korunduu srece geerlidir. ncelikle
kaynaktaki deiimin, duyarllk analizi
sonularna gre eniyi temelin korunduu snrlar
ierisinde olup olmad yani uygunluk
koullarnn korunup korunmad kontrol
edilmelidir.
Duyarllk analizi sonucuna gre, montaj sresi
75 saate drldnde, mevcut temel
korunmaktadr. O zaman montaj sresine kar
gelen glge fiyat kullanarak ama
fonksiyonunun yeni deerini hesaplayabiliriz.
Yeni z = Eski z +
1
(1. kstn glge fiyat)
Yeni z = 610 + ( 75 82) (5) = 610 35 = 575
Sonu olarak, kullanlabilir montaj saatinin, 7
saat daha az olmas elde edilecek enbyk kar
35 azaltmaktadr.
b. Duyarllk analizi sonucuna gre, cilalama
sresi 150 saate drldnde, mevcut temel
korunmaktadr. Bu kaynaa ait glge fiyat sfr
olduundan, karda hibir deiim olmayacaktr.
c. Duyarllk analizi sonucuna gre, depo yer
alan 9 m
2
ye drldnde, mevcut temel
korunmaktadr.
Yeni z = Eski z +
3
(3. kstn glge fiyat)
Yeni z = 610 + ( 9 10 ) (20) = 610 20 =590
Sonu olarak, depo yerinin 1 m
2
azaltlmas,
enbyk kar 20 azaltmaktadr.
d. Duyarllk analizi sonucuna gre, depo yer
alan 12 m
2
ye karldnda, uygunluk koullar
bozulmaktadr. Eniyi temel deieceinden,
kaynaklarn glge fiyatlar da deiecektir.
Dolaysyla, bu verilere gre enbyk kardaki
deiimi syleyemeyiz.
145
Yararlanlan Kaynaklar
Hillier, F.S. ve Lieberman, G.J. (2010).
Introduction to Operations Research, New
York: McGraw-Hill, Inc.
Kara, . (2000). Dorusal Programlama,
stanbul: Bilim Teknik Yaynevi.
ztrk, A. (2011). Yneylem Aratrmas,
Bursa: Ekin Yaynevi.
Taha, H.A. (2011). Operations Research: An
Introduction, Upper Saddle River, N.J.: Prentice
Hall.
Winston, W.L. (2004). Operations Research:
Applications and Algorithms, Cengage:
Brooks/ Cole.
146
Amalarmz
Bu niteyi tamamladktan sonra;
Hedef programlama ynteminin gerek hayat problemlerindeki nemini tartabilecek,
Hedef programlama ynteminin temel kavram ve varsaymlarn aklayabilecek,
Hedef kstlar ve ama fonksiyonlarn matematiksel olarak formle edebilecek,
Farkl sistemlere ilikin ok amal problemlerin hedef programlama modellerini
gelitirebilecek,
ok amal problemleri grafik zerinde zebilecek ve verilen grafikleri zmleyebilecek
bilgi ve becerilere sahip olabilirsiniz.
Anahtar Kavramlar
Hedef Programlama
Hedef
Hedef Kst
Pozitif Sapma Deikeni
Negatif Sapma Deikeni
Ama ncelikleri
Modelleme
Grafik Yntem
indekiler
Giri
Hedef Programlamada Temel Kavramlar
Dorusal Hedef Programlamann Varsaymlar
Hedef Programlama ve Dorusal Programlama Arasndaki Farklar
Dorusal Hedef Programlama Trleri
Dorusal Hedef Programlamada Karar Modelinin Oluturulmas
Dorusal Hedef Programlama Trleri
Hedef Programlamada zm Yaklamlar
7
147
GR
nceki blmlerde de ele alnd zere, ele alnan problemler iin en iyi zm yneylem aratrmas
dorusal programlama konusu kapsamnda aratrlmaktadr. Bu en iyi zm, problem trne bal
olarak en kk yllk maliyet veya en byk yllk kr gibi en byk veya en kk deerdir.
Dolaysyla, dorusal programlama modelinde ama fonksiyonu enkkleme veya enbykleme
eklinde oluturulur.
Gerek hayatta ise karlalan problemlerin ou birden fazla ve genellikle birbiriyle elien amaca
sahiptir. rnein, elektronik rnler satan bir iletme yaz mevsiminde klima satlarnda karn
enbyklemek isterken, elde tutulan klima stoku miktarnn en yksek dzeyde olmasn ve dier bir
yandan da envanter tama maliyetlerinin en kklenmesini ister. Bu amalarn yan sra baka amalar
da olabilir. Ynetimin amac, tm bu amalar ayn anda gerekletirmektir. Ancak, birden fazla amacn
ayn anda ele alnd bu tr karar problemlerinin zmnde, nceki blmlerde kullandmz dorusal
programlama yntemi yetersiz kalmaktadr. Dorusal programlama modelleri ile yllk sipari verme
maliyetlerinin en kklenmesi, yllk karn enbyklenmesi gibi sadece tek bir amacn eniyilenmeye
alld problemler ele alnabilmektedir. Birden fazla amacn eniyilenmeye alld problemlerin
zmnde ise ok amal karar verme yntemlerine ihtiya duyulur. Bu yntemlerden biri de Hedef
Programlama yntemidir.
Birden fazla amac ayn anda gerekletirme esasna dayanan Hedef Programlama, retim
planlamadan i gc planlamasna, ulatrmadan finansal planlamaya birok alanda uygulanan bir
yntemdir. Her bir ama bir hedefi oluturmaktadr. Bu da, amalar iin saysal hedeflerin
belirlenmesi ile gerekleir. Bu yntem ile tm sistem kstlarnn saland ve mmkn olduunca tm
hedeflere ulaan bir zm elde edilir. Belirlenen hedeflerin tam olarak gereklememesi durumunda
hedef deerlerinden istenmeyen yndeki sapmalar enkklenir. Elde edilen zmde baz amalar en iyi
deerine ularken, dier amalar en iyi zme ulaamayabilir. Dolaysyla, sonu deer mmkn
olduunca karar vericileri tatmin eden, en uzlak zm olacaktr. Bir baka ifadeyle, etkin bir zm
elde edilecektir.
Birden fazla ve genellikle elien amalar iermesinin yan sra, hedef programlamay dorusal
programlamadan ayran bir dier zellii de ama fonksiyonunda yer alan sapma deikenlerinin farkl
leklerle ifade edilebilir olmasdr. Bir depo ve envanter sisteminden rnek verecek olursak, envanter
maliyetlerini en kklemek ve envanter seviyesini en uygun miktarda tutmak ncelikli amalardandr.
Burada belirlenen hedefler dorultusunda en kklenecek olan sapmalardan biri para birimi dieri de
envanter trne gre envanter says/arlk vb. leinde olacaktr.
Kstlarnnn ve ama fonksiyonunun yapsna bal olarak dorusal ve dorusal olmayan hedef
programlama yntemleri bulunmaktadr. Bu nitede dorusal hedef programlama yntemi incelenecektir.
Hedef programlamay dorusal programlamadan ayran en nemli
zellik birden fazla amacn eniyilenmeye allmasdr. Bu nedenle, en iyi zm yerine
etkin bir zm elde edilmektedir.
Hedef Programlama
148
HEDEF PROGRAMLAMADA TEMEL KAVRAMLAR
Dorusal programlama modellerindeki sa taraf sabiti, karar deikeni ve parametre tanmlarna ek olarak
hedef programlamada kullanlan temel kavramlar unlardr:
Ama: Karar vericinin isteinin genel durumunu gsteren ifadedir. rnein envanter sipari verme
maliyetlerini enkklemek, emniyet stoku miktarn enkklemek, yllk kar enbyklemek, pazar
payn korumak vb.
Hedef: Belirlenen ama iin baarmak istenilen kesin ifadedir. Bir baka deyile, istenilen seviye ile
belirlenmi bir amatr (Ignizio, 1976). rnein, toplam aylk envanter tama maliyetlerini en
kklemek bir ama iken, bu maliyetlerin en fazla 10.000. olmas bir hedeftir. Yllk kar en
byklemek de bir ama iken, yllk karn en az 2.000.000. olmas da bir baka hedeftir.
Kstlar: Hedef programlamada sistem kstlar ve hedef kstlar olmak zere iki tr kst
bulunmaktadr.
1. Sistem Kstlar: Tam olarak salanmas gereken ve sapmaya izin verilmeyen kstlardr. Bu
kstlar, eldeki kt kaynaklar ifade eder ve dorusal programlama problemlerindeki kstlara kar gelirler.
Dorusal programlamadaki gibi formle edilirler ve ncelikle bu kstlarn gerekletirilmesi gerekir
(Cinemre, 2011; ztrk, 2011).
2. Hedef Kstlar: Karar vericinin ulamay istedii veya gerekli grd hedefler, hedef
programlama modeline hedef kstlar olarak aktarlr. Hedef kstlar ok kat olamayp hedeflenen
deerlerden (sa taraf deerleri) sapmalarn aklanmasyla ortaya kan esnek kst fonksiyonlardr.
Hedef kstlarnn salanmas sistem kstlarnn gerekletirilmesinden sonra gelir (Cinemre, 2011).
Hedef kstlarnn genel hali izleyen ekildedir:
Sapma deikenleri: Sadece hedef kstlar ve modelin ama fonksiyonunda yer alan sapma
deikenleri, istenilen hedefin almas ve altnda kalnmas durumlarn gsteren deikenlerdir. Her bir
hedef iin birer negatif sapma ve pozitif sapma deikeni tanmlanr. Sapma deikenleri negatif deer
alamazlar. Ayrca, belirlenen hedefin sadece ya altnda ya da stnde bir durum gerekleeceinden,
negatif ve pozitif sapma deikenlerinden biri daima sfr deerini alr.
1. Pozitif sapma deikeni (
): Hedefin ne kadar aldn gsteren deikendir. rnein, bir
otomobil firmasnda motor montaj hattndaki toplam yar mamul stoku gnlk en fazla 25 adet olmal
hedefine karlk yar mamul stokunun gnlk 30 adet olmas durumunda, hedef miktar aldndan,
pozitif sapma deikeni 5 adet olacaktr.
Hedef : en fazla 25 (adet/gn)
Gerekleen : 30 (adet/gn)
2. Negatif sapma deikeni (
): Hedefin ne kadar altnda kalndn gsteren deikendir.
rnein, bir otomobil firmasnda yllk retim miktar en az 30.000 adet olmal hedefine karlk yllk
retim miktarnn 28.000 adet olmas durumunda, hedef miktarna ulalamadndan, negatif sapma
deikeni deeri 2.000 adet olacaktr.
Hedef : en az 30.000 (adet/yl)
Gerekleen : 28.000 (adet/yl)
Hedef kstlarna bal olarak sapma deikenleri istenen veya istenmeyen deiken olarak da
adlandrlr.
Hedeflenen miktardan sapma = 30-25=5 (adet/gn)
Hedeflenen miktardan sapma = 30.000-28.000
= 2.000 (adet/yl)
149
hedef kst ynnde ise
istenen,
ise istenmeyen sapma deikenidir.
hedef kst ynnde ise
istenen,
ise istenmeyen sapma deikenidir.
hedef kst eitlik eklinde (=) ise
ve
nn her ikisi de istenmeyen sapma deikenleridir.
Hedefin eitlik eklinde olmasna da bir rnek verelim. Otomobil firmas yllk retim miktarnn tam
olarak 20.000 adet olmasn hedeflerken, yllk retim miktar 22.000 adet olarak gereklemi olsun.
Hedef miktarna ulalamam ve hedeften pozitif ynde 2000 adetlik bir sapma olmutur. Ayn zamanda
negatif sapma deikeni deeri de sfr olmutur.
Hedef : tam olarak 20.000 (adet/yl)
Gerekleen : 22.000 (adet/yl)
Baar fonksiyonlar: Her bir ama iin belirlenen hedeften olabilecek sapmalar en kkleyen
fonksiyonlardr.
Ama fonksiyonu: Hedef programlamada ama, hedef deerlerinden istenmeyen yndeki sapmalar
enkklemektir. Dolaysyla ama fonksiyonu, tm baar fonksiyonlarnn bir ncelik seviyesi
ve/veya arla gre toplamlar eklinde yazlan fonksiyondur.
Yukarda verilen rneklerde,
yllk retim hedefinin altnda kalnmak istenmediinde, ama fonksiyonu tek bir hedef iin
gnlk stok hedefinin stne klmak istenmediinde, ama fonksiyonu tek bir hedef iin
yllk retim hacminin tam olarak salanmas istendiinde ama fonksiyonu tek bir hedef iin
olarak belirlenecektir.
DORUSAL HEDEF PROGRAMLAMANIN VARSAYIMLARI
Bir problemin dorusal karar modelinin baz varsaymlar altnda kurulduunu nceki blmlerde
grmtk. Dorusal hedef programlama modeli ile uygun bir zm elde edebilmek iin, dorusal karar
modeli iin geerli olan oransallk, toplanabilirlik, blnebilirlik ve belirlilik varsaymlarnn salanmas
gerekmektedir. Yan sra, aada verilen varsaymlar da salanmaldr:
Negatif olmama varsaym: Modelde yer alan karar ve sapma deikenleri pozitif (sfr veya sfrdan
byk) olmaldr.
( simgesi, herbir anlamn tamaktadr.)
Amalara ncelik verilmesi varsaym: Karar vericiler modelde yer alan her bir amaca ya da ama
grubuna bir ncelik verebilir. En nemli ama ncelii, bir baka deyile birinci ncelikli ama ncelii
ile gsterilir. kinci ncelikli ama iin
gsterimi kullanlr. Dier ncelikler de
ile ifade
edilir. Burada dikkat edilmesi gereken nokta
in
den,
nin de
ten daima byk olduudur.
Amalara ncelik verilerek, ilgili amalara kar gelen hedeflere de bir ncelik sras verilmi olur.
Modelde, hedefler ncelik deerlerine gre sralanr. Ardndan, birinci ncelikli hedeften balanarak,
ncelik srasyla, ilgili hedef gerekletirilmeye allr.
Amalarn arlklandrlmas varsaym: Dorusal hedef programlama modelindeki sapmalarn
nem dereceleri birbirinden farkl olabilir. Bu durumda sapmalara arlk deerleri verilebilir. Bu
arlklar, her bir sapmann dierlerine oranla greceli olarak nemini gsterir (Alp, 2008). Modelin ama
fonksiyonu, hedeflerini temsil eden sapmalarn arlklandrlm toplam haline getirilir.
Hedeflenen miktardan sapma = 22.000-20.000
= 2.000 (adet/yl)
150
durumunda en nemli hedef
, en az nemli
hedef ise
ile gsterilmektedir.
Hedef Programlamann nemli zelliklerinden birbiri de hedeflerin
nemine gre ncelik atamasnn yaplabilmesidir.
HEDEF PROGRAMLAMA VE DORUSAL PROGRAMLAMA
ARASINDAK FARKLAR
Dorusal hedef programlama ile dorusal programlama yntemleri benzer zelliklere sahip olsa da
izleyen noktalardaki farkllklara sahiptirler.
1. Dorusal programlamada ama en iyi zm elde etmek iken, dorusal hedef programlamada
ama mmkn olduunca en iyi zm elde etmektir.
2. Dorusal programlama modelinde tek bir ama eniyilenmeye allr. Dorusal hedef
programlama modelinde ise birden fazla ama iin hedef deerleri belirlenir ve bu hedeflerin
hepsi modele alnr.
3. Dorusal programlama modelindeki sistem kstlar kesinlikle salanmas gereken kat
kstlardr. Dorusal hedef programlama modelinde sistem kstlarnn yan sra hedef kstlar
yer alr. Hedef kstlar ise sapmalara izin verilen esnek kstlardr.
4. Dorusal programlama modelindeki ama fonksiyonunda karar deikenleri yer alrken, hedef
programlama modelinde ama fonksiyonunda karar deikenleri yer almaz. Hedef programlama
modelindeki ama fonksiyonu negatif ve/veya pozitif sapma deikenlerinden oluur.
5. Dorusal programlamada ama fonksiyonu enbykleme ya da enkkleme eklinde iken,
hedef programlamada ama fonksiyonu sadece enkkleme eklindedir.
DORUSAL HEDEF PROGRAMLAMA TRLER
Bilindii zere, tek amal eniyileme modellerinde sadece bir ama fonksiyonunun enbyklenmesi ya da
enkklenmesi sz konusudur. Hedef programlamada ise, karar vericilere bal olarak herhangi bir
ncelii ya da arl olmayan ya da belirli bir neme ve/veya arla sahip amalarn en iyilenmesine
allmaktadr. Dolaysyla, gelitirilen ama fonksiyonunun yapsna gre hedef programlama trleri be
balkta snflandrlabilir:
1. Tek hedefli programlama
2. Eit arlkl ok hedefli programlama
3. Arlkl ok hedefli programlama
4. ncelikli ok hedefli programlama
5. ncelikli-arlkl ok hedefli programlama.
Tek Hedefli Programlama
Ele alnan problemin tek bir hedefi olmas durumunda ortaya kan programlama trdr. Hedef trne
bal olarak, ama fonksiyonu farkl biimde kurulur:
1.
2.
3.
151
rnek 7.1. Bir mini buzdolab retici firmasnn bnyesinde sevkiyat iin tr ara bulunmaktadr.
Ylda en fazla 1 milyon adet mini buzdolab retimi yaplmaktadr. A tr ara ile bir seferde 200, B tr
ara ile 250 ve C tr ara ile 400 adet buzdolab sevkiyat yaplabilmektedir. Aralarn yllk kullanm
sonucu oluan bakm maliyetleri A tr ara iin 200, B tr ara iin 300 ve C tr ara iin de 500 lira
olmaktadr. Firma bakm maliyetleri iin en ok 900.000 lira denmesini istemektedir.
Bu rnekte firmann bakm maliyetlerine ilikin olmak zere tek bir hedefi bulunmaktadr. Hangi ara
trnden ne kadar kullanlacan belirleyecek tek hedefli programlama modeli izleyen ekilde
kurulabilir.
bir ylda kullanlan tr ara adedi
: A tr ara; : B tr ara; : C tr ara
: Yllk 900000 lira bakm maliyetleri hedefinin altnda kalan miktar
: Yllk 900000 lira bakm maliyetleri hedefini aan miktar
Maliyet hedefi kst:
Sevkiyat kst:
Negatif olmama kst:
kstlar altnda
Kurulan modelden grld zere, maliyet hedefi kst maliyet fonksiyonunun pozitif ve negatif
sapma deikenlerinin eklenmesi ve hedef deeri olan 900.000e eitlenmesi ile oluturulmutur. Ama
fonksiyonu da maliyet hedefi almak istenmediinden, sadece pozitif sapmann enkklenemesi
eklinde oluturulmutur.
Eit Arlkl ok Hedefli Programlama
Ele alnan problemin hedeflerinin herhangi bir nceliinin bulunmamas ve sapma deikenlerinin de eit
nemli olmas halinde ortaya kan programlama trdr. Ama fonksiyonu da istenmeyen sapma
deikenlerinin toplam eklinde kurulur.
rnein istenmeyen sama deikenleri
olsun. Bu durumda ama fonksiyonu
izleyen ekilde kurulur.
Sapma deikenlerine ilikin verilen rnekte de retim ve stok miktarlar hedefleri iin meydana
gelebilecek sapmalar eit arla sahip olduundan, ama fonksiyonunda istenmeyen sapmalarn toplam
en kklenir (
). Burada her iki sapma deikenin ayn boyutta (adet) olduuna dikkat
edilmelidir. Eit arlkl ok hedefli programlama modellerinde ama fonksiyonu deerinin anlaml
olabilmesi iin sapma deikenlerinin ayn boyutta/birimde olmas gerekmektedir.
Arlkl ok Hedefli Programlama
Hedeflerdeki sapma deikenlerinin nem derecelerinin birbirinden farkl olmas halinde sapma
deikenlerine
arlk deerleri verilebilir. Bu arlklar, her bir sapma deikeninin dierine oranla
greceli olarak nemini gsterir. Ama fonksiyonu, sapma deikenlerinin arlklandrlm toplamnn
enkklenmesi eklinde oluturulur.
Bu yaklam genellikle eit arlkl ok hedefli problemlerin sapma deikenlerinin boyutlar/l
birimleri farkl olduunda tercih edilir.
152
rnein, ama fonksiyou
olarak belirlenen bir hedef programlama modelinde
hedeflerden ilki kr dieri de retim hedefi olsun. Bu durumda
sapma deikeninin l birimi lira,
sapma deikeninin l birimi de adet cinsindendir.
Her hedefe kar gelen sapma deikeni sre, para birimi ve adet gibi farkl leklerde olduunda,
ama fonksiyonunda normalletirme ve benzeri ilemler yaplabilir. Karmak bir sre olan arlk
belirleme konusuna bu blmde yer verilmemitir.
Konuyla ilgili olarak yeniden
ama fonksiyonu ele alnacak olursa, birinci sapma
deikeninin ikinci sapma deikenine gre greceli olarak 4 kat daha nemli olduunu varsayalm. Bu
durumda daha anlaml hale gelen ama fonksiyonu,
ve
olmak zere izleyen ekilde
kurulur.
Sapma deikenlerine arlk verilmesi durumu bir hedef iin negatif ve pozitif sapma deikenlerinin
birbirine gre nemli olmas durumunda da gerekleebilir. rnein eitlik trnde bir retim hedefinde,
hedefin altnda kalmaya neden olan negatif sapma, retim hedefini aan pozitif sapmadan daha nemli
olabilir. Bu durumda negatif sapma pozitif sapmaya gre 3 kat daha nemli olsun. lgili ama fonksiyonu
da bu durumda
olacaktr. Byk arla sahip negatif sapma (
), pozitif sapmaya (
gre daha fazla
istenmemektedir. Ama fonksiyonu bir en kkleme fonksiyonu olduundan, bu durumda arl daha
byk olan negatif sapma ncelikli olarak enkklenmeye zorlanmaktadr.
ncelikli ok Hedefli Programlama
Bir hedefe ulamak dier hedeflere ulamaktan daha nemli olabilir. Dolaysyla, ncelikli hedef
programlamada karar verici hedeflere bir ncelik belirler ve bu nceliklere gre hedefleri sralandrr.
Buradaki temel fikir, ilk ncelikli hedef ve/veya hedeflerin sonraki ncelik seviyesindeki hedef ve/veya
hedeflerden nce gerekletirilmesidir. Arlkl ok hedefli programlamadan farkl olarak, yksek
ncelikli hedefin en iyi deerinin dk ncelikli hedef tarafndan ktletirilmesine izin verilmeyecek
ekilde her seferinde bir hedef en iyi klnr (Taha, 2000).
ncelikli ok hedefli programlamada, toplam k adet ncelik belirlenmesi halinde, birinci ncelikli
hedef ncelii
ve en dk hedef ncelii
olmak zere, dier hedef ncelikleri
eklinde sralanr. Her bir ncelik seviyesinde birden fazla hedef bulunabilir. Bu durumda, ayn ncelik
seviyesine sahip hedef grubunda yer alan hedefler eit arlkl ya da arlkl hedef programlamadaki gibi
modellenebilir. zm aamasnda ise farkl nceliklere sahip hedefler nem derecesine gre sralanr.
Bu konuda daha detayl bilgi edinmek isteyenler ztrk, A. (2011).
Yneylem Aratrmasna Giri, Bursa: Ekin Yaynevi ve Cinemre, N. (2011). Yneylem
Aratrmas, Evrim Yaynevi: stanbul kitaplarn inceleyebilirler.
rnek 7.2. Bir iletme ynetimi lojistik faaliyetlerine ilikin belirledikleri be hedef iin ncelik
seviyesi atamtr. Buna gre istenmeyen sapma deikenleri ve ilgili ncelik seviyeleri Tablo 7.1de
verilmitir.
Tablo 7.1: rnek Probleme likin Veriler
ncelik Seviyesi Hedef no stenmeyen sapma deikenleri
2, 3
4, 5
Genel olarak ama fonksiyonu
olarak ifade edilir.
153
ncelikli-Arlkl ok Hedefli Programlama
ncelikli hedef programlama modellerinde baz durumlarda sapma deikenlerinin farkl arlklara sahip
olduu durumlar da karmza kabilmektedir.
rnein bir iletmenin ncelikli farkl amac olsun.
Birinci ncelikli birinci hedef iin hem negatif hem de pozitif sapma deikenleri istenmeyen
deikenlerdir.
Birinci hedef iin negatif sapma pozitif sapmadan iki kat nemlidir.
kinci hedef ikinci, nc hedef de nc ncelikli hedef olarak belirlenmitir.
kinci ve nc hedefler iin pozitif sapma deikenleri istenmeyen deikenlerdir.
Bu durumda ilgili problem iin ama fonksiyonu aadaki ekilde kurulur.
Bu konuda daha detayl bilgi edinmek isteyenler ztrk, A. (2011).
Yneylem Aratrmasna Giri, Bursa: Ekin Yaynevi ve Cinemre, N. (2011). Yneylem
Aratrmas, Evrim Yaynevi: stanbul kitaplarn inceleyebilirler.
DORUSAL HEDEF PROGRAMLAMADA KARAR MODELNN
OLUTURULMASI
Dorusal programlamadan farkl olarak, dorusal hedef programlamada belirlenen ama ve hedefler
dorultusunda hedef kstlar oluturulur. Buna ilaveten, ama fonksiyonu da sadece hedeften sapmalar
gsteren sapma deikenlerinden oluur.
Bu blmde, genel dorusal hedef programlama karar modelinin oluturulmasna gemeden nce,
ncelikle hedef kstlarnn ve ama fonksiyonun nasl oluturulduu anlatlacaktr.
Hedef Kstlarnn Oluturulmas
Hedef kstlar, belirlenen hedef trne bal olarak oluturulur. Hedef programlamada tr hedef vardr
(ztrk, 2011). Bu hedefler;
1. Altna dmek istenmeyen alt snr belirleyen tek tarafl hedef (bu snr amak baardr).
2. stne kmak istenmeyen st snr belirleyen tek tarafl hedef (bu snrn altna dmek
baardr).
3. Her iki tarafta da bir kayp istenmediinde belirlenen spesifik hedef (ama fonksiyonu bu
hedefin altnda veya stnde deer alrsa bu bir baarszlktr). Bu hedef tam olarak
salanmaldr.
Bu hedef trlerine ilaveten, baz durumlarda hedefler bir aralk iinde de belirlenebilir. rnein, yllk
retim miktarnn en az 20000 en ok da 40000 adet olmas gibi.
hedef fonksiyonu ve
birinci ama iin belirlenen hedef olmak zere yukarda tariflenen
hedef trleri izleyen eitsizlikler halinde yazlr.
Bir ama iin alt snr hedef belirlendiinde, altna dmek istenmeyen tek tarafl hedef (1) nolu
eitsizlik ile gsterilir.
(1)
Bir ama iin st snr hedef belirlendiinde, stne kmak istenmeyen tek tarafl hedef (2) nolu
eitsizlik ile gsterilir.
(2)
154
Bir ama iin eitlik eklinde bir hedef belirlendiinde, hedef (3) nolu eitlik ile gsterilir.
(3)
Belirlenmi olan her bir hedef kst, sapmalara izin verildii iin, kstlarn ihlal edilebildii esnek
hedefe (4) nolu eitlik halinde dntrlr.
(1) durumunda, karar verici iin
hedefinden byk olan tm deerler kabul edilebilir deerlerdir.
Dolaysyla,
hedefinin altna dlmesine sebep olacak negatif sapma deikenlerinin mmkn
olduunca sfr olmas gerekir.
(2) durumunda, karar verici iin
hedefinden kk olan tm deerler kabul edilebilir deerlerdir.
Dolaysyla,
hedefinin stne klmasna sebep olacak pozitif sapma deikenlerinin mmkn
olduunca sfr olmas gerekir.
(3) durumunda ise karar verici iin
hedefi tam olarak karlanmaldr. Dolaysyla,
hedefinin
altna dlmesine sebep olacak negatif sapma deikenleri ile hedefin stne klmasna sebep olacak
pozitif sapma deikenlerinin mmkn olduunca sfr olmas gerekir.
Bir hedefin ya altnda ya da stnde bir durum gerekletiinde sapma deikenlerinden biri daima
sfr deerini alr. Hedefin tam olarak gereklemesi durumunda ise iki sapma deikeni de sfr deerini
alr.
Ama fonksiyonunun en iyi deeri, sistem ve hedef kstlarnn snrlandrd zm alan iinde
aranr. Burada unutulmamas gereken nokta, sistem kstlar salanmadan hedef kstlarnn salanmasna
geilmeyeceidir. Sistem kstlarnn uygun bir zm oluturmamas durumunda ise hedef kstlarna
(ama fonksiyonuna) baklmakszn problemin uygun bir zm olmad belirlenmi olur.
olmak zere, sistem kstlar
ve
olan bir problemde hedef kst
ve istenmeyen sapma deikeni de
olarak belirlenmitir. Bu durumda problemin uygun zm hakknda ne dersiniz?
rnek 7.3. Sistem kstlarnn
olduu bir problemde, hedef kst
ve istenmeyen sapma deikeni de
olsun.
Sistem kstlar tarafndan salanan uygun zm alan ABCDE yamuu ile ekil 7.1de gsterilmitir.
hedef fonksiyonu uygun zm alannn dnda kalmtr. Hedef kstlar esnek kstlar
olduundan,
ve
sapma deikenleri deer alarak hedef kst uygun zm alannda bir nokta ile
kesiebilir. Hedef kstnn uygun zm alanna yaklaabilmesi iin
sapma deikeni sfr deerini
alacaktr.
deikeni de pozitif bir deer alarak, hedef kstnn uygun zm alannda bir noktada
deer almasn salayacaktr. Problemin en iyi zm
deerini ald A noktasndadr. Bylece
hedef kst olabildiince salanm ve
en az 90 yerine 80 deerini alarak mmkn olan en iyi deeri
almtr. Bu durumda
deikeninin deeri de 10 olmutur.
Birinci hedef kst:
(4)
kinci hedef kst:
nc hedef kst:
155
ekil 7.1: rnek 7.1 in Uygun zm Alan ve Hedef Kstnn Grafik zerinde Gsterimi
Bir hedeften ayn anda hem pozitif hem de negatif ynde sapma olamayacandan
ve
ayn anda
sfrdan byk deer alamaz. Sapma deikenlerinden en az biri sfr deerini alacaktr.
Hedef kstlarnn gerekletirilmesine allmadan nce, mutlaka
tm sistem kstlar salanmaldr.
Tablo 7.2de farkl hedeflere ilikin oluturulan hedef kstlar verilmitir.
Tablo 7.2: Hedef Trlerine Bal Olarak Oluturulan Hedef Kstlar
Hedef Tr Hedef Kst Ama fonksiyonunda en
kklenecek sapma
deikeni
stne kmak istenmeyen st snr
belirleyen tek tarafl hedef:
Altna dmek istenmeyen alt snr
belirleyen tek tarafl hedef:
Her iki tarafta karmak istemediimiz
spesifik hedef:
)
Hedef kstnn oluturulmas ve sapma deikeni deerlerinin hesaplanmasna ynelik bir rnek
izleyen ekilde verilebilir.
156
rnek 7.4. Bir otomobil firmasnda yllk retim miktar en az 20.000 adet olmal hedefine karlk
yllk retim miktar 18.000 adet olarak gereklemitir. Dolaysyla, istenilen hedefe ulalamamtr. Bu
durumda hedefe ulamada ortaya kan sapmay belirleyecek olursak, ncelikle hedef kstn
oluturmamz gerekmektedir. Karar ve sapma deikenleri izleyen ekilde belirlenir.
Otomobil retim miktar (adet/yl)
: yllk 20.000 adet retim hedefinin altnda kalan miktar
: yllk 20.000 adet retim hedefini aan miktar
Bu rnek iin hedef fonksiyonu eklindedir. Eitsizliin sa taraf sabiti olan 20.000,
istenen hedef yani en dk yllk retim miktardr.
Hedeften sapmalara izin verildii iin, bu durumda hedef kst aadaki eitlik halinde yazlr.
=18000 (auetyil)olarak belirlendiinden, hedeflenen retim miktarna ulalamamtr.
Dolaysyla, hedef am gereklememi ve pozitif sapma deikeni
=0 olmutur. stenilen hedefe
ulalamadndan da negatif sapma deikeni
= 2000
olmutur.
Bu rnekte, yllk emniyet stoku miktarnn 3000 adet olmas eklinde bir hedef daha
belirlenmi olsun. Probleme dair yeni deikenler,
emniyet stoku miktar (adet/yl)
: yllk 3000 adet emniyet stoku hedefinin altnda kalan miktar
: yllk 3000 adet emniyet stoku hedefini aan miktar
olarak belirlendiinde, ikinci hedef fonksiyonu
ve hedef kst da
eklinde olacaktr. Yllk emniyet stoku miktarnn 3000 adet olarak gereklemesi durumunda her ki
sapma deikeni (
ve
) sfr deerini alacak ve hedefe tam olarak ulalm olunacaktr.
Aksi durumlarda ise, ya hedefin altnda ya da hedefin stnde bir baarszlk gerekleecektir.
farkl model kamyon kullanan bir lojistik firmas ayda toplam 100
sefer yapmaktadr. Birinci tr kamyonun ayda en fazla 20 defa kullanlmasn ve ikinci tr
kamyonun da ayda en az 40 defa kullanlmasn hedefleyen firmann hedeflerinden
istenmeyen sapmalar hangileridir?
Ama Fonksiyonunun Oluturulmas
Dorusal hedef programlama modelinde ama fonksiyonu sadece sapma deikenlerinden
olumaktadr. Hedeften istenmeyen yndeki sapma deikenleri toplam en kklenir. Ama
fonksiyonunda yer alacak sapma deikenleri de modelde yer alan hedef trlerine bal olarak belirlenir.
157
Tablo 7.2de verildii zere,
Hedef tr ynnde ise, ama fonksiyonunda hedefin almasna sebep olan pozitif sapma
deikeni en kklenmeye allacaktr.
Hedef tr ynnde ise, ama fonksiyonunda hedefe ulamay engelleyen negatif sapma
deikeni en kklenmeye allacaktr.
Hedef tr eitlik eklinde ise, ama fonksiyonunda hedefe tam olarak ulalmasn engelleyen
hem
hem de
deikenleri enkklenmeye allacaktr.
Karar vericilerin hedeflere ncelik ve/veya arlk vermesi durumunda da bu ncelik ve arlklar ile
ama fonksiyonu oluturulur. zleyen rneklerde farkl durumlar iin ama fonksiyonlarnn nasl
oluturulduu ele alnmtr.
Dorusal hedef programlama modelinde ama fonksiyonu sadece
sapma deikenlerinden olumaktadr. Ama fonksiyonunda karar deikenleri yer
almaz.
rnek 7.5. Bir nceki rnekten devam edecek olursak, ilk hedef yllk retim miktarnn en az 20.000
olmas ve ikinci hedef de yllk emniyet stoku miktarnn 3000 adet olmas eklinde belirlenmiti.
Hedefler iin herhangi bir ncelik ve arlk verilmemesi durumunda ama fonksiyonu istenmeyen
sapmalarn toplamnn enkklenmesi eklinde oluturulur.
lk hedef iin istenmeyen sapma :
kinci hedef iin istenmeyen sapmalar :
ve
Ama fonksiyonu :
Grld zere, ilk hedef iin hedefin altnda kalnmak istenmediinden sadece negatif sapma
deikeni, ikinci hedefin de tam olarak karlanmas istendiinden her iki sapma deikeni de en
kklenmeye allmtr.
Ama fonksiyonunda yer alacak sapma deikenleri hedef trne
baldr.
rnek 7.6. Bir iletme nmzdeki planlama dnemi iin hedef belirlemi olsun. lk hedef retim
miktarnn en az 100.000, ikinci hedef envanter tama maliyetlerinin en fazla 3000 lira ve karn 40.000
lira olmas eklinde belirlenmitir. Hedefler iin herhangi bir ncelik ve arlk verilmemesi durumunda
ama fonksiyonu istenmeyen sapmalarn toplamnn en kklenmesi eklinde oluturulur.
lk hedef iin istenmeyen sapma :
kinci hedef iin istenmeyen sapma :
nc hedef iin istenmeyen sapmalar :
ve
Ama fonksiyonu :
Grld zere, ilk hedef iin hedefin altnda kalnmak istenmediinden sadece negatif sapma
deikeni, ikinci hedefin stne klmak istenmediinden sadece pozitif sapma deikeni ve nc
hedefin de tam olarak karlanmas istendiinden her iki sapma deikeni de en kklenmeye
allmtr.
rnek 7.7. Drdnc rnekte ele alnan problemde, irket yneticileri ikinci hedefin birinci hedeften
daha nemli olduunu dnmektedir. Bu durumda,
: yllk emniyet stokunun 3000 adet olmas hedefinin ncelii (ikinci hedef)
: yllk retim miktarnn en az 20.000 adet olmas hedefinin ncelii (ilk hedef)
ve
olmak zere, ama fonksiyonu izleyen ekilde oluturulur:
158
Aksi durumda, yani birinci hedefin birinci ncelikli hedef olmas durumunda ise ama fonksiyonu,
eklinde oluturulur.
Bu rneklerde nce birinci ncelikli (
hedef gerekletirilmeden ikinci ncelikli hedef
gerekletirilemez.
rnek 7.8. Yine drdnc rnekten devam edecek olursak, irket yneticilerinin birinci hedefin
ikinci hedeften 3 kat nemli olduunu dndn varsayalm. Bu durumda, ama fonksiyonu izleyen
ekilde oluturulur.
rnek 7.8te incelenen sistemde ikinci hedefin birinci hedeften 4 kat
daha fazla olmas durumunda ama fonksiyonu ne olacaktr?
Modelleme
Dorusal hedef programlama modelinin kuruluunda izleyen admlar srasyla uygulanr:
1. Karar deikenlerinin (
belirlenmesi.
2. Sistem kstlarnn belirlenmesi.
3. Belirlenen hedefler dorultusunda hedef kstlarnn belirlenmesi.
4. Modelde yer alan tm deikenler iin negatif olmama kstnn oluturulmas.
5. Karar vericilere bal olarak gerekli durumlarda hedeflerin nceliklerinin belirlenmesi.
6. Karar vericilere bal olarak gerekli durumlarda hedeflerin arlklarnn belirlenmesi.
7. Ama fonksiyonunun oluturulmas.
Hedef ve sapma deikenlerinin herhangi bir ncelii ve arl olmamas durumunda, toplam i hedef
ve j karar deikeni iin genel dorusal hedef programlama modeli izleyen (5) nolu model ile verilmitir.
Hedef kstlar
Sistem kstlar
kstlar altnda
(5)
rnek 7.9. ikolata retimi yapan bir firma, gelecek retim dneminde ekerleme retimine gemeyi
planlamaktadr. retmeyi planlad iki tr ekerleme de eker, fndk ve ikolata iermektedir. Firmann
mevcut gnlk stoklarnda 200 kg eker, 40 kg fndk ve 60 kg da ikolata bulunmaktadr. A tr
ekerleme %15 fndk ve % 15 ikolata iermelidir. B tr ekerleme de en az %20 fndk iermektedir. A
tr ekerlemenin kilosu 50 kurua (0.2 lira), B tr ekerlemenin kilosu da 20 kurua (0.5 lira)
satlmaktadr. Firma gnlk karnn en az 1000 lira olmasn hedeflemektedir. Yan sra, A tr
ekerlemeden de gnde en ok 3 ton retilmesini hedeflemitir.
Bu problemin dorusal hedef programlama modelinin kurulmasndan nce karar ve sapma
deikenleri izleyen ekilde tanmlanabilir.
159
tr malzemeden j. tr ekerlemede kullanlan miktar (kg)
: eker; : fndk; : ikolata
: A tr ekerleme ; : B tr ekerleme
: gnlk 1000 lira kr hedefinin altnda kalan miktar
: gnlk 1000 lira kr hedefini aan miktar
: gnlk 3 ton A tr ekerleme retim hedefinin altnda kalan miktar.
: gnlk 3 ton A tr ekerleme retim hedefini aan miktar
Model:
Kr hedefi kst:
retim hedefi kst:
eker kst:
Fndk kst:
ikolata kst:
A tr ekerlemede fndk kst:
A tr ekerlemede ikolata kst:
B tr ekerlemede fndk kst:
Negatif olmama kst:
kstlar altnda
Kr ve retim hedeflerine ilikin hedefler modelde hedef kstlar olarak yer almtr. Ama
fonksiyonunda ise kr hedefinin altnda kalnmak istenmediinden
deikeni, retim hedefinin de
altnda kalnmak istenmediinden
deikeni toplamlar enkklenmektedir.
Hedeflerin ve sapmalarn nceliklerinin olduu durumlara ilikin rnek aada verilmitir.
rnek 7.10. ki amal bir hedef programlama modelinde, birinci hedef ilk hedef kk eitlik ()
ynndedir. kinci hedef ise eitlik halinde tam olarak salanmas istenen bir hedeftir. kinci hedef iin
pozitif sapma deikeni de negatif sapma deikeninden 3 kat daha nemlidir. Ayn zamanda, birinci
hedefin ikinci hedeften iki kat daha nemli olduu saptanmtr. Bu koullar altnda ama fonksiyonu
izleyen ekilde kurulur:
rnek 7.11. amal bir hedef programlama modelinde, ilk hedef birinci ncelikli, nc hedef
ikinci ncelikli ve ikinci hedef de nc ncelikli olsun. Ayn zamanda, birinci hedefe ilikin
sapmalardan pozitif sapma negatif sapmadan da iki kat nemli olsun. Dier hedeflerde de negatif sapma
istenmeyen sapma olarak belirlensin. Bu durumda ama fonksiyonu izleyen ekilde kurulur:
160
rnek 7.12. Aada ok amal bir probleme ilikin hedef ve sistem kstlar verilmitir:
Hedefler Sistem kstlar:
Hedef 1:
Hedef 2:
Hedef 3:
Hedeflerin ncelik sralamas 1-2-3 ve sapma deikenlerinin eit arlkl olmas durumunda,
yukarda verilen problemin ncelikli hedef programlama modeli izleyen ekilde kurulur.
(1.Hedef kst)
(2.Hedef kst)
(3.Hedef kst)
kstlar altnda
Kurulan modelden de grld zere, hedef kstlar hedef fonksiyonlarna pozitif ve negatif sapma
deikenlerinin eklenmesi ile oluturulmutur. Birinci hedef kk eitlik ynnde olduundan
istenmeyen sapma deikeni
, ikinci hedef byk eitlik ynnden olduundan istenmeyen sapma
deikeni
dir. nc hedef bir eitlik olduundan hem pozitif hem de negatif sapma deikenleri
istenmeyen deikenlerdir. Ama fonksiyonu da herbir hedeften istenmeyen sapmalarn ncelikleri ile
birlikte toplamnn enkklenmesi eklinde oluturulmutur.
rnek 7.13. Organik tarma gei srecini tamamlayan bir ifti hangi rnleri retecei konusunda
karar aamasna gelmitir. Yapt aratrmalar sonucunda arazisinin bir ksmna patates bir ksmna da
buday ekmeye karar vermitir. Bir dnm araziye patates ekilmesi durumunda 100 kilo, buday
ekilmesi durumunda da 250 kg. rn edilmektedir. Bir dnm arazide patates ekimi iin haftalk 10 saat,
buday ekimi iin de 4 saat iilik gerekmektedir. Patatesin kilosu 3, budayn kilosu da 4 liradan
satlmaktadr. iftinin toplam arazisi 7 dnm ve haftalk toplam uygun iilik saati de 40
(saat/hafta)tr. iftinin birinci ncelikli hedefi toplam gelirinin en az 3000 lira olmas, ikinci ncelikli
hedefi de en fazla 300 kilo patates retmektedir. Belirlenen hedeflere ulamak iin kurulan ncelikli
hedef programlama modeli izleyen ekilde kurulabilir.
patates ekilen dnm miktar
buday ekilen dnm miktar
: yllk 900.000 lira gelir hedefinin altnda kalan miktar
: yllk 900.000 lira gelir hedefini aan miktar
: yllk 300 kg. patates retim hedefinin altnda kalan miktar
: yllk 300 kg. patates retim hedefini aan miktar
161
Gelir hedefi kst:
Patates retim hedefi kst
Sistem kstlar
Negatif olmama kstlar
kstlar altnda
Bu modelde de hedef kstlar hedef fonksiyonlarna pozitif ve negatif sapma deikenlerinin
eklenmesi ile oluturulmutur. Birinci hedef byk eitlik ynnde olduundan istenmeyen sapma
deikeni
, ikinci hedef de byk eitlik ynnden olduundan istenmeyen sapma deikeni
dir.
Ama fonksiyonu da herbir hedeften istenmeyen sapmalarn ncelikleri ile birlikte toplamnn
enkklenmesi eklinde oluturulmutur.
Modellin zmnn ilk aamasnda birinci hedef iin negatif sapma deikenin en kklenmesine
allacaktr. kinci aamada da birinci ncelikli hedefi salayacak ekilde ikinci ncelikli hedefin en
iyilenmesine allacaktr.
HEDEF PROGRAMLAMADA ZM YAKLAIMLARI
Dorusal hedef programlama problemlerinin zmnde kullanlan iki tr yaklam bulunmaktadr:
Grafik yntemi ve Simpleks yntemi. Bu ders kapsamna uygun olarak Simpleks zm yaklamna
ntemizde yer verilmemitir.
Grafik Yntemi
Grafik yntemi, modeldeki karar deikeni says iki olduunda tercih edilen bir yntemdir. zm
aamasnda ncelikle problemin modeli kurulur. Ardndan tm kst (sistem ve hedef) denklemleri grafik
zerinde izilir. Yalnz, hedef kstlarn grafik zerinde gsterirken sapma deikenlerinin sfr olduu
varsaylr. rnein bir hedef kst
olsun. Bu durumda hedef kstnn grafik
zerinde izimi,
denklemi eklinde yaplr.
Hedef kstlar, sistem kstlarnn oluturduu uygun zm alann dnda deer alamazlar. Bu
nedenle, ncelikle hedef kstnn sapma ynleri belirlenir. stenmeyen sapma en kk olacak ekilde
hedeflerin istenilen ynlerini kapsayan alan ile uygun zm alannn kesiip kesimedii kontrol edilir.
Kesime varsa kesiim noktalarndan hangisi istenmeyen sapmay en kklyorsa o nokta en iyi zm
vermektedir.
Hedeflerin istenilen ynlerini kapsayan alan ile sistem kstlarnn salad uygun zm alan
kesimiyorsa, hedef kstlar uygun zm alannn dnda kalmayacak ekilde, uygun zm alanna
doru ynlendirilirler. Bu ilemin doal bir sonucu olarak da sapma deikenleri deer alrlar.
Grafik yntemin son aamasnda, uygun zm alan ile hedef kstlarnn kesiim noktalarnda
istenmeyen sapma deikenlerinin ald deerler belirlenir. stenmeyen sapma deikenlerinin
toplamnn en kk deer ald nokta problemin en uygun zm noktasdr.
Hedef kstlar, sistem kstlarnn oluturduu uygun zm alann
dnda deer alamazlar.
Bu blmde incelenen grafiksel zm yaklam ile zm rneklerinde hedeflerin nceliksiz ve
sapma deikenlerinin de eit arlkl olduu varsaylmtr.
rnek 7.14. Tek hedefli bir problemin ele alnd rnek 7.3te, hedef kst
ve
istenmeyen sapma deikeni de
olarak belirlenmiti. Sistem kstlar tarafndan salanan uygun zm
alan olan ABCDE yamuu ile hedef kst ekil 7.2de yeniden verilmitir.
162
hedefi ynndedir. Bu durumda hedef kst
olacaktr.
Ancak uygun zm alan ile hedefin istenen yn kesimemektedir. Dolaysyla hedef kstn uygun
zm alanna ynlendirmek zere
=0 olacak ve
deikeninin alaca deer de en kklenmeye
allacaktr. Bylece, hedef deere mmkn olduunca ulalmaya allacaktr.
ekil 7.2: Problemin Uygun zm Alan ve Hedef Kstnn Grafik zerinde Gsterimi
Uygun zm alannn ke noktalar, (
) deerleri hedef kstlarnda yerine konarak elde edilen
sapma deikeni deerleri ve ama fonksiyonun ald deerler Tablo 7.3te verilmitir. Tablodan
grld zere, her bir nokta iin olduundan problem iin en iyi zm bulunamamtr. En
uygun zm noktas, negatif sapma deikeninin en kk deeri ald A(0, 80) noktasdr. Ama
fonksiyonu deeri de 10 olarak belirlenmitir.
Tablo 7.3: Uygun Ke Noktalarna Gre Ama Fonksiyonu Deerleri
Uygun ke noktas
(
)
Sapma deikenleri Ama fonksiyonu deeri
A(0,80)
)
10
B(20,60)
)
30
C(40,20)
)
70
D(40,0)
)
90
E(0,0)
)
90
En uygun
deer
163
rnek 7.15. rnek 7.14te tek hedefli bir hedef programlama probleminin grafik yntemle zm
aratrlmtr. Bu rnekte ise eit arlkl iki hedefli bir problemin zm grafik yntemle
aratrlacaktr. Problemin hedef programlama modeli aada verilmitir.
Hedef kst 1:
Hedef kst 2:
kstlar altnda
ekil 7.3ten de grld zere, her iki hedef kst da sistem kstlar tarafndan salanan uygun
zm alan iinde yer almaktadr. Birinci hedeften istenmeyen sapma deikeni
olduundan birinci
hedef kk eitlik ynnde; ikinci hedeften istenmeyen sapma
olduundan ikinci hedef byk eitlik
ynndedir.
Birinci hedef fonksiyonunun
ve ikinci hedef fonksiyonunun da
olmas
nedeniyle, problemin en uygun zm deeri OAB geninde aranacaktr. Uygun zm alannn ke
noktalar, (
) deerleri hedef kstlarnda yerine konarak elde edilen sapma deikeni deerleri ve
ama fonksiyonun ald deerler Tablo 7.4te verilmitir.
ekil 7.3: rnek 7.12 Probleminin Grafiksel Gsterimi
164
Tablo 7.4: Uygun Ke Noktalarna Gre Ama Fonksiyonu Deerleri
Uygun ke
noktas
(
)
Sapma deikenleri Ama fonksiyonu deeri
O(0,2)
)
0
B(1.33,2)
)
0.02
A(0,3)
)
0
Tablo 7.4ten grld zere problem iin en uygun zm noktas, ama fonksiyonu deerlerinin
toplamnn en kk deeri ald hem O(0,2) hem de A(0,3) noktasdr. Her iki noktada da ama
fonksiyonu deeri 0 olarak belirlenmitir. Bu durumda diyebiliriz ki, problem iin en iyi sonu (enk z=0)
iki farkl noktada elde edilmitir. Dolaysyla problem iin birden fazla en iyi zm veren nokta
bulunmaktadr.
165
zet
Gerek hayatta karlatmz birok problem
birden fazla amac eniyilemeye yneliktir. Bu
ok amal karar verme problemlerinin
zmnde dorusal programlama yntemleri
yetersiz kalmaktadr. Hedef Programlama, ok
amal probelmlerin zmnde sklkla
kullanlan yntemlerden biri olarak karmza
kmaktadr.
Kst yaplarna bal olarak bu nitede dorusal
hedef programlama yntemi ele alnmtr.
Dorusal programlamadan farkl olarak, hedef
programlama problemlerinin modellenebilmesi
iin hedef, sapma deikenleri, hedef kstlar,
ama ncelikleri ve arlklar kavramlarnn
bilinmesi gerekmektedir.
Hedef programlama modellerinde ama
fonksiyonunda karar deikenleri yer almazlar.
Ama fonksiyonu, belirlenen hedeflerden
istenmeyen ynde oluan sapmalarn toplamnn
en kklenmesi eklinde kurulur. Hedef trne
bal olarak ama fonksiyonunda en
kklenmesi gereken sapma deikenleri
tabloda verilmitir.
Hedef Tr Hedef Kst stenmeyen
Sapma
Deikeni
)
Baz durumlarda karar vericiler, ele aldklar
problemdeki her bir amaca ya da ama grubuna
bir ncelik verebilir. Yan sra, modeldeki
sapmalarn nem dereceleri de birbirinden farkl
olabilir. Bu durumda her bir sapmann dierlerine
oranla greceli olarak nemini gsteren arlk
deerleri verilebilir.
Dorusal hedef programlama modellerinde
kurulan ama fonksiyonuna bal olarak be
farkl hedef programlama modelinden
bahsedebiliriz. Ele alnan problemin tek bir
hedefi olmas durumunda ortaya kan
programlama tr, tek hedefli programlamadr.
Sadece, belirlenen hedeften istenmeyen yndeki
sapma(lar) en kklenir.
Ele alnan problemde birden fazla hedef
eniyilenmeye allyorsa ve hedef ile sapma
deikenlerinin herhangi bir nceliinin
bulunmamas halinde ortaya kan programlama
tr, eit arlkl ok hedefli programlamadr.
Ama fonksiyonu istenmeyen sapma
deikenlerinin toplam eklinde kurulur.
Hedeflerdeki sapma deikenlerinin nem
derecelerinin birbirinden farkl olmas halinde
sapma deikenlerine
arlk deerleri
verilebilir. Ama fonksiyonunun, sapma
deikenlerinin arlklandrlm toplamnn en
kklenmesi eklinde oluturulduu
programlama tr de arlkl ok hedefli
programlamadr. Sapma deikenlerinin eit
arlkl fakat hedeflerin farkl nceliklerinin
olmas durumunda da ncelikli ok hedefli
programlama tr ortaya kmaktadr.
ncelikli hedef programlama modellerinde baz
durumlarda sapma deikenlerinin farkl
arlklara sahip olduu durumlar karmza
kabilmektedir. Bu durumda ortya kan
programlama tr de ncelikli-arlkl ok
hedefli programlamadr.
Dorusal hedef programlama problemlerinin
zmnde kullanlan yntemlerden biri grafik
yntemdir. Sistem kstlar grafik zerinde
izildikten sonra bir uygun zm alan
salanyorsa, ikinci admda hedef kstlarnn
grafik zerinde izimi yaplr. Bu yntem iki
karar deikeni olan problemlerde etkin bir
ekilde kullanlmaktadr.
166
Kendimizi Snayalm
1. Hedef programlama ile ilgili ifadelerden
hangisi yanltr?
a. Sapma deikenleri modeldeki tm kstlarda
yer alr.
b. Ama fonksiyonu istenmeyen sapma
deikenlerinin toplam en kklenecek
ekilde oluturulur.
c. Hedefler, hedef kstna dntrlerek
modelde yer alrlar.
d. Modeldeki tm deikenler sfr ve/veya
sfrdan byk deer alr.
e. Hedeflere ncelik sras verilebilir.
2. Ama fonksiyonu
olarak belirlenen
ok amal bir hedef programlama problemine
ilikin bilgilerden aadakilerden hangisi
yanltr?
a. Problemin iki ncelikli hedefi vardr.
b.Birinci hedef nc hedeften daha nemlidir.
c. Birinci hedef lik ynndedir.
d. kinci hedef lik ynndedir.
e. nc hedef lik ynndedir.
3. hedefli bir problemde birinci hedef lik,
ikinci hedef =lik ve nc hedef lik
ynndedir. kinci hedefin pozitif sapma
deikeninin negatif sapma deikeninden 4 kat
daha nemli olmas durumunda, problemin ama
fonksiyonu aadakilerden hangisidir?
a.
b.
c.
d.
e.
4. Bir retim firmasnda yllk retim miktar
en az 50000 adet olmal ve yllk sipari verme
maliyetleri en fazla 2000 lira olmal hedeflerine
karlk yllk retim miktar 53000 adet ve
sipari verme maliyetleri 2100 lira olarak
gereklemitir. Bu durumda her iki hedefe
ynelik gerekleen sapma deikeni deerleri
aadakilerden hangisidir?
a.
b.
c.
d.
e.
5. Bir iletme aylk retim dnemine ilikin
hedef belirlemitir. Bu hedefler srasyla, en fazla
300 saat iilik kullanlmas, bakm giderleri iin
tam olarak 1000 lira denmesi ve aylk karn en
az 6000 lira olmas eklindedir. Hedefler iin
herhangi bir ncelik ve arlk verilmemesi
durumunda, firmann hedef programlama
probleminde oluturulan ama fonksiyonu
aadakilerden hangisidir?
a.
b.
c.
d.
e.
6. Beinci soruda ele alnan problemin ilk iki
amac eit nemde ve nc amac da dier
amalardan daha nemli olmas durumunda
oluturulacak ama fonksiyonu aadakilerden
hangisidir?
a.
b.
c.
d.
e.
167
7. Matematiksel modeli izleyen ekilde verilen
bir hedef programlama problemi iin
aadakilerden hangisi dorudur?
kstlar altnda
a. Modele ait drt sistem kst vardr.
b. Birinci hedef kk eitlik ynndedir.
c. Birinci hedef byk eitlik ynndedir.
d. kinci hedef byk eitlik ynndedir.
e. Her iki hedef de tam olarak salanmak
istenmektedir.
8. Yedinci soruda ele alnan problemde, karar
vericiler ikinci hedefin birinci hedeften 5 kat
daha nemli olduunu dndne gre yeni
ama fonksiyonu aadakilerden hangisi
olacaktr?
a.
b.
c.
d.
e.
9. Hedef fonksiyonu
olan bir
problemin grafii ekilde verilmitir. Buna gre
aadakilerden hangisi yanltr?
a. Hedef kst uygun zm alan iindedir.
b. A(0,80) noktasnda negatif sapma deeri
sfrdr.
c. B(20,60) noktasnda negatif sapma deeri
20dir.
d. C(40,20) noktasnda pozitif sapma deeri
20dir.
e. D(40,20) noktasnda hedef tam olarak
salanmaktadr.
10. Matematiksel modeli aada verilen bir
hedef programlama problemi iin aadakilerden
hangisi yanltr?
kstlar altnda
a. Problemin iki amac vardr.
b. Modele ait sistem kst vardr.
c. Birinci hedef byk eitlik ynndedir.
d. kinci hedef byk eitlik ynndedir.
e. Her iki hedef de enkklenmek istenmektedir.
168
Kendimizi Snayalm Yant
Anahtar
1. a Yantnz yanl ise Hedef Programlamada
Temel Kavramlar balkl konuyu yeniden
gzden geiriniz.
2. d Yantnz yanl ise Ama Fonksiyonunun
Oluturulmas balkl konuyu yeniden gzden
geiriniz.
3. c Yantnz yanl ise Arlkl ok Hedefli
Programlama balkl konuyu yeniden gzden
geiriniz.
4. b Yantnz yanl ise Hedef Kstlarnn
Oluturulmas balkl konuyu yeniden gzden
geiriniz.
5. c Yantnz yanl ise Ama Fonksiyonunun
Oluturulmas balkl konuyu yeniden gzden
geiriniz.
6. a Yantnz yanl ise ncelikli ok Hedefli
Programlama balkl konuyu yeniden gzden
geiriniz.
7. c Yantnz yanl ise Modelleme balkl
konuyu yeniden gzden geiriniz.
8. e Yantnz yanl ise Ama Fonksiyonunun
Oluturulmas balkl konuyu yeniden gzden
geiriniz.
9. c Yantnz yanl ise Grafik Yntemi
balkl konuyu yeniden gzden geiriniz.
10. e Yantnz yanl ise Modelleme
balkl konuyu yeniden gzden geiriniz.
Sra Sizde Yant Anahtar
Sra Sizde 1
Bir grafik zerinden de grlecei zere, system
kstlar ile uygun bir zm alan
olumamaktadr. Dolaysyla, sistemin uygun bir
zm yoktur ve hedef kstlar da
salanamamaktadr.
Sra Sizde 2
birinci tr kamyonun aylk kullanm miktar
ikinci tr kamyonun aylk kullanm miktar
nc tr kamyonun aylk kullanm miktar
olmak zere, birinci hedef fonksiyonumuz
; ikinci hedef fonksiyonumuz da
eklinde matematiksel olarak ifade edilebilir.
Birinci hedef fonksiyonumuzda hedef miktar 20
(kullanm/ay)nin almamas gerektiinden
istenmeyen sapma deikeni pozitif sapma
deikeni olan
dr. kinci hedef
fonksiyonumuzda ise hedef miktar 40
(kullanm/ay)n altna dlmek
istenmediinden istenmeyen sapma deikeni
negatif sapma deikeni olan.
Sra Sizde 3
rnek 7.4te incelenen sistemde ikinci hedefin
birinci hedeften 4 kat daha fazla olmas
durumunda ama fonksiyonu
olarak kurulur.
169
Yararlanlan Kaynaklar
Alp, S. (2008). Dorusal hedef programlama
yntemi kullanlarak kentii otobsle toplu
tama sistemi iin bir model oluturulmas ve
uygulanmas. Yaynlanmam doktora tezi.
Marmara niversitesi, Sosyal Bilimler Enstits:
stanbul.
Charnes, A. And Cooper, W.W. (1977). Goal
Programming and Multiple Objective
Optimizations, Part I, European Journal of
Operational Research, pg. 39.
Cinemre, N. (2011). Yneylem Aratrmas,
Evrim Yaynevi: stanbul.
Ignizio, J.P. (1976). Goal Programming and
Extensions, Lexington Book: London.
ztrk, A. (2011). Yneylem Aratrmasna
Giri, Bursa: Ekin Yaynevi.
Taha, A.H. (2010). Yneylem Aratrmas, 6.
Basmdan eviri, ev.:Baray, .A. ve Esnaf, .,
stanbul: Literatr Yaynclk.
Winston, W.L. (1994). Operations Research:
Applications and Algorithms, Duxbury Press:
United States of Amerika.
170
Amalarmz
Bu niteyi tamamladktan sonra;
Ulatrma ve atama problemlerinin dorusal karar modellerini kurabilecek,
Dengelenmi modeli oluturabilecek,
Ulatrma modeline bir balang temel uygun zm bulabilecek,
Ulatrma modelinde mevcut zmn eniyiliini sorgulayabilecek,
Tablo zerindeki ilemlerle ulatrma problemini zebilecek,
Atama problemlerinin zm iin Macar algoritmasn kullanabilecek
bilgi ve becerilere sahip olabilirsiniz.
Anahtar Kavramlar
Ulatrma
Ulatrma Tablosu
Dengelenmi Model
Kuzeybat Ke
Enkk Maliyet
Dng
VAM
Atlama Ta
Deiim Deeri
MODI
Atama
Macar Algoritmas
indekiler
Giri
Ulatrma Modeli
Ulatrma Modelinde Balang zm Bulma
Ulatrma Modelinde Eniyilik Snamas
Ulatrma Modelinde Yeni Temel Uygun zm
Atama Modeli
Atama Modelinin Macar Algoritmas le zm
8
171
GR
Bu nitede, dorusal programlamann zel bir tr olan ulatrma ve atama modelleri yer almaktadr.
Genel olarak rnlerin birden fazla retim noktasndan, birden fazla tketim noktasna datm ile ilgili
problemler, ulatrma veya atama problemleri (transportation or assignment problems) olarak
adlandrlr. Ulatrma modellerinin uygulamalar sadece rnlerin corafi bir merkezden corafi bir
baka noktaya tanmas ile snrl deildir. Stok kontrol, igc planlamas, kurulu yeri seimi, ilerin
makinelere datm gibi alanlarda da ulatrma modelleri kullanlabilmektedir.
Ulatrma probleminin genel hali ekil 8.1de grlmektedir. Her biri bir dm olarak gsterilen s
i
kapasitesine sahip m adet kaynak noktas ve her biri d
j
talebine sahip n adet hedef noktas vardr.
Dmleri birletiren oklar, kaynaklarla hedefler arasnda mmkn olan tama rotalarn
gstermektedir. (i, j) balants, i. kaynaktan j. hedefe rn gnderilebildii anlamna gelmekte, tama
maliyeti ve tama miktar olmak zere iki tr bilgi iermektedir. Ama, mevcut kaynaklar kullanarak
tm talebi karlayacak ekilde enkk maliyetli datm plannn bulunmasdr.
ekil 8.1: Ulatrma probleminin genel gsterimi
Atama modelinde ama, bir etkinlii eniyilemek iin kaynak kullanmnn bire bir datmn
salamaktr. Ulatrma probleminin zel bir hali olan atama problemleri ile genellikle ilerin makinelere
datm, kiilerin ilere tayini, personelin sat blgelerine datmna benzer durumlarda
karlalmaktadr.
Kaynaklar ve hedefler arasndaki mal veya hizmet ak ile ilgili olan ulatrma problemlerinde,
birden fazla hedef noktasna datm yapabilmek mmkndr. Atama problemlerinde ise, bir kaynak
noktasndan sadece bir hedefe atama yaplabilmekte ve bir hedefe sadece bir kaynak noktas
atanabilmektedir. ekil 8.1de kaynak ve hedef noktas says eit olarak kabul edilip, kaynak kapasiteleri
ve hedef talepleri 1 olarak alnrsa, ulatrma problemi atama problemine dnm olur.
Ulatrma ve
Atama Modelleri
172
Ulatrma ve atama modelleri iin, kstlarnn zel yaps nedeniyle simpleks algoritmasna gre daha
etkin zm yntemleri gelitirilmitir. zel zm algoritmalarnn olmas, dorusal programlama
modelleri arasnda ayr bir neme sahip olmalarn salamaktadr.
ULATIRMA MODEL
Ulatrma problemlerinin tad genel zellikler aadaki gibi sralanabilir:
1. Bir mal veya hizmet eklinde rn gnderen, m adet retim merkezi vardr. retim
merkezlerinin kapasiteleri bilinmektedir.
2. rnn gnderildii n adet tketim merkezi vardr. Tketim merkezlerinin talep ettikleri
miktarlar bilinmektedir.
3. Bir retim merkezinden bir tketim merkezine gnderilen her 1 birim rn iin ortaya kan
birim tama (gnderme) maliyeti bilinmekte olup, toplam tama maliyeti tanan miktarla
doru orantl olarak deimektedir.
4. Datm yaplacak mal veya hizmet olarak tanmlanm rn, btn retim ve tketim
merkezleri iin ayn birim ve trde tanmldr.
retim merkezlerine, kaynaklar, ykleme merkezleri veya sunum noktalar; tketim merkezlerine de
hedefler, talep noktalar veya boaltm yerleri denilebilmektedir.
Ulatrma Probleminin Modellenmesi
Ulatrma problemlerinde cevap aranan soru, hangi retim merkezinden, hangi tketim merkezine ne
kadar rn tanacadr. Bu soru ayn zamanda karar deikenlerini tanmlamakta olup, sorunun cevab
rn datm plann verecektir.
Ulatrma problemlerinde iki temel kst vardr:
1. Bir retim merkezinden tm tketim merkezlerine gnderilen toplam rn miktar, retim
merkezinin kapasitesini aamaz.
2. Bir tketim merkezine btn retim merkezlerinden gnderilen toplam rn miktar, tketim
merkezinin talebini karlamaldr.
Birinci tipteki temel kstlarn says retim merkezi saysna eittir. Bu kstlar, bir kaynaktan birden
fazla hedefe rn datlmasna izin verir. Tketim merkezi saysna eit olan ikinci tip temel kstlarla
ise, bir hedef noktasnn talebinin birden fazla kaynaktan karlanmas salanr. Ama, bir yandan
tketim noktalarnn talep gereksinimleri ile retim merkezlerinin sunum miktarlarnda denge salarken,
ayn zamanda toplam tama maliyetini de enkklemektir. Baz durumlarda elde edilecek bir kazancn
enbyklenmesi amac da benimsenebilmektedir.
Karar deikenlerinin negatif deer almamas yannda, temel kstlarn dnda zel kst olmayan
ulatrma problemlerinde, toplam tama maliyeti de miktarla doru orantl olarak deiiyorsa,
problemin zm iin gelitirilen matematiksel model bir dorusal karar modeli olur. Dorusal karar
modelinin nasl oluturulaca izleyen rnek problem zerinde gsterilmektedir.
rnek 8.1.
Bir gda irketine ait ayr fabrikada imal edilen bir rnn, ayr blge deposuna datm
istenmektedir. Fabrikalarn gnderilecek rnle ilgili kapasiteleri srasyla haftada 100, 180 ve 200
kolidir. Depolarn gereksinim duyduu haftalk miktarlar ise srasyla 135, 175 ve 170 koli olarak
bildirilmitir. Tablo 8.1de fabrikalardan depolara olan birim tama maliyetleri grlmektedir. En
dk maliyetli datm plann bulmay salayan dorusal karar modelini gelitiriniz.
173
Tablo 8.1: Birim tama maliyetleri ( / koli)
Fabrikalar
Depolar
1 2 3
1 6 7 4
2 5 3 6
3 8 5 7
Toplam tama maliyetinin enkklenmesinin istendii problemin karar deikenleri,
x
ij
: i. fabrikadan j. depoya tanacak ya da gnderilecek rn miktar (i, j=1,2,3) (koli/hafta)
olarak tanmlanrsa, modele esas olan gsterim, ekil 8.2de grld gibi izilebilir.
ekil 8.2: fabrika ve depolu problemin gsterimi
rnek problemde kaynak says m=3 ve hedef says n=3 olduundan, karar modelinde 9 karar
deikeni (= mn = 33) ve 6 temel kst (= m+n = 3+3) yer alacaktr. Toplam tama maliyetinin
enkklenmesi olarak tanmlanm olan ama, matematiksel fonksiyon olarak aadaki ekilde ifade
edilir.
Problemin iki temel kst, fabrikalarn kapasiteleri ve depolarn taleplerine yneliktir. Kapasitelerin
almadan rn gnderilmesi ile ilgili kstlar aada grlmektedir.
(1. fabrikadan gnderilen toplam miktar 100 koliyi aamaz.)
(2. fabrikadan gnderilen toplam miktar 180 koliyi aamaz.)
(3. fabrikadan gnderilen toplam miktar 200 koliyi aamaz.)
kinci tip kstlar ise, depo taleplerinin karlanmas ile ilgilidir.
(1. depoya gnderilen toplam miktar en az 135 koli olmaldr.)
(2. depoya gnderilen toplam miktar en az 175 koli olmaldr.)
. depoya gnderilen toplam miktar en az 170 koli olmaldr.)
Son olarak, karar deikenlerinin negatif deer alamayacan gsteren iaret kstlar modele eklenir.
Ulatrma problemi iin gelitirilen dorusal karar modeli btn olarak, aada grlmektedir.
174
33 32 31 23 22 21 13 12 11
33 23 13
32 22 12
31 21 11
33 32 31
23 22 21
13 12 11
7 5 8 6 5 5 4 7 6
. .
170
175
135
200
180
100
x x x x x x x x x Enkz
a k
x x x
x x x
x x x
x x x
x x x
x x x
+ + + + + + + + =
+ +
+ +
+ +
+ +
+ +
+ +
Bir tamaclk irketi, silodan drt ileme merkezine tahl
tamaktadr. Tanan rn miktar dolu kamyon yk ile ifade edilmektedir. Silolarn
aylk gnderme kapasiteleri srasyla 6, 4 ve 2 kamyon yk iken, ileme merkezlerinin
aylk talepleri ise srasyla 4, 3, 3 ve 2 kamyon yk olarak bildirilmitir. Silolardan ileme
merkezlerine olan tama maliyetleri Tablo 8.2de verilmi olan ulatrma probleminin
dorusal karar modelini oluturunuz.
Tablo 8.2: Birim tama maliyetleri ( / dolu kamyon yk)
Silolar
leme Merkezleri
1 2 3 4
1 100 20 200 110
2 120 70 90 200
3 40 140 160 180
Ulatrma Tablosu
Ulatrma modelinin boyutlarnn byk olmas (m+n kst, mn deiken) ve problemin zel yaps,
simpleks algoritmasndan baka yntemlerle de zm bulunmasna izin vermektedir. Ulatrma
modelinin zm iin gelitirilen yaklamlar, esas itibar ile dorusal programlamann zelliklerine
dayaldr. Gelitirilen yaklamlarda, ulatrma modeli bir tablo halinde ele alnarak tm ilemler bu
tablodan hareketle yaplr.
Ulatrma tablosu, retim merkezleri satrlarda, tketim merkezleri stunlarda olmak zere mn
sayda hcresi olan bir tablodur. retim ve tketim merkezlerinin kesitii her bir hcre, bir karar
deikenine kar gelir. Her hcrenin sa veya sol st kesine birim tama maliyetleri yazlr. retim
merkezlerinin kapasiteleri, satrlarn en sanda; tketim merkezlerinin talepleri de stunlarn altnda yer
alr.
rnek 1deki gda irketi probleminin ulatrma tablosu Tablo 8.3de grlmektedir. retim
merkezleri olan fabrikalar satrlarda, tketim merkezleri olan depolar ise stunlarda gsterilmitir.
Hcrelerin ierisinde yer alan X
ij
ler karar deikenleridir. rnein X
12
deikeni, birinci fabrikadan
ikinci depoya gnderilen rn miktarna kar gelir.
175
Tablo 8.3: Gda irketi ile ilgili rnein ulatrma tablosu
Dengelenmi Ulatrma Modeli
Eer bir ulatrma modelinin toplam sunum miktar toplam talep miktarna eit ise, dengelenmi
ulatrma modeli, eit deilse dengelenmemi ulatrma modeli olarak adlandrlr. S
i
, i. retim
merkezinin sunum miktar, d
j
, j. tketim merkezinin talep miktar iken, dengelenmi modelde,
eitlii salanr. Dengelenmemi modelde ise,
olarak gerekleir. rnek 1de ele alnan problemin toplam sunum miktar toplam talep miktarna eittir.
Problemde,
olarak elde edildiinden, model dengelenmi ulatrma modeli dir.
Ulatrma tablosu zerinden zm ilemlerini yrtebilmek iin, modelin dengelenmi olmas
gerekmektedir. Bir ulatrma modeli dengelenmemi ise, yapay kaynak ya da yapay hedef noktas
eklentisiyle, model dengelenmi hale dntrlebilir. Bu durumda eklenen yapay noktann sunum ya da
talep miktar, toplam sunum ile toplam talep arasndaki fark kadar olur. Yapay noktalara kar gelen
birim tama maliyetleri ise aksi belirtilmedike sfr olarak alnr. Bazen yapay kaynak noktasna ait
tama maliyetlerine sfr yerine, belirlenen ceza maliyetleri de verilebilmektedir. zleyen iki rnek,
dengelenmemi problemlerin dengeli hale getirilmesiyle ilgilidir.
rnek 8.2. (Toplam sunum miktarnn toplam talep miktarndan ok olduu ulatrma problemi)
Gda irketi rneinde birinci fabrikann kapasitesi 115 birime karlmak istensin. Problemdeki
dier tm parametreler ayn kalmak kouluyla dengelenmi ulatrma tablosunu oluturun.
Toplam sunum miktar =115 +180+200=495
Toplam talep miktar=135+175+170=480
Toplam sunum toplam talebi atndan, dengeyi salamak iin yapay bir depo, ek stun olarak
modele eklenir ve yapay deponun talep miktar 15 birim (= 495 480) olur. Byle bir yer gerekte
olmadndan, bu noktaya olan tama maliyetleri sfr alnr. Bu durum, kullanlmayan kapasite varlna
iaret etmektedir. Tablo 8.4te dengelenmi ulatrma tablosu grlmektedir.
176
Tablo 8.4: Toplam sunum miktarnn toplam talep miktarndan fazla olduu ulatrma problemi
rnek 8.3. (Toplam talep miktarnn toplam sunum miktarndan ok olduu ulatrma problemi)
Gda irketi rneinde, ikinci deponun talep miktar 200 birime ykselmitir. Zamannda
karlanmayan talep iin ceza maliyetinin dikkate alnmas istenmektedir. Ceza maliyeti, talep d
kalmann bir bedeli olarak ortaya kaca ngrlen maliyet olup, birinci depo iin 10, ikinci depo iin
12 ve nc depo iin 15 olaca tahmin edilmektedir. Problemdeki dier tm parametreler ayn
kalmak kouluyla dengelenmi ulatrma tablosunu oluturun.
Toplam sunum miktar =100+180+200=480
Toplam talep miktar=135+200+170=505
Toplam talep toplam sunumu atndan, dengeyi salamak iin yapay bir fabrika modele eklenir ve
kapasitesi 25 birim (= 505 480) olur. Tablo 8.5te ulatrma tablosu grlmektedir.
Tablo 8.5: Toplam talep miktarnn toplam sunum miktarndan fazla olduu ulatrma problemi
Aada birim maliyet tablolar verilmi her bir durum iin
dengelenmi ulatrma tablosunu oluturunuz. Yapay noktalar iin tama maliyetini sfr
alnz (S
i
= i. retim noktasnn kapasitesi, d
j
= j. tketim noktasnn talebi).
177
a. S
1
=10, S
2
=5, S
3
=4, S
4
=6 ; d
1
=10, d
2
=5, d
3
=7, d
4
=9
Tablo 8.6: Birim tama maliyetleri ( / birim)
retim noktalar
Tketim noktalar
1 2 3 4
1 3 4 4 5
2 6 7 4 8
3 4 10 9 3
4 2 3 7 6
b. S
1
=30, S
2
=44 ; d
1
=25, d
2
=30, d
3
=10
Tablo 8.7: Birim tama maliyetleri ( / birim)
retim noktalar
Tketim noktalar
1 2 3
1 12 9 7
2 6 10 8
Dengelenmi ulatrma modelinin tad nemli zellik vardr:
1. retim merkezi says m ve talep merkezi says n iken, dengelenmi ulatrma modelinin
bir temel uygun zmnde en fazla (m + n -1) adet deiken temelde yer alabilir.
2. Her dengelenmi ulatrma modelinin en az bir uygun zm olup, eniyi zm de vardr.
3. Ulatrma modelinde, sunum ve talep miktarlarna kar gelen deerler tamsay ise, karar
deikenleri her temel uygun zmde, dolaysyla eniyi zmde tamsay deer alr.
Ulatrma problemleri, dorusal karar modelini oluturup simpleks algoritmasn kullanarak
zlebilir. Bu durumda problemi dengelemeye gerek yoktur. Fakat dengelenmi model zerinde yaplan
aratrmalarla, ulatrma modelinin simpleks algoritmasna gre ok daha kolay zlebilecei
anlalmtr. Ulatrma problemlerine zg zm algoritmasnda, ncelikle probleme ait dengelenmi
ulatrma tablosu oluturulmakta ve ilemler tablo zerinde gerekletirilmektedir.
Ulatrma problemleri iin gelitirilmi zm algoritmasnn balca adm bulunmaktadr:
1. Bir balang temel uygun zmn bulunmas.
2. Eniyilik snamasnn yaplmas.
3. Eniyi zme eriilmemise izleyen temel uygun zmn bulunarak ikinci adma dnlmesi.
Algoritma admlarn uygularken kullanlabilecek farkl yaklamlar, izleyen blmlerde ayrntl
ekilde ele alnmaktadr.
ULATIRMA MODELNDE BALANGI ZM BULMA
Ulatrma modelinde talep ve sunum kstlarn salayan herhangi bir zm, sfrdan byk eit olma
kouluna da uyuyorsa problem iin uygun bir zmdr. Bununla birlikte, en iyi zm olup olmadn
snayabilmek ve ulatrma tablosu zerinde ilemleri yrtebilmek iin, bu zmn temel uygun
zm olmas gerekir.
Bir ulatrma modelinde herhangi bir uygun zmn, temel uygun zm olma art, temel deiken
saysnn
178
{retim merkezi soytst - tketim merkezi soytst 1)
adet olmasdr.
Bir baka deyile, bir uygun zmde en fazla (m - n - 1) adet deikenin sfrdan farkl deer
alabilmesidir. Eer temel deikenlerden bazlar sfr deerini almsa, zm bozulmu temel uygun
zm olarak adlandrlr.
Bu blmde, dengelenmi ulatrma modeline bir balang temel uygun zm bulmak iin en ok
kullanlan yntem tantlmaktadr. Bu yntemler,
1. Kuzeybat ke yntemi (Northwest corner method)
2. Enkk maliyet yntemi (Minimum cost method)
3. VAM yntemi (Vogels approximation method)
olarak sralanabilir.
Yntemlerin anlatmnda, ulatrma tablosunda i. satr ve j. stunun kesitii hcre (i, j) hcresi olarak
adlandrlmakta ve (i, j) hcresine atanan deer X
ij
ile gsterilmektedir. Ayrca, i. satra kar gelen
kaynan kapasitesi S
i
, j. stuna kar gelen hedefin talep miktar d
j
olarak ifade edilmektedir.
Kuzeybat Ke Yntemi le Balang zm Bulma
Balang temel uygun zm oluturmak iin en basit ve hzl olan yntemdir. Bu yntemde, tama
maliyetleri gz nne alnmaz. Ulatrma tablosunun kuzeybat (en sol st) kesinden gneydou
kesine doru hcrelere deer atanr. Her admda tablodaki bir satr veya stun ilem d braklarak,
tablo daraltlr.
Kuzeybat ke ynteminin admlar aadaki ekilde sralanabilir:
1. Tablonun en kuzeybatsnda yer alan ve saysal bir deer atanmam (i, j) hcresi seilir. Bu
hcreye, i. satrdaki sunum ve j. stundaki talep deerleri gz nne alnarak, mmkn olan
enbyk deer atanr. Atanacak bu deer
eitlii ile gsterilebilir.
2. Atanan miktar, i. satrn sunum ve j. stunun talep deerlerinden karlarak, S
i
ve d
j
deerleri
gncellenir.
3. Gncellenen S
i
ve d
j
deerlerinden en az biri sfr olacaktr. Sfr deerine kar gelen satr veya
stundan sadece birisi ilem d braklarak tablo daraltlr. lem d kalmas, bir daha bu satr
veya stuna atama yaplmasn engellemek iindir. Bu aamada 3 fakl durumla karlalabilir:
Eer S
i
= 0 ise i. satr ilem d braklr.
Eer d
j
= 0 ise j. stun ilem d braklr.
Eer her ikisi de sfr ise, ya satr ya da stundan herhangi birisi ilem d braklr.
Dieri sfr talep ya da kapasiteye sahip olarak daraltlm tabloda kalr.
4. lem d braklmam sadece bir satr veya stun kaldnda algoritma sonlanr. Kalan
miktarlar son satr veya stundaki uygun yerlere atanr. Aksi halde birinci adma dnlr.
rnek 8.4.
Gda irketi problemi iin, kuzeybat ke yntemini kullanarak bir balang temel uygun zm
oluturunuz.
ekil 8.3te, kuzeybat ke ynteminin uygulanmas alt aamada gsterilmektedir. Tama
maliyetleri bu yntemde dikkate alnmadndan, ulatrma tablosunda yer almamtr. Tablodaki her satr
bir fabrikaya ve her stun bir depoya kar gelir. Her admda atama yaplan hcre yuvarlak ierisine
179
alnmakta, ilem d braklan satr veya stunlar, bir sonraki adm banda koyu renkli olarak
grnmektedir. Satrlarn sonunda veya stunlarn altnda grnen X iareti ilgili konumun ilem d
kald anlamna gelmektedir.
ekil 8.3: Kuzeybat ke yntemi ile balang zm bulunmas
lk aamada ulatrma tablosu grlmektedir. kinci aamada tablonun kuzeybatsnda bulunan (1,1)
hcresine kouluna uygun olarak 100 deeri atanr. Birinci satrn kapasite ve birinci
stunun talep miktarlarndan bu deer karlr. Birinci satra kar gelen tm kapasite kullanlm
olduundan, bu satr ilem d braklr.
nc aama banda daraltlm tablonun kuzeybatsndaki (2, 1) hcresine
eitliinden hareketle 35 deeri atanr. kinci satrn kapasite ve birinci stunun talep miktarlar
gncellenir. Birinci stuna kar gelen tm talep karlandndan, bu stun ilem d braklr. Drdnc
aamada daraltlm tablonun kuzeybatsnda bulunan (2, 2) hcresine kouluna uygun
olarak 145 deeri atanr. Bu atama ile ikinci satra kar gelen tm kapasite kullanlm olacandan bu
satr ilem d braklr. Beinci aamada kalan iki bo hcreye de atama yaplarak, tm kapasite ve talep
kstlarn salayan bir temel uygun zm bulunmu olur. Elde edilen zmde,
deerini ve kalan dier karar deikenleri sfr deerini almaktadr. Balang zmn ama fonksiyonu
deerini veren toplam tama maliyeti ise Tablo 8.8de grld gibi 2550 ye eittir.
Tablo 8.8: Kuzeybat ke yntemi ile bulunan zmn toplam tama maliyeti
Datm
Tama
miktar
Birim
maliyet
Toplam
maliyet
Fabrikadan Depoya
1
2
2
3
3
1
1
2
2
3
100
35
145
30
170
6
5
3
5
7
600
175
435
150
1190
Toplam 2550
Sra Sizde 1de verilen ulatrma problemi iin, kuzeybat ke
yntemini kullanarak bir balang temel uygun zm oluturunuz. Balang zmn
tama maliyetini bulunuz.
180
Balang temel uygun zm bulma yntemlerini kullanrken, her
admda daraltlm tablolar ayr ayr dzenlemeye gerek yoktur. Tm ilemler ayn tablo
zerinde rahatlkla yaplabilir.
En Kk Maliyet Yntemi le Balang zm Bulma
Birim tama maliyetlerini esas alan bu yntemde, her seferinde daraltlm tabloda en dk maliyetli
olan hcreye atama yaplr. Atama yaplacak hcrenin seimi haricinde, hcrelere atanacak deerin
belirlenmesi, sunum ve talep miktarlarnn gncellenmesi ve ilem d brakma admlar kuzeybat ke
ynteminde olduu gibidir. Enkk maliyet ynteminin admlar aadaki ekilde sralanabilir:
1. Tablo genelinde en dk maliyete sahip olan ve saysal bir deer atanmam (i, j) hcresi
seilir. En dk maliyetli birden fazla hcre varsa, herhangi biri ele alnabilir.
2. Bu hcreye, i. satrdaki sunum ve j. stundaki talep deerleri gz nne alnarak, mmkn olan
enbyk deer atanr.
3. Atanan miktar, i. satrn sunum ve j. stunun talep deerlerinden karlarak, S
i
ve d
j
deerleri
gncellenir.
4. Sfr deerine kar gelen satr veya stundan sadece birisi ilem d braklarak tablo daraltlr.
5. lem d braklmam sadece bir satr veya stun kaldnda algoritma sonlanr. Kalan
miktarlar son satr veya stundaki uygun yerlere atanr. Aksi halde birinci adma dnlr.
rnek 8.5.
Gda irketi problemi iin, enkk maliyet yntemini kullanarak bir balang temel uygun zm
oluturunuz.
ekil 8.4te, en kk maliyet ynteminin uygulanmas aamalar halinde gsterilmektedir. lk
aamada, tablodaki tm hcreler arasnda en kk tama maliyetli olan (2, 2) hcresi seilir.
kinci aamada, bu hcreye atanabilir enbyk deer kouluna uygun olarak 175
olarak belirlenir. (2, 2) hcresine 175 birim atandktan sonra, ikinci satrdaki kapasite ve ikinci stundaki
talep miktarlar, bu deerin karlmasyla gncellenir. Bu gncelleme sonucunda ikinci deponun tm
talebi karlandndan, ikinci stun ilem d braklmakta ve daraltlm tabloda atama yaplabilir alt
bo hcre kalmaktadr.
nc aamada, daraltlm tabloda enkk tama maliyetine sahip olan (1, 4) hcresine atama
yaplr. Atanan deer eitliinden 100 olarak bulunur. Birinci satrdaki kapasite ve
nc stundaki talep miktarlar gncellenir. Birinci satr ilem d braklnca, daraltlm tabloda
sadece 4 bo hcre kalmaktadr.
Drdnc aamada, deer atanacak hcre, birim tama maliyeti 5 olan (2, 1) hcresidir. Bu hcreye
eitliinden hareketle 5 birim atanarak, ikinci satrn kalan kapasite ve birinci stunun
kalan talep miktarlar gncellenir. Bu aama sonunda atama yaplabilir sadece bir satr kalmtr. Beinci
aamada (3,1) ve (3, 3) hcrelerine kalan deerler atanarak ilem tamamlanr.
181
ekil 8.4: En kk maliyet yntemi ile balang zm bulunmas
Elde edilen balang temel uygun zmde,
deerini ve kalan dier karar deikenleri sfr deerini almaktadr. Balang zmn ama fonksiyonu
deerini veren toplam tama maliyeti
2480
olur. Bu deer, kuzeybat ke yntemi ile bulunandan daha dktr.
Bir iletme sahip olduu 3 fabrikada rettii mamul 3 blgede
pazarlamaktadr. Fabrikalarn aylk kapasiteleri srasyla 200, 160 ve 90 palet ykdr.
Blgelerin talepleri ise srasyla 180, 120 ve 170 palet ykdr. Birim tama maliyetleri
Tablo 8.8de verilmi olup, eer karlanamayan talep olursa, bunun iletmeye palet yk
bana 50ye mal olacan dnmektedir. En kk maliyet yntemini kullanarak,
problem iin bir balang temel uygun zm oluturunuz. Balang zmn tama
maliyetini bulunuz.
Tablo 8.9: Birim tama maliyetleri ( / palet yk)
Fabrikalar
Depolar
1 2 3
1 16 20 12
2 14 8 18
3 36 24 16
VAM Yntemi le Balang zm Bulma
VAM yntemi, en dk maliyet ynteminin gelitirilmi hali olarak dnlebilir. Tablo genelinde,
birinci ncelikli hcre yerine ikinci ncelikli hcreye datm yaplmas halinde birim bana karlacak
frsatlar bulup, en byk frsatn karlmamas esasna dayanr. Aratrma sonular, VAM ile bulunan
bir balang temel uygun zmn, dier yntemlere gre daha az ardtrma ile eniyi zme ulatn
ileri srmektedir.
182
Atama yaplacak hcrenin seimi haricinde, hcrelere atanacak deerin belirlenmesi, sunum ve talep
miktarlarnn gncellenmesi ve ilem d brakma admlar nceki iki yntemde olduu gibidir. VAM
ynteminin admlar aadaki ekilde zetlenebilir:
1. Tablodaki her satr ve stun iin bir ceza puan hesaplanr. Ceza puan, o satr veya stunda yer
alan bo hcrelerdeki en kk iki maliyet arasndaki farktr.
2. Ceza puan en yksek olan satr veya stun seilir. Ceza puan ayn olan birden fazla satr ve
stun varsa, bunlardan herhangi biri ele alnabilir.
3. Bu satrdaki (veya stundaki) bo hcreler iinde en dk maliyetli olan (i, j) hcresi belirlenir.
4. Bu hcreye, i. satrdaki sunum ve j. stundaki talep deerleri gz nne alnarak, mmkn olan
enbyk deer atanr.
5. Atanan miktar, i. satrn sunum ve j. stunun talep deerlerinden karlarak, S
i
ve d
j
deerleri
gncellenir.
6. Gncellenen S
i
ve d
j
deerlerinden en az biri sfr olacaktr. Sfr deerine kar gelen satr veya
stundan sadece birisi ilem d braklarak tablo daraltlr.
7. lem d braklmam sadece bir satr veya stun kaldnda algoritma sonlanr. Kalan
miktarlar son satr veya stundaki uygun yerlere, en kk maliyet yntemine gre atanr. Aksi
halde eer altnc admda i. satr ilem d kaldysa stunlarn, j. stun ilem d kaldysa
satrlarn ceza puanlar yeniden hesaplanr ve ikinci adma dnlr.
rnek 8.6.
rnek 1de verilen problem iin, VAM yntemini kullanarak bir balang temel uygun zm
bulunuz.
ekil 8.5te VAM yntemi ile balang temel uygun zmn elde edilme aamalar grlmektedir.
Ceza puanlarnn yanndaki * iareti, o admdaki en yksek ceza puann ve dolaysyla atama yaplan
hcrenin yer ald satr veya stunu gstermektedir.
lk aamada her satr ve stun iin ceza puanlar hesaplanr. Daha sonra tm ceza puanlar ierisinde
en yksek deerli olan seilir. rnekte satr ve iki stunun ceza puannn en yksek deer olan 2
olduu grlmektedir. Bunlardan herhangi birisi atama yaplacak satr veya stun olarak seilebilir.
kinci aamada birinci satr seilmi ve bu satrdaki en dk maliyetli hcre (1, 3) hcresi olarak
belirlenmitir. Hcreye atanabilecek en yksek deer olan 100 atanr ve birinci satr ilem d
braklarak tablo daraltlr. Stunlarn ceza puanlar yeniden hesaplanr. Bu aama sonunda tablodaki en
yksek ceza puan 3 olup, birinci stuna kar gelmektedir.
nc aamada birinci stundaki bo hcrelerden en dk maliyete sahip olan (2, 1) hcresi ele
alnr. Birinci stun ilem d kalrken, satrlarn ceza puanlar tekrar hesaplanr. Drdnc aamada
daraltlm tablodaki en yksek ceza puanl olan ikinci satr seilerek (2, 2) hcresine 45 deeri atanr.
Beinci aamada ise kalan son iki hcreye atama yaplarak, ilem tamamlanmaktadr.
VAM ile elde edilen balang temel uygun zmde,
deerini ve kalan dier karar deikenleri sfr deerini almaktadr. Balang zmn ama fonksiyonu
deerini veren toplam tama maliyeti
2350
olarak elde edilir. Bu deer, dier iki yntemle bulunanlardan daha dktr.
183
ekil 8.5 : VAM yntemi ile balang zm bulunmas
Balang zm belirlemekte kullanlan zm yntemi arasnda, oluturduklar temel uygun
zmn kalitesi asndan farkllk vardr. Daha iyi zm, ama fonksiyonu deerinin daha kk
deerli olmas ve daha az ardtrma ile sonuca ulalmas anlamna gelmektedir. Genelde en iyi balang
temel uygun zmn VAM yntemi, en ktsn ise kuzeybat ke yntemi vermektedir. Buna
karn, en kolay uygulanan kuzeybat ke yntemi iken, en ilem youn VAM yntemidir. lem
younluu ve daha az ardtrma yapma arasndaki bu dnleme dikkate alnarak, herhangi bir yntemle
zme balanabilir.
Bu yntemleri uygulamadan nce modelin dengelenmi olmas gerektii unutulmamaldr.
Dengelenmemi ise, yapay satr veya stun eklentisi yaplmaldr. Dengelenmi ulatrma probleminin
zel yaps gerei bir temel uygun zmde, en fazla adet temel deiken olabilir. Elde
edilen zmlerden de grld gibi, ulatrma tablosunun 5 hcresinde sfrdan byk deer
bulunmakta, bir baka deyile 5 temel deiken yer almaktadr.
Sra sizde 4te verilen problem iin, VAM yntemini kullanarak
balang temel uygun zm oluturunuz.
184
ULATIRMA MODELNDE ENYLK SINAMASI
Ulatrma probleminin zmndeki ikinci adm eniyilik snamasdr. Eniyilik koullar salanmad
zaman, temelde olmayan en az bir deiken iin ama fonksiyonunda istenen ynde iyiletirme
yaplabilir demektir. Ulatrma problemlemlerinde genellikle enkkleme amac benimsendii iin, bu
durum, toplam tama maliyeti daha az olan baka bir temel uygun zmn var olduu anlamna gelir.
Ulatrma tablosu zerinde yer alan bir temel uygun zmn, en iyi zm olup olmadn snamak
iin farkl yntemler gelitirilmitir. Bu blmde nce dng kavramndan bahsedilmekte, daha sonra
eniyilik snamas iin gelitirilmi atlama ta (stepping stone) ve MODI (Modified distribution method)
yntemleri tantlmaktadr. Mevcut bir zmn eniyiliinin kontrolnde bu iki yntemden herhangi
birisi tercih edilebilir.
Dng Kavram
Ulatrma tablosu zerindeki bir hcreden balayarak, yine ayn hcrede sona eren, kelerinde en az
drt farkl hcrenin sraland kapal gzergaha dng, evrim veya yrnge denmektedir. Bir
gzergahn dng oluturmas iin izleyen artlarn salanmas gerekir:
1. ki ardk hcre, ayn satrda ya da ayn stunda yer almaldr.
2. Dizideki son hcre, ilk hcreyle ortak bir satr ya da stuna sahip olmaldr.
3. ardk hcre ayn satr ya da stunda bulunmamaldr.
ekil 8.6da dng oluturan dizilim rnekleri, ekil 8.7de ise dng oluturmayan rnekler
grlmektedir.
ekil 8.6: Doru dng rnekleri
ekil 8.7: Yanl dng rnekleri
Eniyilik snamas yaparken, ulatrma tablosunda mutlaka (m+n-1)
adet temel deikenin yer almas gerektii unutulmamaldr. Eer bozulmu temel uygun
zm varsa, bu deikenlerden en az biri sfr deeri almtr.
185
Atlama Ta Yntemi ile Eniyilik Snamas
Bu yntem, mevcut zmdeki temel d deikenlerin temele alnmas halinde, ama fonksiyonunda ne
kadar art ya da azalma olacann hesaplanmasna dayanr. Temeld deikenler, ulatrma tablosu
zerinde bir deer atanmam bo hcrelerdir. Eniyiliin snanmas sreci izleyen admlardan
olumaktadr:
1. Mevcut zmn yer ald ulatrma tablosunda bo olan bir hcre seilir (X
ij
).
2. Tablo zerinde X
ij
hcresinden balayan bir dng izilir.
3. Dng zerindeki tm hcreler, X
ij
hcresinden balamak zere
srasyla (+), (-), (+),
eklinde iaretlenir. Dngnn balangcn temel d deiken ya da bo hcre, dngnn
kelerini ise temel deikenler bir dier deyile dolu hcreler oluturmaldr.
4. X
ij
iin deiim deeri (d
ij
) hesaplanr. d
ij
, i. kaynaktan j. hedefe rn gndermenin toplam
tama maliyetinde yarataca deiim miktar anlamna gelmektedir. Bunun iin, (+) iaretli
hcrelerdeki birim tama maliyetleri toplamndan, (-) iaretli hcrelerdeki birim tama
maliyetleri karlr.
5. Her bo hcre iin deiim deeri hesaplanana kadar yukardaki drt adm tekrarlanr.
Deiim deerinin pozitif olmas, bu hcreye bir birim atama yaplmas durumunda toplam maliyetin
artaca anlamna gelmektedir. Eer hesaplanan tm deiim deerleri sfrdan byk eitse, eniyi
zme eriilmitir. Bununla birlikte, deiim deerlerinden en az birinin sfrdan kk olmas, bu
hcreye atama yaplrsa toplam maliyetin daha da deceini gsterir. Bu hcreyi temele alarak mevcut
zm iyiletirmek ve toplam tama maliyetini azaltmak mmkndr. Eer birden fazla negatif iaretli
deiim deeri olursa bunlarn mutlak deerce enbyk olanna sahip olan hcre temele alnmaldr.
rnek 8.7.
rnek 5de kuzeybat ke yntemiyle bulunan balang temel uygun zmn, ulatrma
probleminin eniyi zm olup olmadn atlama ta yntemi ile kontrol ediniz.
Tablo 8.6da kuzeybat ke yntemi ile bulunan balang temel uygun zm grlmektedir.
ncelikle balang zmde, be (m+n-1=3+3-1=5) adet deikenin yer alp almad kontrol edilir.
Tabloda grnen zm, bozulmam bir temel uygun zme kar gelmektedir. Temelde olmayan
deiken says drt olup, tablo zerinde deer atanmam 4 bo hcreye kar gelmektedir. X
12
, X
13
,
X
23
, X
31
olarak veya (1, 2), (1, 3), (2, 3), (3,1) olarak ifade edilebilen bu hcrelerin temele alnmas
durumunda, toplam tama maliyetinde ne ynde bir deiim olaca aratrlacaktr.
Tablo 8.10: Kuzeybat ke yntemi ile bulunmu olan balang temel uygun zm
Atlama ta yntemine gre, her bo hcre iin, hcrenin kendisinden balayan ve kendisinde
sonlanan bir dng izilir ve deiim deeri hesaplanr. rnek problem iin, her bo hcreye ynelik
yaplan ilemler izleyen tablolar zerinde gsterilmi, tablolarn sa tarafnda ise, oluan dngnn
186
dizilimi ve deiim deerinin nasl hesapland verilmitir. Sonu olarak, en az bir deiim deeri negatif
iaretli olduundan (d
13
= 2 < 0) mevcut zmn eniyi zm olmad, daha dk maliyetli bir
zmn var olduu sylenir.
Tablo 8.11den grld gibi d
12
= +3 olmaktadr. Bunun anlam, X
12
ye atanan her 1 birim bana
toplam tama maliyetinin 3 artacadr.
Tablo 8.11: X
12
iin deiim deerinin hesaplanmas
Aadaki tabloda X
13
iin deiim deerinin nasl hesapland grlmektedir. d
13
= 2 olduundan,
X
13
n temelde bir birim yer almas toplam maliyeti 2 azaltacaktr.
Tablo 8.12: X
13
iin deiim deerinin hesaplanmas
Tablo 8.13te grld gibi, d
23
= 1dir. Bu deere gore, X
23
n temelde bir birim yer almas ile
toplam maliyet 1 artacaktr.
Tablo 8.13: X
23
iin deiim deerinin hesaplanmas
X
13
hcresi iin dng
X
13
X
11
X
21
X
22
X
32
X
33
X
13
hcresi iin deiim deeri
d
13
= +46+53+57 = 2
X
12
hcresi iin dng
X
12
X
11
X
21
X
22
X
12
hcresi iin deiim deeri
d
12
= +7+563 = +3
X
23
hcresi iin dng
X
23
X
22
X
32
X
33
X
23
hcresi iin deiim deeri
d
23
= +63+57 = 1
187
Tablo 8.14te grld gibi, d
41
= 1dir. Bu deere gore, X
31
temele alnrsa toplam maliyette birim
bana 1 art olacaktr.
Tablo 8.14: X
31
iin deiim deerinin hesaplanmas
Daha iyi olan zm elde etmek iin, X
13
n temele alnmas yani (1, 3) hcresine deer atanmas
gerekir. zleyen temel uygun zmn nasl bulunaca, daha sonra ele alnacaktr.
Drt ayr tabloda gsterilen bu ilemlerin hepsi tek bir tablo zerinde gerekletirilip dorudan
deiim deerleri hesaplanabilir.
Aadaki tabloda, bir ulatrma problemi iin VAM yntemiyle
bulunan balang temel uygun zm grlmektedir. Bu zmn eniyi zm
olduunu, atlama ta yntemini kullanarak ispatlaynz.
Tablo 8.15: VAM yntemi ile bulunan balang zm
MODI Yntemi ile Eniyilik Snamas
Atlama ta ynteminin bir dezavantaj, tm bo hcreler iin dng bulma ve deiim deeri hesaplama
zorunluluudur. Bu blmde, iyileme yaplacak hcreyi tek tek denemeden bulduu iin atlama tana
gre daha hzl olan bir yntem tantlmaktadr. Balang temel uygun zmn bulunmasnda sunulan
yntemden istediinizi kullanabildiiniz gibi, mevcut zmn eniyi olup olmadn belirlemek iin
de atlama ta veya MODI yntemlerinden herhangi birisini kullanabilirsiniz.
MODI ynteminin admlar aada aklanmaktadr:
1. Ulatrma tablosunda her satra kar gelen retim merkezi iin bir u
i
arpan, her stuna kar
gelen tketim merkezi iin bir v
j
arpan tanmlanr. Toplamda, m adet u
i
ve n adet v
j
arpan
tanmlanm olur.
2. c
ij
, i. retim merkezinden j. tketim merkezine rn tamann birim maliyetine kar gelmek
zere, temelde yer alan her X
ij
deikeni iin aadaki denklem yazlr.
X
31
hcresi iin dng
X
31
X
32
X
22
X
21
X
31
hcresi iin deiim deeri
d
41
= +85+35 = 1
188
3. Elde edilen dorusal denklem sisteminde, denklem says adet, bilinmeyen says
ise adet olacaktr. Denklem sistemini zebilmek iin arpanlardan herhangi birine
sabit bir deer atanr. Bu aamada genellikle u
1
=0 alnr ve dier arpanlar buna bal olarak
hesaplanr.
4. nc admda bulunan u
i
ve v
j
arpanlarnn deerlerinden hareketle, temel d her deiken
iin, aadaki eitliin sonucu belirlenir.
5. Ama toplam maliyetin enkklenmesi olduundan, drdnc admda bulunan deerler
sonucunda izleyen iki durumdan biri ile karlalabilir
a. Her temel d deiken iin
koulu salanyorsa eniyi zm bulunmutur.
b. En az bir temel d deiken iin
olarak gerekleiyorsa, eldeki zm eniyi deildir. lgili temel d deikenin temele
alnmas halinde mevcut zmden daha iyi bir zm elde edilecektir. Birden fazla temel
d deiken iin
oluyorsa, pozitif deerlerin enbyne sahip olan
temel d deiken izleyen zmde yer alr.
MODI testi sonucunda eniyi zm kuulu salanyor ve temel d deikenlerden birisi iin,
olarak gerekleiyorsa Alternatif Eniyi zm olduu sylenir.
rnek 8.8.
rnek 5de kuzeybat ke yntemiyle bulunan balang temel uygun zmn, eniyi zm olup
olmadn MODI yntemi ile kontrol ediniz.
ncelikle dengelenmi ulatrma tablosunda, satrlarda gsterilen sunum merkezleri iin u
1
, u
2
ve u
3
arpanlar; stunlarda gsterilen talep noktalar iinde v
1
, v
2
ve v
3
arpanlar tanmlanr.
Balang temel uygun zmde, bir saysal deer atanm adet deiken temel deiken
olup, X
11
, X
21
, X
22
, X
32
ve X
33
deikenlerine kar gelmektedir. Temel deikenler iin (u, v) denklemleri
yazldnda 6 bilinmeyenli 5 eitliin olduu bir denklem sistemi ortaya kar. zm salayabilmek
iin u
1
=0 olarak kabul edilip, dier deikenler srasyla bulunur. Tablo 8.16da temel deikenler iin
yazlan (u , v) denklemleri ve zm grlmektedir.
Tablo 8.16: u
i
ve v
j
arpanlarnn bulunmas
Temel
Deiken
(u, v) denklemi
u
i
+ v
j
= c
ij
zm
X
11
u
1
+ v
1
= 6 u
1
= 0 v
1
= 6
X
21
u
2
+ v
1
= 5 v
1
= 6 u
2
= 1
X
22
u
2
+ v
2
= 3 u
2
= 1 v
2
= 4
X
32
u
3
+ v
2
= 5 v
2
= 4 u
3
= 1
X
33
u
3
+ v
3
= 7 u
3
= 1 v
3
= 6
189
Yukarda bulunan u
i
ve v
j
lerin yukarda bulunan deerleri yardmyla, temel d deikenler iin,
Tablo 8.17de grld gibi
deerleri hesaplanr. Temel d deikenler, deer
atanmam bo hcrelere kar gelen X
12
, X
13
, X
23
, X
31
deikenleridir. Eniyi zmde tm
deikenlerin
koulunu salamas gerektii halde, X
13
deikeni iin bunun
gereklemedii grlmektedir. Bu durumda eldeki zmn en iyi olmad ve X
13
n temele
alnmasyla daha dk maliyetli bir zm elde edilecei sylenir.
Tablo 8.17: Temel d deikenler iin (u
i
+ v
j
c
ij
) deerlerinin hesaplanmas
Temel D
Deiken
(u, v) denklemi
(u
i
+ v
j
c
ij
)
X
12
u
1
+ v
2
c
12
= 0 + 4 7 = 3
X
13
u
1
+ v
3
c
13
= 0 + 6 4 = 2
X
23
u
2
+ v
3
c
23
= 1+ 6 6 = 1
X
31
u
3
+ v
1
c
31
= 1 + 6 8 = 1
Ulatrma modelinde MODI yntemi ile eniyilik snamas yaparken, her temel deiken iin (u, v)
eitliini yazmaya ve daha sonra denklem sistemini zerek u
i
ve v
j
leri bulmaya gerek yoktur. Bu
hesaplamalar Tablo 8.18te grld gibi, dorudan tablo zerinde yaplr.
Tablo 8.18: MODI yntemi iin ulatrma tablosunun dzenlenmesi
Ulatrma tablosunda satrlarn soluna u
i
ler ve stunlarn zerine v
j
ler yazlr. Tablodaki her
hcrenin sol alt kesindeki kutucukta
denkleminin sonucu yer alr. Temel deikenler
iin bu denklem sfra eitlenerek, u
i
ve v
j
lerin deeri bulunur. Tablo zerinde hesaplamalar yaplrken
u
1
=0 alnarak ie balanr. Ardndan, ilk satrda temel deikenlere kar gelen tm stunlarn v
j
deerleri
hesaplanr. rnekte, birinci satrda sadece X
11
temel deikeni yer almaktadr. Bununla ilikili v
1
deeri,
u
1
+ v
1
c
11
= 0 0 + v
1
- 6 = 0
eitliinden 6 olarak bulunarak tabloda yerine yazlr. Daha sonra v
1
in olduu stunda bulunan temel
deikenle ilikili u
2
deeri,
u
2
+ v
1
c
21
= 0 u
2
+ 6 - 5 = 0
eitliinden -1 olarak elde edilir. Benzer ekilde, u
2
yi kullanarak v
2
, v
2
yardmyla u
3
ve u
3
yardmyla
v
3
bulunur. Tablo 8.19da hesaplanan u
i
ve v
j
deerleri gsterilmektedir.
Sonraki adm, temel d deikenler iin
eitliine kar gelen deerlerin
belirlenmesidir. Bu deerler de kutucuklara yazldktan sonra, daha iyi bir zm olup olmad
deerlendirilir. En iyi zme eriildiini syleyebilmek iin, tablodaki her hcrenin
190
deerinin sfra eit veya sfrdan kk olmas gerekir. Pozitif deerli bir hcrenin olmas, eldeki
zmn eniyi olmadna ve daha iyi bir zm olduuna iaret eder.
Tablo 8.19: Temel deikenlerden hareketle u
i
ve v
j
lerin bulunmas
Tablo 8.20den grld gibi eniyilik koulu salanmamaktadr. X
13
e kar gelen 2 deeri bu
deikenin temele alnmas durumunda ama fonksiyonu deerinin daha kk bir deer alaca anlamna
gelmektedir.
Tablo 8.20: Temel d deikenlerin deerlendirilmesi ve temele girecek deikenin seilmesi
Aadaki tabloda, bir ulatrma problemine kar gelen balang
temel uygun zm grlmektedir. MODI yntemi ile eniyilik snamasn yapnz.
191
Tablo 8.21: VAM yntemi ile bulunan balang zm
ULATIRMA MODELNDE YEN TEMEL UYGUN ZM
Ulatrma modelinin zmnde eniyilik snamasndan sonraki adm, eer en iyi zme eriilmemise
izleyen temel uygun zmn bulunmasdr. Atlama ta veya MODI yntemlerden birisi ile eniyilik
snamas yapldnda, eer en iyi zm elde edilmemise, daha dk maliyetli zm iin hangi
deikenin temelde yer almas gerektii de belirlenmektedir. Eniyilik snamasndan sonra cevaplanmas
gereken iki soru vardr:
1. Temele yeni bir deiken alndnda, zmdeki temel deiken says olan )
eitliinin doru olarak kalabilmesi iin, halen temelde olan bir deikenin de sfr deerini
alarak temelden kmas gerekir. Bu durumda temelden kacak deiken hangisidir?
2. Yeni temel deikene atanacak miktar olsun. nn enbyk deerinin belirlenmesi iin,
kapasite snrlamalar ile talep gereksinimlerinin karlkl dengelenmesi ve temel deikenlerin
negatif deer almamas gerekir. yleyse temele alnacak deikene atanacak deer nedir? Bir
baka deyile, yeni rota zerinde tanabilecek miktar ne kadardr?
Bir deikenin temele alnmas, ulatrma tablosu zerindeki bo hcrelerden birisine deer atanmas
anlamna gelir. Bu durumda satr ve stun ynl dengenin salanmas iin, datm yaplmam bir
hcreye bir birim datm yaplmas halinde, bunun bulunduu satrda ve stunda datm yaplm birer
hcreden birer birim azaltma yaplmaldr. Ulatrma modelinde bir deiken temele alndnda,
temelden hangi deikenin kp, temeldeki deikenlerin hangi deerleri alacaklarn kolaylkla
hesaplamak iin dng kavramndan yararlanlr.
Yeni temel uygun zmn belirlenmesinde izlenecek admlar aadaki gibi sralanabilir:
1. Temele girecek deikenden balamak zere, bir dng izilir. Gerekte temele girecek deiken
iin sadece bir olas dng vardr.
2. Dngdeki hcreler, temele giren hcreden balayarak srasyla (+), (), (+), eklinde
iaretlenir.
3. Temele girecek deikenin alabilecei en byk deer olsun. , () iaretli hcrelerin
deerlerinin enk olarak belirlenir.
4. Dng zerindeki (+) iaretli hcrelere eklenip, () iaretli olanlarn deerinden karlr.
Dngdeki temel deikenlerin deeri deerine bal olarak deiirken, dngde olmayan temel
deikenlerin deeri deimez. Mevcut zmde deerine sahip olan temel deiken sfr deerini alp
temelden karken, yeni temel deiken deeriyle tabloda yer alr. Bylece bir temel uygun zmdeki
temel deiken says olan ) says ile kapasite- talep dengesi korunmu olacaktr.
192
Eer = 0 ise, temele girecek deikenin deeri sfr olacak ve sfr deerine sahip () iaretli bir
hcredeki deiken temelden kacaktr. Bu durumda bozulmu bir temel uygun zm vardr.
Eer dngdeki hcrelerde birden fazla deerine sahip deiken varsa, bunlardan herhangi biri
temelden kacak deiken olarak seilir. Dier deiken ise sfr deeri ile temelde yer kalr ve yine
bozulmu bir temel uygun zm elde edilir.
rnek 8.9.
rnek 8de MODI yntemi ile eniyilik snamas yaplan problemin eniyi zmn bulunuz.
MODI ile balang zm kontrol edildiinde, eniyi zme eriilmedii eer X
13
temele alnrsa
daha dk maliyetli bir zm elde edilecei sonucuna ulalmt. X
13
e ne kadar deer atayacamz
belirlemek ve ayn zamanda satr-stun miktarlar arasndaki dengeyi korumak iin ncelikle, X
13
ten
balayan ve yine X
13
te sonlanan kapal bir dngnn izilmesi gerekir. Daha sonra dng zerindeki
hcreler srasyla (+) ve (-) olarak iaretlenecektir. Tablo 8.22de grlen ve X
13
iin izilen dng
zerindeki hcrelerin dizilimi
X
13
X
11
X
21
X
22
X
32
X
33
eklinde ifade edilebilir. deeri,
eitliinden hareketle 100 olarak bulunur.
Tablo 8.22: Temele girecek deiken X
13
iin oluturulan dng
Dng zerindeki (+) iaretli hcrelerin deeri 100 ile toplanp, (-) iaretli hcrelerin deerinden
100 karlrsa, Tablo 8.23de grlen yeni temel uygun zm elde edilir. Grld gibi X
11
sfr
deerini alarak temelden km, X
13
ise 100 deerini alarak temele girmitir. Dng zerindeki temel
deikenlerin deeri de satr ve stun dengesini bozmayacak ekilde deimitir. 5 olmas gereken
temel deiken says korunmaktadr. Elde edilen yeni temel uygun zmde,
deerini ve kalan dier karar deikenleri sfr deerini almaktadr. Balang zmn ama fonksiyonu
deerini veren toplam tama maliyeti 2350dir.
193
Tablo 8.23: Birinci ardtrma sonunda elde edilen yeni temel uygun zm
Bundan sonraki aama yeni zmn eniyi olup olmadnn snanmasdr. Tablo 8.24de MODI
yntemi ile yaplan eniyilik snamas grlmektedir. Yeni zmde her deiken iin
koulu salandndan, eniyi zm elde edilmitir.
Tablo 8.24: Yeni temel uygun zmn MODI yntemi ile eniyilik snamas
En iyi zmde karar deikenlerinin ald deerler ve datm rotas Tablo 8.25de zetlenmektedir.
Tablo 8.25: Gda irketine ait rn datm probleminin en iyi zm
Datm Tama
miktar
Birim
maliyet
Toplam
maliyet
Fabrikadan Depoya
1
2
2
3
3
3
1
2
2
3
100
135
45
130
70
4
5
3
5
7
400
675
135
650
490
Toplam 2350
Sra Sizde 2bde yer alan iki kaynakl hedefli ulatrma
probleminin eniyi zmn bulunuz.
zm algoritmasnn balca adm bulunduunu unutmayalm:
Bir balang temel uygun zmn bulunmas, eniyilik snamasnn yaplmas ve en iyi
zme eriilmemise izleyen temel uygun zmn bulunarak ikinci adma dnlmesi.
194
ATAMA MODEL
Verilen n adet iin, n adet ilem noktasna datmna ynelik problemler iin gelitirilen atama modelleri,
ulatrma modelleri gibi kendisine zel zm algoritmasna sahip dorusal programlama
modellerindendir.
Atama modelinde ama, genellikle toplam maliyeti enkklemek iin kaynak kullanmnn bire bir
datmnn yaplmasdr. ilerin ilere atanmas ya da ie en uygun kii seimi, atama modeliyle
zlebilecek bir konudur. Aslnda atama modeli, kaynaklar iiler, hedefleri de iler olan zel bir
ulatrma modelidir. Her bir kaynaktaki sunum miktar ve her bir hedefteki talep miktar srekli olarak
1 e eittir. i iisini j iine ulatrmann maliyeti ise c
ij
dir. Atama modeli, normal bir ulatrma
problemi gibi zlebilir. Bununla birlikte, sunum v etalep miktarnn bire eit olmas Macar Algoritmas
olarak adlandrlan basit bir zm algoritmasnn gelitirilmesine yol amtr.
Sistemin zelliine bal olarak belirlenen i ve ilem noktalarnn yannda, problemin parametreleri,
j. ie i. ilem noktasnn atanmasnn sistem etkinliine katk (kar, maliyet vb.) gstergesi olan c
ij
lerdir.
Her atama problemi elemanlar c
ij
ler olan bir matris ya da tablo ile ilikilendirilir. Problemin zmyle
hangi iin hangi ilem noktasna verilecei belirlendiinden, problemin karar deikenleri;
eklinde tanmlanr.
Problemin olutuu sistemin zel yapsnn gerektirdii kstlar dnda, problemin iki temel kst
vardr:
1. Her i yalnz bir ilem noktasna atanabilir.
2. Her ilem noktasna yalnz bir i atanabilir.
Atama probleminin nasl ortaya kt ve dorusal programlama ile modellenmesi izleyen rnek
zerinde gsterilmektedir.
rnek 8.10.
Bir irkette alan teknisyenin (A, B, C) her birinin bir projede almas istenmektedir.
Tamamlanmas istenen proje vardr. Her teknisyenin sahip olduu bilgi, beceri ve yetenek seviyesine
bal olarak projeleri farkl srelerde bitirecekleri tahmin edilmektedir. Teknisyenlerin projeleri
tamamlayacaklar tahmini sreler aadaki tabloda verilmitir. Her teknisyenin sadece bir projede
almas ve her projeye de sadece bir kiinin atanmas isteniyorsa, ilerin en ksa srede tamamlanmas
iin hangi teknisyen hangi projede almaldr?
Tablo 8.26: Teknisyenlerin projeleri tamamlama sreleri (gn)
Proje
Teknisyen 1 2 3
A 22 28 12
B 16 20 22
C 18 24 14
teknisyenin projeye bire bir eletirilmesi istendiinden, problemin bir atama problemi olduu
sylenebilir. Ama, en ksa srede projelerin bitmesini salayacak atama eklinin belirlenmesidir. Karar
deikenleri;
olarak tanmlandnda problemin ama fonksiyonu, projelere ayrlan toplam srenin enkklenmesi
olarak izleyen ekilde ifade edilir.
195
Modelde . iki tip kst vardr:
1. Teknisyenlerin atanma kstlar (Her teknisyen sadece 1 projeye atanabilir)
2. Projelere atama kstlar (Her projede sadece 1 teknisyen alabilir)
Bu aklamalara gre oluturulan dorusal karar modeli aada grlmektedir.
Teknisyen A sadece 1 projeye atanabilir.
Teknisyen B sadece 1 projeye atanabilir.
Teknisyen C sadece 1 projeye atanabilir.
Birinci projede sadece 1 kii alabilir.
kinci projede sadece 1 kii alabilir.
nc projede sadece 1 kii alabilir.
k.a.
Kk boyutlu problemlerde kullanlabilecek bir zm yolu, mmkn olan tm seeneklerin
deerlendirilmesi ve eniyisinin seilmesidir. rnek problem zerinde bunu dnrsek, en fazla 6 farkl
atama yaplabilecei grlr. Tablo 8.27de rnekle ilgili alternatif atama ekilleri ve kar gelen
maliyetler verilmektedir.
Seenek says ok az olduundan bu rnek iin eniyi atamann, kolaylkla altnc seenek oldu
grlebilir. Problem boyutu arttka alternatif atamalarn sralanmas da g olacaktr. rnein 8 iinin 8
projeye bire bir atanmas istendiinde, 8!=40320 alternatif incelenmek zorundadr. Bu yzden tm
alternatifleri karp karlatrmak pratik bir yntem deildir.
Tablo 8.27: Alternatif atama ekilleri ve maliyetleri
SEENEK
PROJELERN
ATANMASI
GC
MALYET (gn)
TOPLAM
MALYET (gn)
1 2 3
1 A B C 22 + 20 + 14 56
2 A C B 22 + 24 + 22 68
3 B A C 16 + 28 + 14 58
4 B C A 16 + 24 + 12 52
5 C A B 18 + 28 + 22 68
6 C B A 18 + 20 + 12 50
Bir iletmede 4 i, 4 tezgaha verilecektir. Her iin tezgahlara
verilmesiyle ortaya kan maliyetler Tablo 8.28de verilmitir. Toplam maliyetin
enkklenmesini salayan dorusal karar modelini oluturunuz.
196
Tablo 8.28: lerin tezgahlardaki birim maliyetleri
ATAMA MODELNN MACAR ALGORTMASI LE ZM
Problemin kendine has yaps sebebiyle, atama modelinin zm iin zel algoritmalar gelitirilmitir.
Bunlardan en yaygn kullanlan Macar Algoritmasdr. Bu algoritma, mmkn olan her alternatifi
deerlendirmeden etkin bir ekilde eniyi zm bulmay salar.
Macar algoritmas ile atama problemini zebilmek iin, aadaki koullarn salanmas gerekir:
Problemin amac bir etkinliin enkklenmesidir.
lem noktas ile i says birbirine eittir (= n.)
Her atama gideri c
ij
0 kouluna uymaktadr (c
ij
: i. ilem noktasn j. ie atamann maliyeti)
Yukardaki koullarn saland bir atama modelinin Macar algoritmas ile zm admlar aada
verilmektedir:
1. Her satrdaki en kk c
ij
seilip, dier atama giderlerinden bu deer kartlarak, satrlara gre
indirgenmi tablo bulunur.
2. ndirgenmi tablonun her stunundaki en kk c
ij
seilip, dier gelerden bu deer
kartlarak, tablo bir kez daha indirgenir.
3. Tablo zerinde sfr deerini alan tm gelerden geen en az sayda dikey ya da yatay dorular
izilir. Eer bulunan doru says = n ise, eniyi zme ulalm olup adm bee, deilse
izleyen adma geilir.
4. zerinden doru gemeyen satr veya stundaki en kk ge seilerek, dorular dnda kalm
dier gelerden bunun deeri kartlr, dorularn kesim noktalarndaki gelere eklenir. nc
adma dnlr.
5. Her doru zerinde sfr deerli hcreler esas alnarak, her i iin yalnz bir j olmak zere, eniyi
zme kar gelen x
ij
deerleri yazlp, eniyi zm bulunur.
rnek 8.11.
Bir nceki rnek problemin eniyi zmn Macar algoritmas ile bulunuz.
Adm 1. Satrlara gre indirgenmi tablonun elde edilmesi
197
Adm 2. Stunlara gre indirgenmi tablonun elde edilmesi
Adm 3. Sfr deerini alan tm gelerden geen en az sayda dikey ya da yatay dorunun izilmesi
Bu admda izilen doru says < n=3 olduundan eniyi zm elde edilemediinden, drdnc
adma geilir.
Adm 4. Tablonun gncellenmesi.
zerinden doru gemeyen satr veya stundaki en kk ge 4 tr. Dorular dnda kalm dier
gelerden 4 kartlr, dorularn kesim noktalarndaki gelere 4 eklenir.
Adm 5. Sfr deerini alan tm gelerden geen en az sayda dikey ya da yatay dorunun izilmesi
izilen doru says n=3 olduundan eniyi zm bulunmutur.
Adm 6. Eniyi atamann yaplmas
ncelikle zerinde sadece bir adet sfr olan satr ya da stunlar kontrol edilerek, bu konumlara atama
yaplr. Birinci satrda A, 3. projede sfr olduundan buraya atanr. Birinci satr ve nc stun ilem
d braklr. kinci atama, nc satrda 1. projeye yaplr. Birinci stun ve nc satr ilem d
braklr. Son olarak B, 2. projeye atanr. ekil 8.7de bu ilem grlmektedir.
198
ekil 8.7: En iyi atamann yaplmas
Eniyi zmn atama maliyeti ise aadaki tabloda grld gibi hesaplanmaktadr.
Tablo 8.29: En iyi zm ve atama maliyeti
Atama
Atama
Maliyeti (gn)
Teknisyen Proje
A 3 12
B 2 20
C 1 18
Toplam 50 gn
Dengelenmi atama modeli, ilem noktas says ile i saysnn eit
olduu bir baka deyile atama giderleri tablosunda satr ve stun saylarnn eit
olduu modeldir. Baz durumlarda, atanacak kii ya da nesne says, grev saysna eit
olmaz. Bu durumda dengelenmemi bir atama probleminden sz edilir.
Problemi Macar algoritmas ile zebilmek iin, ulatrma modellerinde olduu gibi
tabloya yapay satr ya da stun ilave edilir. Eer satr says daha fazla ise, tabloya yapay
stun ya da yapay grev, eer stun says daha fazlaysa, tabloya yapay satr ya da
yapay kii eklenir. Yapay satr veya stun gerekte olmadndan, maliyetleri sfr olarak
alnr.
Yukardaki aklamalar dikkate alarak, rnek 10 da verilen problemde projelere
atanabilir drdnc bir teknisyeni (D) ekleyelim. Bu teknisyenin ilk projeyi 10, ikinciyi 13
ve ncy 8 gnde bitirebilecei ngrlsn. Atama problemini bu haliyle zerek,
hangi teknisyene hangi projenin atanacan belirleyiniz. Eniyi zmde drt
teknisyenden hangisinin projeye atanmayacan bulunuz.
199
zet
Bu nitede, dorusal programlamann zel bir
tr olan ulatrma ve atama modelleri ele
alnmtr. Genel olarak rnlerin birden fazla
retim noktasndan, birden fazla tketim
noktasna datm ile ilgili problemler, ulatrma
veya atama problemleri olarak adlandrlr.
Ulatrma problemelrinde ama, mevcut
kaynaklar kullanarak tm talebi karlayacak
ekilde enkk maliyetli datm plannn
bulunmasdr. Ulatrma probleminin zel bir hali
olan atama problemleri ile genellikle ilerin
makinelere datm, kiilerin ilere tayini,
personelin sat blgelerine datmna benzer
durumlarda karlalmaktadr.
Ulatrma problemlerinde cevap aranan soru,
hangi retim merkezinden, hangi tketim
merkezine ne kadar rn tanacadr. Bu soru
ayn zamanda karar deikenlerini tanmlamakta
olup, sorunun cevab rn datm plann
verecektir. Eer bir ulatrma modelinin toplam
sunum miktar toplam talep miktarna eit ise,
dengelenmi ulatrma modeli, eit deilse
dengelenmemi ulatrma modeli olarak
adlandrlr. Ulatrma tablosu zerinden zm
ilemlerini yrtebilmek iin, modelin
dengelenmi olmas gerekmektedir. Bir ulatrma
modeli dengelenmemi ise, yapay kaynak ya da
yapay hedef noktas eklentisiyle, model
dengelenmi hale dntrlebilir.
Ulatrma problemlerine zg zm
algoritmasnda, ncelikle probleme ait
dengelenmi ulatrma tablosu oluturulmakta ve
ilemler tablo zerinde gerekletirilmektedir.
Ulatrma problemleri iin gelitirilmi zm
algoritmasnn balca adm bulunmaktadr:
Bir balang temel uygun zmn bulunmas,
eniyilik snamasnn yaplmas ve eniyi zme
eriilmemise izleyen temel uygun zmn
bulunarak ikinci adma dnlmesi.
Dengelenmi ulatrma modeline bir balang
temel uygun zm bulmak iin en ok
kullanlan yntem, kuzeybat ke yntemi,
enkk maliyet yntemi ve VAM yntemi
olarak sralanabilir. Balang zm
belirlemekte kullanlan zm yntemi
arasnda, oluturduklar temel uygun zmn
kalitesi asndan farkllk vardr. Daha iyi
zm, ama fonksiyonu deerinin daha kk
deerli olmas ve daha az ardtrma ile sonuca
ulalmas anlamna gelmektedir. Genelde en iyi
balang temel uygun zmn VAM yntemi,
en ktsn ise kuzeybat ke yntemi
vermektedir. Buna karn, en kolay uygulanan
kuzeybat ke yntemi iken, en ilem youn
VAM yntemidir. lem younluu ve daha az
ardtrma yapma arasndaki bu dnleme
dikkate alnarak, herhangi bir yntemle zme
balanabilir.
Ulatrma probleminin zmndeki ikinci adm
eniyilik snamasdr. Eniyilik koullar
salanmad zaman, temelde olmayan en az bir
deiken iin ama fonksiyonunda istenen ynde
iyiletirme yaplabilir demektir. Ulatrma
problemlemlerinde genellikle enkkleme
amac benimsendii iin, bu durum, toplam
tama maliyeti daha az olan baka bir temel
uygun zmn var olduu anlamna gelir.
Ulatrma tablosu zerinde yer alan bir temel
uygun zmn, en iyi zm olup olmadn
snamak iin atlama ta veya MODI yntemi
ullanlabilir. Eniyilik snamas ile, eer eniyi
zme eriilmemeise temel girecek deiken
belirlenir. Bir deikenin temele alnmas,
ulatrma tablosu zerindeki bo hcrelerden
birisine deer atanmas anlamna gelir. Bu
durumda satr ve stun ynl dengenin
salanmas iin, datm yaplmam bir hcreye
bir birim datm yaplmas halinde, bunun
bulunduu satrda ve stunda datm yaplm
birer hcreden birer birim azaltma yaplmaldr.
Ulatrma modelinde bir deiken temele
alndnda, temelden hangi deikenin kp,
temeldeki deikenlerin hangi deerleri
alacaklarn kolaylkla hesaplamak iin dng
kavramndan yararlanlr.
Atama modelinde ama, genellikle toplam
maliyeti enkklemek iin kaynak kullanmnn
bire bir datmnn yaplmasdr. ilerin ilere
atanmas ya da ie en uygun kii seimi, atama
modeliyle zlebilecek bir konudur. Problemin
kendine has yaps sebebiyle, atama modelinin
zm iin zel algoritmalar gelitirilmitir.
Bunlardan en yaygn kullanlan Macar
Algoritmasdr. Bu algoritma, mmkn olan her
alternatifi deerlendirmeden etkin bir ekilde
eniyi zm bulmay salar. Ulatrma ve atama
modellerinin zel zm algoritmalarnn olmas,
dorusal programlama modelleri arasnda ayr bir
neme sahip olmalarn salamaktadr.
200
Kendimizi Snayalm
1. Temel kstlar dnda zel bir kst olmayan
bir ulatrma probleminde, iki fabrikadan
depoya rn gnderilecektir. Fabrikalarn
kapasiteleri srasyla 150 ve 100 birim, depolarn
talepleri ise srasyla 50, 75 ve 125 birimdir.
Karar deikeni x
ij
, i. fabrikadan j. depoya
gnderilen rn miktar olarak tanmlanrsa,
aadakilerden hangisi problemin ikinci
deposuna ait talebin karlanmas ile ilgili
kstna kar gelir?
a. 75
22 12
+ x x
b. 50
21 11
+ x x
c. 125
23 13
+ x x
d. 50
21 11
+ x x
e. 150
13 12 11
+ + x x x
2. Ulatrma tablosu verilen problem iin
aadakilerden hangisi, kuzeybat ke yntemi
ile bulunan balang zmn toplam tama
maliyetine kar gelmektedir?
a. 104
b. 94
c. 40
d. 76
e. 124
3. retim merkezi says m ve talep merkezi
says n olan dengelenmi ulatrma modeli ile
ilgili aadakilerden hangisi yanltr ?
a. Bir temel uygun zmnde en fazla (m+n-1)
adet deiken sfrdan byk deer alabilir.
b. En az bir uygun zm vardr.
c. Bir eniyi zm vardr.
d. En iyi zmde (m+n) adet deiken sfrdan
byk olmak zorundadr.
e. Bir temel uygun zmde, baz temel
deikenler sfr deerini alabilir.
4. Aadaki ulatrma modeli iin enkk
maliyet yntemi ile bir balang temel uygun
zm bulunursa, X
14
ve X
33
deikenlerinin
deeri ne olur?
a. X
14
=225, X
33
= 90
b. X
14
=70, X
33
= 95
c. X
14
=100, X
33
= 90
d. X
14
=200, X
33
= 95
e. X
14
=100, X
33
= 95
201
5. Aadaki ulatrma tablosunda VAM yntemi
ile balang zm bulunmaya balanm fakat
ilemler yarm braklmtr. Tablo kald yerden
balayarak tamamlandnda, aadakilerden
hangisi balang zmn toplam tama
maliyetini verir?
a. 22000
b. 16000
c. 14700
d. 17600
e. 15780
6. Bir ulatrma problemine kar gelen temel
uygun zm aadaki tabloda verilmektedir.
Eniyilik snamas yapmak iin, atlama ta
yntemi kullanlrsa, deiim deerleri (d
ij
) ile
ilgili aadakilerden hangisi yanl olur?
(d
ij
:i. kaynaktan j. hedefe rn gndermenin
toplam tama maliyetinde yarataca deiim
miktar)
a. d
13
= 1
b. d
21
=3
c. d
31
=2
d. d
32
=1
e. d
33
=0
7. Bir ulatrma problemine kar gelen temel
uygun zmn MODI yntemi ile eniyilik
snamas yaplm ve eniyi zmn elde edildii
grlmtr. Tabloda grlen sonulara gre,
aadakilerden hangisi c
12
nin alabilecei bir
deer olabilir?
a. c
12
= 1
b. c
12
= 3
c. c
12
= -1
d. c
12
= -3
e. c
12
= 0
8. Ulatrma tablosunda grnen temel uygun
zm iin eniyilik snamas yaplm ve X
33
n
temele alnmas gerektii ortaya kmtr. X
33
n
izleyen yeni zmde alaca deer,
aadakilerden hangisidir?
a.120
b. 90
c. 30
d. 170
e. 40
202
9. Bilgi lem Merkezinde alan 4 bilgisayar
programcs, drt farkl yazlm gelitirme iinde
grevlendirilecektir. Her biri ayr bir yazlmla
ilgilenmek zorunda olan programclarn yazlm
iin ka saat harcayacaklarna dair ngrdkleri
sreler tabloda grlmektedir. Aadakilerden
hangisi, yazlmlar iin harcanan toplam sreyi
enkkleyecek grevlendirme eklini
gstermektedir?
a. 1C, 2D, 3A, 4B
b. 1A, 2B, 3C, 4D
c. 1A, 2B, 3D, 4D
d. 1B, 2A, 3C, 4D
e. 1D, 2C, 3B, 4A
10. Bir broda alan grevlinin her birine,
yaplacak iten sadece birisi atanacaktr. Her
grevlinin ii tamamlamak iin harcayaca sre
deiebilmektedir. Karar deikeni x
ij
, i.
grevlinin j. ie atanmas durumunda 1, dier
durumda 0 olarak tanmlanrsa,
aadakilerden hangisi atama modelinin kinci
grevli sadece bir ie atanabilir kstna kar
gelir?
a. 1
31 21 11
= + + x x x
b. 1
32 22 12
= + + x x x
c. 1
33 32 31
= + + x x x
d. 1
23 22 21
= + + x x x
e. 1
33 23 13
= + + x x x
Kendimizi Snayalm Yant
Anahtar
1. a Yantnz yanl ise Ulatrma Modeli
balkl konuyu yeniden gzden geiriniz.
2. b Yantnz yanl ise Ulatrma Modelinde
Balang zm Bulma balkl konuyu
yeniden gzden geiriniz.
3. d Yantnz yanl ise Ulatrma Modeli
balkl konuyu yeniden gzden geiriniz.
4. e Yantnz yanl ise Ulatrma Modelinde
Balang zm Bulma balkl konuyu
yeniden gzden geiriniz.
5. c Yantnz yanl ise Ulatrma Modelinde
Balang zm Bulma balkl konuyu
yeniden gzden geiriniz.
6. a Yantnz yanl ise Ulatrma Modelinde
Eniyilik Snamas balkl konuyu yeniden
gzden geiriniz.
7. b Yantnz yanl ise Ulatrma Modelinde
Eniyilik Snamas balkl konuyu yeniden
gzden geiriniz.
8. b Yantnz yanl ise Ulatrma Modelinde
Yeni Temel Uygun zm balkl konuyu
yeniden gzden geiriniz.
9. a Yantnz yanl ise Atama Modelinin
Macar Algoritmas le zm balkl konuyu
yeniden gzden geiriniz.
10. d Yantnz yanl ise Atama Modeli
balkl konuyu yeniden gzden geiriniz.
203
Sra Sizde Yant Anahtar
Sra Sizde 1
x
ij
: i. silodan j. ileme merkezine gnderilen
rn miktar [Dolu kamyon yk/ay]
k.a.
Sra Sizde 2
a.
Toplam sunum miktar = 10 + 5 + 4 + 6 = 25
Toplam talep miktar = 10 + 5 + 7 + 9 = 31
Toplam talep > toplam sunum olduundan, yapay
retim merkezi eklenmelidir. Yapay retim
merkezinin kapasitesi 6 (= 31 25 ) birim olur.
Tabloda 5 nolu satr yapay merkeze aittir.
b.
Toplam sunum miktar = 30 + 44 = 74
Toplam talep miktar = 25 + 30 + 10 = 65
Toplam talep < toplam sunum olduundan,
yapay talep merkezi eklenmelidir. Yapay
merkezin talebi 9 (=74-65) birim olur. Tabloda
4 nolu stun yapay merkeze aittir.
Sra Sizde 3
Aada aamalar halinde balang zmn
bulunmas grlmektedir. zellikle beinci ve
altnc aamaya dikkat edilmelidir. Beinci
aamada hem stun hem satrda sfr deeri
kalmtr. Byle bir durumda satr veya stundan
sadece biri ilem d braklr. rnekte stun
ilem d braklarak, satrda kalan kapasite
olarak 0 deeri braklmtr. zleyen aamada
ise sfr deeri (2,4) hcresine yerlemitir.
Balang zmn bir temel uygun zm
olmas iin (m + n - 1) adet deiken zmde
yer almak zorunda olduundan, sfr deeri
tabloda braklmaktadr. Bulunan temel uygun
zm bozulmu temel uygun zm dr.
Toplam tama maliyeti ise 1140 (= 4x100 +
2x20 + 1x70 + 3x90 + 0x20 + 2x180) olarak
bulunur.
204
Sra Sizde 4
Toplam kapasite =200 + 160 + 90 = 450
Toplam talep = 180 + 120 + 170 = 470
Toplam talep daha fazla olduundan, problemi
dengelemek iin tabloya kapasitesi 20 palet yk
olan yapay fabrika eklenir ( 4 nolu)
En kk maliyete gre bulunan balang zm
admlar oklarla gsterilmitir. Balang
zmn toplam tama maliyeti 8280 dir.
Sra Sizde 5
VAM yntemine gre bulunan balang zm
admlar oklarla gsterilmitir. Balang
zmn toplam tama maliyeti 6840 dir.
Sra Sizde 6
Tabloda iki bo hcrenin deiim deeri
hesaplanr.
1. X
22
iin deiim deeri
Dng : X
22
X
12
X
11
X
21
d
22
=+ 80 7 +6 15 = +64
2. X
23
iin deiim deeri
Dng : X
23
X
13
X
11
X
21
d
23
=+78 8 +6 15 = +61
Bo hcrelerin deiim deerleri (+) iaretli
olduundan, daha iyi bir zm olmad, eldeki
zmn en iyi zm olduu sylenir.
205
Sra Sizde 7
MODI ile yaplan eniyilik snamas sonucunda
elde edilen
deerleri tabloda
grnmektedir. Her temel d deiken iin
eitlii salanmadndan,
mevcut zm en iyi deildir. X
12
, X
13
ve X
32
ye
ait deerler sfrdan byk kmtr.
Daha iyi bir zm iin, bu deikenlerin
arasnda en byk pozitif deerli
ye sahip olan X
32
(u
3
+v
2
-c
12
=6)
temele girmelidir.
Sra Sizde 8
A. Balang temel uygun zm
Toplam tama maliyet = 675
Aadaki tablo zerinde, MODI testine gre
eniyi zme eriilmedii grlmektedir. X
12
temele alnr, X
11
veya X
22
temelden kar.
B. Birinci ardtrma sonunda elde edilen
zmn toplam tama maliyeti = 500
MODI testine gre eniyi zm elde edilmitir.
Sra Sizde 9
k.a.
206
Sra Sizde 10
Atama tablosunu dengelemek iin birim
maliyetleri 0 olan drdnc bir stun eklenir.
En iyi zmde, teknisyen A nc, teknisyen B
ikinci ve teknisyen C birinci projeye
atanmaktadr. Teknisyen D yapay stuna
atanmtr. Bu durum drdnc teknisyenin hi
bir projeye atanmayaca anlamna gelir.
Yararlanlan Kaynaklar
Hillier, F.S. ve Lieberman, G.J. (2010).
Introduction to Operations Research, New
York: McGraw-Hill, Inc.
Kara, . (2000). Dorusal Programlama,
stanbul: Bilim Teknik Yaynevi.
ztrk, A. (2011). Yneylem Aratrmas,
Bursa: Ekin Yaynevi.
Taha, H.A. (2011). Operations Research: An
Introduction, Upper Saddle River, N.J.: Prentice
Hall.
Winston, W.L. (2004). Operations Research:
Applications and Algorithms, Cengage:
Brooks/ Cole.
You might also like
- Tesis Planlama Final Cevap AnahtariDocument4 pagesTesis Planlama Final Cevap AnahtariAbdullah TatarNo ratings yet
- Arena Animasyon KomutlarıDocument34 pagesArena Animasyon Komutlarıbetdogru100% (1)
- Tesis Planlama 1.kisimDocument34 pagesTesis Planlama 1.kisimİmran EvirgenNo ratings yet
- Veri Bilimi - KitapDocument184 pagesVeri Bilimi - KitapAli 'BoduroğluNo ratings yet
- Tesis Planlaması FöyDocument10 pagesTesis Planlaması FöyGobelinuS0% (1)
- Ybs401u - Yöneylem AraştirmasiDocument212 pagesYbs401u - Yöneylem AraştirmasiHakan KapucuNo ratings yet
- Yoneylem ArastirmasiDocument23 pagesYoneylem Arastirmasituggenyu0% (1)
- Mühendi̇sli̇k Ekonomi̇si̇Document36 pagesMühendi̇sli̇k Ekonomi̇si̇Fulya Ülger AydoğduNo ratings yet
- Kalite İçin Deney TasarımıDocument13 pagesKalite İçin Deney TasarımıemrreuysallNo ratings yet
- Yöneylem Ders NotlarıDocument73 pagesYöneylem Ders NotlarıErkin Topcu100% (1)
- Yoneylem Arastirmasi Ders NotuDocument117 pagesYoneylem Arastirmasi Ders NotumakoxxxNo ratings yet
- Benzetim Ve ModelDocument60 pagesBenzetim Ve ModelMurat KılıçNo ratings yet
- İş Etüdü PDFDocument100 pagesİş Etüdü PDFirmakNo ratings yet
- Yöneylem 1 FinalDocument7 pagesYöneylem 1 FinalBatuhan UluNo ratings yet
- Celal Bayar Üniversitesi - Işletme FinansmanıDocument3 pagesCelal Bayar Üniversitesi - Işletme FinansmanıIsmail SarıtekeNo ratings yet
- Benzetim ModellemeDocument23 pagesBenzetim ModellemeGizem YavuzNo ratings yet
- Yoneylem ArastirmasiDocument249 pagesYoneylem Arastirmasiankarali_100% (3)
- 1-Tamsayılı Optimizasyon (Modelleme) (2sunu)Document20 pages1-Tamsayılı Optimizasyon (Modelleme) (2sunu)Cüneyt Karadağ100% (3)
- Denetim Ara SınavDocument9 pagesDenetim Ara SınavRemezan DarğınNo ratings yet
- Yapay ZekaDocument26 pagesYapay ZekaBeyhan GülNo ratings yet
- Tesi̇s Planlama - DN1314Document139 pagesTesi̇s Planlama - DN1314yigitilgaz100% (1)
- Endüstri Mühendisliği Bitirme TeziDocument19 pagesEndüstri Mühendisliği Bitirme TeziBurcu Adıgüzel100% (1)
- Sıra Bekleme Sistemlerinde Simulasyon TekniğiDocument173 pagesSıra Bekleme Sistemlerinde Simulasyon TekniğiFatih BuyrulNo ratings yet
- Endüstri Sorular PDFDocument190 pagesEndüstri Sorular PDFErdal BüyükbatlarNo ratings yet
- Mühendislik İstatistiği Final ÖdeviDocument9 pagesMühendislik İstatistiği Final ÖdeviMesut DoğanayNo ratings yet
- YaemDocument199 pagesYaemVolkan SÖNMEZNo ratings yet
- Bilgisayar Programlama PDFDocument24 pagesBilgisayar Programlama PDFSerkanurdan TaşayNo ratings yet
- Modelle Me Vesi Mu Lasy OnDocument239 pagesModelle Me Vesi Mu Lasy OnFatih BuyrulNo ratings yet
- Erp Ve Uretim Yonetimi PDFDocument22 pagesErp Ve Uretim Yonetimi PDFEnder BükenNo ratings yet
- Istatistik Ders NotuDocument11 pagesIstatistik Ders NotuwvolfNo ratings yet
- Enm 307 Bolum 1Document20 pagesEnm 307 Bolum 1ultigamNo ratings yet
- Benzetim Ve Modelleme - 1Document60 pagesBenzetim Ve Modelleme - 1Çağrı Bilge100% (1)
- Yon Eylem Ders NotlarıDocument66 pagesYon Eylem Ders Notlarımustafaaslan11No ratings yet
- Hafta Talep Tahmin YöntemleriDocument43 pagesHafta Talep Tahmin YöntemleriHilal CetinNo ratings yet
- Endustri Muhendisligi SorulariDocument21 pagesEndustri Muhendisligi SorulariOğuzhan TosunNo ratings yet
- Benzetim 2023 FinalDocument5 pagesBenzetim 2023 FinalMurat KılıçNo ratings yet
- Final Calisma Sorulari 2018Document5 pagesFinal Calisma Sorulari 2018Fatih BuyrulNo ratings yet
- Mikro Iktisat Os PDFDocument128 pagesMikro Iktisat Os PDFSelsabil DekhiliNo ratings yet
- Bi̇lgi̇sayar Ve ProgramlamayaDocument171 pagesBi̇lgi̇sayar Ve ProgramlamayaisoNo ratings yet
- Ergonomi̇ Ve İş Etüdü Ders NotuDocument246 pagesErgonomi̇ Ve İş Etüdü Ders NotuSabri GÖÇERNo ratings yet
- Kanvas Is ModeliDocument2 pagesKanvas Is ModelisirineNo ratings yet
- Iktisat Okuma ListesiDocument29 pagesIktisat Okuma ListesiKonstantinos KavafisNo ratings yet
- Nesne Tabanli ProgramlamaDocument20 pagesNesne Tabanli ProgramlamaMehtap PetekNo ratings yet
- Ergonomi̇ 1Document13 pagesErgonomi̇ 1Duygu IskenderNo ratings yet
- Optimizasyon TekniğiDocument69 pagesOptimizasyon Tekniğicanavarsanayok100% (1)
- Inşaat MuhasebesiDocument185 pagesInşaat MuhasebesiTümay TurhanNo ratings yet
- Montaj Hatti DengelemeDocument58 pagesMontaj Hatti DengelemeNamik NamNo ratings yet
- Hafta 2Document83 pagesHafta 2Ahmet CiritNo ratings yet
- IstatistikDocument43 pagesIstatistikAbdurrahman Hazer0% (1)
- 2.bölüm RekabetDocument62 pages2.bölüm RekabetKübra KoralNo ratings yet
- Yönetsel Yetki̇nli̇kleri̇n Anali̇zi̇ Ve Yöneti̇m Düzeyleri̇ AçisindDocument220 pagesYönetsel Yetki̇nli̇kleri̇n Anali̇zi̇ Ve Yöneti̇m Düzeyleri̇ AçisindHalil İbrahim KüplüNo ratings yet
- Yarı Saydam Beton: Nasıl görünür duvarlar? Gece ve gündüz aydınlatma için nano optiklerin kullanılması ve ince beton ile optik fiberlerin karıştırılmasıFrom EverandYarı Saydam Beton: Nasıl görünür duvarlar? Gece ve gündüz aydınlatma için nano optiklerin kullanılması ve ince beton ile optik fiberlerin karıştırılmasıNo ratings yet
- Ist205u PDFDocument209 pagesIst205u PDFmassiveggNo ratings yet
- 12 Pazarlama Problemlerinin Çözümünde Yöneylem Araştırmasının Önem..Mustafa Yücei... 7 Syf tlf05362573267Document7 pages12 Pazarlama Problemlerinin Çözümünde Yöneylem Araştırmasının Önem..Mustafa Yücei... 7 Syf tlf05362573267serkancicek1988No ratings yet
- 320-4723411356982225660 - Nite 6 Ara T Rma Y Ntem Ve Modeli PDFDocument17 pages320-4723411356982225660 - Nite 6 Ara T Rma Y Ntem Ve Modeli PDFMehmetNo ratings yet
- Endüstri Mühendisliğine GirişDocument12 pagesEndüstri Mühendisliğine GirişUtku CanNo ratings yet
- Araştırmanın BoyutlarıDocument5 pagesAraştırmanın BoyutlarıranaNo ratings yet
- Eylem Araştirmasi Rapor-Zeki̇ye DoğuDocument13 pagesEylem Araştirmasi Rapor-Zeki̇ye Doğuzekiye yamaçlıNo ratings yet